走航ADCP观测资料质量控制方法及应用
2020-04-01唐华亮聂红涛肖劲根
唐华亮聂红涛肖劲根
(天津大学 海洋科学与技术学院,天津300072)
声学多普勒流速剖面仪(Acoustic Doppler Current Profiler,ADCP)是一种基于多普勒效应的超声波测流设备。ADCP换能器向水体发射声脉冲,声脉冲经水中的颗粒物而发生散射。当散射回波被换能器接收时,通过比较发射波与散射回波之间的频率差(即多普勒频移),可推算出沿声束方向的水流速。水流相对于ADCP的速度在除去走航船速后,即可得到水流绝对速度。由于走航ADCP具有便捷、高效、测量范围大等优势,所以,国内外已普遍使用走航ADCP进行河流和海洋的流速观测[1-2]。
走航ADCP观测结果受很多因素的影响,未经处理的观测资料可能存在显著的误差,这些误差将影响观测资料还原真实的流场,从而导致观测资料价值下降,所以,若要得到真实合理的流速,需要对最原始的观测资料进行质量控制[3-5]。近30 a来,国内外学者对走航ADCP观测资料质量控制技术展开了研究:参考层法和基准流速法可有效地处理走航ADCP观测资料的船速数据[6-7];海水中声速变化对走航ADCP观测的流速结果产生的影响与声速修正的方法被讨论[8];走航观测中由于参考坐标系转换所引起的各类偏角误差以及校正方法被广泛研究[9-10];经过高频的回波信号平滑处理前后流速结果的对比,发现数据平均可有效地优化流速结果[11];“雪龙”号极地考察的走航ADCP观测数据处理问题也已被探讨[12-14]。
尽管在走航ADCP观测资料质量控制技术方面,国内外学者开展了许多研究[3-14],但是,目前仍尚未有研究针对走航ADCP观测资料质量控制提出规范的标准与完整的流程。这是由于以往研究[6-11]较多关注于单个或部分影响因素对观测资料的影响,而未从全面、完整的角度考虑观测资料质量控制,再者,又因走航ADCP观测本身受多种因素影响,例如,天气、海况等环境因素,观测船船体材质,观测仪器型号,观测海域海底质等,不同的观测资料可能需要考虑的影响因素也有所不同,所以,形成统一的数据处理规范和标准存在一定的困难。基于此,综合前人的研究成果,本文将从全面、完整的角度考虑所有影响因素,归纳针对不同影响因素的处理方法,提出一套针对走航ADCP观测资料的质量控制完整流程,以完善目前研究中尚未提出完整质量控制流程的不足,并以2017年夏季辽东湾红沿河核电站周边海域走航ADCP观测资料为例,进行应用与讨论。
1 走航ADCP资料质量控制流程
以往研究中,走航ADCP观测资料质量控制主要包括系统误差订正、GPS船速误差校正和常规检验[3],本文在此基础上,经过对各影响因素的整理、分类,将质量控制分为4个主要步骤,分别是船速处理、声速校正、偏角校正和剖面数据处理,从而将质量控制由相对抽象的概念具体化为一套结构清晰、简单易行的处理流程(图1)。此流程归纳了走航ADCP观测资料质量控制基本上所有需要考虑的因素,并且可以适用于不同的走航ADCP观测资料,例如观测资料的船速获取方式是底跟踪或者GPS,观测船为木船或金属船等,按照此流程基本上能够选择对应的处理方法,完成观测资料质量控制。
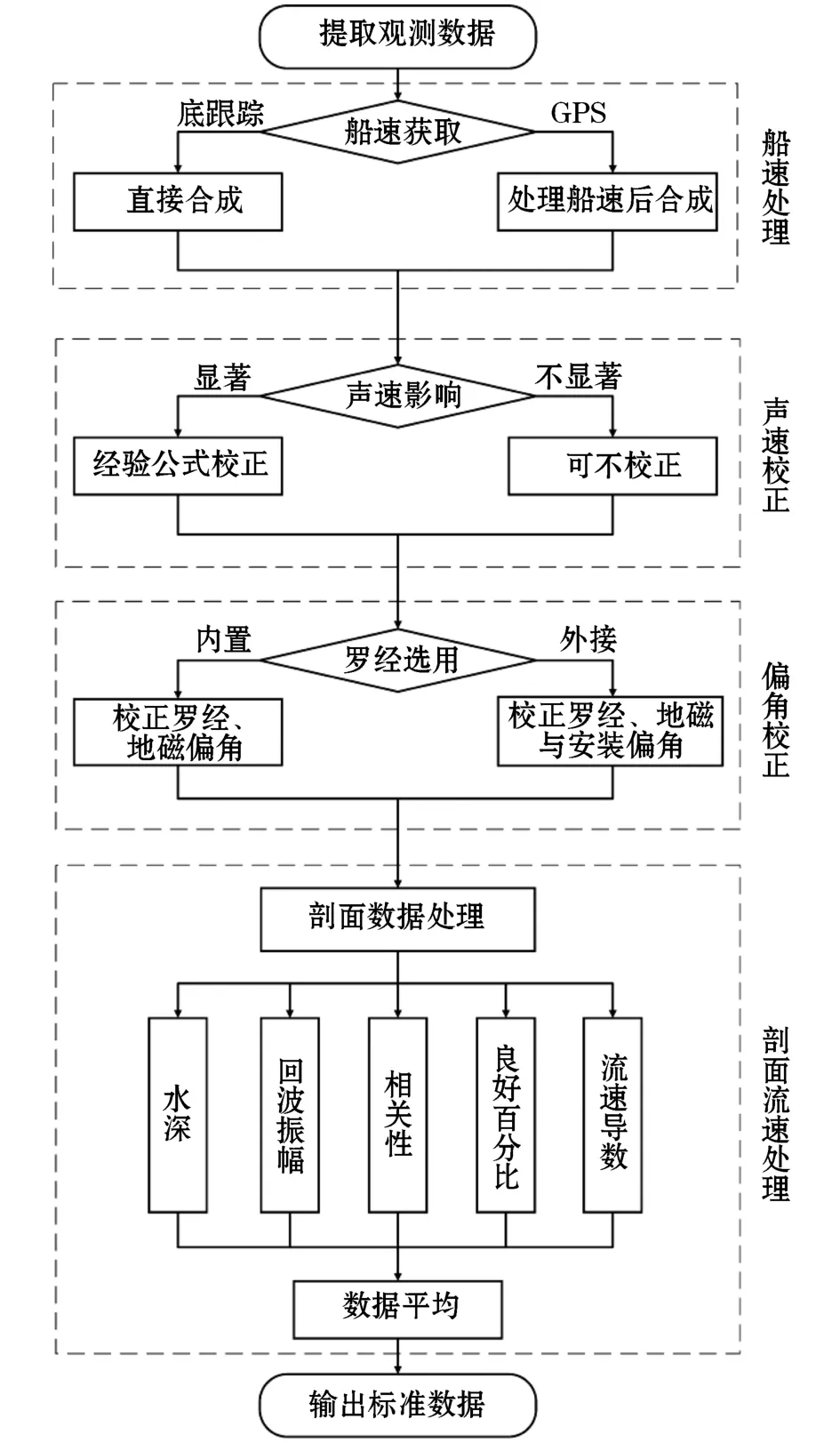
图1 走航ADCP资料数据处理流程Fig.1 Flowchart for data processing off shipboard ADCP
1.1 船速处理
基于多普勒效应,ADCP通过发射波与散射回波之间的频率差估算水体相对于船体的流速,即相对流速,再将相对流速与船速合成进而得到水体的绝对流速,可见船速获取是计算水体绝对流速的重要环节。通常采用底跟踪方法或GPS定位法来获取船速。底跟踪方法是通过发射声波遇到海底后反射回来的多普勒频移来计算船速的方法,由于底跟踪方法的随机误差与相对流速观测的随机误差匹配,二者合成得到的绝对流速能够消除它们的共模误差,因此底跟踪方法具有较高的精度[15]。但当观测点水深超出底跟踪信号范围或者观测点的底质为动底(砂质、泥质等)时,底跟踪方法将失效,此时就需使用GPS定位仪测量的经纬度位置反演船速。GPS定位法能够在底跟踪方法失效时代替其获取船速,但GPS定位仪易受测船的转向、仪器精度等影响,由此法获取的船速数据往往存在较大的误差。
在走航ADCP观测资料质量控制的第一个主要步骤即船速处理中,处理人员需要判断船速数据的获取方式。若利用底跟踪方法获取船速,可直接将船速与相对流速合成,得到实际流速;若利用GPS定位法获取船速,需要先处理船速数据,以降低船速数据的误差。处理船速数据的方法主要有参考层法和基准流速法,这2种方法均可有效地降低船速数据的误差,提高船速数据的精度[6-7]。
1.2 声速校正
使用ADCP走航观测时,操作人员需要在观测前设置仪器换能器位置处的海水声速值,在实际观测中往往设置一个固定的声速值,但由于海水是非均匀介质,海水声速会随着观测位置的改变而改变。海水声速的变化将会影响走航ADCP的观测结果。周翠翠[15]研究表明,当声速的变化量达到60 m/s时,流速的误差为0.01 m/s,且流速误差随声速的变化呈线性趋势。海水声速可以通过现场观测的温度、盐度和深度信息并结合经验公式推算,经验公式可采用Medwin提出的简化Wilson声速公式[16]:

式中,c为声速(单位为m/s),T为温度(单位为℃),S为盐度,z为深度(单位为m)。
走航观测前,先确定仪器的入水深度,结合对应深度处的温度和盐度,可采用式(1)计算仪器换能器位置处的声速。观测温盐变化较大的海域时,声速变化产生的影响较为显著,故需要多次结合温盐信息修正声速;观测温盐较为稳定的海域时,声速变化对观测结果的影响较小,此时声速不需要多次校准,取近似值便可。
1.3 偏角校正
走航ADCP观测的原始流速与真实的流速在方向上存在一定的偏差,即偏角误差,此误差主要是由观测数据从仪器坐标系转换至地球坐标系而产生[9-10]。目前,观测数据的坐标系转换主要有2种情况,分别对应于使用内置罗经或使用外接罗经来记录行船航向信息的2种方式。
当采用ADCP仪器内置罗经记录观测船的航向信息时,ADCP仪器的内置罗经将以地球磁场为参考坐标系,记录行船的航向信息。ADCP仪器自身再结合行船的航向信息将仪器坐标系下的观测数据转换至磁北坐标系下储存并输出,从而形成走航ADCP原始观测资料。当处理人员针对使用内置罗经获得的原始观测资料进行偏角校正时,需要考虑2种偏角,分别是罗经仪器自身的误差偏角即罗经偏角以及观测海域的地磁偏角。罗经偏角的测量方式:在走航观测时,采用GPS定位仪记录经纬度信息,根据经纬度反演观测船的航向,将其与内置罗经的航向进行比较,两者之差即是罗经偏角的大小。地磁偏角可以根据观测海域的经纬度推算得到。
在一些大型观测船上进行走航ADCP观测时,受金属船体影响,ADCP内置罗经不可使用,此时外接罗经可用来代替仪器的内置罗经记录观测船的航向。针对使用外接罗经获得的原始观测资料进行偏角校正时,除罗经偏角和地磁偏角外,处理人员还需要考虑仪器在安装的过程中波束1与波束3中心的连线与艏向之间的夹角,即安装偏角。安装偏角的测量方式:正式观测前,观测船先沿直线行驶并记录底跟踪的方向以及GPS的经纬度信息,比较底跟踪的方向和经纬度反演的航向,二者的夹角即为安装偏角。
处理人员在进行走航ADCP观测资料质量控制中的偏角校正时,通过观测船记录航向的方式可判断需校正的偏角误差的类型,当采用内置罗经时需要校正罗经偏角和地磁偏角误差,当采用外接罗经时需要校正罗经偏角、地磁偏角和安装偏角误差。在分别确定各类偏角的大小之后,无论采用内置罗经还是外接罗经,均可应用下式校正偏角,公式为

式中,u与v分别表示偏角校正后流速的东分量与北分量;u′与v′分别表示原始观测流速的东分量与北分量;当走航观测使用内置罗经时,α表示地磁偏角和罗经偏角的合成角;当走航观测使用外接罗经时,α表示地磁偏角、罗经偏角和安装偏角的合成角。
1.4 剖面数据处理
ADCP观测具有一定的随机性,同时,在观测的时候容易受测量环境的影响,如水体浊度、水中生物等。处理剖面数据时,需要针对不同的因素利用合适的方法剔除错误失效的数据,尽可能保留真实流场信息。
1)水深。ADCP在参数设置时,由深度分层和单元层厚度决定观测的深度范围,为了覆盖全部观测断面及满足底跟踪的使用,仪器的设置深度往往大于实际水深,导致ADCP记录了超过实际水深的数据,需要结合观测区域的水深信息进行剔除。
2)回波振幅。ADCP观测时各层水体对应的声信号散射强度,一定程度上反映了对应各层水体的浊度。若回波振幅过小,表明此部分观测水体中颗粒物较少,接收到的散射信号不够强,数据可信性略低。若回波振幅过大,则有可能是声信号接触到较大的固体介质,如水底、水中生物等,此部分为错误信号。在处理过程中要对回波振幅设置上、下两个合理的阈值,剔除此值过小和过大的部分数据。
3)相关性。它表示在ADCP观测时仪器自身记录的一个参考值。对应于每一个换能器,相关性越高,则表明这部分水体的观测数据可信度越高。
4)良好百分比数。它是仪器自身记录的一个参考值。对应于每一个换能器,通常为100或0。100表示这部分数据良好,0表示这部分数据失效。
5)流速导数。通常认为水体流速变化是连续的,在短时间内,ADCP高频观测中水体流动不存在极快速的变化。对流速观测结果求取导数,导数值较大的部分表明此处数据短时间内存在极快的变化,不符合水体流动规律,可设置合适的阈值,剔除部分流速导数过大的错误数据。
6)数据平均。未经平均处理的流速随机性较大,数据平均可以有效地平滑观测随机性,提高数据整体的合理性。目前,针对走航ADCP资料数据平均没有统一的规定和标准,可以在满足研究需求精度的情况下灵活处理。
2 走航ADCP资料质量控制应用
2.1 现场观测
观测区域与站位设置如图2所示。观测位置在辽东湾红沿河核电站周边海域,设置A(121°15'40″E,39°35'27″N)和B(121°10'40″E,39°36'46″N)两个站位。观测时间为2017-07-10T23:20—11T00:20。测船由 A站位驶向B站位,航速约为2.5 m/s。观测仪器为RTI公司(ROWE Technologies Inc.)300 k Hz ADCP,仪器精度为±0.70%。仪器通过一个不锈钢支架固定于右侧船舷,入水深度为1.5 m,盲区为0.5 m,观测资料的首层深度为2 m。仪器的采样间隔设置为1 s,共设置30个单元层,每层的深度为1 m。观测期间同时使用GPS(分米精度,10 cm)记录地理位置与航向信息。

图2 观测区域与站位设置Fig.2 Observation area and station location
2.2 质量控制
本航次观测区域水深为24~30 m,处在底跟踪可使用的深度范围内,同时此海域底质属于不动底质,满足了可以使用底跟踪方式的全部要求。在处理数据时,先将底跟踪记录的船速数据与水体剖面观测数据进行矢量合成,获得实际流速。
本航次开始走航观测之前,分别在A和B两个观测站位使用CTD观测当地环境,获取2个站位的温度与盐度信息。仪器的入水深度为1.5 m,在该深度上,A站位的温度为22.97℃,盐度为31.87;B站位的温度为25.94℃,盐度为31.77;参照式(1)可计算出A站位换能器阵位置处的声速为1 525.98 m/s,B站位换能器阵位置处的声速为1 533.20 m/s。在参数设置时声速设置采取二者平均值1 529.59 m/s,经分析,由A和B两个站位之间海水声速的不同,对结果产生的误差为±0.24%,该误差实际上显著小于仪器自身的观测精密度(±0.70%)。故声速校正时,仅采取固定值,不须再做过多的处理。
本观测量船为木船,采用ADCP内置罗经,使用底跟踪模式,观测不受安装偏角影响。通过仔细对比底跟踪与GPS记录的航向信息,发现底跟踪和GPS的航向较为一致,罗经数据准确。数据经过底跟踪船速与水体剖面数据矢量合成后,得到了在磁北坐标系下的水体流速。结合经纬度计算出当地海域的地理磁偏角约为-7°。参照式(2)和(3)对合成流速进行旋转校正,得到相对于大地经纬度的真北坐标系下数据。
剖面数据处理过程:
1)提取由底跟踪获得的水深信息,以水深为标准剔除超过水深的错误数据。
2)回波振幅的记录范围为43~128,经过多次试验,确定阈值上限100和下限60,剔除超过阈值限制的数据。
3)对于相关性、良好百分比数,本次观测海况较好,观测工作顺利,数据获取全面,整体质量也较高。相关性的记录范围为0.071 5~0.900 0,设置相关性阈值下限为0.7。良好百分比数为0或100,剔除所有该项为0的部分数据。
4)对于流速导数,本次观测仅考虑水平流速,分别对每一层的u和v分量流速数据求取导数,为比较大小对其取绝对值,生成绝对值序列。基于本观测数据,计算得到流速导数绝对值的变化范围为0~1.5,经多次试验,设置阈值上限为0.4,剔除超出阈值的不合理数据。
5)数据平均处理完成步骤1)~4)后,为了满足计算断面通量的研究需求,对走航数据进行30 s时间平均,得到最终质量控制后的流速。
2.3 处理结果
观测期间内走航ADCP垂向分层为30层,共观测3 337个剖面,u和v分量均获得92 859个原始数据。由与底跟踪船速进行矢量合成之后的绝对流速东、北分量(图3a和图3b)可以看出,未经后续处理的原始观测资料存在较多的噪声信息甚至错误值,例如,超过水深的错误数据、近水底附近2~3层观测数据、大量的随机信号误差等,可见原始数据并不能够完全真实地还原流场流速。经过偏角校正、剖面数据处理等,u分量共剔除21 882个无效或低可信度数据,保留70 977个可信数据,剔除数据占总数据23.56%;v分量共剔除24 105个无效或低可信度数据,保留68 754个可信数据,剔除数据占总数据的25.96%。通过对比经处理之后的流速东、北分量(图3c和图3d),能够清楚看到质量控制流程有效地排除了错误信息,同时也很好地保留了流场的真实特征。
选取10 m与15 m水深处的质量控制前后数据进行对比(图4),也可看出质量控制有效地剔除掉了部分远离真实流速值的错误数据。将流速信号平滑过滤,通过合成流速大小的频数分布直方图可进一步考查数据的离散程度,如图5所示。不难看出,质量控制前后的流速-频数分布均大致符合正态分布,这是由于ADCP观测过程中,每个剖面的观测都包含一定的偏差,这种偏差近似符合正态分布。尽管质量控制前后的结果都大致符合正态分布,即质量控制后的结果也存在一定的随机误差,但是,通过对比可以发现,质量控制后的数据,其流速变化的范围已经缩小,并且质量控制后的数据相比原始数据有逐渐向均值靠拢的趋势。总体来说,质量控制流程能够有效地消除远离真实值的错误数据,降低观测流速随机性的影响。

图4 10 m和15 m水深处原始数据和质量控制后数据对比Fig.4 Comparison of the current velocities at 10 m and 15 m before and after the quality control procedure
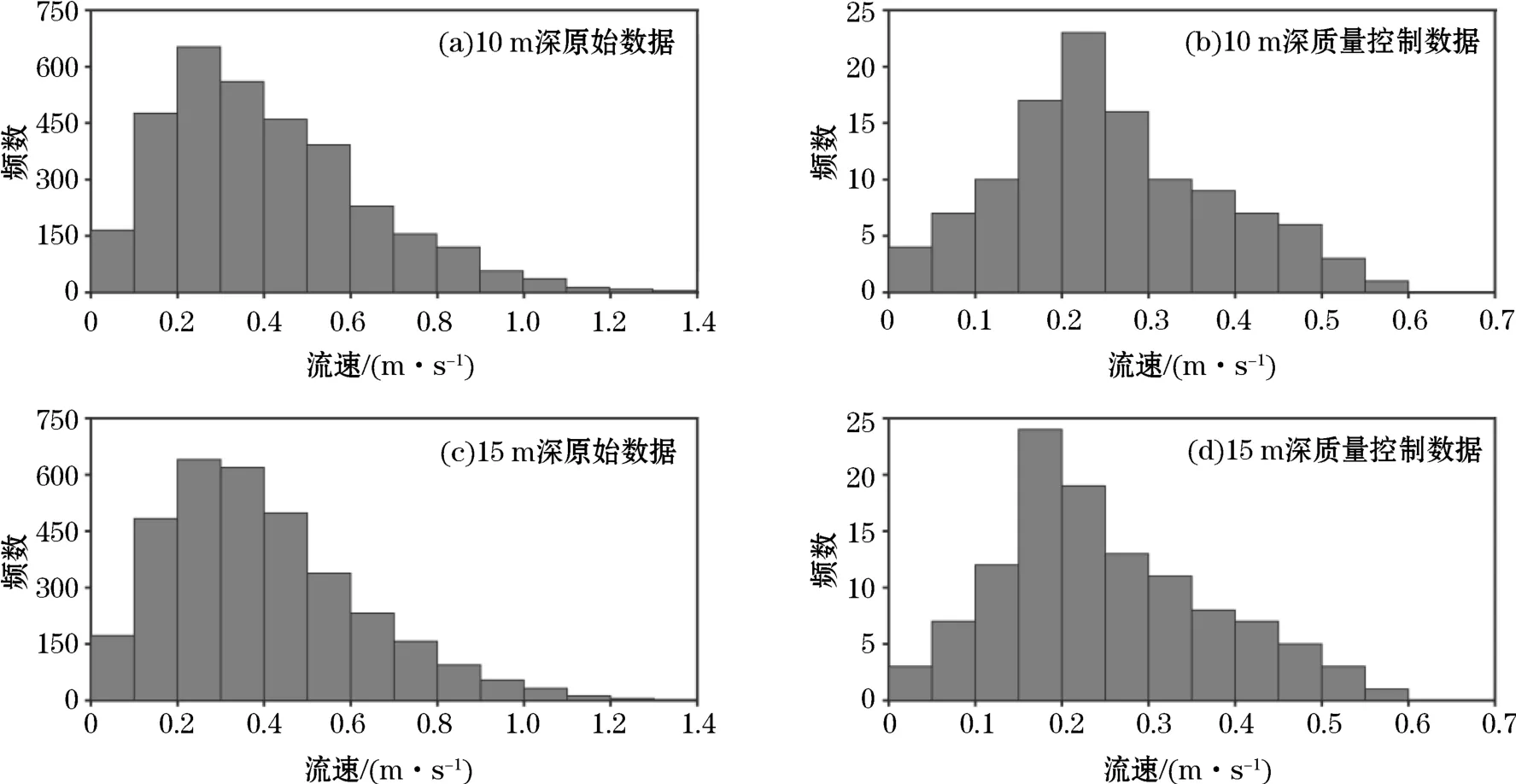
图5 10 m和15 m水深处原始数据和质量控制后数据的流速-频数分布Fig.5 Histograms of frequency vs.current velocity before and after the quality control procedure
3 结 语
本文在前人工作的基础上,提出了一套较为系统的走航ADCP观测资料质量控制方法流程。该流程包括船速处理、声速校正、偏角校正、剖面数据处理四个主要步骤。船速处理包括使用底跟踪和GPS两种方式下船速的处理方式;声速取决于观测当地环境如温度、盐度等,结合经验公式进行校正;偏角校正需要结合罗经信息的获得方式,当使用ADCP内置罗经时不受安装偏角影响,而使用外接罗经时要考虑安装偏角。地理磁偏角的校正取决于航向是相对于磁北坐标系还是真北坐标系,当航向相对于磁北坐标系时,需要推算观测当地的地理磁偏角,对磁北坐标系下的观测结果进行参考坐标系转换,得到相对经纬度的真北坐标系下的结果。剖面数据处理较为灵活,需要人为设置某些参数的阈值,一方面要确保剔除掉所有不合理、不真实的观测数据,另一方面要尽量保留更多的流场信息,为后续的研究工作做好铺垫与准备。
应用本文提出的流程对2017-07辽东湾红沿河取水口附近海域走航观测数据进行了质量控制,对u分量剔除了23.56%的低可信度数据,对v分量剔除了25.96%的低可信度数据。结果表明,质量控制流程有效地剔除了不真实的流速数据,如超过水深的数据、近水底若干层数据等,同时也降低了随机误差,得到更加符合真实情况的流速结果。通过实际应用,本文提出的走航ADCP观测资料质量控制流程具有良好有效性。