多旋翼无人机近地遥感光谱成像装置研制
2020-04-09兰玉彬龙拥兵李继宇
赵 静,龙 腾,兰玉彬,龙拥兵,李继宇
多旋翼无人机近地遥感光谱成像装置研制
赵 静1,龙 腾1,兰玉彬1,龙拥兵1,李继宇2※
(1. 华南农业大学电子工程学院,广州 510642; 2. 华南农业大学工程学院,广州 510642)
为了满足多旋翼植保无人机悬停、定速飞行2种作业模式下近地遥感的需求,该文设计了一套液晶光谱成像装置。首先,通过硬件、软件开发,实现了装置采集模块、控制模块和通信模块3部分的协同工作。其中,采集模块由16位CCD灰度相机、消色差镜头、液晶可调滤光器以及UV镜组成,控制模块由微电脑处理器和USB连接器组成,通信模块由数传、北斗定位系统和地面工作站组成。由5V3A电源供电。开发相应软件实现各硬件模块之间的协同控制,以及数据处理的功能。数据处理功能既可用于拍摄前装置的参数调节,又可单独用于光谱图像分析。基于本装置的数据采集方法,实现了光谱图像采集与旋翼无人机2种飞行模式的匹配。通过室内模拟飞行试验和田间试验,对装置性能进行测试。结果显示装置可获得清晰的光谱图像,光谱范围400~720 nm,光谱间隔最高可达到2 nm,空间分辨率1 392×1 040,且光谱连续平滑、特征稳定可靠。本装置基于面阵分光原理,采用密接耦合光路设计、核心器件同步触发技术,结构紧凑、抗震性好、稳定度高,适合植保作业,有望应用于精准农药喷施、作物处方图生成等多个领域。
无人机;遥感;高光谱技术;液晶光谱成像装置
0 引 言
无人机以其体积小,重量轻,成本低,飞行操控灵活的特点,近年来被广泛应用于灾害检测、监控巡查、农业植保等领域。无人机根据机型结构可分为固定翼和旋翼2种。旋翼无人机具有机动性强、可垂直起降、能够在空中悬停、大幅度转弯的特点,且在设计制造难度和负载能力上具有优势,因此在中国广大农村植保作业中有较强的实用性[1-7]。而在植保无人机众多应用领域,包括农药喷洒[8-10]、信息监测[11-16]、植物表型[17]等,遥感装置都是不可或缺的设备,为其作业提供病害疫情、作物长势、环境情况等基础信息。如Huang等[18]提出通过无人机遥感精确定位稻田中的杂草,可使无人机喷施除草剂的用量节约58.3%到70.8%。Zhao等[19]通过遥感监测冬小麦氮素和籽粒蛋白质含量,可得到更优的施肥和收割策略。Yeom等采用无人机光谱遥感技术对棉花棉铃期进行了探测,用于棉花产量预估[20]。
光谱成像是无人机遥感的重要方式,以光谱分辨率高低可分为高光谱遥感、多光谱遥感等。它是保障植保无人机精准作业的重要技术手段。目前国内外主流的近地高光谱成像装置多基于光栅分光,推扫式成像,即面阵成像探测器垂直面向待测目标,每个瞬视场获取一维空间内的全波段光谱信息,通过搭载平台水平运动,完成二维空间的扫描,从而合成光谱图像立方体[21-28]。代表产品有采用透射式光栅分光的芬兰Specim、采用反射式光栅分光的美国Headwall Nano等。这类型设备具有波段数多、光谱信息丰富等优点,但无法满足植保低空遥感的需求,主要表现在:只能工作于定速飞行状态下,无法匹配无人机悬停工作状态;采集波段不能任意组合,对于已明确光谱特征波段的植保对象无法灵活调节波段参数。目前国内外主流的近地多光谱成像装置多由4个透射式滤光片配合4个光电传感器构成,可得到近红外、红边、红、绿4幅宽光谱图像,代表产品有法国Parrot系列。这类设备体积小、重量轻、造价低、用途广泛[29-30],但因其波段固定、波段数少、光谱信息不足,在植物病害[31]、营养胁迫[32]等植保遥感领域难以应用。总之,上述通用型遥感设备无法满足旋翼无人机低空植保作业的需求。
为解决上述问题,一方面,可通过寻找更优分类算法提高检测精度,以弥补多光谱成像光谱信息的不足[33];另一方面,可采用新型分光器件和相应的技术,以更好地满足无人机植保作业需求[34]。随着无人机低空植保遥感应用领域不断扩大、需求急剧增加,亟待更多新方法、新技术出现。本文针对多旋翼无人机具有悬停、定速飞行2种作业模式的特点,在多光谱面阵成像技术研究成果的基础上,提出了基于液晶滤光器面阵分光的光谱成像方案,在提高光谱分辨率的同时,解决了光栅分光只能通过无人机推扫成像的问题。通过核心器件同步触发技术,实现了光谱波段参数灵活选择、自由调节,为满足植保无人机近地遥感需求提供了一套高效可行的装置和方法。
1 装置设计
1.1 装置结构
机载光谱成像装置由采集模块、控制模块和通信模块3部分构成,核心器件主要有分光器、探测器、镜头、北斗定位系统、微电脑控制器、数传模块等。分光器采用液晶可调滤光器(LCTF,PerkinElmer Varispec VIS-10-20),光电探测器采用Lumenera LM165M科研级16位CCD灰度相机,配以消色差镜头(Schneider Xenoplan 1.9/35)。北斗定位系统通过GPS模块(MT3333芯片BD2双模北斗双系统导航授时模块开发板 BD-126K)获取位置信息,采用GPS/北斗/GLONASS 三系统七频测量型天线进行差分,使得精度可达到2 cm。微电脑控制器为MOREFINE M1s,可容纳30GB高光谱图像数据,在TF卡拓展条件下可另外增加128GB储存空间,运行系统为Windows 10。
装置基本结构如图1所示,LCTFs前置分光,通过法兰环与镜头密接,后接CCD。由5V3A的电源给微电脑控制器供电,微电脑控制器输出稳定的电流给USB连接器,USB连接器同时连接液晶滤光器、CCD和北斗定位系统以实现同步触发,并实现与地面工作站无线通信。

图1 装置结构
1.2 采集模块
采集模块实现装置采集功能,是整套装置的核心。为了匹配旋翼无人机悬停采集工作模式,采用了面阵分光成像方案。为了实现连续光谱波段图像采集,选择了液晶可调滤光器为核心分光器。本文选用的液晶可调滤光器工作波长范围400~720 nm,包含了农作物光谱信息最重要的特征区间可见波段反射峰、可见波段吸收峰、红边上升沿;光谱最小间隔2 nm、光谱分辨率10 nm,均可任意选择调节,保障了植保作业的灵活性。16位CCD配以35 mm短焦成像镜头,使信号动态范围达到6.5万个等级,图像最高空间分辨率达到1 392×1 040,工作最小距离达到30 cm,可分辨厘米级地物、获得作物叶片级光谱,提高了作物低空遥感数据精度。采用滤光器前置光路结构,滤光器、镜头、相机密接,装置结构紧凑,封装后整机质量1.25 kg,减轻了无人机载荷。图2为图像采集模块设计图。
在数据采集的过程中,需将采集模块搭载于模拟飞行器(图3a)或旋翼无人机(图3b)上,装置镜头保持垂直向下。地物反射光谱经LCTF二维分光后,由CCD接收并转换为光电图像,保存于微电脑控制器中。在采集图像的同时,同步提取北斗定位数据。表1为采集模块的设计参数。

1.16位CCD 2.消色差镜头 3.液晶可调滤光器 4.微型电脑控制器 5.外壳
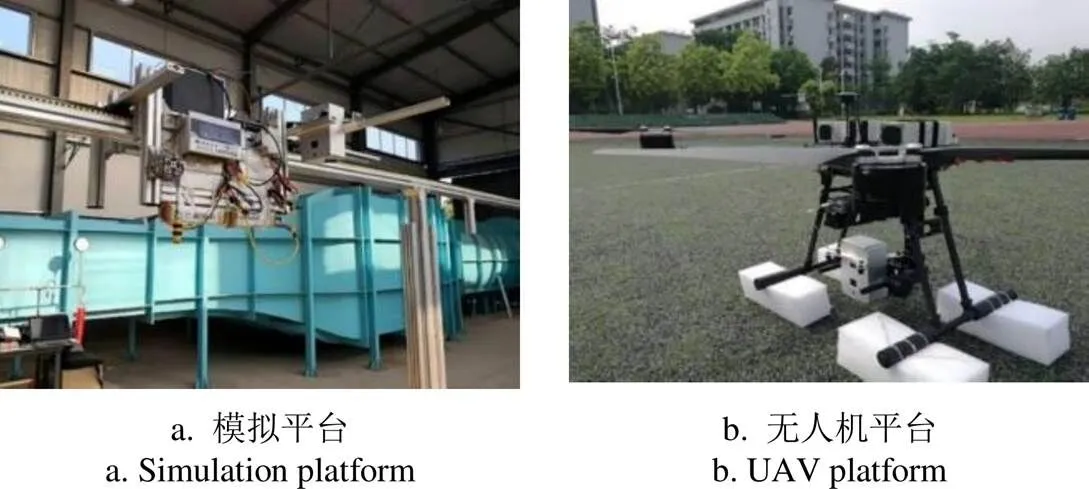
图3 采集模块搭载平台

表1 采集模块设计参数
1.3 控制与通信模块
控制模块实现设置采集模块参数的功能,通信模块实现无线传输控制信号以及无线传输北斗数据的功能。装置与地面站的通信采用数传无线控制方案,适用于远距离高光谱成像装置控制,控制终端与装置距离≥1 km。微型电脑控制器通过USB通用串行总线与数传模块连接,与装置控制终端数传通信。数传通信用于发送拍摄参数指令。
1.4 控制软件开发
自行开发的控制软件实现采集模块、控制模块和通信模块之间的协同工作,主要包括3大功能:1)实现LCTF、CCD和差分北斗系统同步触发、协同工作;2)光谱图像采集参数设置、数据保存;3)光谱提取,打开和处理采集的高光谱图像、分析高光谱图像灰度直方图和光谱、进行标准曲线矫正功能以及实时预览等功能。软件以Windows 7及以上版本为工作平台,采用C++编程环境。软件的运行需要C++运行库支持。编译工具采用visual studio 2008(X86),图形库采用OpenCV3.0.0。
在图像采集前,需通过程序控制的参数有:相机拍摄位深、曝光时间、增益、帧频、白板校正模式等。液晶可调滤光器(LCTFs)起止波段范围、循环步长、延时时长、循环模式等;高光谱图像记录拍摄时间、拍摄参数信息等。软件设计流程图如图4所示。
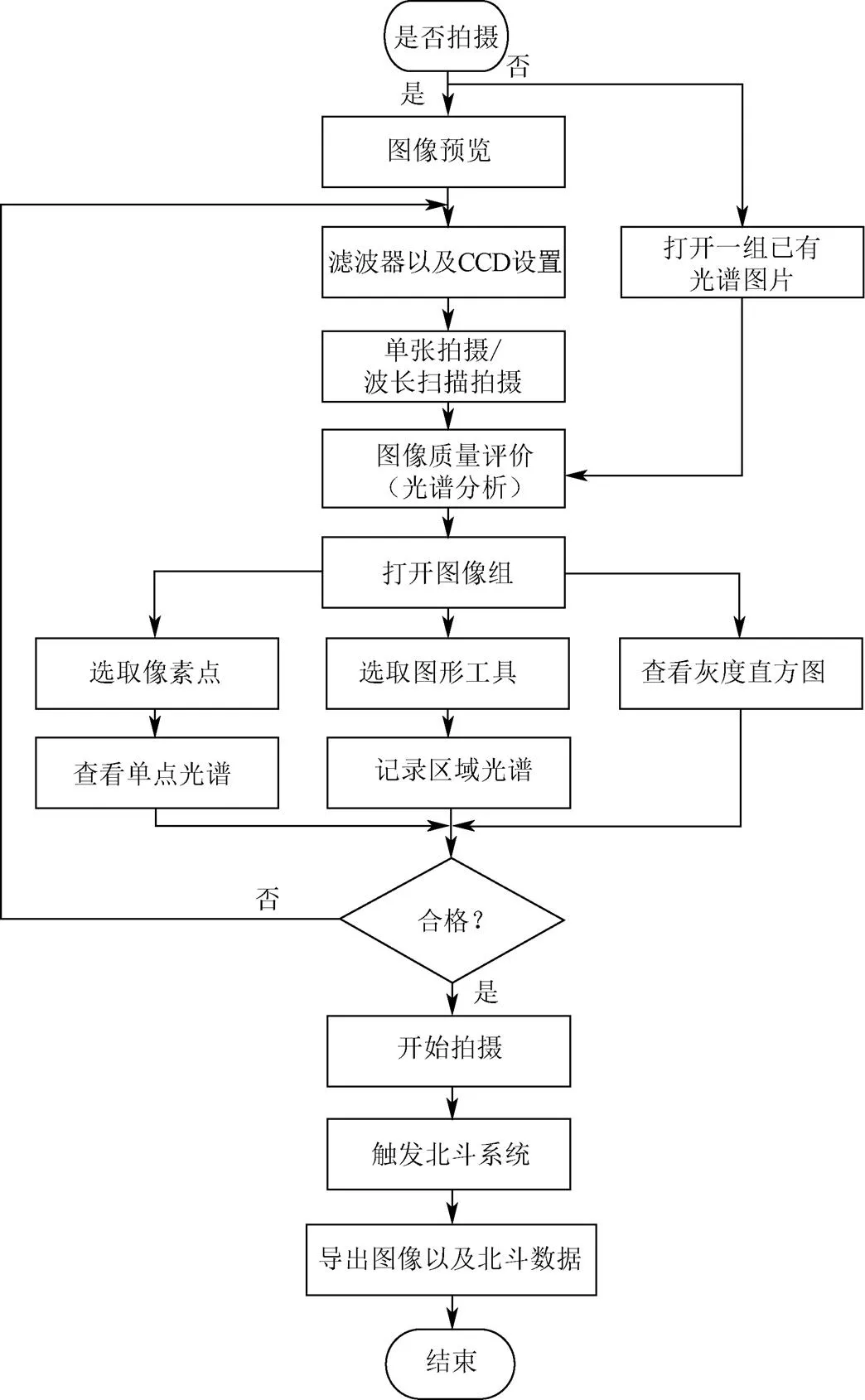
图4 软件设计流程
软件数据处理功能既可用于正式拍摄前的参数调节,又可单独用于光谱图像分析。用于参数调节时,首先,通过滤波器以及CCD的设置来确定拍摄参数,再确定单张拍摄还是扫描拍摄,之后进入图像质量评价即光谱分析,来判断图像拍摄参数设置是否合适,主要通过用点和矩形区域选择工具来观察光谱,并通过灰度直方图来分析图像质量。若合格则进入下一阶段,否则重新设置滤波器以及CCD参数。最后开始拍摄并触发北斗系统得到图像以及北斗数据,流程结束。用于光谱图像分析时,直接打开一组光谱图片,可获得灰度直方图;选取ROI区域,可提取其光谱,并进行图像质量分析。
2 光谱图像采集方法
在装置设计开发完成后,需根据装置的工作原理,对其采集方法进一步研究和规范。遥感光谱图像采集包括成像装置调平衡和参数设置。
2.1 装置调平衡
将装置与云台连接之后,首先需手动调节云台的俯仰轴,横滚轴以及平移轴的平衡,使装置处于一个相对水平的位置。粗调之后,用Ronin调参(1.0.0)软件进行微调,进入软件连接上云台后,点击电机→自动校准,转动遥控器使装置镜头向下,此时扭动装置会发现有明显的扭力会使它恢复原状。直到垂直状态,完成调平。
2.2 参数设置
装置需设定的参数有拍摄位深、曝光时间、增益、起止波段范围、循环步长、延时时长等。其中,拍摄位深有8和16 bit两种选择,曝光时间从1 ms至2 000 ms可调,起止波段最大范围为400~720 nm,在此区间内可任意选择范围;循环步长最小2 nm;延时时长应等于或大于曝光时间。具体参数值因天气情况、对数据质量的要求而不同,表2是部分参数的常规设置。这些参数的设定均在控制软件中完成。

表2 装置参数
除上述装置参数设定外,当在无人机定速飞行模式下工作时,还需设置装置参数和无人机飞行参数匹配,以满足图像拼接需求,进而获得大视场光谱图像。基于本文装置的分光原理,遥感数据采集方法如图5所示。图中设每个光谱立方体采集波长分别为400、500、600 nm的3张光谱图像,共有3个光谱立方体。通过拍摄参数和飞行速度匹配,保障相邻3个光谱立方体内对应光谱图像有20%的冗余。对应波段图像拼接完成后,进行图像配准,得到大视场光谱立方体,完成遥感数据采集。

图5 遥感数据采集方法
根据上述数据采集方法,光谱成像装置、无人机参数设定需满足如下条件:


式中为光谱分辨率;为无人机的飞行速度,m/s;为图像所需冗余度,为了保障光谱图像拼接质量,冗余度一般设置在10%至40%之间,视地物特征而定;为无人机的飞行高度,m;为装置垂直视场角(即装置前进方向视场角),(°)。
3 装置测试
为了测试装置性能,项目组分别开展了室内、室外近地遥感试验。室内试验地点为广东省广州市华南农业大学风洞实验室(113°22′E,23°06′N),试验环境无风场干扰、光照均匀稳定,装置搭载于模拟飞行器,以模拟在无人机理想飞行状态下的光谱图像采集情况。室外试验地点为河南新乡中国农业科学院植物保护研究所小麦实验基地(113°55′E,35°18′N),试验当天微风、天气晴朗,装置搭载于四旋翼无人机。
3.1 室内试验
3.1.1 模拟飞行器参数
室内滑动模拟飞行器选用110三相混合式步进电机(浙江奔腾数控电子技术有限公司),具有步距角小、力矩大、动态性能稳定、易于启停、控制精度高等优点,具体参数如表3。

表3 模拟飞行器参数
3.1.2 室内悬停采集
选择室内模拟飞行高度2 m,光谱间隔10 nm,光谱范围400~720 nm,空间分辨率1 392×1 040像素。此时装置镜头前后视距为36.5 cm(10°),左右视距为52 cm(14°)。图6a为悬停采集的一个光谱立方体,共采集33幅光谱图像。提取光谱立方体中的叶片、茎、地面的光谱,如图6b所示。
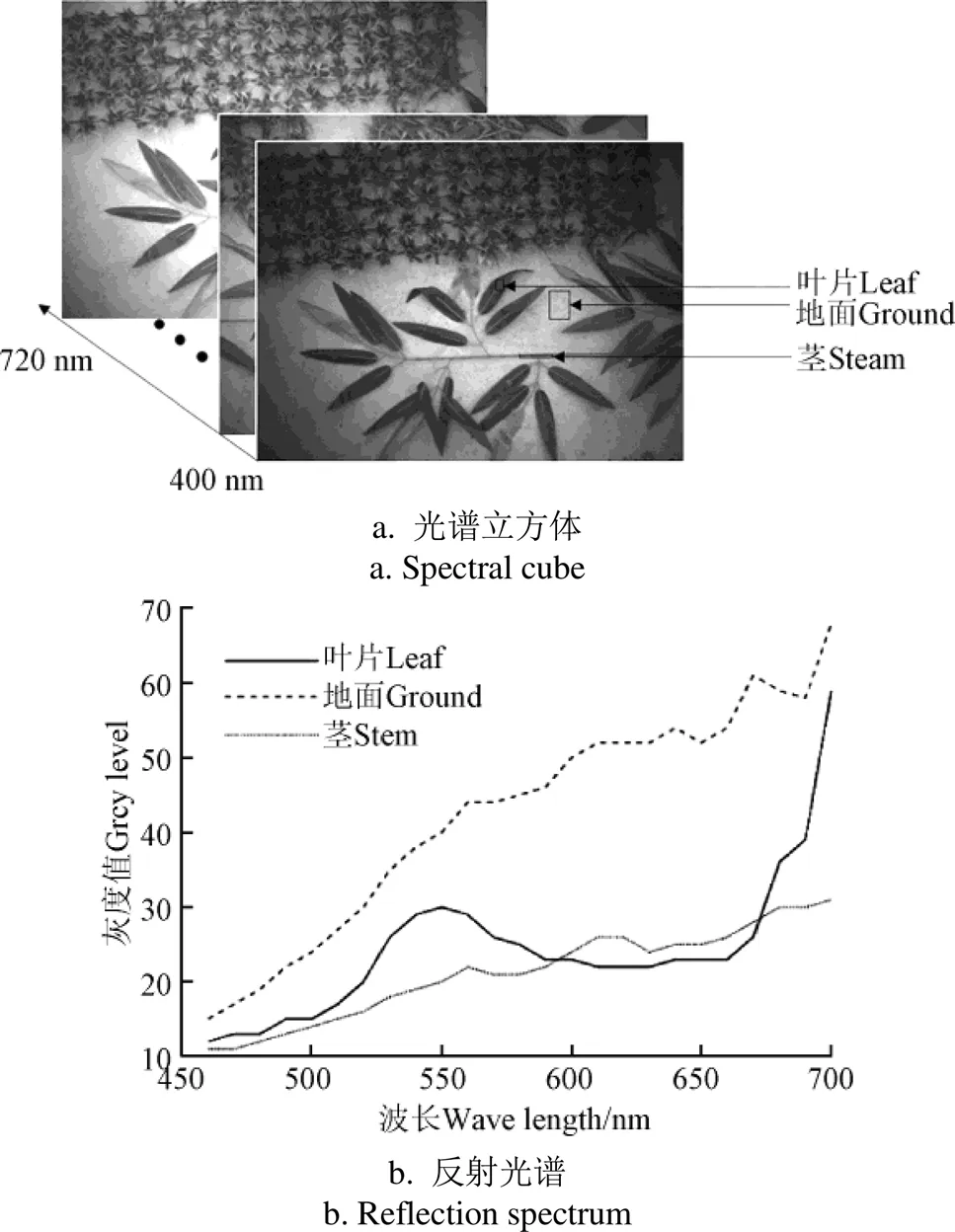
图6 地物光谱立方体及其光谱
从图6a可以看出,装置成像稳定、清晰。从图6b可以看出,所提取的光谱曲线光滑连续。对比图中不同地物的3条光谱曲线,叶片光谱在550 nm附近有明显波峰、680 nm附近有波谷,680~700 nm是红边上升沿,特征准确稳定,且与地面反射光谱差异显著。说明装置在室内理想条件下,图像和光谱质量理想可靠,满足低空遥感需求。
采用Brenner梯度函数对采集光谱图像清晰度进行评估。该函数定义如下:

其中(,)表示图像对应像素点(,)的灰度值,()为图像清晰度计算结果,数值越大清晰度越高。
图7第1列图像为从悬停采集的一个光谱立方体中随机选出的3张光谱图像,从7a到7c分别对应波长450、550、650 nm。第2列为同一视场、相同波段下重新微调镜头焦距,从而由于定焦问题产生的毫米级离焦光谱图像。第3列为同一视场、相同波段下取消模拟飞行器上避震器,导致装置微小震动增大,从而得到的运动模糊光谱图像。通过比较3种情况下的计算结果可看出各图像的清晰程度,表4为计算结果。

注:OI为原始图像;OFI为离焦图像;GBI为运动模糊图像。

表4 图像清晰度计算结果
Brenner函数计算结果显示,各波段原图清晰度均为毫米级离焦图像的10倍左右,为高斯模糊图像的15倍左右,说明原图成像质量高。室内悬停采集试验结果表明,装置可以在无人机悬停模式下进行光谱图像采集,性能稳定、图像清晰度高。
3.1.3 室内定速采集
根据式(1)和(2),设置装置参数与飞行参数。控制装置拍摄帧频为1.34帧/s,曝光时间11.77 ms,波长间隔为30 nm,采用循环拍摄模式。飞行参数为飞行速度5.5 cm/s,飞行高度2 m。相邻2个光谱立方体相同波段图像之间有20%左右的冗余。图8a为拍摄相邻4个光谱立方体中波长为550 nm的4幅光谱图像。基于surf特征点算法对图8a中的4幅光谱图进行拼接,效果如图8b所示。

图8 波长为550 nm的光谱图像拼接
从图8a可以看出,装置在定速运动情况下,可以获得高质量的光谱图像,成像稳定清晰。从图8b可以看出,定速采集的图像通过特征点算法可以实现较好的拼接。
采用峰值信噪比PSNR(dB)定量评价拼接后图像质量,PSNR定义如下:


式中和分别为原始图像横纵方向的总像素量,(,)代表原始图像第行第列的像素值,MAX为图像最高灰度级,MSE为均方差。PSNR越大,图像失真越小,通常要求拼接图像质量≥20 dB。
分别将4幅原图和拼接后相同区域图像作比较,得到PSNR值,分别为24.23,22.84,23.27,23.55 dB。从结果可以看出,拼接后图像的PSNR值均大于22 dB,拼接图像质量较为理想,表明装置在无人机定速飞行模式下工作性能稳定。
综合室内模拟试验,在理想飞行条件下,装置实现了与旋翼无人机2种飞行模式的匹配,更好地满足了旋翼无人机近地遥感的需求。
3.2 室外试验
3.2.1 飞行平台参数
室外试验飞行器采用华南农业大学自组装的四旋翼植保无人机,主控制器使用STM32F427芯片,故障安全协处理器使用STM32F100芯片,飞行控制器采用pixhawk2,参数见表5。

表5 自组装无人机参数
3.2.2 试验结果与分析
根据作物长势和常规植保作业经验,确定试飞高度5 m,光谱间隔10 nm,图像空间分辨率1 392×1 040像素。图9a为搭载装置试飞;图9b为随机抽取的一幅550 nm的光谱图像。图9c是获得的小麦区域反射光谱,该反射光谱能够准确反映小麦在550 nm附近、680~700 nm处的光谱特征。
为了验证小麦区域反射光谱的准确性,采用光纤光谱仪(美国,海洋光学,FLAME-S-VIS-NIR-ES)随机采集视场区域内小麦光谱数据20组,平均并归一化后,与本装置采集的光谱数据归一化值作比较,两者的Pearson相关系数为0.98,表明本文装置得到的结果与商用光谱仪采集的光谱基本一致,说明本文装置采集到的光谱数据可靠准确。图9d为本文装置采集光谱数据的归一化值和海洋光谱仪采集的20条光谱曲线归一化值。

从试验结果可以看出,装置在田间采集的光谱图像成像质量高、光谱稳定可靠,说明在天气状况良好的情况下,装置搭载于旋翼无人机,适于开展田间近地遥感,可得到理想的结果。
4 结 论
为了使光谱成像装置与植保无人机作业需求更加匹配,本文基于多旋翼无人机悬停、定速飞行2种作业模式特点和遥感需求,设计开发了一套液晶光谱成像装置。
1)本装置基于面阵分光原理,以液晶可调滤光器为核心分光器,相对于常规面阵分光设备仅能提供4~6个波段的多光谱图像具有更高光谱分辨间隔,在400~720 nm的光谱范围内,光谱间隔最高可达到2 nm。
2)通过硬件、软件开发,实现了装置采集模块、控制模块和通信模块3部分的协同工作。在此基础上,建立了装置的数据采集方法,保障了光谱图像的可拼接性,实现了装置与无人机悬停和定速飞行2种作业模式的匹配,解决了光栅分光设备无法实现悬停拍摄的问题。
3)装置采用密接耦合光路设计、核心器件同步触发技术,整套装置结构紧凑、抗震性好、稳定度高,更适合植保作业。
4)本文进一步开展了装置性能测试试验。通过室内模拟实验,对悬停采集成像质量、定速飞行拼接图像质量进行评价;通过室外试验,对采集光谱的特征性进行对比分析。结果显示装置在悬停采集和定速飞行采集工作模式下,均可获得清晰、稳定的光谱图像,且光谱平滑连续、特征稳定可靠。
综上,本文设计开发的液晶光谱成像装置在无人机植保作业中具有明显的优势,集2种作业模式于一体,在作业模式选择、光谱工作波段选择上都具有更高的灵活性。本文为旋翼无人机低空遥感提供了一套新方法,有望应用于精准喷施、作物处方图生成等多个领域。
[1] 姬江涛,扈菲菲,贺智涛,等.四旋翼无人机在农田信息获取中的应用[J].农机化研究,2013,35(2):1-4.
Ji Jiangtao, Hu Feifei, He Zhitao, et al. The application of quad-rotor UAV in farmland information acquisition[J]. Agricultural Mechanization Research, 2013, 35(2): 1-4. (in Chinese with English abstract)
[2] 蔡银杰,孙娟,丁晓辉,等. 我国植保无人机发展现状与展望[J]. 世界农药,2018,40(6):15-18,36.
Cai Yingjie, Sun Juan, Ding Xiaohui, et al. Development status and prospect of plant protection unmanned aerial vehicle in China [J]. World Pesticides, 2018, 40(6): 15-18, 36. (in Chinese with English abstract)
[3] 叶海丝,黄育栋. 论植保无人机在现代农业发展中的应用[J].农机化研究,2019,50(10):34.
[4] 张锋. 植保无人机在农田病虫害防治中的应用研究[J]. 农业与技术,2019,39(8):33-34.
[5] 杨亚飞,金濯,祝戴乐,等. 农用植保无人机发展研究现状[J]. 南方论坛,2019,50(9):22,36.
[6] 耿天华. 论农用植保无人机的应用推广[J]. 湖北农机化,2019(5):5.
[7] 王军,吴修文,吴乃刚,等. 农业植保无人机的发展现状与问题思考[J]. 农业开发与装备,2019(2):84-85.
[8] 张海艳,兰玉彬,文晟,等. 植保无人机水稻田间农药喷施的作业效果[J]. 华南农业大学学报,2019,40(1):116-124.
Zhang Haiyan, Lan Yubin, Wen Cheng, et al. Operational effects of unmanned helicopters for pesticide spraying in rice field [J]. Journal of South China Agricultural University, 2019, 40(1): 116-124. (in Chinese with English abstract)
[9] 李继宇,兰玉彬,施叶茵. 旋翼无人机气流特征及大田施药作业研究进展[J]. 农业工程学报,2018,34(12):104-118.
Li Jiyu, Lan Yubin, Shi Yeyin. Research progress on airflow characteristics and field pesticide application system of rotary-wing UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(12): 104-118. (in Chinese with English abstract)
[10] 许真珠,黄莺. 基于无人机技术的水稻精准喷药系统研究[J]. 农机化研究,2019,41(2):238-241,247.
Xu Zhenzhu, Huang Ying. Study on precision spraying system of rice based on unmanned aerial vehicle technology[J]. Agricultural Mechanization Research, 2019, 41(2): 238-241, 247. (in Chinese with English abstract)
[11] 刘雪峰,吕强,何绍兰,等. 柑橘植株冠层氮素和光合色素含量近地遥感估测[J]. 遥感学报,2015,19(6):1007-1018.
Liu Xuefeng, Lü Qiang, He Shaolan, et al. Estimation of nitrogen and pigments content in citrus canopy by low-altitude remote sensing [J]. Journal of Remote Sensing, 2015, 19(6): 1007-1018. (in Chinese with English abstract)
[12] 韩玉杰,丁宁,冯海宽,等. 基于随机森林算法的冬小麦叶片氮含量遥感估算研究[J]. 现代农业科技,2019(13):1-3, 5.
Han Yujie, Ding Ning, Feng Haikuan, et al. Remote sensing estimation of nitrogen content in winter wheat leaves based on random forest algorithm[J]. Modern Agricultural Science and Technology, 2019(13): 1-3, 5. (in Chinese with English abstract)
[13] 郭玉斌. 基于遥感技术的矿山塌陷地质灾害调查的应用研究[J]. 地质灾害,2019(10):141-143.
Guo Yubin. Application of remote sensing technology in survey of mine subsidence geological disasters[J]. Geologic hazard, 2019(10): 141-143. (in Chinese with English abstract)
[14] 郭伟,朱耀辉,王慧芳,等. 基于无人机高光谱影像的冬小麦全蚀病监测模型研究[J]. 农业机械学报,2019:162-169.
Guo Wei, Zhu Yaohui, Wang Huifang, et al. Monitoring model of winter wheat take-all based on UAV hyperspectral imaging[J]. Transactions of The Chinese Society for Agricultural Machinery, 2019: 162-169. (in Chinese with English abstract)
[15] Sankey T, Donager J, Mcvay J, et al. UAV lidar and hyperspectral fusion for forest monitoring in the southwestern USA[J]. Remote Sensing of Environment, 2017, 195: 30-43.
[16] Rango A, Laliberte A, Herrick J E, et al. Unmanned aerial vehicle-based remote sensing for rangeland assessment, monitoring, and management[J]. Journal of Applied Remote Sensing, 2009, 3(1): 1-15.
[17] 刘建刚,赵春江,杨贵军,等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报,2016,32(24):98-106.
Liu Jiangang, Zhao Chunjiang,Yang Guijun, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 98-106. (in Chinese with English abstract)
[18] Huang Huasheng, Deng Jizhong, Lan Yubin, et al. Accurate weed mapping and prescription map generation based on fully convolutional networks using UAV imagery[J]. Sensors, 2018, 18(10) : 1-12.
[19] Zhao Haitao, Song Xiaoyu, Yang Guijun, et al. Monitoring of nitrogen and grain protein content in winter wheat based on sentinel-2A data[J]. Remote Sensing, 2019, 11(14) : 1-25.
[20] Yeom J, Jung J, Chang A, et al. Automated open cotton boll detection for yield estimation using unmanned aircraft vehicle (UAV) data[J]. Remote Sensing, 2018, 10(12) : 1-20.
[21] 刘帆,王传宽,王兴昌. 近地遥感在森林冠层物候动态监测中的应用[J]. 应用生态学报,2018,29(6):1768-1778.
Liu Fan, Wang Chuankuan, Wang Xingchang. Application of near-surface remote sensing in monitoring the dynamics of forest canopy phenology[J]. Chinese Journal of Applied Ecology, 2018, 29(6): 1768-1778. (in Chinese with English abstract)
[22] 涂兵,张晓飞,张国云,等. 递归滤波与KNN的高光谱遥感图像分类方法[J]. 国土资源遥感,2019,31(1):22-32.
Tu Bing, Zhang Xiaofei, Zhang Guoyun, et al. Hyperspectral image classification via recursive filtering and KNN[J]. Remote Sensing for Land & Resources, 2019, 31(1): 22-32. (in Chinese with English abstract)
[23] 张冬英,洪津,汤伟平,等. 基于LCTF调谐的高光谱成像系统设计[J]. 光谱学与光谱分析,2008(10):2455-2458.
Zhang Dongying, Hong Jin, Tang Weiping, et al. Design of hyperspectral imaging system based on LCTF [J]. Spectroscopy and Spectral Analysis, 2008, 28(10): 2455-2458. (in Chinese with English abstract)
[24] 陈生奇,张文君,侯绿,等. 基于LCTF的新型多光谱成像光学系统设计[J]. 光学与光电技术,2016,14(2):82-85.
Chen Shengqi, Zhang Wenjun, Hou Lu, et al. Optical system design of multi-spectral imaging system based on liquid crystal tunable filter[J]. Optics & Optoelectronic Technology, 2016, 14(2): 82-85. (in Chinese with English abstract)
[25] 沈志学. 基于液晶的光谱成像技术及其应用研究[D]. 北京:中国工程物理研究院,2012.
Shen Zhixue. Research on LC-based spectral imaging technology and its applications[D]. Beijing: China Academy of Engineering Physics, 2012. (in Chinese with English abstract)
[26] 黎伟强,倪志平. 高光谱遥感图像波段选择方法研究[J]. 激光杂志,2019,40(6):55-58.
Li Weiqiang, Ni Zhiping. Study on band selection of hyperspectral remote sensing images[J]. Laser Journal, 2019, 40(6): 55-58. (in Chinese with English abstract)
[27] 高军,荆益国. 基于全卷积神经网络的卫星遥感图像云检测方法[J]. 红外技术,2019,41(7):1-9.
Gao Jun, Jing Yiguo. A fully convoluted neural network-based cloud detection method for satellite remote sensing images[J]. Infrared Technology, 2019, 41(7): 1-9. (in Chinese with English abstract)
[28] 赵晓阳,张建,张东彦,等. 低空遥感平台下可见光与多光谱传感器在水稻纹枯病病害评估中的效果对比研究[J]. 光谱学与光谱分析,2019,39(4):1192-1198.
Zhao Xiaoyang, Zhang Jian, Zhang Dongyan, et al. Comparison between the effects of visible light and multispectral sensor based on low-altitude remote sensing platform in the evaluation of rice sheath blight[J]. Spectroscopy and Spectral Analysis, 2019, 39(4): 1192-1198. (in Chinese with English abstract)
[29] 孙刚,黄文江,陈鹏飞,等. 轻小型无人机多光谱遥感技术应用进展[J]. 农业机械学报,2018,49(3):1-17.
Sun Gang, Huang Wenjiang, Chen Pengfei, et al. Advances in UAV-based multispectral remote sensing applications [J]. Transactions of The Chinese Society for Agricultural Machinery, 2018, 49(3): 1-17. (in Chinese with English abstract)
[30] 刘翔,张晓杰,郑翰清,等. 复杂背景中红外多光谱目标检测算法研究[J]. 上海航天,2016,33(4):56-62.
Liu Xiang, Zhang Xiaojie, Zheng Hanqing, et al. Infrared dim and small targets detection for multispectral imagery[J]. Aerospace Shanghai, 2016, 33(4): 56-62. (in Chinese with English abstract)
[31] 卢劲竹. 基于光谱成像技术的植物叶部病害检测研究[D]. 杭州:浙江大学,2016.
Lu Jinzhu. Plant leaves diseases detection using spectral imaging technology[D]. Hangzhou: Zhejiang University, 2016. (in Chinese with English abstract)
[32] 黄耀欢,李中华,朱海涛. 作物胁迫无人机遥感监测研究评述[J]. 地球信息科学学报,2019,21(4):512-523.
Huang Yaohuan, Li Zhonghua, Zhu Haitao. The use of UAV remote sensing technology to identify crop stress: A review[J]. Journal of Geo-information Science, 2019, 21(4): 512-523. (in Chinese with English abstract)
[33] Thomas K A, Alexandra T A, Eirini P X. Novelty detection classifiers in weed mapping: silybum marianum detection on UAV multispectral images[J]. Sensors, 2017, 17(9): 1-12.
[34] 王义坤,韩贵丞,姚波,等. 面阵摆扫型无人机载大视场高光谱成像技术研究[J]. 激光与红外,2019,49(7):876-880.
Wang Yikun, Han Guicheng, Yao Bo, et al. The research on wide-field hyperspectral imaging technology with UAV [J]. Laser & Infrared, 2019, 49(7): 876-880. (in Chinese with English abstract)
Development of near-earth remote sensing spectral imaging device based on multi-rotor UAV
Zhao Jing1, Long Teng1, Lan Yubin1, Long Yongbing1, Li Jiyu2※
(1.,,510642,; 2.,,510642,)
There are two kinds of operation mode of plant protect multi-rotor UAV, hover and fixed-speed flight, so corresponding working modes of spectral remote are needed. However, general-purpose remote sensing equipment couldn’t satisfy the needs. A set of liquid crystal spectral imaging device was designed to meet the requirements of low-altitude spectral remote of multi-rotor UAV based on the principle of two-dimensional optical splitting. Firstly, the hardware and the software of the device were developed to realize the synchronization of three modules: the acquisition module, the control module and the communication module. The acquisition module consists of a16-bit CCD grayscale camera, a color aberration lens, a liquid crystal tunable filters (LCTFs), and a UV filter. The control module consists of a microcomputer controller and a USB connector. The communication module consists of a data transmission device, BEIDOU positioning systems, and the ground workstations. The software was developed to control hardware for working synchronously and analyze data. The functions of software were not only for parameter adjustment before formal capturing, but also for spectral images analysis alone and achieving spectral abstraction. Secondly, the data acquisition method based on the principle of device was studied. The relationship between the flight speed, altitude and capturing parameters of the device was established, which guaranteed the quality of spectral images, the possibility of image mosaics, spectral continuity and stability of the captured spectral images. Thirdly, indoor and outdoor experiments were carried out to test the device performance and data acquisition method. The indoor experiment was performed in the wind tunnel laboratory of South China Agricultural University by a stepper motor equipped. Compared with the millimeter-defocus blur spectral images, and the micro motion blur spectral images, the original images taken indoors were 10 and 15 times clearer respectively. Furthermore, image mosaics could be achieved based on feature point algorithm. The outdoor experiment was carried out in Xinxiang, Henan Province, China, with a Quadrotor UAV equipped. The results showed that the original images taken outdoors had high-quality, and the spatial resolution was up to 1 392×1 040 pixels. The spectra abstracted from original images were stable and reliable. The spectral range was 400-720 nm, and the spectral step was up to 2 nm. Both the comprehensive indoor simulation tests and the outdoor tests showed that the liquid crystal spectral imaging device developed in the paper could obtain qualified spectral images, and showed that the device could match two operating modes of multi-rotor UAV, hover and fixed speed motion. Based on the design of direct coupling optical path, the whole set of device is compact structure, vibrate resistance, high reliability and stability, and suitable for plant protection working. The new method and the device were provided for low-altitude remote sensing of multi-rotor UAV in the paper, which is expected to be applied to precision spraying, crop prescription map generation and other related fields.
unmanned aerial vehicle; remote sensing; hyperspectral technique; liquid crystal spectral imaging device
10.11975/j.issn.1002-6819.2020.03.010
TH74; O433
A
1002-6819(2020)-03-0078-08
赵 静,龙 腾,兰玉彬,龙拥兵,李继宇. 多旋翼无人机近地遥感光谱成像装置研制[J]. 农业工程学报,2020,36(3):78-85.doi:10.11975/j.issn.1002-6819.2020.03.010 http://www.tcsae.org
Zhao Jing, Long Teng, Lan Yubin, Long Yongbing, Li Jiyu. Development of near-earth remote sensing spectral imaging device based on multi-rotor UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(3): 78-85. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.03.010 http://www.tcsae.org
2019-07-24
2019-12-03
国家重点研发计划(2017YFD0701001)
赵 静,博士,副教授,主要研究方向为光谱成像技术及其应用。Email:zhaojsacu@163.com
李继宇,博士,副教授,主要从事农业航空应用技术研究。Email:lijiyuscau@qq.com
中国农业工程学会高级会员:李继宇(E042100037M)