巡检无人机应急充电电源管理系统设计
2020-04-07林火煅李文院缪希仁
林火煅,陈 杰,沈 滨,孙 嫱,李文院,缪希仁
(1.国网福建省电力有限公司漳州供电公司,福建 漳州 363000; 2.福州大学电气工程与自动化学院,福建 福州 350108)
0 引言
电网的规模在不断扩大,传统的人工巡检需要耗费大量的时间、人力和财力,这种方式成本高且效率低.为克服传统人工巡检的不足,鉴于无人机技术的迅速发展与应用,电力企业开始采用无人机沿线巡检[1-5].无人机巡检具有迅速快捷、不受地形环境限制、工作效率高、机动灵活等优点[6].但无人机巡检的续航能力较差,一般小型无人机电池续航能力为15~30 min[7],且日常不能满电保存.在发生自然灾害(如台风、暴雨等)后的电力线路巡检中,需要无人机立即出动,且进行高强度、高频次巡检,但现有的无人机充电电源管理系统充电装置采用一对一方式,充满时间为3~5 h,且无法在外出巡检中进行应急充电,难以满足灾后无人机应急充电的需求.
目前,应急充电技术主要的应用场合多为电动车系统、数码电子装置等系统,电池管理的概念常用于大型的电动车电池、大容量的储能系统电池管理,无人机的电池应急充电和电源管理系统目前关注较少.樊海军等[8]设计了一种基于XC866单片机控制的锂电池组管理系统,实现充放电控制和均衡控制,但该系统功能单一,不能应对紧急情况下对220 V负载充电的需求.王硕等[9]设计一种基于CAN总线的锂离子电池组充电管理系统,采用克服死区的PI增量算法,实现了电池单体状态检测,提高了控制精度,但其充电时间>4 h,无法满足灾后无人机应急巡检需求.文[10]中提出利用TCP/IP技术建立的电源管理系统实现无人或少人值守,减少维护人员的工作量,提高维护质量.
针对无人机灾后等应急抢险等工程实际需要,克服现有充电电源管理系统的局限性,本研究提出基于整流逆变技术的巡检无人机车载充电电源管理系统,采用交错并联PFC设计和TCP/IP技术,实现对不同厂家、不同型号无人机(锂电池)的应急充电,对灾备行进途中或灾备现场交流负载的应急充电,对充电装置的状态监测及远程管理.
1 巡检无人机车载应急充电电源管理系统原理
1.1 系统组成
巡检无人机车载应急充电电源管理系统主要是由汽油发电机、电源供应器(铅酸蓄电池组)、整流模块、逆变模块、充电模块、无人机负载锂电池电压智能充电管理模块、手机APP组成.系统充电装置固定于车载平台中,在日常检修、奔赴应急抢险途中和到达目的地后进行应急充电.该系统的主要功能是通过整流、逆变及充电装置进行能量转换,主要分为灾备后行进途中的充电功能和到达目的地后的现场充电功能.无人机应急充电电源管理系统结构组成如图1所示.
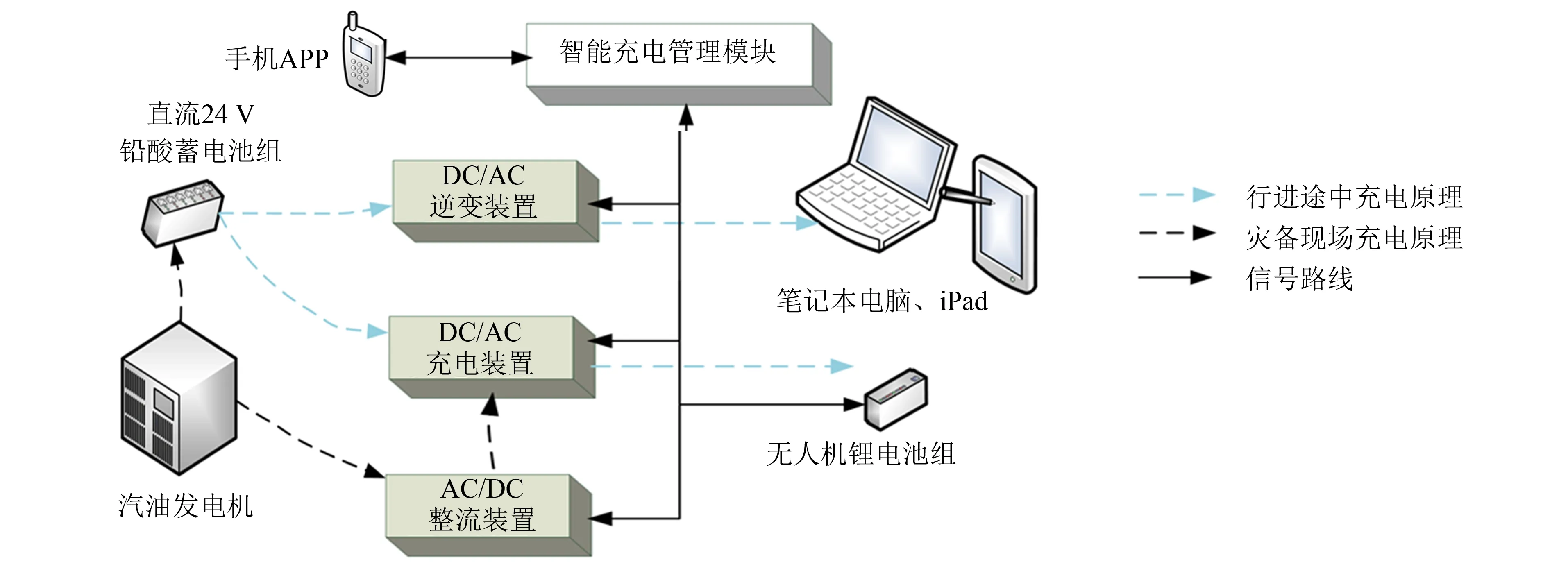
图1 无人机应急充电电源管理系统结构组成Fig.1 Structure composition of emergency charging power management system for UAV
行进途中的充电功能: 在灾备应急车行进途中对无人机电池进行充电,将已充电的铅酸蓄电池组的24 V直流电通过DC/DC充电装置直接给无人机锂电池组充电,同时也可利用DC/AC逆变装置逆变成220 V交流电,供车辆行进过程中灾备应急人员携带的需220 V交流电的设备(如笔记本电脑)进行充电.
灾备现场的充电功能: 在灾备现场利用汽油发电机通过AC/DC整流装置,将220 V交流电整流为24 V直流电给DC/DC充电装置提供电源,用于无人机锂电池组充电.同时AC/DC整流装置也可对铅酸蓄电池组进行充电.
对比现有的无人机电源管理系统,本研究设计的巡检无人机车载应急充电电源管理系统具有明显的优越性,如表1所示.在充电速度上,巡检无人机车载应急充电电源管理系统有很大的提升;在安全性上,通过温度监控以及远程监控,提高充电安全;在应急需求方面,通过一对多充电配合快速充电满足应急需求;在日常维护方面,对电池进行充放电管理,加上远程操控,实现提高安全性的同时降低人力成本.在充电场景方面,巡检无人机车载应急充电电源管理系统固定在车载平台,可实现行进途中以及外出现场应急充电,从而更好地满足灾后无人机巡检需求.

表1 巡检无人机车载应急充电电源管理系统与现有的无人机电源管理系统对比
1.2 AC/DC整流装置原理
无人机充电电源柜常放置在汽车上,故电源的抗震性、密闭性、温度范围等都是要考虑的内容.其次该充电电源管理系统工作环境常在户外,因此需要电源具备工作效率高、电网谐波低、输入输出稳定、体积小、输出功率等级相对大等特点.为克服蓄电池充电时,蓄电池两端电压随电池电量而变化,本设计的AC/DC整流装置还具有输出电压范围宽的特点.AC/DC整流装置的整体设计结构如图2所示.
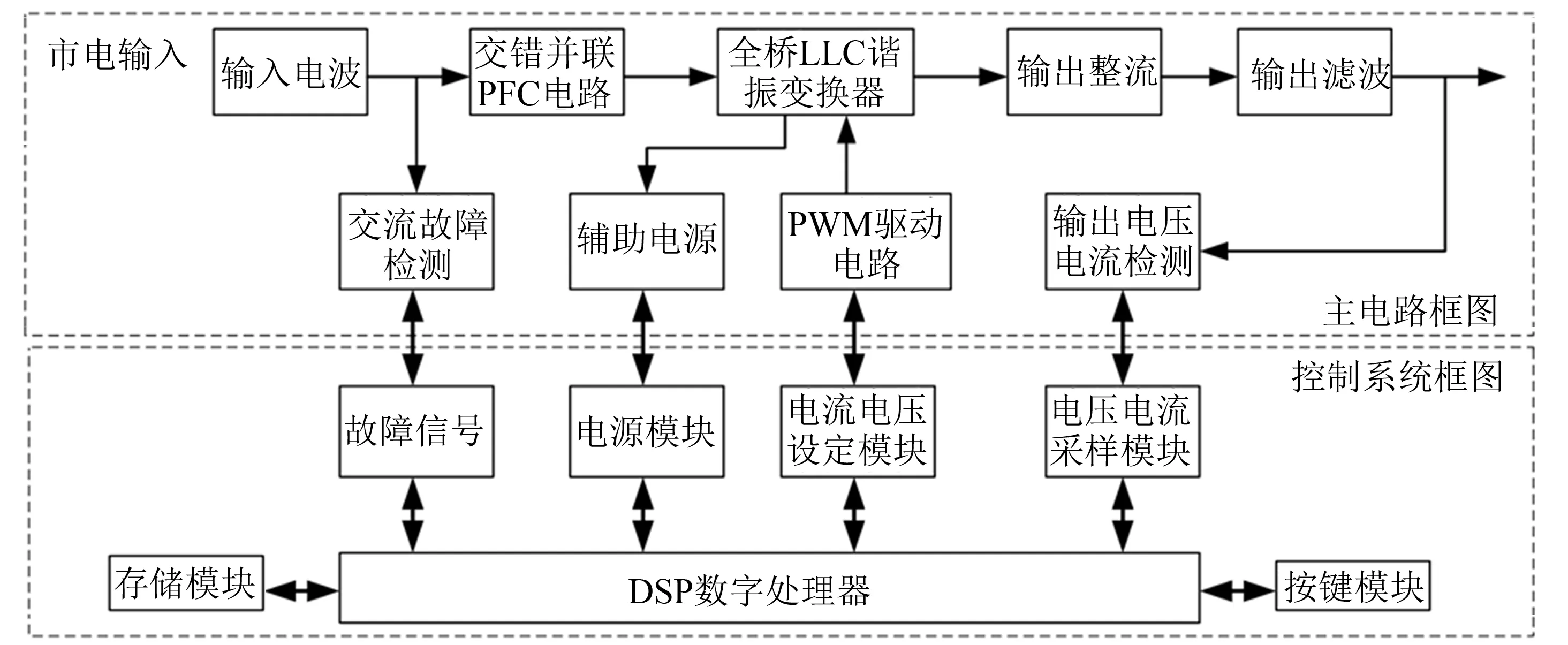
图2 AC/DC 整流装置整体结构图Fig.2 Overall structure diagram of AC/DC rectifier
1.3 DC/AC逆变装置原理
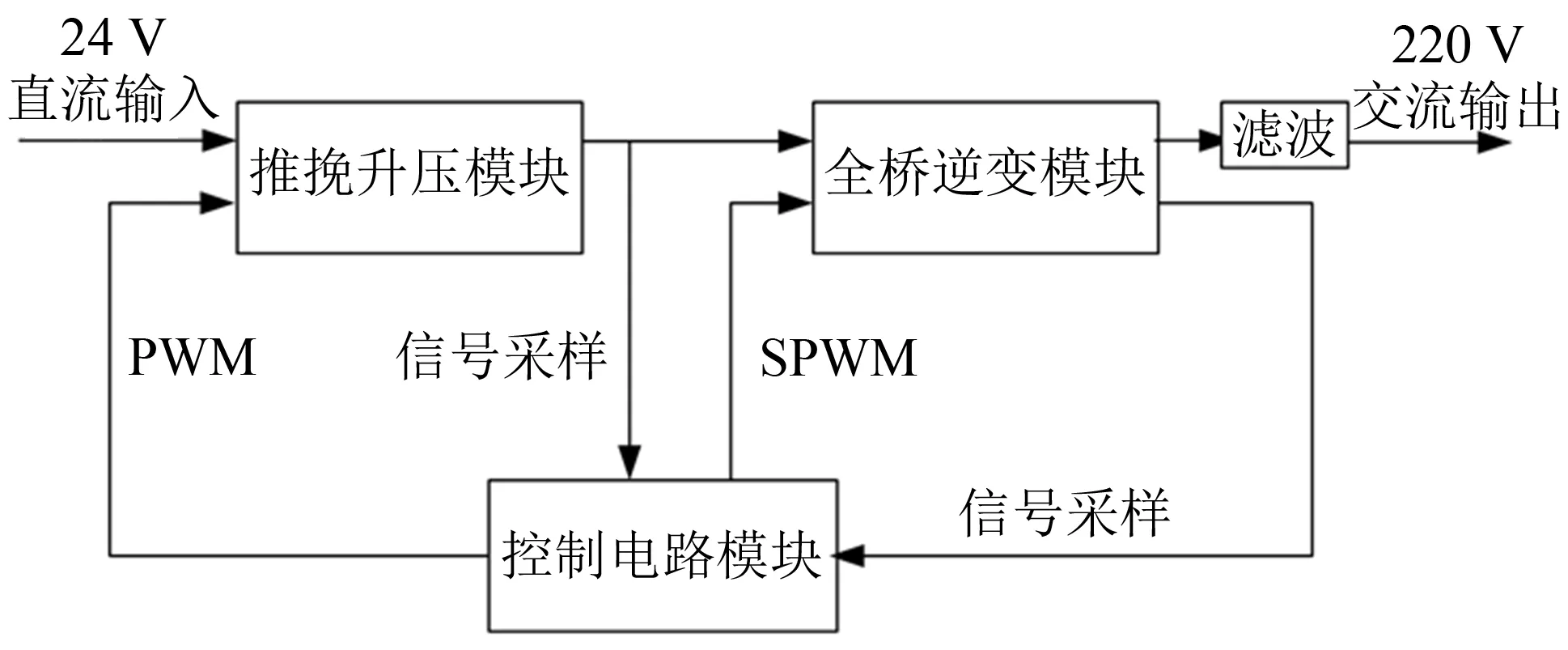
图3 DC/AC 逆变装置结构图Fig.3 Structure diagram of DC/AC inverter
DC/AC逆变装置的功能是将车载携带的铅酸蓄电池组输出的24 V直流电转化为220 V交流电,供给笔记本电脑等交流负载.DC/AC逆变装置主要是由四部分组成,如图3所示.铅酸蓄电池组所产生的24 V直流电,进入推挽升压电路,通过PWM控制,使其输出直流高压.将直流高压送后级的全桥逆变电路,从而将其转变为220 V 50 Hz交流电.通过LC滤波器可将消去全桥逆变电路输出电压中夹带的高次谐波,从而便于交流负载使用.
1.4 智能充电管理模块装置原理
充电装置在能量转换模块的基础上,增加了智能充电管理模块.目前常用的无人机负载锂电池规格一般为3、4、6 s.不同厂家或者不同型号的无人机,对充电适配器的充电电压要求不一样,为了实现同一充电装置对不同无人机的充电,设计的充电装置具有根据实际的无人机锂电池特性,可自动调整输出电压的特点.
智能充电管理模块通过识别无人机电池的平衡头,从而识别对应型号的电池,选择对应的充电参数,对电池进行均衡充电.如3 s的电池是由3个3.7 V电池串联构成,满电时电池对外呈现13 V左右,每节电池4.2 V.均衡充电就是将交流电变压、整流得到13 V的直流电,利用3个电解电容、均压电阻对13 V分压,每个电容上就得到了4.33 V,再用三极管搭建一个闭环电路,从而控制充电的开关以及电流大小,实现每节电池均衡充电.此外,智能充电管理模块通过TCP/IP通讯技术与手机APP实现数据的远程传输,从而达到远程监控管理.
2 AC/DC整流装置
AC/DC整流模块主要功能是将车载汽油发电机产生的不稳定电压的交流电整流为幅值为24 V的直流电,供给DC/DC充电装置,用于无人机锂电池组充电.同时AC/DC整流装置也可对铅酸蓄电池组进行充电.
2.1 AC/DC整流装置设计
2.1.1硬件设计
硬件部分主要由输入滤波、交错并联PFC、全桥LLC谐振变换器、输出整流、输出滤波、数字控制、辅助电源、驱动模块、采样模块所组成.根据能量转换原理,又可分为两级,如图4所示.
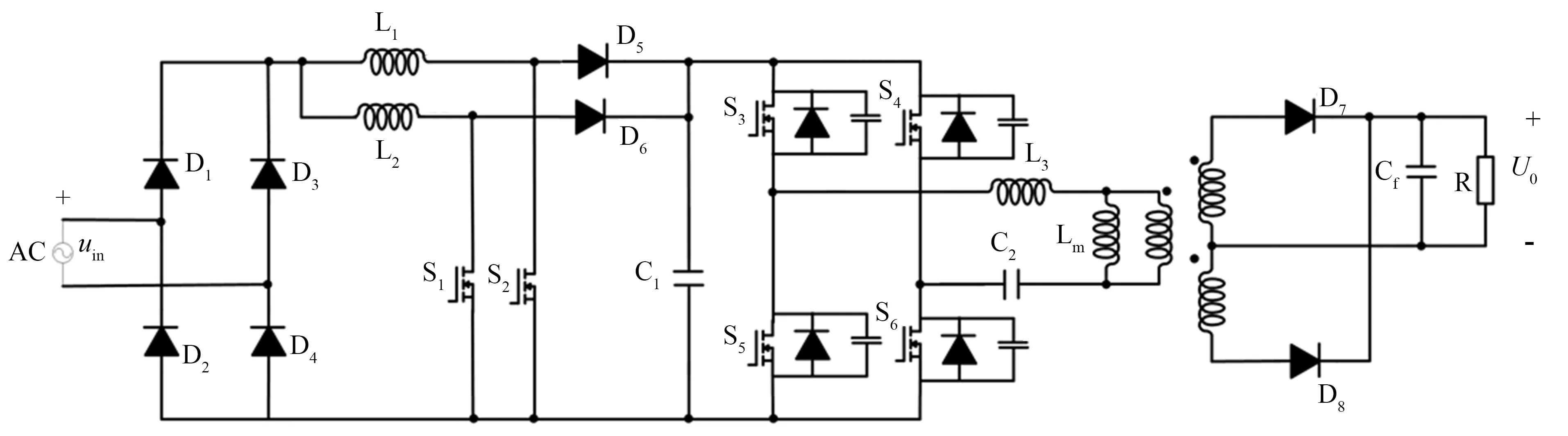
图4 AC/DC变换电路主电路Fig.4 Main circuit of AC/DC converter circuit
前级 AC/DC 采用交错并联Boost PFC整流技术,使整个装置能够在增大功率的同时增大功率密度,且具有较小的电流纹波.后级 DC/DC 采用全桥LLC谐振变换器,使其不仅能够实现原边功率开关管全负载范围内的ZVS开通,也能实现副边整流二极管的ZCS关断,同时还具备宽电压输出,提高了充电设备的整机效率[11].
在交错并联PFC电路中,S1和S2开关的导通占空比相同,其中S2的驱动波形滞后S1半个开关周期.因此,虽然单个BOOST电路的电感电流是断续的,但合成后的PFC变换器的输入电流却是连续的,由此既保留了PFC电路中开关管的零电流开通以及输入功率因数接近于1的特性,也使整个电路呈现CCM模式,每一路开关器件通过的电流仅为输入电流的一部分,多个开关管错时分担输入电流降低了开关管的容量要求.同时PFC电路中的两个电感交错工作,因此两路电感电流叠加时纹波相消,从而减小输入电流纹波.相比于传统PFC电路,交错并联PFC电路提高了输入电流纹波频率,减小输入电流纹波幅值,有效降低了输入电流的高频谐波含量,降低了滤波器的设计难度.
2.1.2控制设计
控制部分设计对应分为两个部分,前级交错并联PFC控制采用数字控制芯片TMS320F28033型DSP,实现电压电流检测、控制、保护等功能.后级全桥LLC谐振变换器控制采用TMS320F28035 型DSP芯片,从而实现输出电压的宽范围调节以及较低纹波的直流电压.DSP的处理信号速度足够快,可以使整个充电设备控制灵活,实时性高,从而使整个充电电源管理系统的稳定性能提高.

图5 两级PFC技术框图Fig.5 Two-stage PFC technical block diagram
AC/DC整流装置设计的难点之一是交错并联PFC控制.单级PFC变换结构存在输出电压范围小的不足,且功率因素、谐波、效率等都难以满足设计要求,故采用具有PFC功率因素校正技术的两级变换器结构,达到AC/DC 整流装置高功率因数、低谐波的效果.后级DC/DC充电装置将PFC母线直流电通过各种不同的拓扑转变成交流电,再通过变压器、整流电路将其转换成直流电,从而实现输出电压的宽范围调节以及低纹波的直流电压.两级PFC技术框图如图5所示.
2.2 AC/DC整流装置实验结果分析
测试条件为220 V交流输入,满载输出,实验结果如图6所示.系统设计要求最大输出功率: 1.6 kW,输出直流电压 24 V.图6(a)和图6(b)分别为输出电压启动波形和输出电压稳态波形.从图6(a)可以看出整流设备启动时,电压过冲幅值较小,且能快速到达额定输出值.图6(b)表明输出电压稳态值约为23.3 V,图6(c)所示为输出电压纹波,从图中可以看出纹波峰-峰值为34.2 mV,说明电压波动范围较小,输出直流电质量较高,基本满足设计指标.图6(d)为整流装置的最终实物图.

图6 AC/DC整流装置实验结果图Fig.6 Experimental results of AC/DC rectifier
3 DC/AC逆变装置
设计的充电电源管理系统的DC/AC逆变装置为用单片机控制的正弦波输出逆变电源,以车载蓄电池组输出的24 V直流电作为输入,输出220 V的正弦波交流电,以满足在行车途中笔记本等交流负载的供电需求.
3.1 DC/AC逆变装置设计
逆变装置主电路采用前后级隔离设计,如图7所示.前级为推挽升压电路,通过高频变压器升压,从而实现前后级的隔离.控制电路采用UC2846芯片,利用变压器进行采样,从而实现电压闭环控制.后级为全桥逆变电路,采用单极性SPWM调制方式,由单片机PIC18F2331控制驱动电路对逆变桥的4个开关管进行正弦脉宽调制,直流电压经过逆变电路输出后,最终在负载上得到指定频率与幅值的正弦波.在保护方面,通过电压,电流检测装置采集输出信号,从而实现输入过/欠压保护、短路保护等多重保护,增强了该电源的可靠性和安全性.
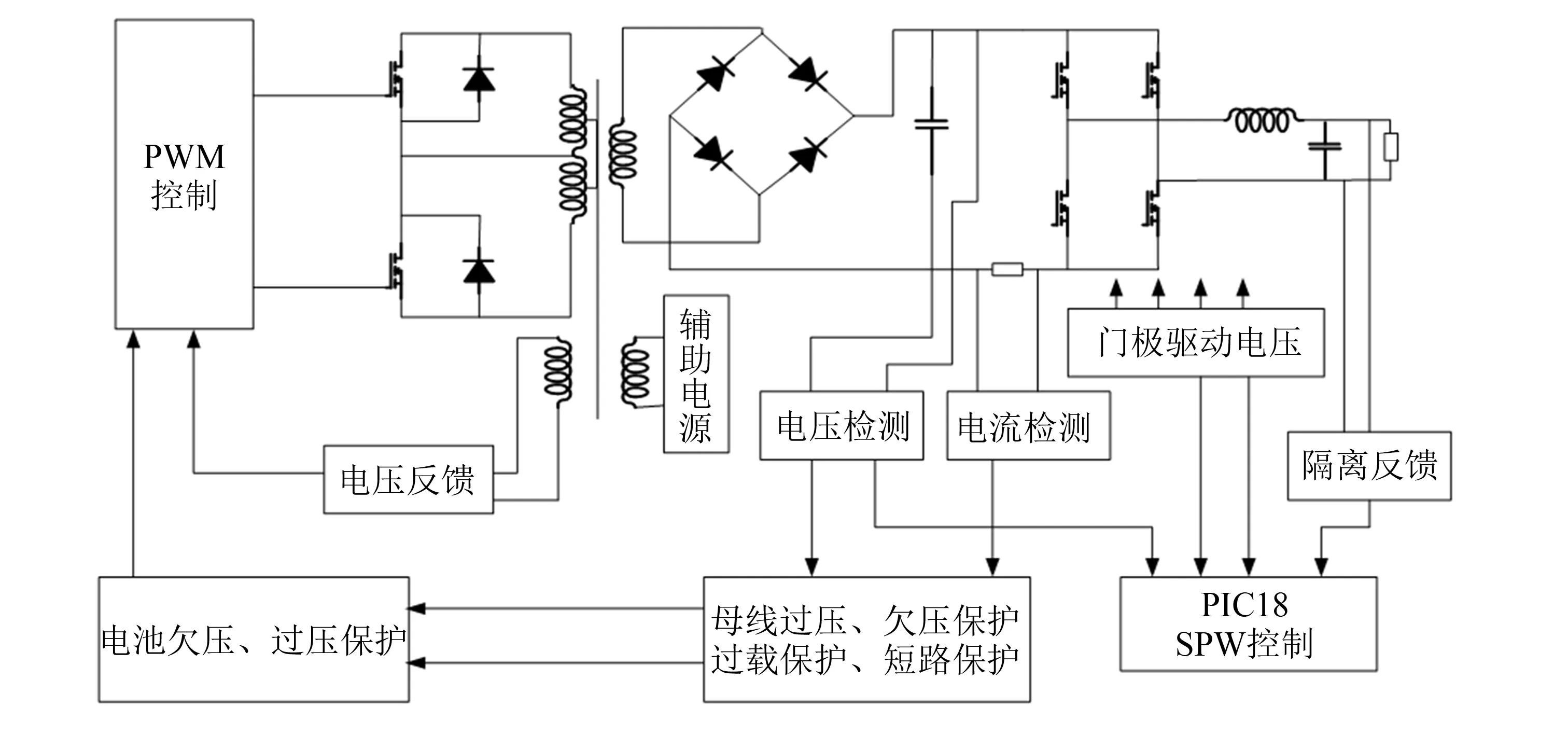
图7 DC/AC逆变装置主电路原理图Fig.7 Principle diagram of main circuit of DC/AC Inverters
3.2 DC/AC逆变装置实验结果分析
对系统实物电路进行测试,如图8所示.其中,图8(a)按从上到下分别为开关管S3,S5,S4,S6的驱动波形,图8(b)为逆变装置的输入输出电压波形,图8(c)为逆变装置的最终实物图.系统要求输入电压24 V直流电压,输出电压为220 V 50 Hz交流电压,图8(b)中的蓝色波形为输入直流波形,红色为输出交流波形,测试结果显示,输入电压基本稳定于24 V,输出电压频率在50 Hz,有效值约212 V,基本满足设计指标.
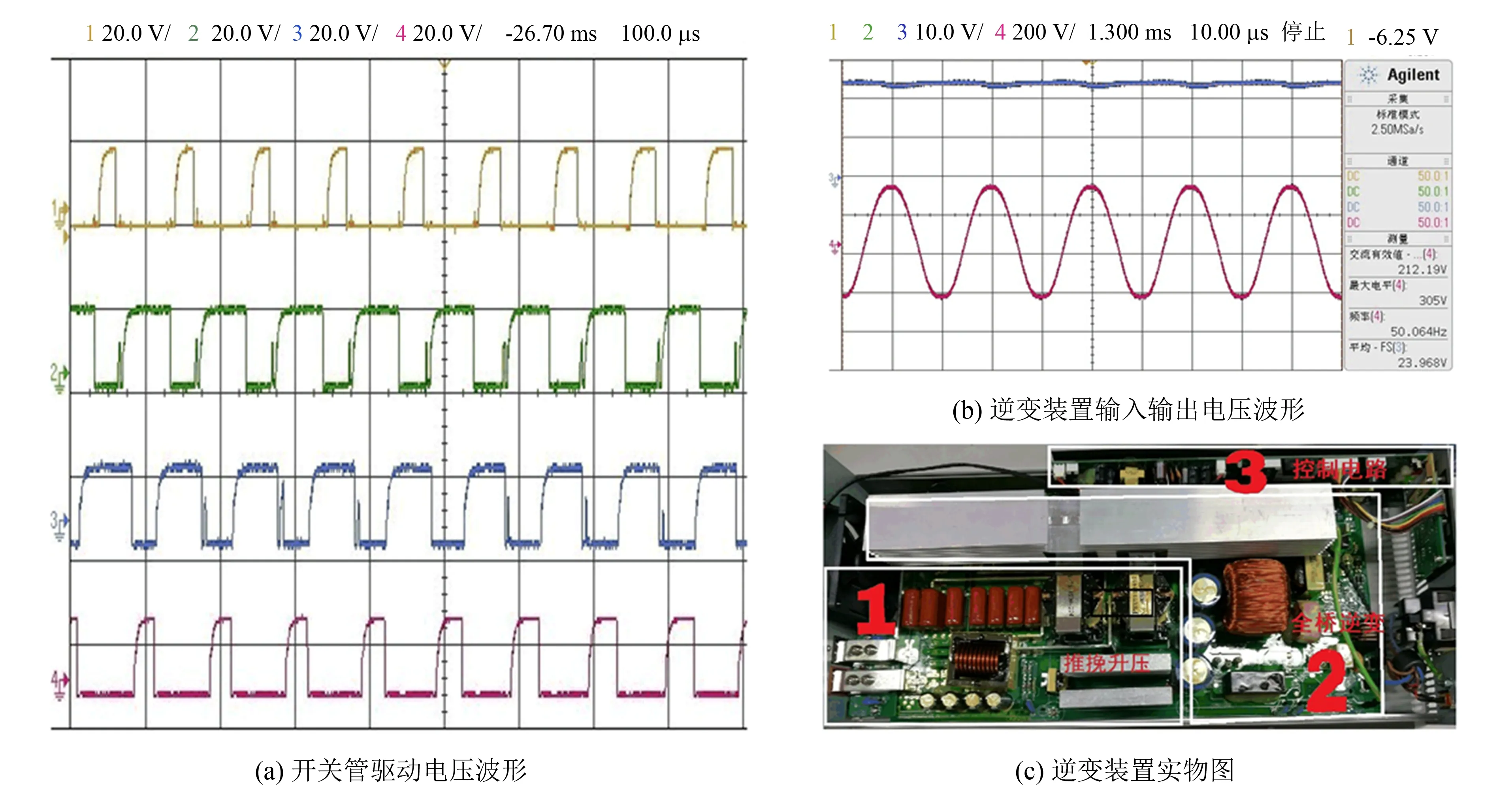
图8 DC/AC逆变装置实验结果图Fig.8 Experimental results of DC/AC Inverters
4 手机APP远程监控
自然灾害后无人机需尽快进行巡检,而电池日常不能满电保存,采用手机APP远程控制其立刻充电可缩短出发时间.无人机电池不能过充、过放,电池的日常维护可提高电池的使用寿命.设计的APP还提供充/放电状态、充/放电次数以及充/放电远程控制,实现无人机电池日常维护的自动化管理,有效降低电池管理的人力和时间成本,大幅度减轻无人机维护的工作量.
手机APP采用Android开发,界面采用极简风格和平面化设计.TCP/IP协议是一种面向连接的高效以太网传输协议,具有较好的稳定性与安全可靠性[12].利用TCP/IP通信协议,可将充电装置中的智能充电管理模块采集到的电池电压电流信息传输到远程APP控制界面,同时也可在APP端控制电池充放电,从而实现灾后巡检无人机电池管理.
5 结语
针对灾后无人机应急充电管理需求,提出基于整流逆变与TCP/IP技术的无人机灾备车载应急充电电源管理系统研制.采用交错并联PFC和远程APP,研制无人机灾备车载应急充电电源管理系统.在灾备行进途中或灾备现场,对不同厂家、不同型号无人机(锂电池)或交流负载实现应急充电及充电装置的远程APP监控管理,有效解决无人机在外出巡检时无法进行应急充电续航问题,大幅度扩大无人机的续航能力和巡航范围,缩短灾后紧急外出巡检的准备时间,对灾后无人机巡检起到重要的保障作用.此外,对其它无人机野外作业现场的电池能量持续供电也具有保障作用.
