基于LoRa集成北斗通信技术的应急响应设计与实现
2020-04-07尹小俊陈崇成李瑞兴王凤姣
尹小俊,陈崇成,李瑞兴,王凤姣
(1.闽江师范高等专科学校计算机系,福建 福州 350108;2.物联网福建省高校应用技术工程中心,福建 福州 350108;3.福州大学数字中国研究院,福建 福州 350108)
0 引言
应急通信是指在自然灾害或公众事件的紧急状态下,提供的一种暂时稳定、快速响应的通信方式作为支撑,从而满足现场信息交互的即时需求.当前,对于自然或人工灾害等应急类场景,通常需要运营商的应急保障车现场搭建微型通信基站,通过无线技术实现移动用户的接入.但基站与保障车需在一定距离内维持有线连接,以持续供电确保通信链路的可靠性,具有应用局限性[1].因此,如何克服应急场景恶劣的通信环境,创新应急通信方法成为当前研究的主要趋势[2-3].
近年来,为满足社会发展需求,无人机的市场由原先的军用级逐渐拓展至行业级、消费级,小型无人机系统的推广,使其功能按需求定制成为一种可能[4-5].低功率广域网(low-power wide-area network,LPWAN)技术凭借低功耗、远距离与广覆盖等优势特别适合城市级物联网应用,改变传统依赖于基站中继的信息收集与传递方式,能够快捷、方便地实现区域的覆盖与远距离传输[6-8].
应急环境通常存在基站损坏、区域弱覆盖等现象,基于蜂窝的移动通信系统及无线网络无法正常工作[9].与地面基站通信不同,卫星通信是利用人造地球卫星作为中继站所提供的通信服务,工作稳定且不易受自然灾害影响,特别适用于应急场景[10].我国自主研发的北斗通信系统近年得到了快速的发展,北斗卫星全天候、无盲区的工作特点提供可靠性较高的定位、导航及通信服务,稳定性较好的北斗短报文功能有效地解决了通信网络的覆盖问题[11-12].目前,基于北斗短报文的通信功能在生态环境监测[13]、海洋地质[14]、气象预警[15]等行业已广泛应用.
本研究从应急场景的信息需求出发,以数据处理与传输方法为研究重点,使用传感器采集、GPS定位、LPWAN传输、北斗短报文通讯等核心技术,集区域环境数据采集与远程传输为一体的感知传输系统,为应急救援工作提供高效、准确的信息获取方式,更好地推进应急通信的多元化建设.
1 设计方法
1.1 总体架构

图1 通信系统结构Fig.1 System of communication architecture
研究以物联网经典架构为基础,提出一种新型通信组合方法,结构上以感知终端为采集节点,负责区域环境数据采集,采用LoRa技术进行数据传输;汇聚终端作为网关实现节点数据汇聚,并集成北斗通信技术实现远距离通信.通信系统结构如图1所示.
1.2 感知节点与汇聚终端
应急场景下,无人机搭载感知节点执行区域环境数据采集、传输并汇报节点位置以便后台定位跟踪,结构如图2(a).汇聚终端完成感知节点数据的接收、归类与备份,集成北斗模块实现远距离通信.终端集成LoRa与北斗两大传输模块,分别用于节点网内传输与服务端远程通信,如图2(b).汇聚终端嵌入GPS模块,通过地理位置信息为无人机的路径规划提供依据.

图2 硬件结构框图Fig.2 Block diagram of the hardware
1.3 关键技术
近年来,以LoRa为典型低功耗广域网技术的出现,解决了以往无线通信领域中通信距离与功耗的矛盾[16],它在相同功耗的条件下比其他无线方式传输距离更远,无障碍的最佳通信距离可达20 km.不同于目前主流的频移键控(frequency-shift keying,FSK)机制的无线通信系统,LoRa基于chirp[17-18]扩频调频调制方式,突破了传输距离和功耗的限制,呈现了真正意义上低成本、低功耗与长距离的全新通信技术,逐渐在灯控[19]、泊车[20]、电力[21]等领域得到应用.
北斗短报文的通信、位置上报、应急报警等功能较好地适应户外环境,可在应急救援、抢险救灾、森林巡检等行业提供服务.实际应用可在应急场景的关键区域部署一定数量感知节点,优化部署策略,使用一个网关实现节点数据的汇聚,最终通过北斗短报文功能完成协议报文的远程上传.
2 实现过程
2.1 感知节点电源

图3 感知节点电源方案Fig.3 Power supply scheme of sensory node
以往节点使用碱性电池等供电方案,多为一次性使用耗材,回收利用存在一定困难,且存在环境污染风险.本节点采用锂电池对主板持续供电,兼容移动电源与太阳能电池充电接口,如图3所示,供电系统分为降压与升压两模块.其中,3.3 V-A对主控系统及指示、报警等模块供电,3.3 V-B作为备用电源在LDO模块失效后能快速接入.同时,LoRa宽电压特性支持2.5~5.5 V电源,故设计3.3 V-C满足LoRa模块调试.此外,升压模块的5 V与12 V可用于传感器供电调试.
2.2 GPS定位与LoRa传输
为获取感知节点地理位置,节点配置中科微ATGM336H定位模块,如图4所示.图4中U201接入独立可控的3.3-B电源供电,在引脚VBAT上预留纽扣电池防止主电源供电失效.LoRa模块选型无线串口AS62-T30,数据收发长度达256 B.图4中U205引脚MD0、MD1与MCU通过高低电平输入实现模块的正常、唤醒及休眠模式,引脚AUX可输出不同时长的高低电平,用于无线收发工作指示.

图4 定位与传输模块电路Fig.4 Circuit of location and transmission module
2.3 感知节点任务流程
感知节点的任务流程,划分为接口资源初始化、传感器驱动、GPS数据解析、数据融合、LoRa无线传输等,如图5所示.感知节点上电后启动状态自检,其数据采集与传输过程独立进行,采集周期通过指令实时可控.为实现“采发独立”,节点数据包生成周期约3 s,适应北斗短报文1 min的发送周期要求,合理设置图5定时时间,启动LoRa初始化配置,将备份区内最新采集的节点数据包传输至汇聚终端.
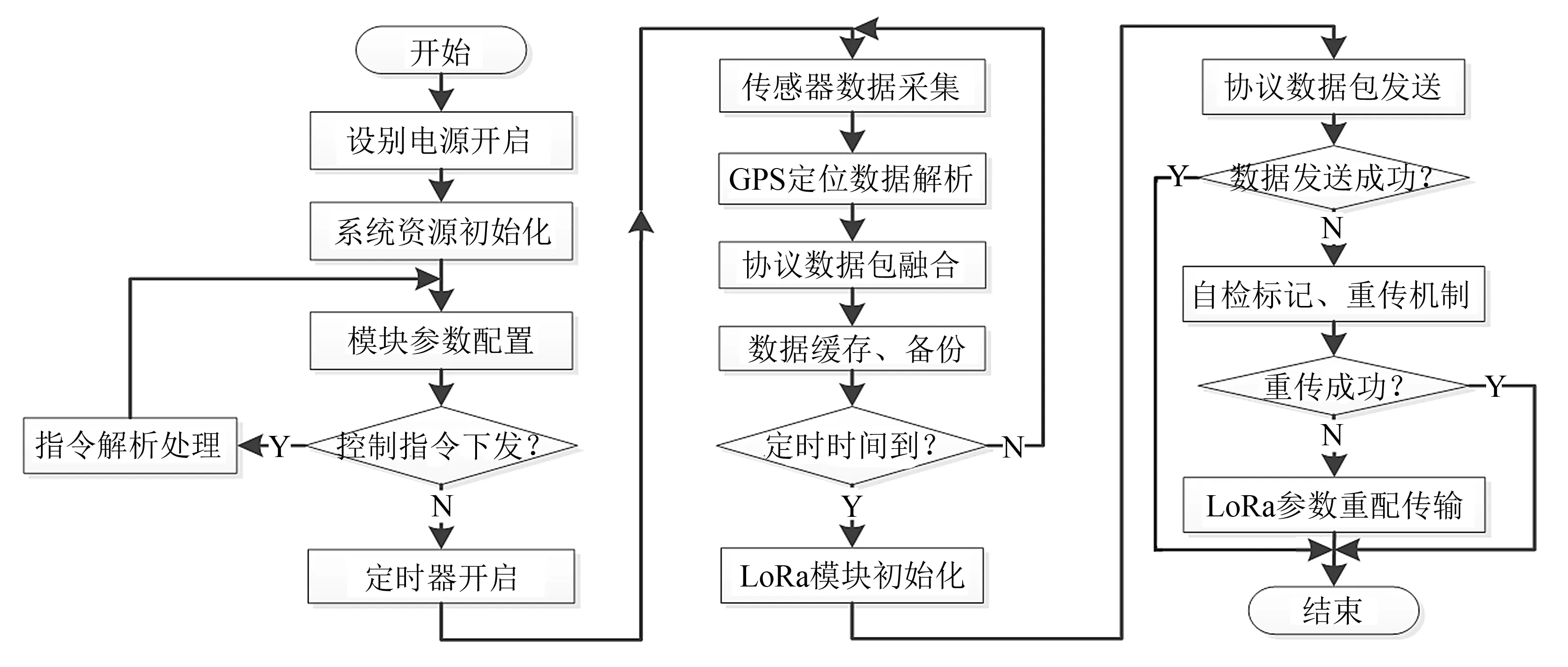
图5 感知节点事件流程Fig.5 Event flow of sensory node
2.4 北斗通信与协议设计
汇聚终端的北斗通信是实现感知层与应用层链接的唯一通道.模块采用福大北斗自研的北斗短报文一代FB3154.设计图6电源管理D与E供电并调试,分别满足北斗通信的收发功能.

图6 北斗电源电路与通信调试Fig.6 Power circuit of Beidou and communication debugging
感知节点的数据通过北斗模块的短报文实现远程传输,应遵循北斗2.1版本的接收机协议,需配备北斗通信卡获取授权,系统采用民用领域三级卡,短报文长度限制为78.5 B,如图7所示.结构包含一、二、三级字段,一级字段为北斗协议标准,占5 B,起始符与结束符分别以‘$’、‘*’固定填充,中间字段用‘,’分隔,校验码是将‘$’与‘*’间字节(含分隔符)异或运算以确认报文可靠性;二级字段中控制指令通过串口下发数据采集、传输等任务,目的地址为接收方的通信地址,传输方式选择汉字与字符混合制;三级字段为节点数据包,根据需求自定义设计.表1示例,报文仅占39 B,由于北斗短报文的发送周期最小间隔为1 min,为提升通信效率,可设置每条短报文含2条节点数据,共占68 B,符合长度限制.

图7 协议设计Fig.7 Design of protocol
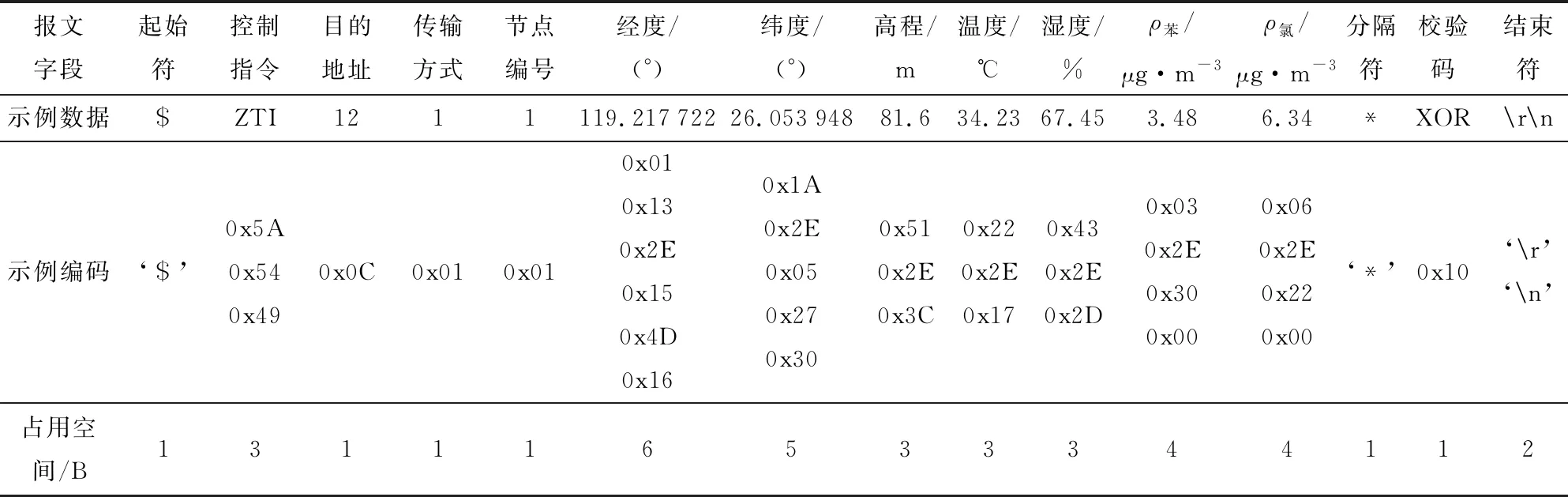
表1 数据报文示例
3 测试分析
3.1 测试方案

图8 测试总方案Fig.8 Scheme of general test
受限于环境测试与资源分配等因素,本次研制设备数量为3台.其中,感知节点2台(编号01、02),分别定义为感知层数据获取与传输层中继接力;汇聚终端1台(编号03),定义为网关节点,完成远程北斗通信.测试分为地面与空中两个阶段,执行线性传输方式,测试总方案如图8所示.
3.2 地面测试
地面通信测试选取福州市橘园洲特大桥、浦上大桥与湾边大桥,可视直线范围内无明显障碍物,设置两类方案进行通信效果测试,具体如下.
方案一: 节点01与节点03布放于橘园洲大桥,相距约500 m;节点02布放于浦上大桥,与节点01相距约3.6 km,与节点03相距约3.2 km,部署如图9(a)所示.
方案二: 节点01与03布放于橘园洲大桥,相距约500 m;节点02布放于湾边大桥,与节点01相距约7.9 km,与节点03相距约7.5 km,部署如图9(b)所示.

图9 部署与测试Fig.9 Deployment and test
节点01生成节点数据包,通过LoRa发送至节点02的LoRa接收,并转发至节点03,通过北斗模块发送至北斗移动终端.经随机报文测试可知,节点与终端LoRa线性组网,在3.0~4.0 km通信距离内无丢包与延迟.表2为方案一测试结果,定点距离检测功率,均可收到4个波速信号强度.后台可实时接收并解析报文,在3.6 km的通信距离内,报文收包比可达100%,具有较高的稳定性.

表2 方案一测试
方案二转发机制与方案一相同,但节点02与节点03接收数据包后,都将解析并添加本机传感器数据与地理位置信息,封装后再执行转发,测试结果列于表3,执行协议报文测试时,距离延长致使北斗模块驱动力减弱,收包比降至54.01%.同时,LoRa线性传输在此边缘距离内,节点均会出现不同程度的丢包现象.
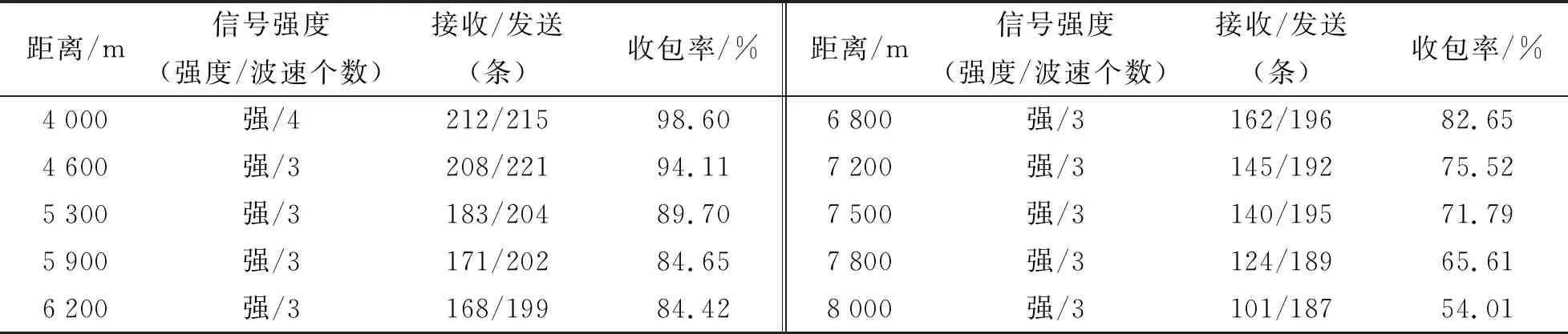
表3 方案二测试
3.3 空中测试
空中测试选取福州大学国家大学科技园1号楼前广场.考虑实际载重与挂载安装情况,无人机选型大疆精灵.节点01、节点03与北斗移动终端布放至广场圆台中央,节点02挂载至无人机上进行升空测试,如图10(a).无人机于科技园内1号楼前广场起飞,依次升空距地面节点的空间距离为0.5、1.0、1.5、2.0 km处进行传输测试,执行地面测试方案二数据转发机制.以过半收包率作为最大通信距离标准,定点间隔距离处执行10条数据包的收发测试,如图10(b).可知: 受无人机天线干扰,当节点02的LoRa天线放置在无人机顶端天线中间时,节点间最大通信距离约为1.0 km;当天线放置在封装壳体底部时,最大通信距离约为1.5 km;当天线放置于无人机升降架上,由于无人机续航限制,实测节点距离在2.0 km内,获得较好通信效果.同时,LoRa天线置顶或置底时,空中通信若超出上述距离,节点会出现较为严重的丢包现象.

图10 部署与升空测试Fig.10 Deployment and test of launching
4 结语
研究提出一种基于LoRa集成北斗的新型通信组合机制.经地面与空中实验,研究组合通信的距离阈值.空中测试表明,无人机与LoRa天线在未冲突频段运行时,传输效果也会受到一定干扰.综上,基于LoRa集成北斗的通信机制在有效范围内可保持稳定的通信质量,解决了当前应急场景下存在的通信盲区问题,为现场数据的获取提供一种新型通信方式,具有一定应用价值.
本次测试方案也存在需改进之处: 测试环境上,可设高楼、树木等障碍物测试传输性能;传输方式上,可增加感知节点数量,进一步探索LoRa组网研究,以适应复杂场景需求;节点运行稳定时,还可进行无人机路径规划与数据挖掘等相关研究,从而丰富应急响应体系的场景应用.
