波长编码型光纤传感器高精度解调技术研究进展
2020-04-02陈嘉庚刘庆文赵双祥何祖源
陈嘉庚, 刘庆文, 赵双祥, 何祖源
上海交通大学区域光纤通信网与新型光通信系统国家重点实验室,上海200240
与电子式应变传感技术相比,光纤应变传感技术基于光纤器件丰富的种类与独特的传感机制,以及电子传感元件所不具备的诸多特性,因而能够提供传统的电子式传感器所无法达到的指标与性能.光纤传感技术自20 世纪70年代提出以来,经过数十年的不断发展,现已成为电子信息技术领域中的重要分支之一.基于光纤自身具备的多项独特优势,同时得益于近年来光通信技术、电子技术等相关领域的飞速发展,各类光纤传感器的性能不断进步并逐步实用化.其中,光纤应变传感技术作为光纤传感技术诸多分支中发展较为完备且应用十分广泛的一支,自被提出以来便得到各个领域科研人员的重视与关注,其技术方案的典型代表为光纤布拉格光栅式应变传感器[1-2],现已广泛应用于各类实际场景.然而,受限于传统的光纤光栅应变传感技术所能达到的测量分辨率等性能极限,对于某些特定的应用,如要求传感器具备优于nε级传感精度的地壳形变观测领域,传统的光纤光栅式应变传感器由于精度不足,无法直接应用于该场景中.
此外,光纤传感系统的灵活性使其能够根据特定场景中的具体情况,通过对传感器进行针对性的设计与优化,可以最大程度地满足特定应用对传感器的要求.在应变传感领域中,光纤应变传感器在测量精度、长期稳定性、可阵列化等主要指标方面表现突出.特别地,在对应变测量精度要求远高于一般工程应用的特定科学研究或应用场景下,高精度光纤应变传感器具备明显的技术优势与潜力,因而对其展开深入研究具有较高的科学意义与实用价值.
本文主要介绍应变探测能力优于nε级的高精度光纤应变传感技术,首先由传统光纤光栅式应变传感器的原理与技术方案引出高精度光纤应变传感技术及其所用的波长编码型应变敏感单元,并在此基础上阐述近年来为突破传统解调方案性能瓶颈所提出的新型高精度解调技术方案,包括前馈式扫频激光线宽压缩技术与闭环轮询反馈式探测技术,最后给出基于上述技术方案的实际应用案例.
1 光纤光栅应变传感器与高精度光纤应变传感器中的敏感元件
1.1 光纤光栅式应变传感器回顾
图1为一个典型的单通道光纤布拉格光栅(fiber Bragg grating, FBG)应变传感系统及其原理示意图.系统中由覆盖FBG 反射谱区的宽谱光源探测作为敏感单元的FBG,其反射光谱由光谱仪测得.当光栅上施加的应变(或温度)发生变化时,其反射谱中心波长,即布拉格波长λB相应地发生变化[3-4],光谱仪通过当前测得的反射谱得到FBG 的布拉格波长的变化量,进而计算出FBG 上所施加的应变量.
一般地,FBG 的布拉格波长ΔλB变化量与待测应变ε及温度T满足关系

式中,Kε与KT分别为FBG 的应变与温度灵敏度系数,由光纤光栅自身特性决定;ε0与T0分别为光栅初始应变与初始温度.假定光栅温度不变的情况下,则可由测得的ΔλB与Kε的比值求得待测应变.实际上,除图1中给出的解调方式外,用于对FBG 或FBG 阵列进行探测的光学系统(即解调系统)存在多种技术方案,其各项性能与成本也各不相同;但光纤光栅式应变传感器的解调系统的主要目标始终为直接或间接获取待测FBG(或FBG 阵列)的布拉格波长λB或布拉格波长变化量ΔλB.
在不考虑光栅温度发生大范围变化的情况下,可近似认为FBG 的应变灵敏度系数Kε为常量,如常规1 550 nm 单模光纤刻写的FBG,其应变灵敏度系数Kε=1.1 pm/με.因此,决定应变测量精度的主要因素为解调系统对光栅布拉格波长的测量精度.对于波长分辨率达到1 pm 的解调系统,其能够实现的应变分辨率约为1 με(即10-6ε);若希望实现1 nε(10-9ε)级的应变测量分辨率,则要求解调系统达到至少1 fm 级别的布拉格波长测量分辨率.
1.2 π 相移光纤布拉格光栅
常规光纤布拉格光栅的反射谱难以实现0.1 nm 以下的宽度,这对于解调系统实现nε级测量分辨率极为不利,故高精度光纤应变传感器的传感元件一般不使用常规FBG 作为敏感单元.综合考虑各种波长编码型光纤元件的性能、制备成本及可靠性,在高精度光纤应变传感器中,通常选用π 相移光纤布拉格光栅[5](π-phase-shifted FBG, π-PSFBG)或基于光纤光栅的法-珀干涉仪(FBG Fabry-Perot interferometer, FFPI)作为敏感元件,二者的共同特征体现在其反射谱中具有极窄的谐振峰.
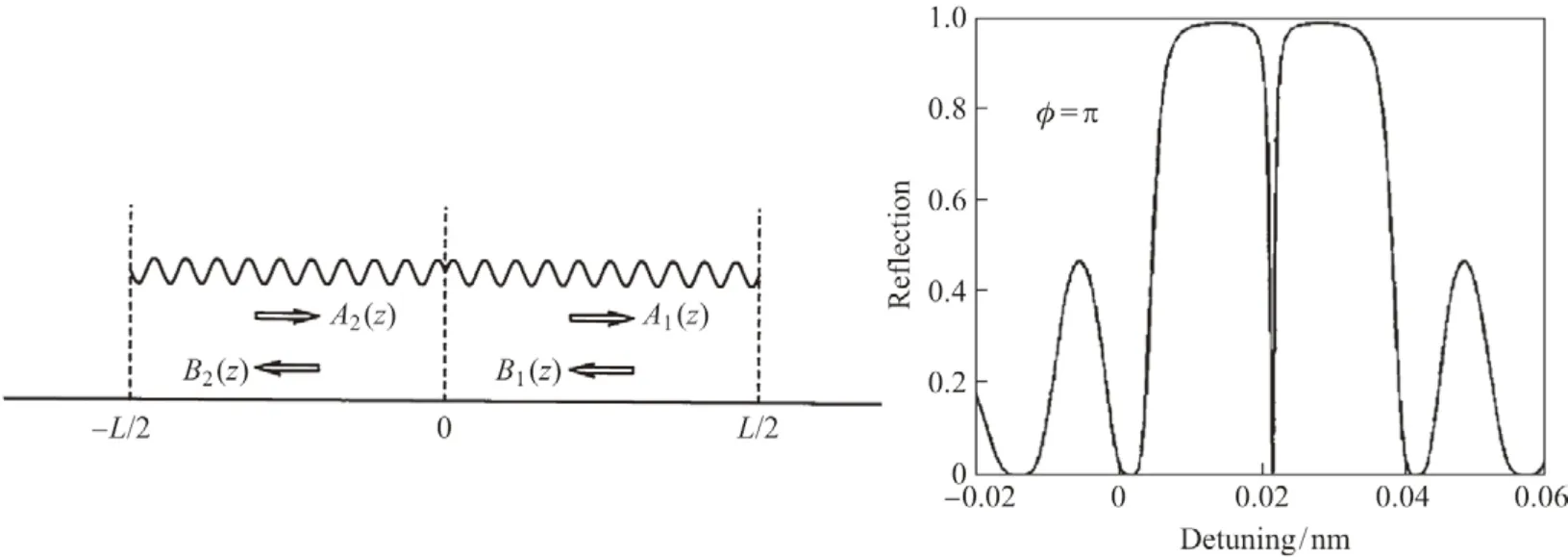
图2 π相移光纤光栅的纤芯折射率分布与典型反射率谱[6-7]Figure2 Distribution of core refractive index and typical reflection spectrum of π-PSFBG[6-7]
π-PSFBG 为常规FBG 的变种,二者区别在于,前者折射率周期性变化的栅区中心处被引入半个周期的延迟,如图2所示,其栅区的纤芯折射率n(z)的分布可表示为[6]

式中,n1为栅区平均折射率,Δn为光栅折射率调制深度,Ω为光栅周期,L为栅区长度.根据微扰波导模式耦合方程可求解出π-PSFBG 的反射率谱[6],典型的π-PSFBG 布拉格波长附近的反射率谱如图2[6-7]所示.可见,栅区折射率周期性调制中引入的半周期相移使π-PSFBG布拉格波长处出现单个谐振峰.在理想情况下,该谐振峰宽度由为调制深度Δn及栅区长度L决定,Δn及L越大则谐振峰越窄.受光栅刻写工艺及成品率所限,商品级π-PSFBG 的中心谐振峰宽度目前可达到0.1~1.0 pm量级,此时π-PSFBG 布拉格波长附近的反射率高于99%,其尺寸通常在5 cm 以内.
图3给出了π-PSFBG 用于应变(或温度)传感时光谱变化情况的示意图.当应变(或温度)发生变化时,其中心谐振波长发生改变.由于其谐振峰宽度较窄,待测物理量发生微弱变化即可导致显著的响应,且灵敏度系数与常规FBG 一致.相比之下,常规光纤光栅的反射谱宽远大于π-PSFBG 的谐振峰宽度,由此可见,选择π-PSFBG 作为敏感元件有利于传感精度的大幅提升.

图3 π 相移光纤光栅的应变/温度传感机制示意较图Figure3 Illustration of π-phase-shifted FBG as strain or temperature sensor
1.3 光纤光栅法布里-珀罗干涉仪
高精度光纤应变传感器中常用的另一类敏感元件为光纤光栅法布里-珀罗干涉仪(FFPI),其结构为同一段光纤上相距一定距离刻写的参数完全相同的一对布拉格光栅,两光纤光栅作为部分反射端面,构成法布里-珀罗(F-P)谐振腔[8].由法布里-珀罗干涉理论可知,FFPI 的反射率谱中将周期性出现透射点,即FFPI 的谐振峰.为使谐振峰尽量狭窄,应尽可能提高FFPI 两端作为部分反射端面的FBG 的反射率R,实际应用中可取0.99 以上.如1 550 nm 波段附近,取FFPI 腔长为L=1.00 m,两端FBG 反射率R=0.99 时,FFPI 的自由光谱范围为ΔνFSR= 100 MHz(0.80 pm),精细度,此时谐振峰的半高全宽δν=0.31 MHz,对应波长范围为0.002 5 pm.
与π-PSFBG 相比,FFPI 的谐振腔长不受限于光栅尺寸,因而可实现更窄的谐振峰.但作为敏感单元使用时,其尺寸大于π-PSFBG.此外,π-PSFBG 在其布拉格波长处只存在1 个谐振峰,而FFPI 的谐振峰在其整个工作波段内周期性出现.当受到轴向应变时,其反射光谱的响应与π-PSFBG 等波长编码型传感单元一致,故可通过测量FFPI 某个谐振峰中心波长的变化实现应变传感,其灵敏度系数等于同种光纤上刻写FBG 的灵敏度系数.
为方便描述,后文中用频率ν(=c0/λ)代替波长λ表征激光、π-PSFBG、FFPI 的光谱参量.当光频率变化Δν(光波长变化Δλ)远小于光频率ν(光波长λ)时,可将式(1)改写为

式中,Δν为敏感单元(π-PSFBG 或FFPI)谐振峰中心波长对应的光频率的变化量,kε与kT分别为应变与温度导致光频率变化的灵敏度系数.在后面的章节中将分别详细阐述基于前馈式扫频激光线宽压缩技术的π-PSFBG高精度解调方案[9]与基于闭环轮询探测技术的FFPI 阵列高精度解调方案[10].
2 前馈式扫频激光线宽压缩技术用于π-PSFBG 高精度解调
2.1 扫频激光器与前馈式激光线宽压缩技术
扫频激光即输出光频率随时间进行扫描的单频激光器.这里,“单频”指激光器输出光在某一时刻的频谱宽度远小于整个扫描范围;“扫描”指激光器输出频率在一段时间内不断向同一方向改变后返回并作周期性重复.若激光器的扫频范围覆盖π-PSFBG 的工作光谱范围,则可由扫频激光器根据单次扫描过程中获得的反射光功率时域曲线并根据时间-光频率映射获得其反射光谱.
由扫频光源进行π-PSFBG 高精度解调的关键在于扫频光源的线宽与扫频线性度.外腔式机械扫频激光器虽然可基本满足对π-PSFBG 进行高精度解调的要求,但较低的扫频重复率限制了传感器的采样率,同时其较高的成本及机械部件带来的运行寿命问题,降低了该方案的实用性.与之相对地,半导体DFB 激光器可基于其频率内调制效应[11],由扫描驱动电流产生重复频率较快、扫描范围较大的扫频激光且成本较低,稳定性好;但半导体DFB 激光器的输出线宽无法满足π-PSFBG 高精度解调的要求(即探测光线宽应远小于π-PSFBG 谐振峰宽),需对其进行线宽压缩和扫频非线性的补偿.
相比固定频率激光的线宽压缩与稳频,扫频激光的线宽压缩和扫频非线性补偿的难度更高.其原因在于单频激光的中心频率恒定或近似恒定,对其进行线宽压缩或稳频时可利用反馈结构将其锁定至稳定的光学谐振腔的某个谐振频率;然而扫频激光的频率随时间不断地变化,无法直接以固定的参考频率点作为调节的目标.另外,激光器受控输出扫频光时即占用了光源的频率调谐功能,故大多数单频激光的反馈式线宽压缩技术无法直接应用于扫频激光的线宽压缩及扫频非线性补偿.

图4 反馈式与前馈式激光线宽压缩方案示意图Figure4 Sketch of feedback-typeand feedforward-type laser linewidth reduction scheme
作为与反馈式线宽压缩技术相并列的另一类技术方案,前馈式激光线宽压缩技术[12-13]能够较好地解决激光线宽压缩时需激光器具有直接相位调谐能力与输出频率选择自由度的问题.典型的反馈式与前馈式激光线宽压缩系统的结构如图4所示.与反馈式结构不同的是,前馈线宽压缩方案中光源输出被分为两路,一路进入具有相位调制能力的光调制器,另一路进入参考光学系统(如延时零差M-Z 干涉结构)以提取激光的相位波动.与反馈式系统不同的是,前馈式系统中提取出的激光相位波动并不用于控制激光器自身,而是用于控制光调制器,使其对光源输出光进行与相位波动完全相反的相位调制以实现相位噪声的消除.进一步地,系统中对光相位的控制由外部调制器实现,相位调谐的精度与速率由调制器及控制电路决定,因而可突破激光器直接调谐响应速度与调谐精度的限制.另外,受益于分支-合并的开环控制结构,系统中各个环节的时间延迟并不限制相位调谐的速率,只需保证系统中两分支各自的延时相匹配即可.
2.2 前馈式扫频激光线宽压缩技术实现方案
为实现扫频DFB 激光器的线宽压缩,进而完成对π-PSFBG 的高精度解调,设计了图5所示的光纤传感系统.系统中待进行线宽压缩的激光器为商用1 550 nm 分布式反馈半导体激光器(DFBL),其输出为慢轴线偏振光.激光器输出由光纤耦合器分为两束,其中一束经过长度约110 m 的单模光纤后进入声光调制器(acousto-optic modulator, AOM),声光调制器的中心工作频率(移频)为200 MHz.由保偏光纤耦合器分出的另一束光进入正交非平衡M-Z干涉结构.该正交非平衡M-Z 干涉结构由等分光比光纤耦合器、长度为4 m 的延时光纤、90°光桥[14](90°optical hybrid)构成由于90°光桥要求的输出光为固定线偏振态,因此整个干涉结构和前级的光纤耦合器均须由保偏光纤元件实现.这里的正交非平衡M-Z 干涉结构等效于两完全相同但其中一个额外引入了90°相移的非平衡M-Z 干涉仪.按照90°光桥的端口对应关系分组后,两干涉仪输出端分别由两个平衡光电探测器(balanced photo-detector, BPD)进行差分平衡探测.
两路平衡光电探测器的输出信号由两路高速模数转换器(A/D)获取后,以数据流的形式进入可编程数字控制器(FPGA).FPGA 根据获取的数据流执行数据处理算法后生成相应的控制指令流,通过数字接口实时控制射频信号发生器.这里的射频信号发生器为基于直接数字合成技术[15](direct digital synthesis, DDS)的集成电路,可根据收到的数字控制指令实时调节输出射频信号的频率、相位、幅度.射频信号发生器输出的信号经射频放大器后,对声光调制器进行驱动,完成对激光相位的前馈控制.
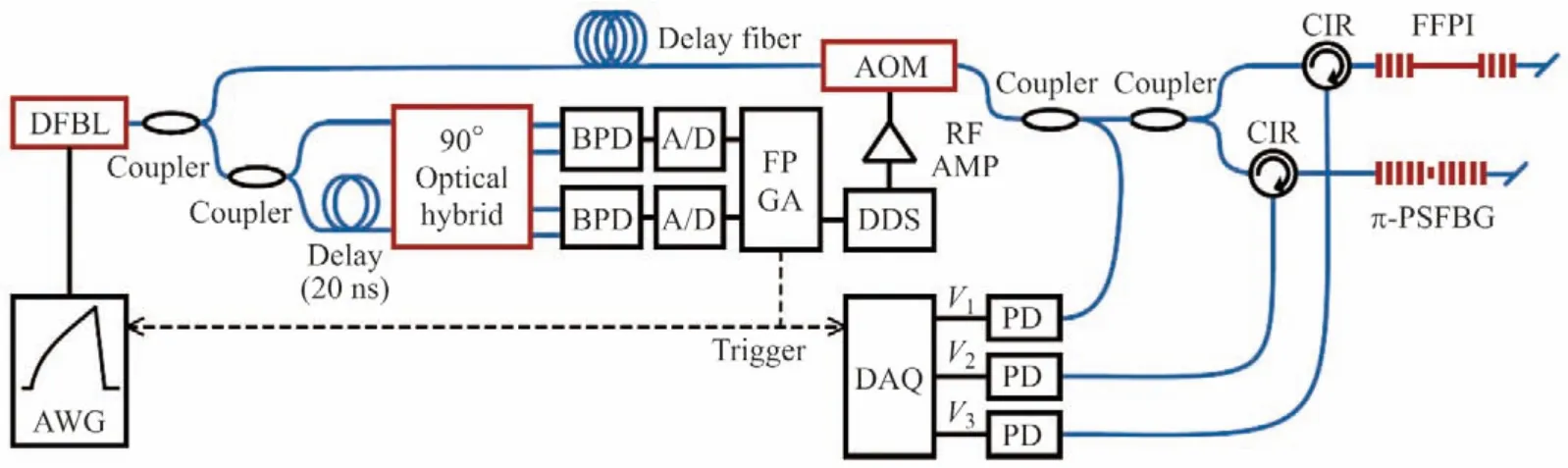
图5 基于扫频激光前馈线宽压缩技术的光纤应变传感器框图Figure5 System diagram of feedforward frequency-swept laser linewidth narrowing scheme based optical fiber strain sensor

式中,Gt、Rp、I0分别为平衡光电探测器的跨阻放大系数、光电响应系数、入射光功率;τ=20 ns为非平衡M-Z 干涉仪两臂间延时.平衡探测器的输出Sx与Sy由高速ADC 采集至数字域,由FPGA 进行流式处理.FPGA 中通过直角坐标/极坐标转换[16],得到t时刻激光相位与t-τ时刻下激光相位的差值为

由三角波驱动电流使DFB 激光器输出扫频激光时,激光器有源区温度变化将影响输出光频率,故需对激光器的三角波驱动电流进行适当的预畸变,使其实际输出激光为近似线性扫频光.经前馈线宽压缩的扫频光被分为3 束,其中一束直接由光电探测器接收,记该光电探测器输出电信号为V1(t);另外两束各自经光环行器后分别入射至π-PSFBG 与FFPI.两者的反射光信号再次回到后光环行器后,由另外两个光电探测器接收并分别记输出电信号为V2(t)和V3(t).光电探测器的输出电信号由数据采集卡获取;扫频光源、前馈线宽压缩系统和数据采集卡同步触发构成典型的扫频光源式传感系统,信号V2(t)/V1(t)与V3(t)/V1(t)经幅度归一化与时间-频率换算后分别对应π-PSFBG 与FFPI 的反射率谱线.为补偿环境温度变化与激光器初始波长漂移,在选取π-PSFBG 作为应变传感元件的同时,引入额外一路FFPI 并使其松弛放置于π-PSFBG 附近.待测应变信号施加于π-PSFBG,通过获取的π-PSFBG 谐振频率与FFPI 某个谐振频率的差值,即可测量应变信号.
2.3 前馈式扫频激光线宽压缩技术用于应变传感的实验结果
经前馈式线宽压缩后的DFB 扫频激光器对π-PSFBG 进行解调的结果如图6所示.系统中激光器的扫频范围为50 GHz.由图6(a)中结果可见,该扫频光源能够获得π-PSFBG与FFPI 工作波段的完整谱线,π-PSFBG 的单个谐振峰位于相对扫频初始频率约25 GHz处,FFPI 的谐振峰周期性分布于18~34 GHz 范围之间.π-PSFBG 与FFPI 这两类谐振型传感元件的其谐振峰宽度极窄,因此对扫频激光的线宽和扫频非线性等导致光频率随机波动的影响极为敏感.图6(b)为前馈线宽压缩关闭时某次扫频得到的π-PSFBG 与FFPI 反射谱线的细节情况.可见,由于DFB 激光器输出扫频激光时的本征线宽较高,其频率波动导致测得的π-PSFBG 与FFPI 的谐振峰均表现出了明显的畸变,解调效果严重恶化.相比之下,经前馈线宽压缩后扫频探测光进行一次扫描时得到的π-PSFBG 与FFPI 谐振峰谱线如图6(c)所示,观察到的清晰的谐振曲线表明引入前馈线宽压缩的技术方案能够有效地提高基于DFB 激光器的扫频式传感系统的应变测量分辨率.
为考察最终的应变测量分辨率,将π-PSFBG 与FFPI 松弛放置于同一隔离环境内,由传感系统连续执行扫描探测并连续记录100 次的谐振频率差读数.根据π-PSFBG 的应变灵敏度系数kε= 133.8 MHz/με(1.07 pm/με),将所得频率读数转为应变后的结果如图7所示.计算该组数据的标准差可得应变测量分辨率δε= 0.53 nε,实现了优于nε级分辨率的高精度应变传感.FFPI 的有效频率区间为18~34 GHz,覆盖频率范围为16 GHz(0.13 nm),对应测量范围为0.12 mε.
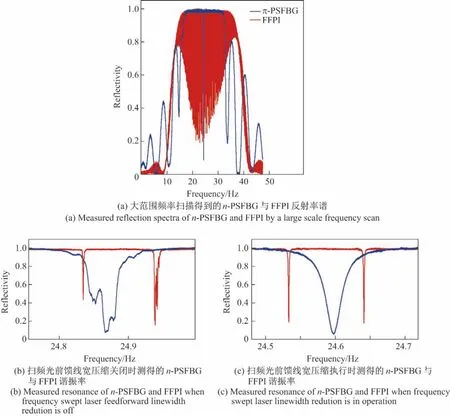
图6 解调系统测得的π-PSFBG 与FFPI 反射谱Figure6 Measured reflection spectra of π-PSFBG and FFPI by the demodulation system
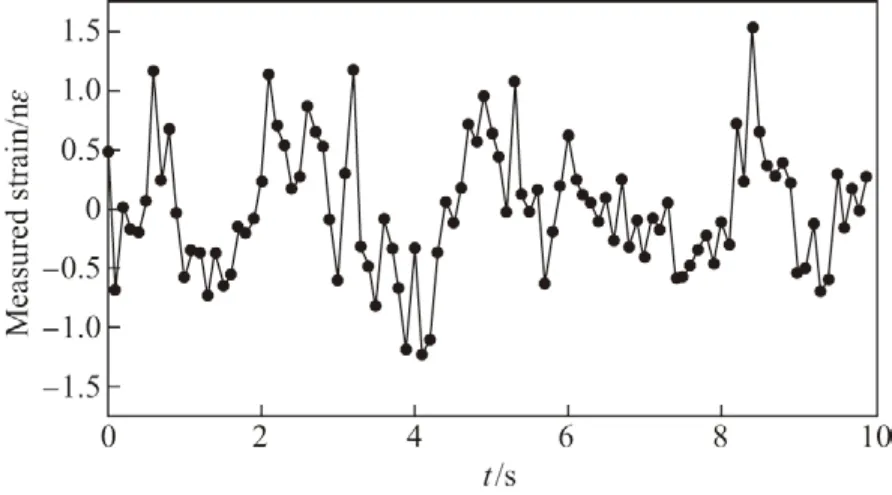
图7 π-PSFBG 的应变测量结果(以FFPI 为参考元件)Figure7 Strain measurement result with π-PSFBG (FFPI as reference)
3 闭环轮询式探测技术用于FFPI 阵列高精度解调
3.1 闭环轮询式探测技术中的FFPI 差频脉冲鉴频法
在实际应变测量场景中,对应变传感器的要求不仅体现在分辨率、测量范围、采样率等测量指标上.实际观测中希望获取的有效信息通常是多个位置或多个方向上的多通道信息,因此还要求应变传感系统具备一定数目的多通道测量能力,即阵列式应变传感.针对应用场景对应变传感器在测量精度与阵列规模两方面同时提出的需求,本文提出了基于闭环轮询式探测技术的FFPI 阵列高精度解调方案.
闭环轮询式探测技术利用了FFPI 的差频脉冲式鉴频法.这里的鉴频指由解调系统向敏感单元(FFPI)发送探测光信号,并根据敏感单元反射回的光信号提取出其(某个谐振峰的)谐振频率的过程.图8给出了FFPI 的差频脉冲鉴频法示意图,设待测FFPI 在频率ν0处存在谐振峰,解调系统发出用于探测FFPI 的前后两个激光脉冲的光频率分别为ν′与ν′′.为方便描述,记ν=(ν′+ν′′)/2(即ν′与ν′′的中值)为中心探测光频率,νd=(ν′′-ν′)/2 为探测光频差,且有ν′=ν-νd与ν′′=ν+νd.解调系统探测FFPI 时,若中心探测光频率ν小于谐振频率ν0,则ν′′相比ν′更接近ν0,前一反射脉冲的总能量大于后一反射脉冲总能量,两者之差为正;相反地,当ν大于ν0时,两反射脉冲的能量差值为负;ν与ν0重合时,两反射脉冲完全相同,其能量差值为零.
根据上述描述,可定义频偏信号D(ν)为两反射脉冲能量差值,其实际曲线如图8所示,特征与Pound-Drever-Hall 鉴频技术[17]中的误差信号[18]类似.D(ν)曲线的过零点对应FFPI 某个谐振峰的中心频率且在过零点附近单调变化.当ν足够接近ν0时,D(ν)与ν-ν0近似呈正比关系,其比例系数即频偏信号曲线过零点处的斜率K.在此情况下,根据当前某次探测所获取的频偏信号D(ν)即可得知解调系统的探测光频率与敏感元件(FFPI)的谐振频率之差值ν-ν0=K-1D(ν).

图8 FFPI 的差频脉冲探测式鉴频法示意图Figure8 Illustration of frequency-differenced pulse pairdiscrimination scheme of FFPI
3.2 闭环轮询式探测技术的系统实现方案
基于闭环轮询式探测的时分复用式高精度光纤应变传感器阵列的系统硬件结构如图9所示.系统主光源为窄线宽单频激光器,输出的激光首先经光环行器(CIR)进入声光调制器(AOM).声光调制器的另一端接全反射镜,使该端口输出的激光再次回到声光调制器并从原输入端口返回.声光调制器返回的激光被光纤耦合器分为功率不等的两束,其中功率较小的一束直接由光电探测器(PD1)接收,将光功率转为电信号;而功率较大的一束经另一光环行器后作为探测光进入传感单元阵列.传感单元阵列部分由延时耦合器阵列与多个FFPI(传感单元)构成.延时耦合阵列由分光比不等的1×2 光纤耦合器与多段相同长度的延时光纤依次前后连接组成,而各个FFPI 连接于延时耦合阵列的输出端.传感单元阵列返回的光信号再次经光环行器后被另一光电探测器(PD2)接收.
传感系统的控制电路部分以FPGA 为核心,作为整个系统的实时控制模块(real-time control module).控制电路中的两个模数转换器(A/D)采集光电探测器输出的电信号并被FPGA 实时获取.同时FPGA 控制信号发生器(signal generator, SG)输出相应的射频信号,该信号发生器为基于直接数字频率合成(direct digital synthesis, DDS)原理的集成电路,能够进行幅度键控(射频脉冲生成)与输出频率的实时控制.信号发生器的输出射频脉冲信号,经射频放大器(RF-AMP)放大后驱动系统光路中的声光调制器.
系统中除激光器之外的部分构成闭环回路.图9为闭环系统的控制流程与信号时序示意图.FPGA 控制信号发生器生成一定频率的射频脉冲信号以驱动声光制器.声光制器受射频脉冲信号的驱动,同时对激光进行移频与脉冲生成.由于声光调制器能够在其最佳驱动频率附近一定范围内的驱动频率下正常工作,因此,可以通过控制其驱动信号的频率来实现对激光移频频率的控制.考虑到声光调制器为互易元件工作时输入/输出方向并无限制,因此系统将光环行器及高反射镜加至声光调制器的两端使激光两次通过调制器并被两次移频,从而可将声光调制器的移频调节范围扩大到原来的2 倍.
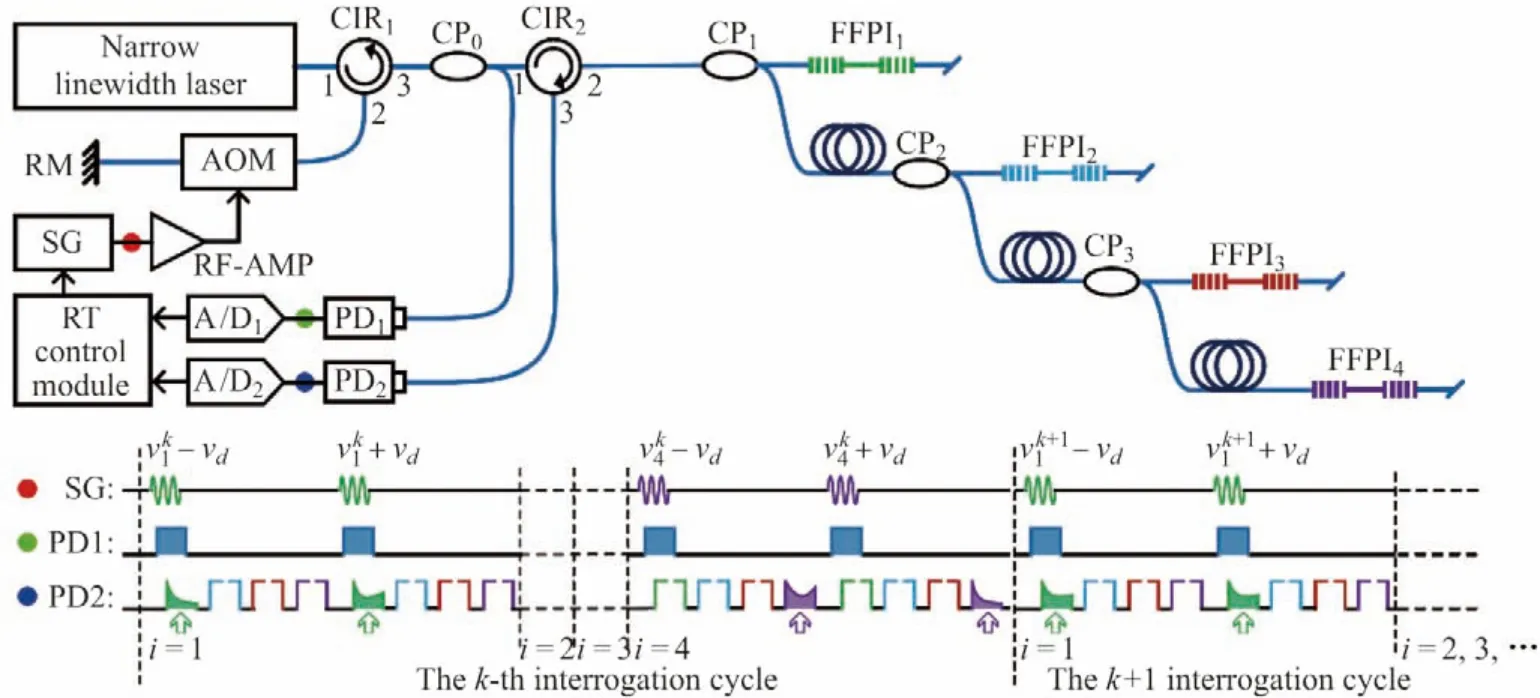
图9 基于闭环轮询探测方案的光纤应变传感器阵列系统框图与信号时序Figure9 System and signal sequence diagram of closed-loop cyclic interrogation scheme based optical fiber strain sensor array
3.3 闭环轮询式探测技术的控制与信号处理流程
由于各FFPI 的谐振频率各不相同,无法在一次探测中使探测光频率ν落在所有传感单元的谐振中心附近.因此采用闭环轮询探测技术实现对所有FFPI 谐振频率的高精度解调.为方便描述,定义N为系统中传感单元总数,i=1,2,···, N为各传感单元标号,其数值随时间循环.k= 0,1,2,···表示当前进行的轮询探测的周期数,每完成一次轮询探测后其值增加1.表示第k轮循环中对第i个传感单元进行探测时的中心探测光频率,表示第k轮循环中对第i个传感单元进行探测的过程中探测光频率为ν时所得的鉴频信号.
为了得到闭环轮询探测的初始状态,在执行闭环轮询探测之前,须对所有传感单元执行一次初始扫描,即令ν从其下界开始以足够精细的间隔步进至上界.对每次步进的ν执行一次双脉冲探测,并根据探测结果计算当前各通道的鉴频信号幅值,从而得到所有传感单元完整的鉴频信号曲线.从扫描结果中可得到所有传感单元大致的谐振中心频率,记为这里轮询探测周期数k= 0 表示各个的起始值,从而使得首轮探测中对每个FFPI 的探测光频率均在其谐振频率附近.此后即开始执行轮询探测.首个轮询探测周期中(k= 1),执行N次双脉冲探测,依次对编号为i的传感单元执行中心探测光频率为的双脉冲探测,可相应地得到N个鉴频信号根据得到的可分别计算出首轮探测中探测第i个传感单元时中心探测光频率与传感单元谐振中心频率的差值为

式中,Ki表示第i个传感单元的鉴频信号在谐振中心处的斜率,其数值可通过计算初始状态扫描时得到的各传感单元的完整鉴频信号曲线过零点处的斜率获得.最终可得在首轮闭环探测中各FFPI 的精确谐振中心频率为

每当一轮闭环探测完成后,下一轮的闭环探测立即开始执行.对于第k轮闭环探测,各传感通道的中心探测光频率并不使用初始值,而是使用上一轮探测中得到的当前谐振中心频率来执行对N个传感单元的下一轮探测并计算新的为

该过程等效于在N个反馈回路中分别根据得到鉴频信号不断调整中心探测光频率,使其始终跟随传感单元的谐振中心频率,即实现了多个传感通道的时分闭环轮询式探测.在闭环探测不断执行的过程中,各传感单元上的应变变化将导致各自的谐振中心频率不断变化,但中心探测光频率始终跟随谐振中心频率.因此,记录下随k不断增加过程中的N个时间序列可得到N个传感单元的谐振中心频率随时间变化的曲线,再分别除以其应变灵敏度系数,最终获得所有FFPI 上的应变信号.
3.4 闭环轮询式探测技术实现应变传感的实验结果
图10给出了各应变传感通道的时域测量结果(FFPI4松弛放置作为温度补偿通道).图10(a)为由电控精密位移平台向FFPI1施加幅度为0.1 μεp-p、频率为10 Hz 的应变信号时传感通道1 的实测结果,可观察到清晰的正弦波型且其幅度/频率与实际信号一致.图10(b)~(d)分别为FFPI1~FFPI3上施加固定应变时相应各传感通道的实测结果.测得的应变曲线变化平稳,波动保持在-0.1~0.1 nε之间.计算整段测量结果的标准差可得各传感通道在1 Hz 测量频率下的应变测量频率分别为δε1= 3.9×10-11ε、δε2= 5.5×10-11ε、δε3= 6.0×10-11ε,均优于亚纳应变(10-10ε)级.
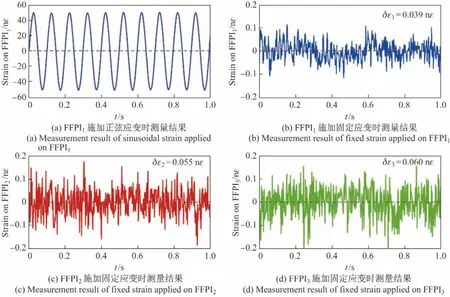
图10 传感系统实测的各通道应变信号时域曲线Figure10 Time domain strain measurement results of each channel in the sensing system
最后简单讨论闭环轮询式探测技术实现FFPI 阵列高精度解调的应变测量范围与阵列规模.当解调系统的光移频控制范围大于FFPI 的自由光谱范围时,各传感通道的应变测量范围将不受解调系统的限制.在长期观测中,若某个FFPI 上所施加应变持续增大(或持续减小),该FFPI 的待测谐振峰将相应地持续向同一方向移动,直至即将超出光移频控制范围.此时,由于光移频控制范围大于FFPI 的自由光谱范围,在整个光移频控制范围内将出现该FFPI 与当前待测谐振峰相邻的另一谐振峰.在这种情况下,该传感通道的下一个轮询周期中解调系统设定光移频频率值时,向其额外加入(或减去)FFPI 自由光谱范围的数值即可立即完成待测谐振峰的切换,从而保证应变测量结果连续.因此,由闭环轮询式探测技术对FFPI 进行高精度解调时,测量范围仅受限于FFPI 自身的工作频率(波长)范围.当FFPI 高反射区谱宽为0.4 nm 时,相应的应变测量范围可达0.4 mε.
闭环轮询式探测技术在进行敏感单元的时分复用解调时,由于脉冲式探测不要求光路状态恒定不变,该解调方式能够兼容基于光切换开关的空分复用技术,进一步扩展传感器阵列的规模.引入光切换开关后的传感器系统结构如图11所示,由光切换开关实现8 通道空分复用,各空分通道均包含5 路时分复用通道,共可实现总通道数为40 的传感单元阵列.考虑到光开关的通道切换速率通常远低于声光调制器的频率切换速率,在执行闭环轮询探测时,时分通道的切换优先级应高于空分通道的切换优先级.即当探测某个空分通道时,控制系统对该空分通道上的所有时分通道执行若干次闭环轮询探测,探测完成后切换至下一空分通道并循环重复上述过程.由于通常情况下待测应变信号的频率远低于解调系统能够提供的脉冲探测重复频率,引入光切换开关式空分复用方案后系统的反馈速率仍能够保证所有传感通道均能够实现分辨率优于nε级的应变测量.
4 高精度光纤应变传感器于地壳形变观测场景中的应用
本文所涉及的各解调技术能够实现优于nε级分辨率的高精度应变测量,同时因实现方案均基于通用光电器件,使系统的整体稳定性较高,便于在实际场景中应用.本节介绍基于闭环轮询式探测技术的高精度光纤应变传感系统在地壳形变观测场景中的应用.
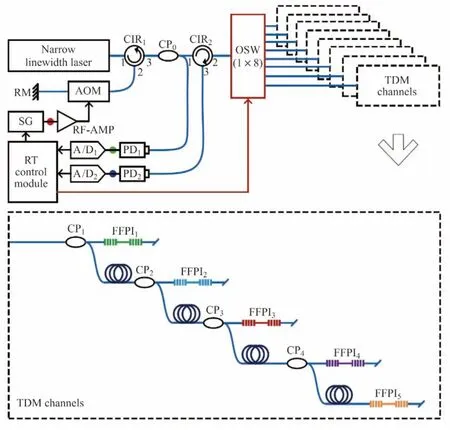
图11 基于闭环轮询探测方案的光纤应变传感器阵列的进一步扩展方案Figure11 Expansion scheme of the closed-loop cyclic interrogation scheme based optical fiber strain sensor array
在地球物理学研究中为探索地质构造运动、地震形成过程等科学问题,需进行地壳形变观测,其中重要工作之一是对地质活跃的特定地区地壳应变进行高精度连续测量.在该场景下,要求应变传感器具备nε级以上精度的测量能力,并能够支持多个观测点及同一观测点处多个方向的应变测量.为此,将基于闭环轮询式探测技术的高精度光纤应变传感器布设于四川省泸定县燕子沟地震台,此处位于四川省三大主要断裂带交汇处,所在区域地质活动较为频繁,具备较好的观测条件.布设在此处不仅能进行实际的地形变观测,还可以考察仪器在实地条件下的性能表现及可靠性.如图12所示,每个地形变测量位点安装有传感系统的独立空分通道中的5 个时分传感通道,包含4 路呈“米”字型方向布设的应变传感单元和1 路温度参考单元以实现二维应变张量观测.
为使地形变完全耦合至光纤敏感单元,需要施加光纤敏感单元安装方案.首先应保证地壳基岩可直接接触;然后为水平安装光纤敏感单元,在基岩平面选取合适点位后打孔安装垂直金属桩并将金属桩紧密固定至基岩.垂直金属桩可按不同高度横向安装水平基座,不同金属桩上的水平基座两两构成一组,光纤敏感单元两端分别固定于同一组的两个水平基座上.敏感单元安装时需预先张紧(作为温度参考元件的敏感单元松弛放置),完成安装后还需对敏感单元所在区域进行密封以保证其内部温度均匀恒定,实际效果如图13所示.

图12 现场观测实验选址及传感系统安装方案Figure12 Field experiment location and setup scheme of the sensing system

图13 现场观测实验中传感器安装位置现场照片Figure13 Final setup of the sensor arrayin the field experiment
传感器安装完成后需要等待一段时间,待探头安装区域的环境温度进入均匀稳定状态后即可进行地壳形变的实际观测.系统正式运行一周内即捕获到一次较强震事件.其震中距观测场地距离约140 km;两次较强震的震级分别为M3.1 和M3.4.图14给出了上述M3.4 级地震发生时的地形变短时观测结果.从图14(a)所示的震发时刻前后100 s 内的数据可清晰观察到震发时数Hz 级频率的地应变信号,与地震仪可捕获的地震波信号特征一致.图14(b)为地应变信号快速变化期间1 s 时长的测量结果,由于传感器采样率达200 Sa/s,能够捕获地应变信号的高频细节,这表明该系统具备与地震仪相当的频率响应上限,能够获得完备的高频地壳应变变化信息.
对地壳形变观测场景而言,更重要的是传感器具备极低频率/静态应变信号的测量能力,其重要标志为能够捕获周期为半/全日的地壳固体潮信号,这也是进行地壳形变观测时要求传感器必须具备的能力.图15给出了传感器某个通道的长期观测记录原始数据及滤波后数据,从中可清晰观察到幅度为30~50 nε的固体潮信号,这表明基于闭环轮询式探测式解调方案的光纤应变传感系统具备高精度应变测量能力.
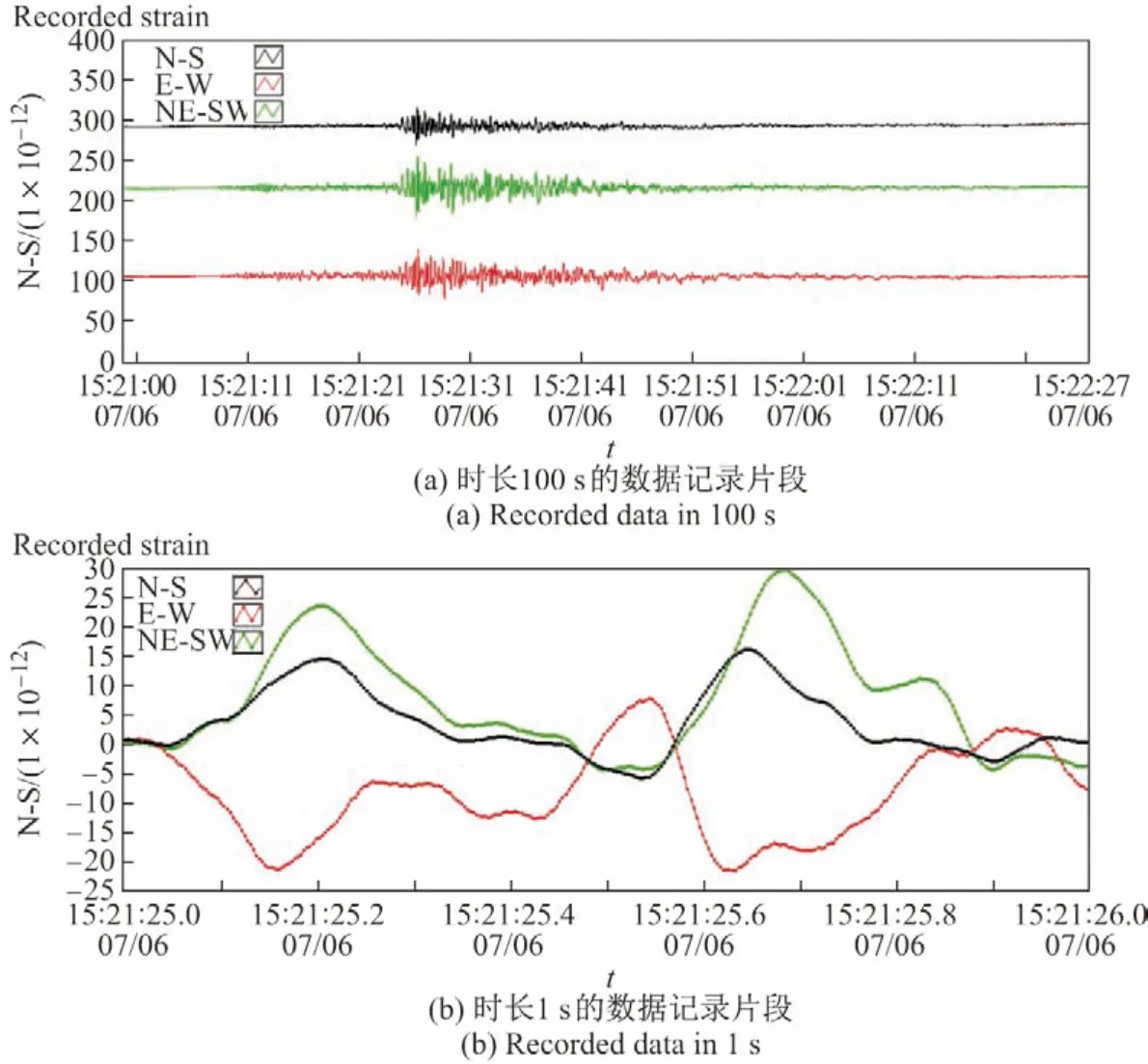
图14 震发时刻的短期观测数据Figure14 Acquired short-term data at time of an earthquake

图15 长期观测过程中的固体潮数据Figure15 Observed solid earth tide during long-term measurement
5 结 语
本文主要对nε级高精度光纤应变传感技术进行了阐述与讨论.通过介绍高精度光纤应变传感器的基本机制与设计思路,引出作为敏感元件的π 相移光纤光栅与光纤光栅F-P 干涉仪.针对这两类谐振型光纤敏感元件,详细阐述了近年来提出的两种新型解调技术方案,即前馈式扫频激光线宽压缩技术方案与闭环轮询式探测技术方案,并在最后给出了基于以上技术方案实现的高精度光纤应变传感器在地壳形变观测场景中的应用.实验结果表明,所阐述的解调技术方案具备实现优于nε级精度的应变测量能力;根据实际应用中所取得的效果,也进一步验证了所述技术方案的可行性与实用性,能够为高精度光纤应变传感技术的进一步研究提供参考.
此外,所阐述的技术方案可不局限于高精度光纤应变传感技术领域,对其他各类光纤传感技术,特别是涉及波长编码型传感元件、光谱分辨率提升、扫频激光探测、传感单元阵列化等方向的研究工作,也具备一定程度的参考价值.
