足球机器人腿部机构设计与步态规划研究
2020-04-02余莎
余 莎
(陕西中医药大学体育部,陕西 咸阳 712000)
足球机器人是当前仿人形机器人研究的重要部分,涉及人工智能、自动控制等多个领域,是国家高科技领域的重要研究方向之一。足球机器人行走的稳定性是机器人设计的重要指标,为了确保足球机器人的稳定性,需要对足球机器人的腿部机构进行优化设计。研究足球机器人腿部机构设计与步态规划方法,对提高机器人的稳定性具有重要意义[1]。其中研究足球机器人的腿部机构与步态规划控制器,能够改善足球机器人的稳定性。目前对足球机器人腿部机构进行设计与步态规划,需要以控制律的优化为基础。当前主要的控制方法有模糊PID(proportion integral differential,比例积分微分)控制方法[2]、反演控制方法、积分控制方法以及BP(back propagation)控制方法等[3-4]。文献[5]提出一种足球机器人自适应鲁棒轨迹跟踪控制方法,通过构建足球机器人腿部机构的纵向运动数学模型,进行腿部机构控制目标函数和控制约束参量分析,采用运动轨迹的俯仰跟踪控制方法进行腿部机构控制器的优化设计,提高了控制稳定性,但该方法的自适应控制性能较差,控制结果误差较大;文献[6]提出基于脉冲激光测距的足球机器人腿部机构设计与步态规划方法,以高清摄像头为基础,在摄像视频中写入激光测距指令进行机器人设计和步态规划,但该方法受外部扰动因素影响较大,机器人控制的鲁棒性较差。
针对上述问题,本文提出基于行走振动抑制及最优控制律的足球机器人腿部机构设计与步态规划方法,并通过仿真实验验证该方法的有效性。
1 足球机器人腿部机构的动力学分析及参量模型
1.1 足球机器人腿部机构的动力学分析
足球机器人腿部机构是机器人设计的关键,首先创建研究对象的整体结构,然后使用平行四边形传动机构驱动足球机器人腿部运动,通过不断地转换重心来实现机器人的稳定行走。足球机器人腿部结构原理如图1所示。
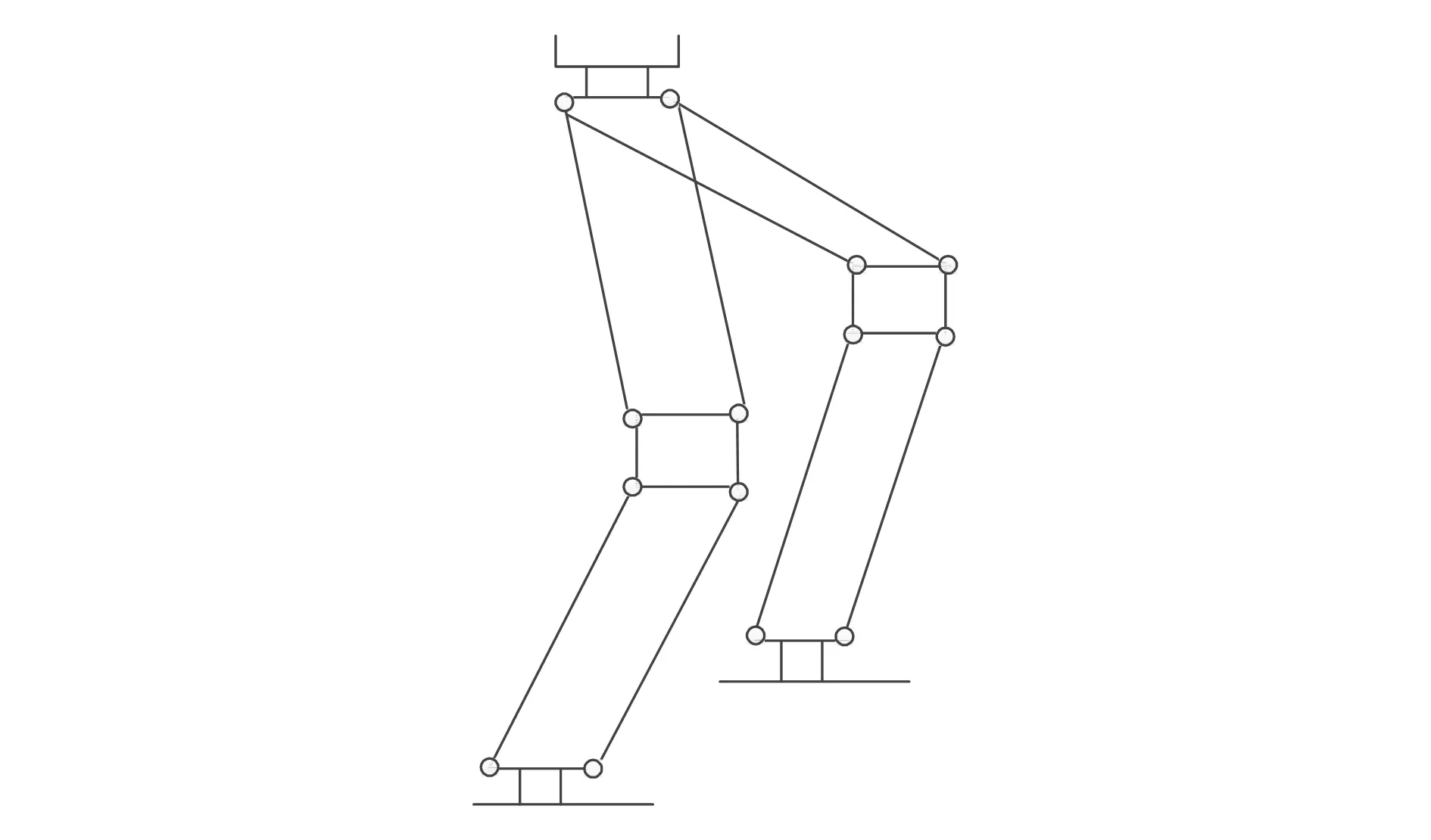
图1 足球机器人腿部结构原理
为了实现足球机器人腿部机构设计与步态规划,利用通信模块对人机交互信息进行处理,以处理之后的人机交互信息为对象,采用传感器采集足球机器人腿部各机构的运动位姿、速度数据,在数据采集和信息处理的基础上,构建足球机器人腿部机构的动力学模型[7]。根据机械结构形式的不同,结合传感器信息采集结果,将机器人的扰动因素分为外部扰动因素和模型误差[8],以此为基础构建非线性方程组:
(1)


(2)

由此得到足球机器人腿部机构的运动学方程为:
(3)
式中:αR为惯性力向量;Mgr为哥氏力向量;Fgr为离心力向量;xR为重力向量。
通过构建足球机器人腿部机构的D-H参数和运动学模型,得到足球机器人腿部机构位姿ε和末端效应器位姿pe的动态逆运动学关系式:
pe=f(ε)pt
(4)
式中:pt为足球机器人逆运动的平移常量。用齐次坐标IT0(α0,β0,γ0)表示足球机器人腿部机构的运动部件的力学参数集,根据足球机器人的动力学特征方程及动态逆运动学关系式对足球机器人腿部机构进行动力学分析,实现腿部机构的优化设计。
1.2 足球机器人腿部机构的参数辨识
以上述动力学分析结果为基础,在给定的质心加速度约束下进行足球机器人腿部机构的参数辨识[9]。设质心加速度为c,其约束条件为:
(5)
得到足球机器人非刚性建模的控制模型:
(6)
式中:b1,b2,b3,b4为足球机器人4个滑轮上的控制参量。
设学习步长为η,无迟钝延时的传递函数为W(n),则整个控制对象的传递函数W(n+1)为:
W(n+1)=W(n)-ηΔW(n)
(7)
式中:△W(n)为原始传递系数。
在小扰动约束下,选择加速度作为控制量,采用解析法求取足球机器人腿部机构的动力学模型辨识参数,其表达式为:
(8)

以质心运动定理作为机器人的步态规划轨迹,跟踪误差权重系数E可表示为:
(9)

(10)
利用上述足球机器人腿部机构的参数识别结果,进行步态规划和控制律的优化设计。
2 足球机器人腿部机构设计及步态规划优化
2.1 行走振动抑制及控制律设计
在构建了足球机器人腿部机构的动力学模型、完成足球机器人腿部机构参数识别后,进一步优化足球机器人腿部机构设计及步态规划。本文提出基于行走振动抑制及最优控制律的足球机器人腿部机构设计与步态规划方法,对机器人双脚支撑期的步频和步速等参数进行最优解算,得到机器人轨迹的线性空间规划的参数模型中的步频、步速矩阵为:
(11)
(12)


(13)
式中:Gn为轨迹映射函数。
采用末端空间位置调节方法进行行走振动抑制,建立机器人腿部机构与步态协调对应的状态空间模型,构建的行走振动抑制及控制律为:
(14)

2.2 腿部机构与步态规划联合控制
在足球机器人腿部机构的行为轨迹空间点的坐标系中,采用自适应参数调节方法,进行足球机器人腿部机构的线性空间规划,得到足球机器人腿部机构轨迹跟随纠偏的等价非线性时变反馈系统:
(15)
式中:usw为等价非线性时变反馈系数;K为刚度矩阵;gθ为质量对角矩阵;μ为无量纲参数;S(t)为反馈函数。
步态规划联合的协方差矩阵Ev(k)为:
Ev(k)=uswRv(k)+Vv(k)
(16)
式中:Rv(k)为协调因子矩阵;Vv(k)为足球机器人驱动力矩。
(17)
根据足球机器人腿部机构的运动部件对应的质心求得稳定性运动惯量参数,实现腿部机构与步态规划联合协调控制,优化控制问题描述为:
(18)
式中:ξi为关节波动率;R为步态规划的末端圆周标定半径。由此得出控制函数的最优解,可实现机器人腿部机构设计与步态规划。
3 仿真实验与结果分析
为了测试本文方法进行足球机器人腿部机构设计和步态规划的应用性能,进行实验分析。实验采用自主研发的Motoman UP6型足球机器人,机器人外貌图如图2所示。

图2 足球机器人外貌图
该足球机器人有8个自由度(其中头部2个,腿3×2个),身高50 cm,质量3.0 kg。运动学参数设置为:在大地坐标系中机器人的初始位置为(0,0.4,5.0),机器人移动空间中的目标位置为(1.0,2.6,8.0),机器人轨迹跟踪的偏移期望值为0.05 mm,步态规划的跟踪速度为24 mm/s,参考质心轨迹的惯性转矩为mr=1.13×104kg,步态规划的末端圆周标定半径为R=2.05 m。
根据上述参数设定,在仿真实验ADAMS软件平台中,构建足球机器人腿部机构三维模型,如图3所示。基于该模型进行足球机器人腿部机构设计和步态规划设计,采用传感器采集足球机器人腿部各机构的运动位姿、速度和人机相互信息,得到信息采样结果如图4所示。
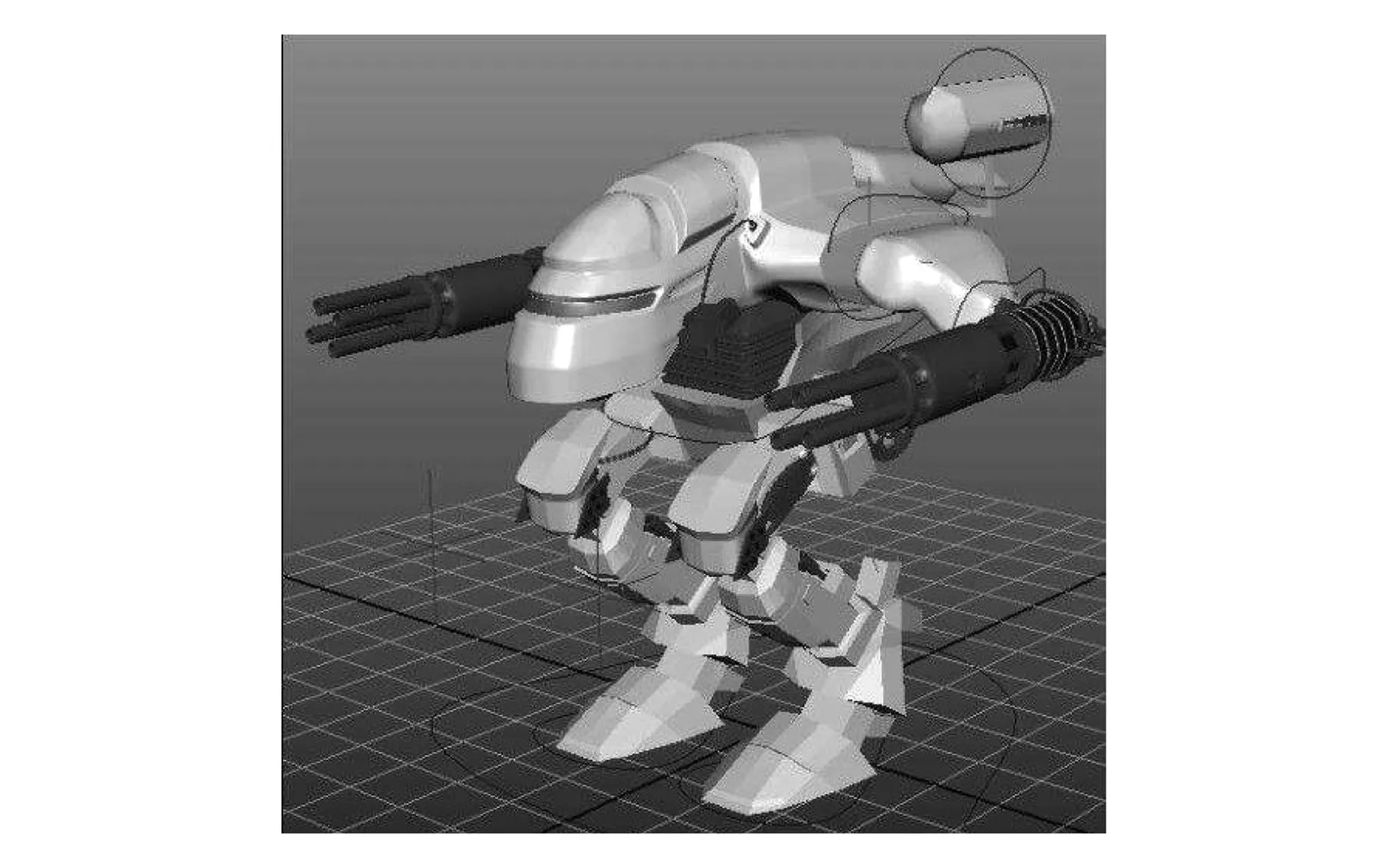
图3 足球机器人腿部机构三维模型
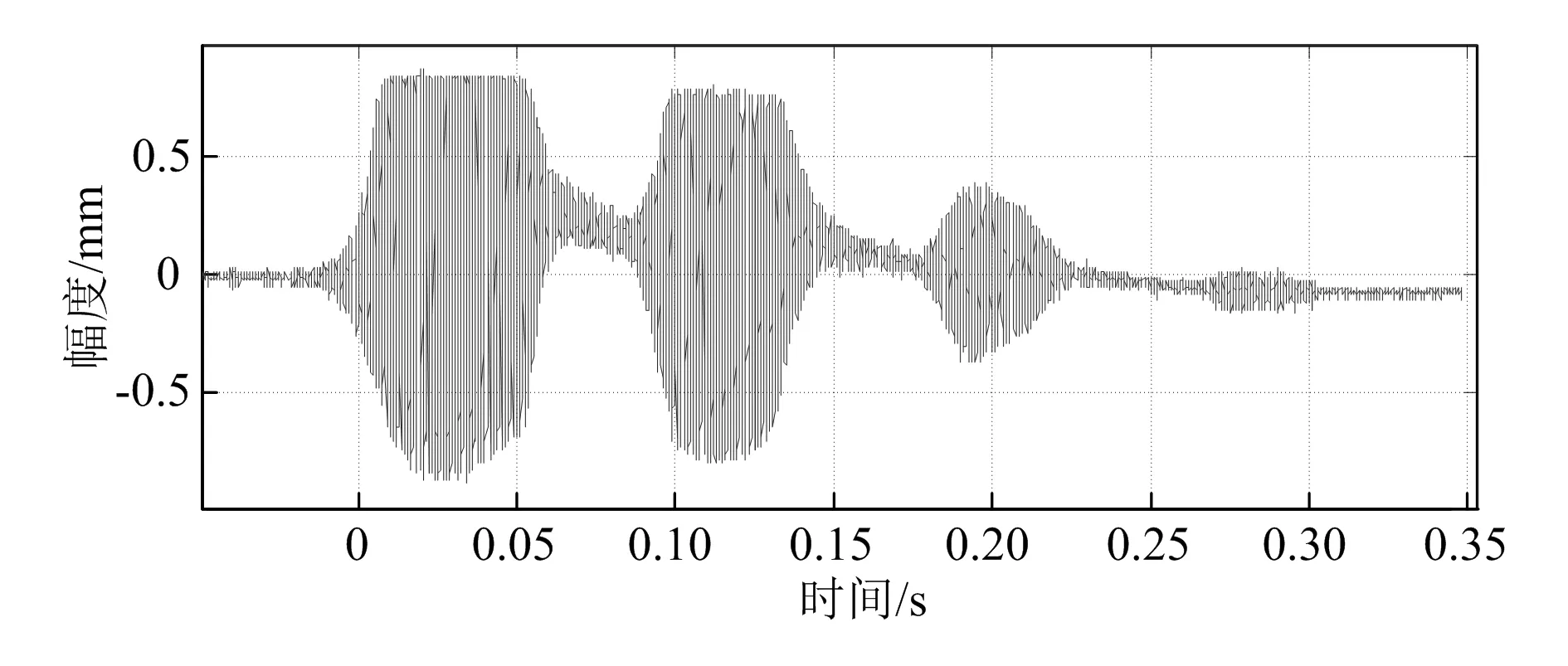
图4 足球机器人腿部机构的参数信息采样
以图4的足球机器人腿部机构信息样本为输入对象,对机器人双脚支撑期的步频和步速等参数进行最优解算,采用末端空间位置调节方法进行行走振动抑制,得到机器人的步态规划参数优化解析结果,如图5所示。

图5 机器人的步态规划参数优化解析结果
分析图5可知,0.15 s以后,参数输出幅度稳定在0 mm附近,说明采用本文方法能有效实现对机器人的步态规划参数解析,误差跟踪和干扰抑制能力较强。
测试步态规划性能,得到测试结果如图6所示。
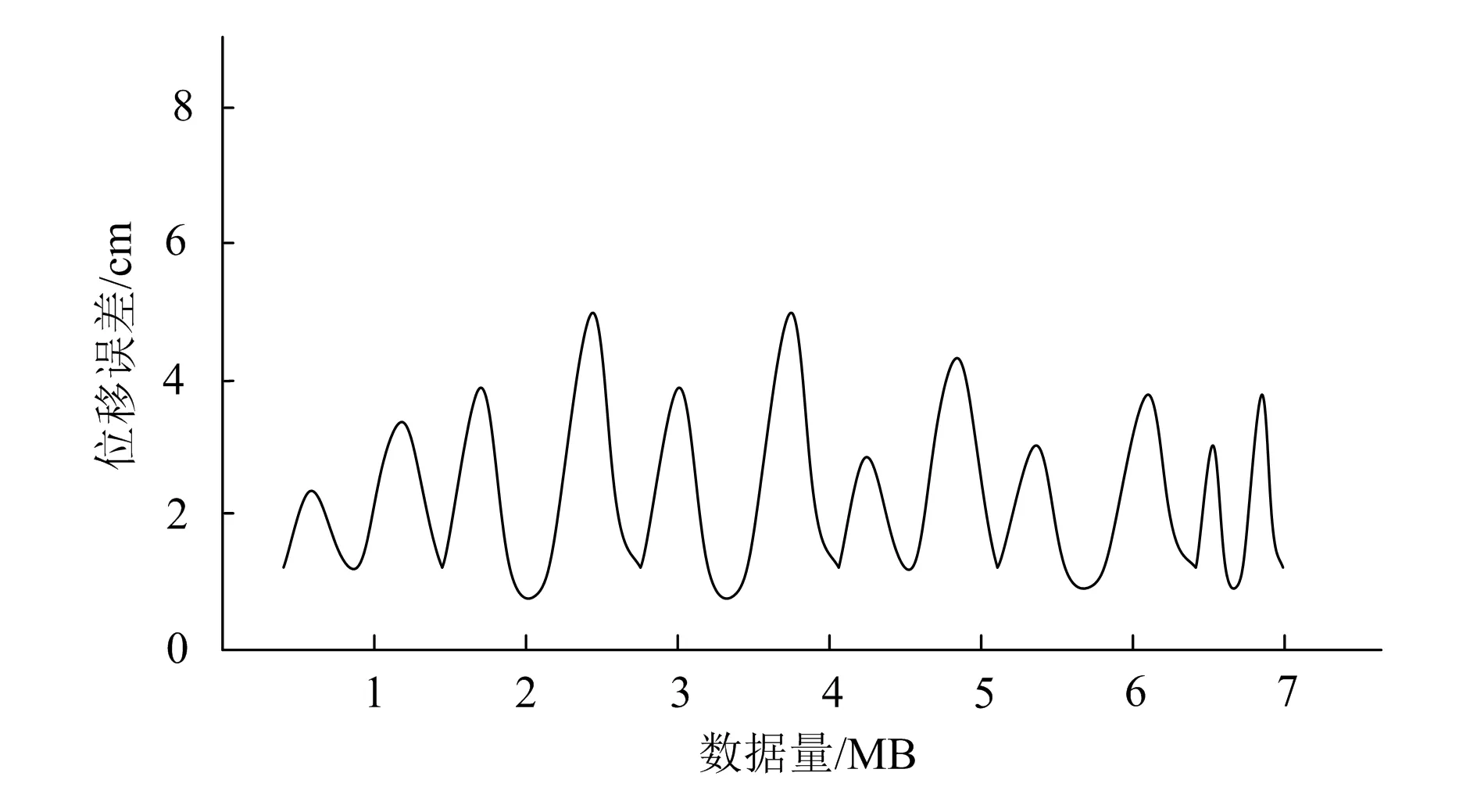
图6 机器人的步态规划结果
分析图6可知,采用本文方法进行足球机器人腿部机构设计和步态规划时,测试得到的机器人位移误差较小,说明误差跟踪自适应调节能力较强,满足步态轨迹跟踪需求。
利用本文方法、PID算法、SVM(support vector machine,支持向量机)算法进行足球机器人腿部机构设计和步态规划的误差计算,将误差值量化为常数,其误差对比结果见表1。
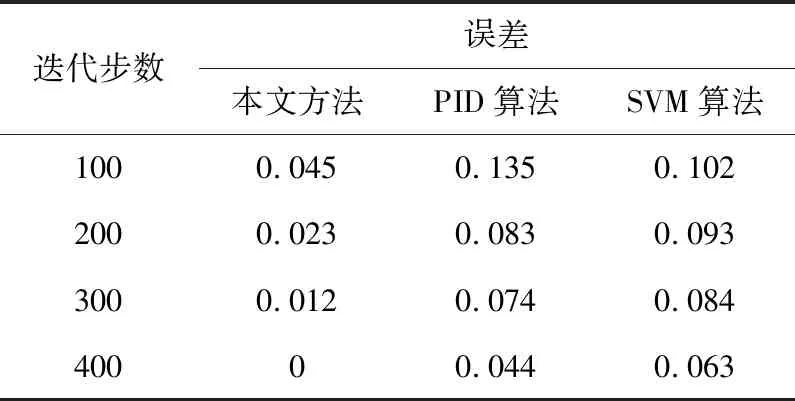
表1 位移误差对比 cm
分析表1得知,本文方法平均误差为0.020 cm,PID算法平均误差为0.084 cm,SVM算法平均误差为0.086 cm,说明利用本文方法进行足球机器人腿部机构设计和步态规划,误差较小,鲁棒控制性能较好。
4 结束语
本文提出基于行走振动抑制及最优控制律的足球机器人腿部机构设计与步态规划方法,采用仿真实验分析机器人的步态规划参数优化结果,证明了本文方法能有效实现对机器人的步态规划参数解析;分别采用本文方法及PID算法、SVM算法计算足球机器人腿部机构设计和步态规划中的误差,结果表明本文方法的位移误差最小,说明该方法的误差跟踪自适应调节能力强。通过实验分析能够得出,该方法能有效实现足球机器人腿部机构设计与步态规划,提高足球机器人控制的鲁棒性。
