基于MED-EEMD和ELM的轴向柱塞泵松靴故障诊断研究*
2020-03-31刘生政曾祥辉王志坚
刘生政,张 琳,2,曾祥辉,兰 媛,2*,王志坚,程 珩,2
(1.太原理工大学 机械与运载工程学院,山西 太原 030024;2.太原理工大学 新型传感器与智能控制教育部(山西省)重点实验室,山西 太原 030024;3.中北大学 机械工程学院,山西 太原 030051)
0 引 言
柱塞泵是液压系统的重要部件之一,其具有强耐压、效率高、传输功率大等优点,但是它内部结构复杂、维护困难。同时,柱塞泵的工作环境相对恶劣,而且长时间处于高压和高速运转的工作状态,所以不可避免会出现各种故障,而这些故障信号通常都被强噪声信号所埋没,不易察觉,因此,对柱塞泵进行状态监测与诊断是系统正常运行的重要保证[1-2]。
柱塞泵常见的故障有松靴故障、配流盘磨损和滑靴磨损等故障。松靴故障是柱塞泵的主要失效形式,但由于在强噪声干扰下故障信号微弱和故障特征提取困难等一系列问题,成为柱塞泵故障诊断研究的重点和难点。松靴故障通常是由于制造或装配误差及柱塞泵在动作过程中的压力冲击,导致柱塞球头与滑靴间隙增大而产生的。柱塞泵缸体在转动过程中,柱塞在缸体中往复运动。当缸体转过一定角度时,经过上死点,柱塞进入吸油区,柱塞球头与滑靴发生一次碰撞;当缸体转动经过上死点后,柱塞球头与滑靴发生相对运动;当转过排油区时,高压油作用在柱塞上,使柱塞迅速向球头方向运动,从而又一次产生冲击。缸体转动一周,柱塞球头与滑靴发生两次碰撞,能量经过传动轴和轴承传递到壳体上,所以松靴故障的特征频率应为转轴频率的两倍[3]。
由于工作环境恶劣,采集到的松靴故障特征信息很容易被背景噪声所埋没,对其故障特征信号进行去噪从而提取到有效的特征量将成为问题的关键。近年来国内外学者针对柱塞泵松靴微弱故障开展了广泛的研究,小波分析[4]、经验模态分解[5]、变分模态分解[6]、自适应随机共振[7]等一系列信号处理方法已用于信号去噪和特征值提取中。其中由于小波基函数和阈值的选择不具有自适应性,小波降噪的效果受人为因素的影响;经验模态分解克服了传统包络分析中需要预先确定滤波器中心频带的难题,广泛应用于非线型、非平稳信号的分析,但是其不足之处是存在模态混叠现象。综上所述,在强噪声干扰的情况下,以上方法对柱塞泵松靴故障的微弱信号特征量提取表现不足,因此非常有必要寻找一种新的方法来抑制噪声的干扰,从而凸显故障特征,同时有效提取表征柱塞泵工作状态特征量。
基于上述问题,本文引入最小熵反褶积(MED),其出发点是寻求最优的滤波器使原信号的峭度值最大,抑制强噪声的干扰,让冲击成分更加突出,从而提高原信号的信噪比。集合经验模态分解(EEMD)是一种信号自适应分解方法,通过添加有限次的自适应白噪声以及计算唯一的余量信号获取模态分量,使得重构信号更加近似于原始信号。EEMD和经验模态分解(empirical mode decomposition, EMD)相比,EEMD表现出更好的鲁棒性和高效性,克服了EMD存在的分解不完整性、模态混叠和计算量大等缺点。
本文针对通过EEMD在强噪声环境下对松靴故障特征提取表现不佳,提出先用MED对振动信号降噪处理,然后对降噪信号进行EEMD分解,对得到的信号进行奇异值分解(singularity value decomposition,SVD),将得到的特征矩阵输入超限学习机模型(extreme learning machine, ELM),从而实现对松靴故障的诊断。
1 最小熵反褶积(MED)
MED是一种自适应系统识别方法,最早是由Wiggins提出,Sawalhi[8]在2007年首次将MED用于滚动轴承与齿轮故障诊断。MED的基本原理是解反褶积突出少数大的尖脉冲,根据峭度最大原理,峭度值越大表明信号冲击成分所占比例越多,该特性能更好突出冲击脉冲,因此,它对旋转机械冲击性故障的降噪处理非常适用[9]。
假设当柱塞泵滑靴发生故障时信号表达为:
y(n)=h(n)x(n)+e(n)
(1)
式中:e(n)—噪声;x(n)—滑靴故障的冲击序列;h(n)—传递函数;y(n)—振动信号。
由于环境噪声及传输路径的影响x(n)衰减为y(n)后失去源信号的特性,导致熵变大。解反褶积的目的是得到一个逆滤波器f(n),由输出y(n)恢复输入x(n)所具有的特性,即:

(2)
式中:L—逆滤波器f(n)的长度。
解反褶积是提取信号中较大的尖端脉冲成分,冲击特征越强,峭度值也就越大。将目标函数设置为信号x(n)的峭度最大化,即:
(3)
为了求得最优逆滤波器f(n),使目标函数K(f(j))的一阶导数为零。
MED寻找最小熵的算法可以归纳如下:
(1)初始化滤波器系数f∶f0=1;
(4)计算f(i)=A-1b(l)(式中:A—序列y(n)的L×L自相关矩阵);

2 集合经验模态分解(EEMD)
EMD是根据振动信号自身的时间尺度特征来进行分解,而且事先不需要设定任何参数,但是具有一定的缺陷,比如存在模态混叠现象。针对该不足,Huang[10]提出了EEMD方法,利用白噪声序列具有零均值、多次平均后被相互抵消的特点,有效改善了EMD分解产生模态混叠的弊端。具体分解步骤如下:
(1)在待分解信号R(t)中加入频谱均匀分布的白噪声am(t);
(2)对所得信号S(t)进行EMD,分解过程如下:
①确定信号S(t)上的所有局部极值点,上、下2条包络线是用3次样条曲线分别将所有的局部极大值点和局部极小值点联结起来而得到的,即S(t)max和S(t)min;
②求每个时刻的上下包络的平均值,即:
(4)
③得到新信号:
Y1(t)=S(t)-u(t)
(5)
判断Y1(t)是否满足IMF分量的两个条件((a)在整个数据序列中,极值点的数量与过零点的数量相等,或最多相差不能多于一个;(b)在任一点上,信号的局部最大值和局部最小值定义的包络均值为零),如果满足记为C1(t),即为第一个IMF分量,否则重复步骤1和2;
④将C1(t)从S(t)中分离出来得到一个差值信号:
V1(t)=S(t)-C1(t)
(6)
⑤将V1(t)作为原始数据,重复求IMF1的步骤得到IMF2,重复n次得到n个IMF分量,于是有:
V1-C2=V2(t)
⋮
Vn-1-Cn=Vn(t)
(7)
当Vn(t)符合给定的终止条件(即Vn(t)为单调函数)时,循环结束。由式(6)和式(7)可得到:
(8)
即原始信号被表示为本征模态函数分量和一个残余函数Vn(t)的和。各分量C1(t),C2(t),…,Cn(t)分别涵盖了原始信号中从高到低不同频率段的信息,且随信号自身的改变而改变。
(3)每次加入不同白噪声后重复过程(1)和(2);
(4)将多次EMD分解后的各IMF分量的均值作为最终结果。
3 超限学习机(ELM)
ELM最初是由黄广斌教授在2004年提出的[11-13],该方法是一种简单易用且有效的单隐层前馈神经网络学习算法。其在训练的过程中随机给定输入层与隐含层之间的权值,以及隐层神经元的阈值,且在算法完整运行过程中这两个参数保持恒定,单在给定隐含层神经元个数的情况下,神经网络就可以得到最优解,且最优解唯一[14]。
对于样本数为N的数据集(xi,yj)∈Rn×Rm,L个隐层节点的SLFN可描述为:
(9)
式中:wi—输入权值;bi—隐层神经元阈值;βi—隐层第i个神经元与输出层的连接权值;G(wi·xj+bi)—隐层神经元的激活函数。
以矩阵的形式表示为:
Hβ=Y
(10)
式中:H—神经网络隐层输出矩阵。
因为随机产生输入权值和隐层神经元阈值,不需要调整H,隐层与输出连接权值β通过求解方程解得,即:
(11)
式中:H+—隐层输出矩阵H的Moore-Penrose广义逆。
因此,ELM算法步骤如下:
(1)确定前馈神经网络的结构(隐层节点数、激活函数类型);
(2)随机生成前馈神经网络的输入权值和偏置;
(3)求解前馈神经网络输出权值[15-16]。
备注:Huang等人使用增量的方法分析了ELM的通用逼近能力,并且表明了随机生成(多种)隐层参数可让单层前馈网络逼近任何连续的目标函数。
4 实验及结果分析
本文以轴向柱塞泵为研究对象,采集了泵壳振动信号作为原始信号,将振动信号通过MED降噪,再进行EEMD自适应分解之后再通过SVD分解作为特征矩阵,最后将以上提取的特征矩阵导入ELM进行分类,实现轴向柱塞泵松靴故障的检测与诊断。
具体研究过程如图1所示。
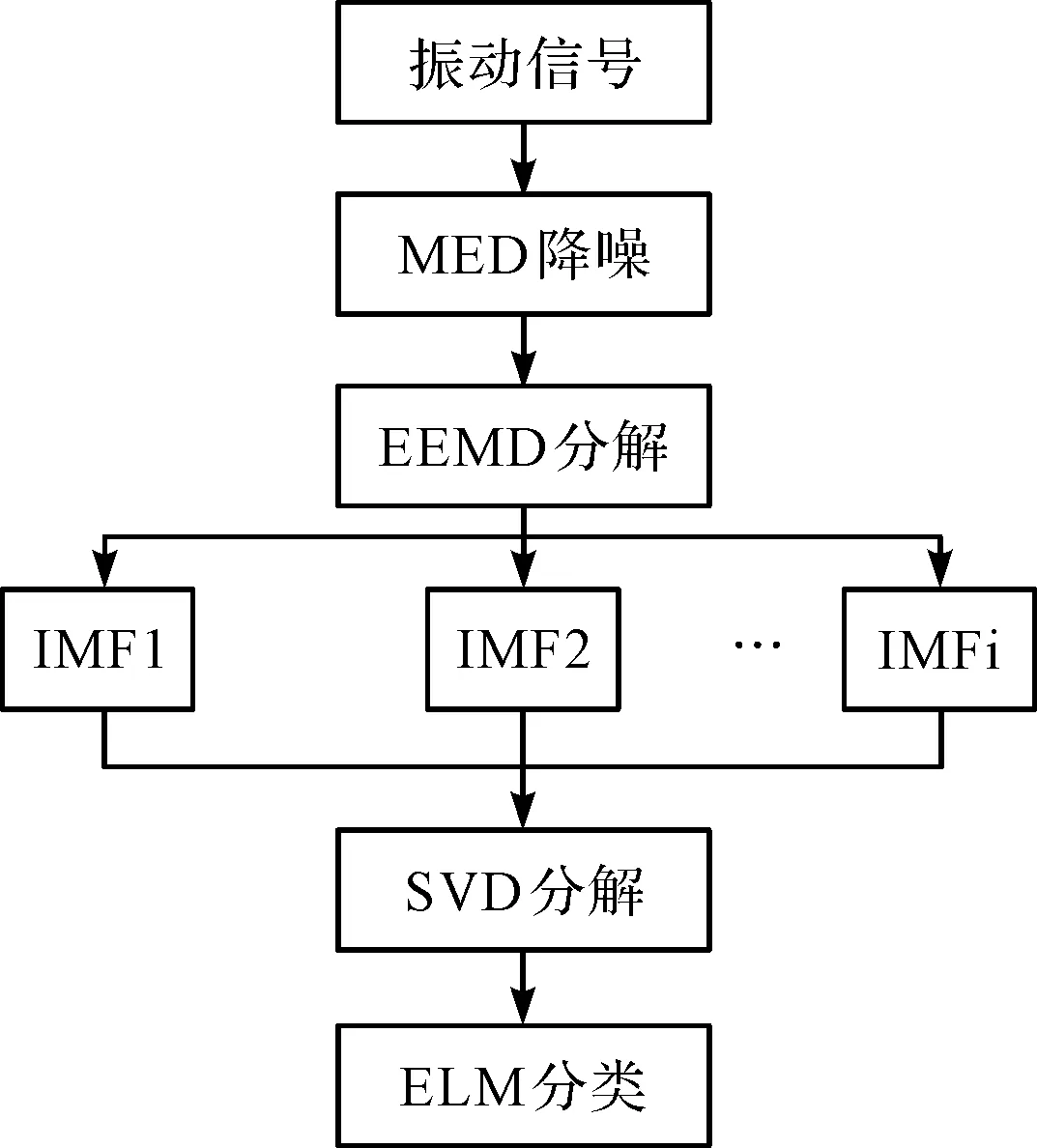
图1 研究思路流程图
4.1 实验装置
为了验证MED-EEMD方法的有效性,笔者将其应用到柱塞泵松靴故障中,实验系统图如图2所示。
实验台采用交流电机驱动方案,电机经过联轴器直接驱动柱塞泵,结构简单且平稳可靠。实验调定主油路压力为10 MPa。通过振动加速度传感器采集泵壳振动信号,该信号经过耦合器和采集卡,并通过转换储存于计算机中。
部分元件型号及性能参数如下:
(1)驱动电机。型号Y225S-4,额定转速为1 480 r/min;
(2)轴向柱塞泵。型号A10VSO45,柱塞数为9,额定压力为28 MPa;
(3)加速度传感器。型号KISTLER8795A50,频率响应范围1 Hz~4 000 Hz;
(4)耦合器。型号为KISTLER 5134;
(5)数字采集卡。型号NI-USB-6343,采样频率为45 kHz。
由于柱塞泵内部结构紧凑,受外界干扰严重,振动能量会以信号的形式通过各种介质传播到传感器,为了最大程度地将故障信息通过振动信号表征出来,本研究将三轴加速度传感器分别安装于顶部、侧面和端盖。
三轴加速度传感器布点位置如图3所示。
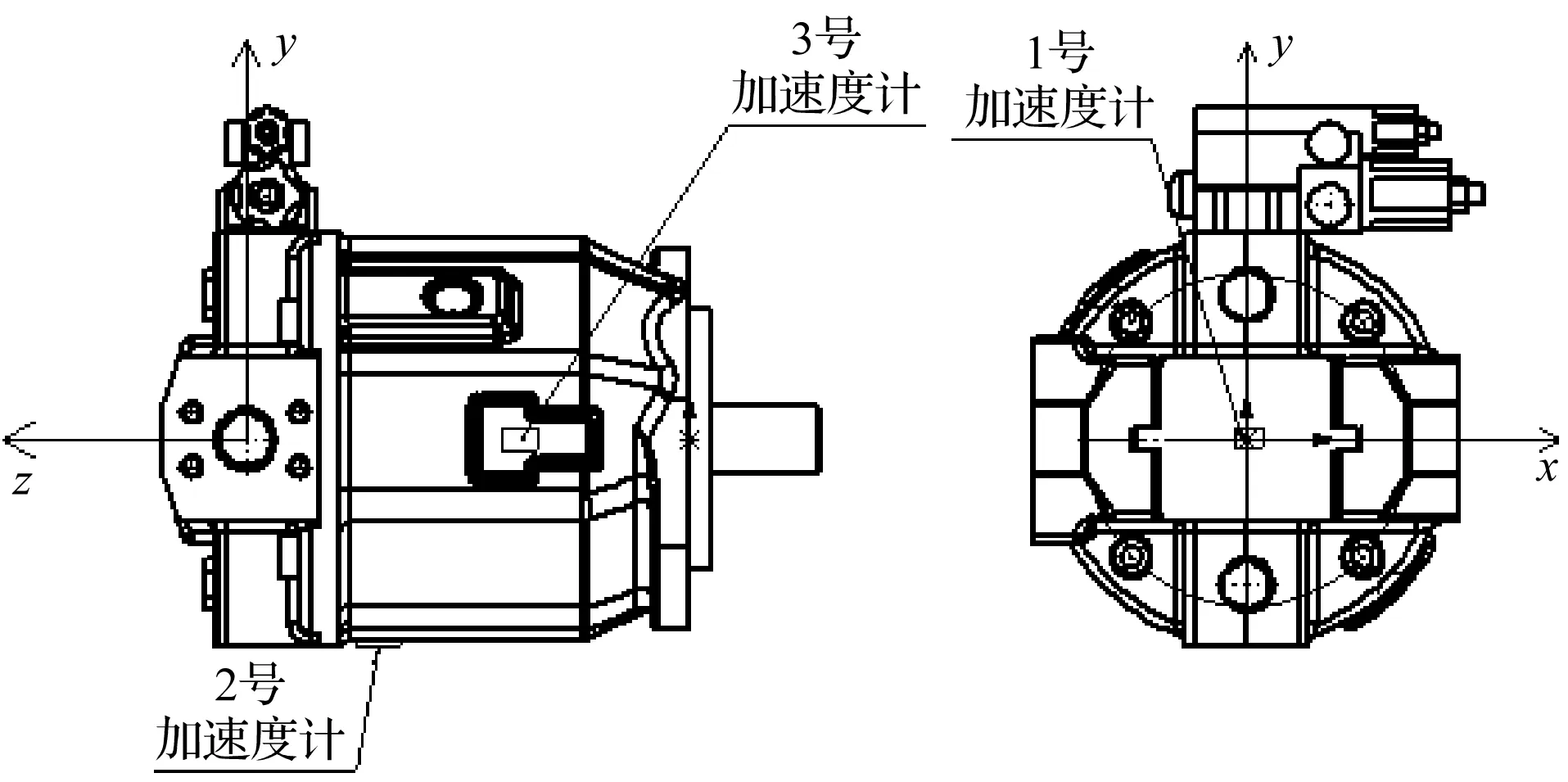
图3 三轴加速度传感器布点位置
三轴加速度传感器方向如表1所示[17]。
表1 三轴加速度传感器方向说明
注:X轴,Y轴,Z轴-各传感器的轴方向;主(X轴),主(Y轴),主(Z轴)-图3中所示方向
4.2 实验数据分析
实验中采集了柱塞泵正常和松靴两种模式下的信号分析,如图4所示。

图4 振动信号分析
其时域波形如图4(a~b)所示,故障信号已经完全被噪声淹没,从时域信号中看不出任何明显的故障特征,从而很难直接断定柱塞泵的状态。
而MED可以有效地提取信号中的微弱冲击成分,经过MED降噪如图4(c~d)所示,可以看到信号中周期性的冲击成分明显提高。每个冲击之间的间隔约分别为0.04 s,0.02 s,对应转轴频率和松靴故障特征频率。
松靴状态MED去噪包络谱如图4(e)所示,可以看出,经过MED去噪和包络解调,振动信号的峰值确实在转轴频率和其倍频处,同故障机理分析保持一致。
4.3 故障特征提取
原始信号经过MED去噪,然后对去噪信号进行了EEMD分解,把振动信号分解为一系列本征模态函数,使其分布在不同的频带。为了精确、快速以及智能化的实现故障诊断,在EEMD处理信号之后,笔者根据IMF分量与原信号的相关性原则选取前5层进行奇异值分解,最终组成5维的特征向量。
本研究用EEMD对正常状态和松靴状态进行MED去噪,信号经过EEMD分解结果如图5所示。
由图5可以看出,经过EEMD分解之后,每个分量的冲击特性都得到加强。
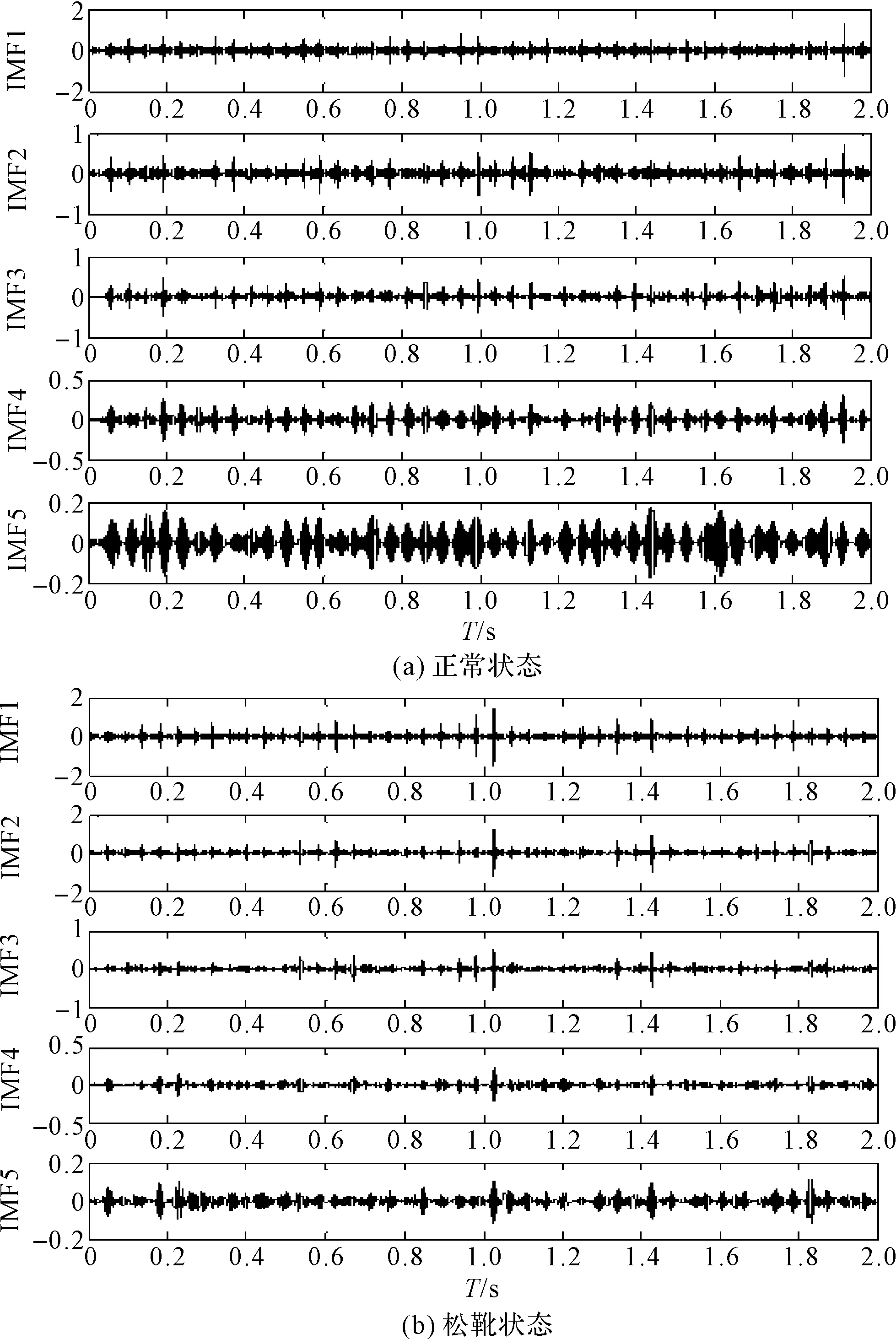
图5 MED去噪信号经过EEMD分解
4.4 数据集分配
实验借助于LabVIEW虚拟仪器和NI数据采集系统,采集了正常状态和松靴故障模式下的振动信号。经过去噪,将其通过EEMD分解为一系列模态分量,对前5个分量再进行SVD分解,所以每种模式组成一个200×5的特征矩阵,最终将所有模式数据组合起来构成一个400×5特征向量矩阵,然后赋予相应的模式标签。
数据分配与类别标签如表2所示。

表2 数据分配与类别标签
4.5 实验结果分析
本文所有的计算都是建立在Matlab R2014a的平台之上。为了能够获得可靠稳定的诊断模型,减小实验误差,本文采用交叉验证法(Cross-validation)进行了20次训练和测试求取均值。
实验计算结果如表3所示。

表3 实验结果分析
该实验结果给出了采用不同的特征提取方法(MED+EEMD,EEMD)以及不同的模式识别算法(BP,SVM,ELM)时,轴向柱塞泵松靴故障的诊断结果。对于任一模式识别算法,采用MED+EEMD的特征提取方法,相比于仅通过EEMD的特征提取方法,可以获得更高的诊断精度。对于任一特征提取方法,采用ELM模式识别算法可以获得更高的诊断精度,同时ELM模式识别算法所需的训练时间最短。
5 结束语
本文针对用EEMD在强噪声环境下对松靴故障特征提取表现不佳,通过MED对柱塞泵松靴故障振动信号去噪,突出了信号的冲击成分,增强了特征值提取的准确性,从而提高了分类精度。
(1)EEMD是一种自适应信号分解方法,其分解效果相对于EMD分解可以有效避免冲击性信号引起的模态混叠,能够更加准确地反映出故障信息;
(2)将MED和EEMD相结合的方法可以有效地提取出柱塞泵松靴故障特征。ELM分类器可以有效地对柱塞泵进行故障诊断。
本文通过实验验证了所提出的方法可以实现柱塞泵的松靴微弱故障的更高精度诊断。