基于“当前”统计模型的变结构交互多模型算法
2020-04-02傅虹景于守江劳丹涤
傅虹景,于守江,吉 峰,劳丹涤
(上海航天电子技术研究所,上海 201109)
0 引言
机动目标跟踪问题是现代雷达数据处理系统中的难点,原因在于目标运动方式的不确定性[1-3]。目前,卡尔曼滤波算法是目标跟踪问题中应用较为广泛的算法[4-5],但是受限于目标的运动方式只能用单一的模型来描述。若单一的模型无法匹配目标的机动性时,通常会出现滤波器的估计精度下降,甚至发散或丢失目标的现象[6-7]。为此,基于卡尔曼滤波的多模型算法被提出[8-9]。
交互多模型(Interacting Multiple Model,IMM)算法是目前多模型算法中应用较为广泛的算法[10-12],通过不同的模型来描述目标的运动方式,然后并行滤波,综合加权得到目标的状态估计。但是IMM算法的估计性能很大程度上依赖于所选取的模型集合,为了提高机动目标的跟踪性能,应当增加更多的模型来匹配目标的机动性,然而增加模型不仅会导致计算量增加,而且会使模型之间的竞争更加激烈,进而导致算法的估计性能下降[13]。为此,变结构IMM(Variable Structure IMM,VSIMM)算法[14]被提出,如模型组转换法[15]、自适应网格算法[16]、有向图算法[17]和期望模式扩展算法[18]等。VSIMM算法能使模型集合动态更新,相较于IMM算法有更好的自适应能力。
“当前”统计(Current Statistical,CS)模型是一种非零均值时间相关模型[19-20],该模型认为目标下一时刻的加速度是满足修正的瑞利分布,可以跟踪机动性较强的目标,但是其性能受到最大加速度参数的影响,对于机动性较弱的目标跟踪性能较差[21-22]。本文给出了一种基于CS模型的VSIMM算法,在自适应网格IMM算法的框架下,根据加速度的一步预测结果,自适应调整CS模型中的最大加速度参数。仿真结果表明,相较于固定结构的IMM算法,VSIMM算法对目标的估计精度更高,跟踪性能更好。
1 CS模型
CS模型是一种非零均值时间相关模型,它假设目标以某一加速度机动时,下一时刻的加速度取值范围有限,而且总在“当前”加速度值的附近,所以加速度的概率密度函数用修正的瑞利分布描述:
(1)
式中,amax为目标加速度的最大值;a为目标的加速度;μ>0为一常数。

(2)
式中,x(k)为目标k时刻的状态向量;F(k)为状态转移矩阵;G(k)为输入控制矩阵;v(k)为零均值;协方差为Q(k)的过程噪声。当采用CS模型时:
(3)
(4)
(5)

(6)

(7)

由式(6)可以看出,加速度的方差由最大加速度和当前加速度的估计值决定,而当前加速度的估计值与滤波算法有关,所以CS模型的性能依赖于机动频率和最大加速度。对于固定参数的CS模型,存在以下缺陷:
① 当amax的取值较小时,CS模型的加速度方差较小,跟踪精度较高,然而跟踪的目标加速度变化范围较小,不能及时响应快速机动;当amax的取值较大时,CS模型的加速度方差较大,可以及时响应目标较大范围的机动,但是跟踪精度有所降低。所以amax如果在跟踪过程中不能自适应调整,将影响CS模型的性能。
2 基于CS模型的VSIMM算法
本文提出的基于CS模型的VSIMM算法借鉴自适应网格IMM算法的思想,设立3种amax参数不同的CS模型,根据当前加速度的一步预测值,自适应调整下一时刻的模型参数amax,算法流程如图1所示。
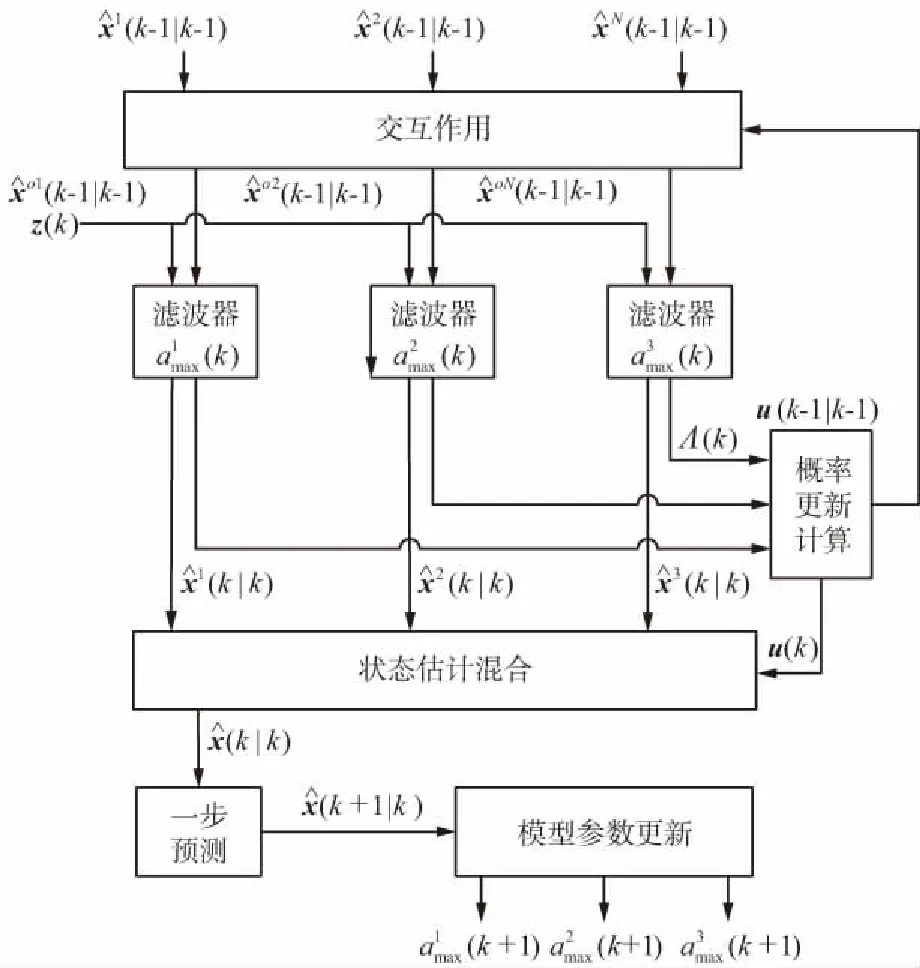
图1 基于CS模型的VSIMM算法流程Fig.1 Flow of VSIMM algorithm based on CS model
(8)
步骤1:状态估计的交互式作用

(9)
式中,
(10)
(11)
步骤2:并行卡尔曼滤波

步骤3:计算模型可能性

(12)
步骤4:更新模型概率
模型j的概率更新为:
(13)
式中,
(14)
步骤5:状态混合估计

(15)
(16)
步骤6:状态向量的一步预测


(17)

步骤7:模型参数更新
由于当前加速度的均值可以得到,那么下一时刻的加速度的取值应该在均值附近,根据状态向量的一步预测更新模型参数:
(18)
式中,σa为最小模型间隔。
(19)
以上即为基于CS模型的VSIMM算法的全部流程。
3 算法仿真与分析
以二维场景中单个机动目标为跟踪对象,将基于CS模型的VSIMM算法与固定参数的CS模型IMM算法进行了对比。
目标运动场景:目标起始位置状态为x(0)=(0 m 10 m/s 10 m/s20 m 0 m/s 0 m/s2)T,目标的运动轨迹如图2所示。
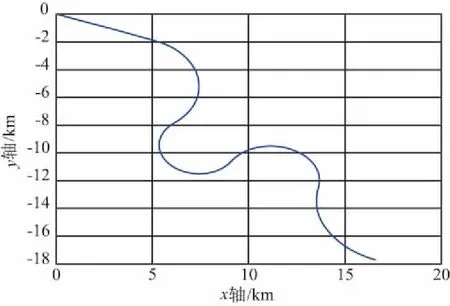
图2 二维场景中单个机动目标的运动轨迹Fig.2 Trajectory of maneuvering target in two-dimensional scenario

固定参数的IMM算法的参数同上。
传感器量测及其他参数:雷达的量测噪声为均值为0,方差为400 m2的高斯白噪声,采样间隔T=1 s,每次仿真步数200步。仿真结果由100次蒙特卡罗实验统计得到。
图3给出了不同跟踪算法下目标位置的均方根误差曲线,图4给出了目标速度的均方根误差曲线。由图3和图4可以看出,对于固定参数的CS模型IMM算法,其滤波结果的位置误差和速度误差相对较大,性能不如VSIMM算法。因此可以得出,对于参数自适应的CS模型VSIMM算法,目标的跟踪性能更好。

图3 目标位置均方根误差曲线Fig.3 Root mean square error of target position

图4 目标速度均方根误差曲线Fig.4 Root mean square error of target speed
4 结束语
本文针对机动目标跟踪问题,提出了一种基于当前统计模型的自适应变结构交互多模型算法,该算法根据滤波结果和状态预测信息,实时调整CS模型中是最大加速度参数,一定程度提升了CS模型对于弱机动目标的跟踪性能。仿真结果表明,该算法的位置和速度估计精度要优于固定参数的交互多模型算法。由于CS模型中另一个参数机动频率也对跟踪性能有影响,所以如何同时调整机动频率与最大加速度是下一步研究的工作。
