变体飞行器的气动结构对控制系统的影响
2020-04-09窦婧文
杨 博,窦婧文,曹 振
(1.北京航空航天大学 宇航学院,北京 102206;2.北京机电工程总体设计部,北京 100854)
为了满足复杂多样的飞行任务,变体飞行器的概念应时而生。相对于传统飞行器,变体飞行器通过变体来改变构型,从而可以降低高速飞行带来的热流影响,提高航程,改善飞行性能[1-3]。但构型改变会导致气动布局变化,所以变体飞行器的动力学系统是一个依赖于外形结构的复杂参变系统。相较于传统飞行器,其动力学建模与控制系统的设计都面临新的挑战,是当下航空航天领域的研究热点[4]。
文献[5]分析了Z型翼飞行器在不同飞行模式下的气动特性和期望数学模型,设计了控制器以保证变体过程的飞行稳定性。文献[6]利用多体动力学建模方法对MAS项目的折叠翼飞行器和滑动蒙皮飞行器建立数学模型,并研究了非线性飞行控制策略。文献[7-8]针对不同的变体过程,提出相应的平滑切换线性变参数控制器设计方法,使对应的飞行系统具有良好的稳定性和鲁棒性。以上研究均针对变体过程设计了飞行控制系统,但对于气动结构对控制系统设计的影响未展开针对性的研究。
本文针对一种变体飞行器,建立了多刚体动力学模型,研究了气动参数的变化规律以及结构变化对飞行品质产生的影响,最后通过仿真校验该方法的正确性。
1 变体飞行器动力学模型
1.1 系统动力学模型
研究对象为如图1所示的折叠翼导弹。弹身为扁平锥状外形,两侧布置扇形弹翼,可沿翼面与弹身连接处的转轴进行折叠;3个空气舵分别安装于飞行器尾部两侧及上端,变化范围为-30°~+30°,可以对飞行器的3个通道进行姿态稳定控制。惯性坐标系O1x1y1z1、本体坐标系Oxyz的定义分别如图1所示,其中弹体坐标系原点固连在弹翼完全展开时全弹质心处。

图1 变体飞行器模型示意图
定义弹翼与弹身在同一横向水平面内为完全展开状态,折叠角τ=0°;翼面向上翻折至与弹身紧贴为完全收拢状态,折叠角τ=135°。弹翼可在完全展开与完全收拢及其之间的状态连续对称变化。该变体飞行器的其他构型参数如表1所示。表中,m为弹身质量;ml,mr分别为左、右弹翼质量;Ix,Iy,Iz分别为x,y,z轴转动惯量;b为横向最大翼展;l为弹身纵向长度。
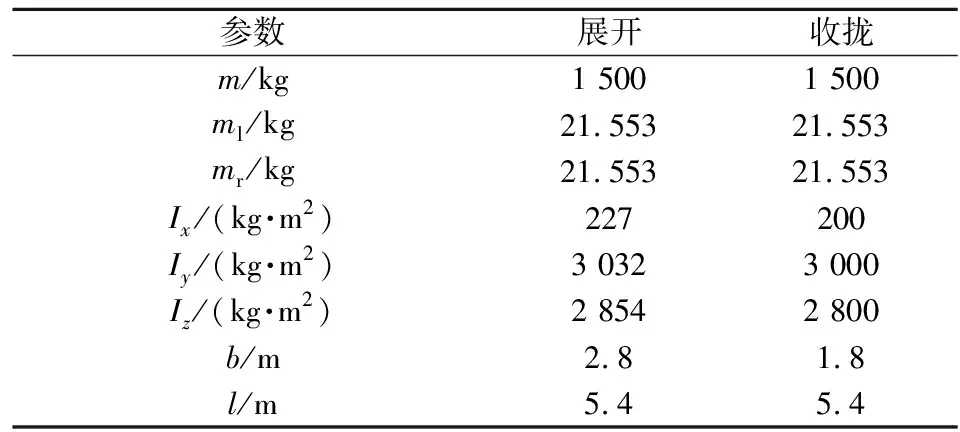
表1 变体飞行器构型参数
为了便于建模,将该变体飞行器的弹身和2个弹翼视为刚体。弹翼沿转轴进行折叠时,该飞行器系统可以看作一个典型的多刚体系统[5]。弹翼质量远远小于弹身质量,在建模过程中忽略全弹质心的移动,系统动力学方程为
(1)
式中:v为飞行速度;ω为转动角速度;t为时间;I为转动惯量;S为飞行器对弹体系原点的静矩;F,M分别为飞行器所受外力与外力矩;下标i代表r,l,即左、右折叠翼。将式(1)右边展开,有:
(2)


(3)
式中:(·)x,(·)y,(·)z分别为对应物理量在弹体系下的3个分量。
1.2 面向控制的建模
建立姿态控制系统模型时有如下假设:
①忽略地球引力和地球自转角速度;
②弹翼的折叠过程受到伺服机构等物理限制,所考虑的变形为弹翼沿转轴以0.087 rad/s的速度匀速对称折叠;
③所研究对象的变体过程时间较短,认为飞行器在飞行过程中所经历的只是小角度摄动,初始飞行速度大小为v0。
1.2.1 控制模型
构建多刚体动力学建模方法下的变体飞行器误差模型:

(4)
状态变量:X(t)=(ΔαΔβΔωxΔωyΔωz)T,控制输入:u(t)=(Δδz1Δδz2Δδy)T。式中:α,β分别表示攻角和侧滑角。
1.2.2 俯仰通道
俯仰通道误差模型:
(5)
整理得到:
(6)
式中:

1.2.3 偏航、滚转通道
计算偏航及滚转通道的误差模型。对于偏航通道,计算整理可以得到:
(7)
式中:
同样地,通过计算可以认为B3≈0,B4≈B41=1;且B(·)与飞行器当前时刻的气动布局和外部流场有关,折叠动态过程的影响较小可忽略不计,即飞行侧滑角的响应同样不受弹翼动态变化过程的影响。
由式(3)可以看出,飞行器滚转通道和偏航通道存在耦合影响,耦合项是由气动结构引起的,与飞行速度有直接关系[9],因此在控制器的设计前仍需要对折叠过程中的阻力特性进行分析。此外,耦合作用对控制器的设计还提出了相应的要求:在控制攻角和侧滑角达到指令时应使不同气动舵的变化过程尽量同步且平缓,以减弱通道间的扰动。
2 气动特性分析
以弹翼完全展开和完全收拢状态的气动布局为参考,比较变体飞行器的气动特性。计算条件为Ma=8.0,H=40 km。
2.1 升力特性
飞行器的升力及升力线斜率的大小反映了飞行器的机动能力[9]。不同折叠角τ时升力系数CL随攻角α及展弦比η的变化情况如图2所示。
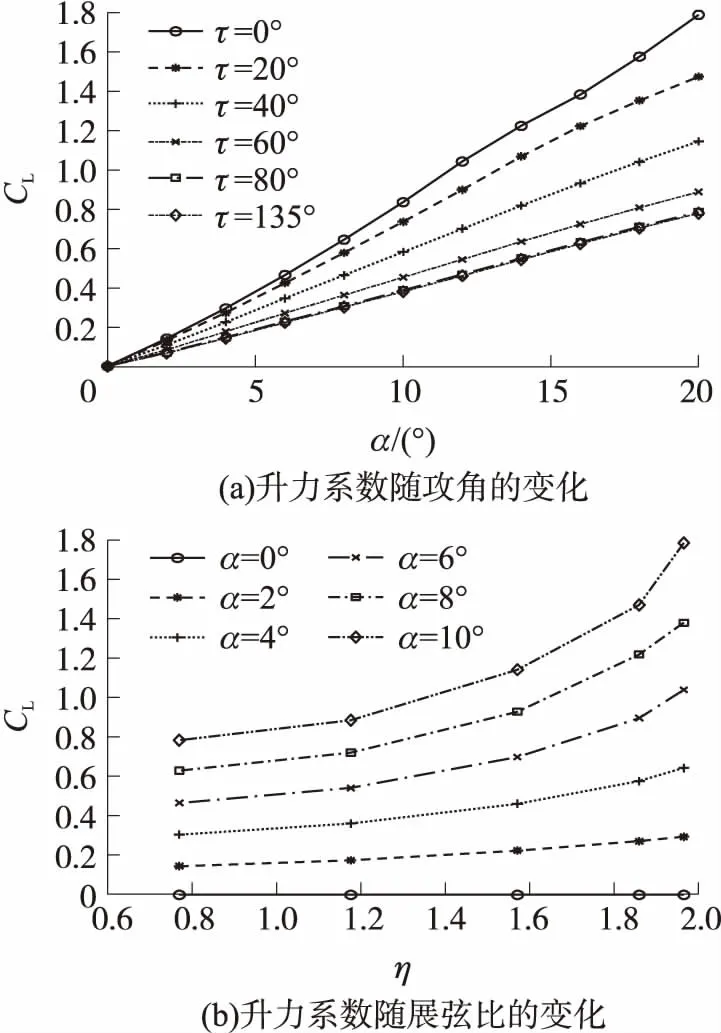
图2 变体飞行器的升力系数变化
在一定攻角范围内,折叠角越小,展弦比越大,相同飞行条件下的升力系数及其斜率就越大。弹翼完全展开与完全收拢时相比,升力线斜率增大了128.61%,即其他条件相同时,升力系数增大128.61%。由此可见,弹翼折叠可以较大幅度地提高导弹的机动能力。对于俯仰通道来讲,对式(6)做拉式变换:
(8)
2.2 升阻比特性
虽然小折叠角的弹翼具有优越的升力特性,可以用于改善飞行器的瞬时机动性,但大的展弦比会导致较大的诱导阻力,其阻力特性并不理想[10]。图3、图4分别给出了变体飞行器阻力系数CD及升阻比CL/CD随攻角的变化情况。
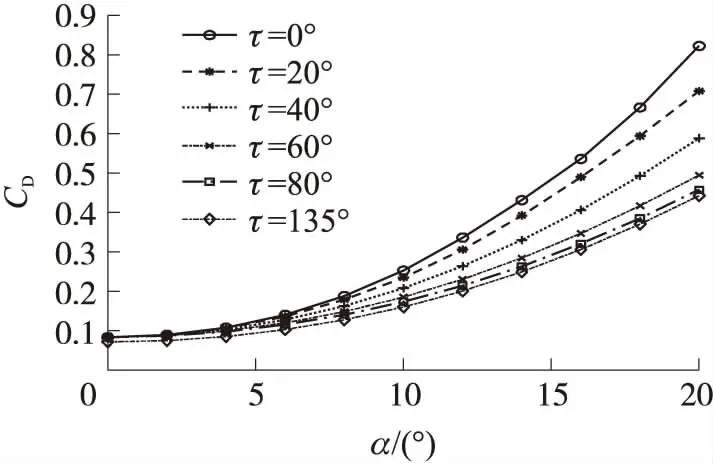
图3 变体飞行器的阻力系数变化
由图3可以看出,弹翼完全收拢时的构型具有更优的阻力特性,尤其是在攻角较大,如α=16°时,弹翼完全展开时对应的阻力系数比完全收拢时增大了74.76%。
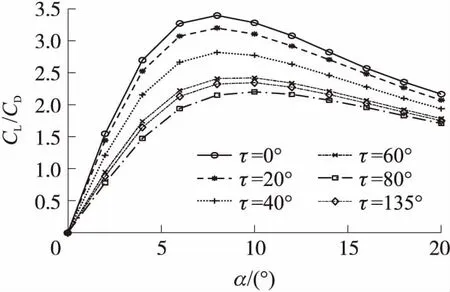
图4 变体飞行器升阻比变化
由图4可见,不同折叠角对应的升阻比特性随攻角的变化趋势相近,均在攻角α=8°附近达到最大值;而弹翼由完全展开到完全收拢,相应的升阻比下降约36%。在机动过载要求不太高的飞行阶段,如滑翔段,可以通过改变折叠角来调节升阻比,降低有限过载条件下的阻力,进而增大飞行器的航程。
2.3 静稳定性

图5 纵向静稳定系数变化

图6 力矩系数导数变化
3 控制器设计
对于变体飞行器,现有的控制系统设计大多直接在多刚体模型下设计或改进线性参变控制器[7,11],而对多体模型与传统单刚体模型的控制性能的对比鲜有研究。因此,首先考虑将线性系统理论和单刚体假设下的飞行器控制系统设计思路用于变体飞行器飞行控制系统的设计和分析。具体的步骤如下:
①选取几个不同折叠角作为设计特征点,暂选取τ=0°,20°,40°,60°,80°,与气动数据计算特征点相同;
②建立单刚体的线性控制系统模型;
③设计鲁棒控制器,为不同折叠角下的线性模型选取合适的控制参数;
④将控制器代入多刚体模型中,仿真校验其有效性。
3.1 线性控制器
首先针对单刚体模型,在间隔一定变形角度的情况下设计具有模型普适性的稳定控制律。现采用线性二次型控制器,将二次型性能指标函数取为以下形式:
(9)
式中:Q为半正定5×5维对称矩阵;R为正定3×3维对称矩阵,其选取的适当与否直接决定着最终的控制效果。为了简化寻优模型,减少运算量,拟固定Q矩阵元素,以R矩阵的对角线元素作为寻优变量。由先验知识可知,R矩阵对角线元素的变化区间非常大,直接以其作为寻优变量,会严重影响参数寻优速度和精度。为此,对R矩阵参数寻优时选择对角线元素的以10为底的指数作为寻优变量。即
此时固定Q矩阵为单位阵,R矩阵对角线元素相等,则有:
(10)
寻优变量中实际只有R矩阵的一个参数为变量,需要进行优化,由此变为单变量寻优。
采用遗传算法对加权阵进行辨识,寻优目标为状态响应速度最快。确定寻优范围时,首先要保证系统满足给定的误差要求,然后考虑状态响应速度最快的R矩阵参数取值。在仿真试验中,状态响应速度最快的R矩阵参数取值全部在-2~0之间。为了保证算法的准确性,可以选择R矩阵参数寻优范围为-3~1。
3.2 系统仿真校验
3.2.1 仿真条件
仿真过程模拟变体飞行器两侧弹翼由完全展开状态折叠至完全收拢状态,角度和角速度状态量的收敛精度分别为0.1°和1.75×10-4rad/s。根据小扰动前提和研究背景,选取初始配平点:Ma=12.57,H=43 180 m,α=9.27°。
初始状态:ΔX=(0.172 0.172 0.003 0.003 0.003)T。
3.2.2 仿真结果
飞行器的变体闭环仿真结果(以纵向为例)如图7、图8所示。
图7 纵向状态闭环仿真响应情况

图8 纵向执行机构闭环仿真响应情况
在多刚体模型下的变体过程中,各运动状态均快速收敛。攻角、侧滑角收敛精度为0.1°与0.01°,角速度状态量收敛精度分别为1.75×10-6rad/s,1.75×10-6rad/s和1.75×10-4rad/s,满足所提出的技术指标。
为了验证控制律在不同模型下的适用性,改变速度、高度等飞行条件,对控制系统进行仿真,其余初始状态等条件与3.2.1中条件相同,系统的闭环仿真结果如图9所示。仿真结果表明,攻角在各个飞行条件下均快速收敛,且收敛精度满足技术指标。
图9 不同飞行条件下的攻角状态仿真结果
对比传统单刚体假设下的飞行器仿真结果,可以看出:
①变体飞行器的攻角收敛误差并不趋于0,而是在不同的折叠角度下趋于不同的常值。这是因为变体飞行器模型(4)中存在矩阵C,攻角通道会产生常值累积误差。由于该部分数值较小,不会对系统的稳定性或收敛精度产生影响。
②折叠过程中系统状态会有突变,且状态突变与控制器参数变化在同一时刻发生。这是因为变体会造成系统矩阵的变化,导致在不同折叠角对应的系统模型切换时出现多处不期望的状态突变。因此,针对变体过程需要采用基于参数特征结构或基于模型依赖平均驻留时间等方法来设计平滑的切换控制律,确保系统的全局一致渐进稳定性和鲁棒性。
3.2.3 稳定性分析
变体飞行器系统的闭环特征值如表2所示。不同折叠角度下系统的闭环特征值均具有负实部,故在该控制器下变体过程是渐进稳定的。由于弹翼的收拢,飞行器的升力线斜率在不断减小,俯仰通道的系统极点从左半平面逐渐向虚轴移动,系统的快速性减弱。

表2 变体过程中闭环系统特征值变化情况
3.2.4 气动参数不确定性分析
由于气动数据仿真计算时采用了准定常假设,参数的标称值与实际情况相比会有一定的偏差,即模型存在不确定性。这种不确定性可采用参数摄动来表示,设定各气动参数变化的摄动上限为计算值的30%,通过计算最坏情况增益,采用不确定参数灵敏度来衡量各参数摄动对系统的影响。不确定参数灵敏度越大,则该参数摄动对系统的影响越大[12]。选取飞行器速度Ma=12.57,高度H=43 180 m的某一个特征点对系统进行不确定性分析,结果表明,在各个频段灵敏度较大的参数均为力矩系数项,且远远大于气动力系数的灵敏度。
为了验证控制系统的鲁棒性,考虑气动力矩参数有30%摄动,其他仿真条件同3.2.1中条件,飞行器变体过程的闭环仿真结果如图10所示。从仿真结果易于看出,考虑气动参数的不确定性之后,系统状态收敛速度减缓,但整个过程中的系统状态均在允许的精度范围内做小幅变化。所以该控制律对于气动参数的不确定性来说具有较好的鲁棒性。
3.3 多刚体模型控制问题
对于多刚体模型,在不施加控制时系统矩阵的特征值变化如表3所示。变体过程中气动结构的变化改变了系统自身的稳定性,使得不同折叠角下的各通道稳定性不尽相同;随着折叠角的增大,开环系统的稳定性越差。
图10 考虑气动参数不确定性的系统闭环仿真结果

表3 变体过程中开环系统特征值变化情况
若想按照单刚体模型的思路来继续改进线性控制器,达到减小纵向状态误差累积和平滑过渡过程的目的,必须使变体过程与非变体过程的系统矩阵尽可能地统一,体现在E2(τ),F2(τ),C(τ)矩阵应尽可能接近于零矩阵。在此要求下,需改变弹翼质心的相对位置,使其与弹体坐标系原点尽可能接近。在保证弹翼面积和展弦比的情况下,需对弹翼的外形尺寸进行改动,即减小翼展,增大翼面沿转轴方向的长度。
对于已设计完成的飞行器,可针对非线性模型来设计多通道耦合的控制器,实现飞行过程中的姿态控制。
4 结论
针对变体飞行器变体飞行过程中的控制系统设计问题,得到如下结论:
①飞行器的变体过程具有强耦合性,设计控制器时需要结合气动特性来合理选择控制参数,使得各状态收敛时间较为同步,减少通道间的相互扰动。
②变体飞行器的气动特性变化剧烈,变体可以有效改变升阻比特性,最佳升阻比可以改变36%。合理选择折叠角度,可以得到不同的升阻特性组合方案,满足飞行器多任务飞行需求。在控制器设计时首先需要满足飞行器全通道的稳定;其次系统状态响应也与气动特性紧密相关,折叠角越小,升力线斜率越大,纵向状态的快速性越好,变体可以使系统的快速性提高128.61%。
③与传统飞行器相比,变体飞行器线性控制系统需要设计参变的平滑切换控制器以保证状态的平稳过渡;或通过设计多通道耦合的非线性控制系统来对飞行器进行控制。
