井控与构造约束条件下的网格层析速度建模技术及应用
2020-03-30张在金陈可洋范兴才赵海波
张在金,陈可洋,范兴才,赵海波
(中国石油天然气集团股份有限公司大庆油田有限责任公司勘探开发研究院,黑龙江大庆163712)
断层阴影作为普遍存在的构造假象,出现在断层下部的地震成像不可靠区。断层两侧速度的不准确及时间偏移成像会导致地震成像不可靠区的同相轴出现上凸或下拉现象,严重时会出现同相轴错断。同相轴上凸现象会造成假构造高点,此类假微幅构造会影响解释以及井位部署。FAGIN[1]首次提出断层阴影形成机理,并从模型正演角度,通过分别设置高速层和低速层的方式分析断层下部地层出现上凸和下拉现象的原因,进而指出准确的速度建模以及深度域成像可以解决断层阴影问题;TRINCHERO[2],GOCHIOCO等[3],NAWAB等[4]分别通过地震波场正演分析断层阴影形成机理,提出地球物理、地质学和油藏工程联合判断断层阴影的方法,从而避免了钻井失误;BIRDUS等[5-6]通过分析三维正演结果,提出采用宽方位采集以及深度域层析速度建模解决断层阴影问题;SOLANKE[7]认为合理的静校正处理、近地表速度模型建立、宽频带噪声压制、各向异性分析以及合适的成像方法有助于解决断层阴影的问题;姜岩等[8]从解释角度,分析断层断距、低速带或高速带等对断层阴影的影响程度,提出油田开发过程中应重点关注断层阴影问题,并通过井震结合的方式建立空变速度场对时间域地震资料进行时深转换以消除断层阴影。国内外研究表明解决断层阴影问题的关键是叠前深度偏移,而叠前深度偏移的关键是准确的速度建模技术[9]。基于层析反演的速度建模[10-13]方法较为常用,此类方法虽然能提供合理的速度模型,但由于断层两侧速度不具有连续性,层析反演难以获得断层附近的准确速度;彭海龙等[14]在层析反演速度建模的基础上引入断层控制,使得速度更新不能跨越断面,该方法可以提高断块区域速度场精度,但未考虑构造建模的准确性。
本文在波场正演指导下,采用VSP速度、测井曲线及地面地震层位、断层联合约束反演方法进行速度建模及叠前深度偏移成像,消除了由断层引起的断层阴影构造假象。首先介绍断层阴影形成机理及消除方式,然后在VSP速度及测井曲线约束下建立初始深度域速度模型并提出构造约束(层控、断控)条件下的网格层析速度建模技术,最后将该技术应用于YX工区三维地震资料的速度建模,利用井控和构造约束条件下的各向异性速度模型进行叠前深度偏移,较好地解决了该工区的断层阴影构造假象问题。
1 断层阴影波场特征正演分析
1.1 断层阴影形成机理分析
断层两侧的速度差异导致时间域成像时出现断层阴影,如断层下部出现直立断层,在构造上表现为“双眼皮”现象,影响构造解释,断层下部出现上凸或者下凹的微幅构造。断层阴影引起的局部构造高点易导致钻井失误。
为分析断层阴影的形成机制,设计了如图1a所示的模型,含有低速层(紫色和浅灰色地层)的水平地层模型被断层断开,断层两侧地层仍呈水平,该模型的正演结果如图1b所示,可以看出断层上部成像结果准确,同相轴未发生畸变;断层下部受断层附近速度突变的影响,同相轴畸变明显,下部地层出现假微幅构造,影响地震解释工作。
1.2 断层阴影消除方法分析
通常采用叠前深度偏移成像技术解决断层下部构造阴影问题,为分析速度、叠前时间偏移及叠前深度偏移对断层下部地层成像的影响,利用图2a所示速度模型进行二维正演,并对正演结果进行速度分析、Kirchhoff叠前时间偏移成像及Kirchhoff叠前深度偏移成像,结果分别如图2b,图2c,图2d,图2e和图2f 所示。
图2a为正演采用的深度域速度模型,图2b是根据图2a的层速度利用DIX公式转换得到的时间域均方根速度模型,图2c是速度分析得到的深度域速度模型,首先利用时间域均方根速度分析结果建立时间域均方根速度模型,然后通过约束速度反演建立深度域初始速度模型,最后采用层位约束层析建模方法建立深度域速度模型,图2d是将图2a模型直接进行Kirchhoff叠前深度偏移的结果,图2e是利用图2b模型进行Kirchhoff叠前时间偏移的结果,图2f是利用图2c模型进行Kirchhoff叠前深度偏移的结果,可以看出叠前深度偏移可以消除断层阴影,而时间域偏移成像时由于该偏移算法未考虑速度横向变化,所以采用高精度的均方根速度模型会造成同相轴畸变;不合理的深度域速度模型会导致深度域成像结果的同相轴畸变,因此利用叠前深度偏移解决断层阴影问题的关键是深度域速度建模技术及叠前深度偏移技术,本文只讨论前者。
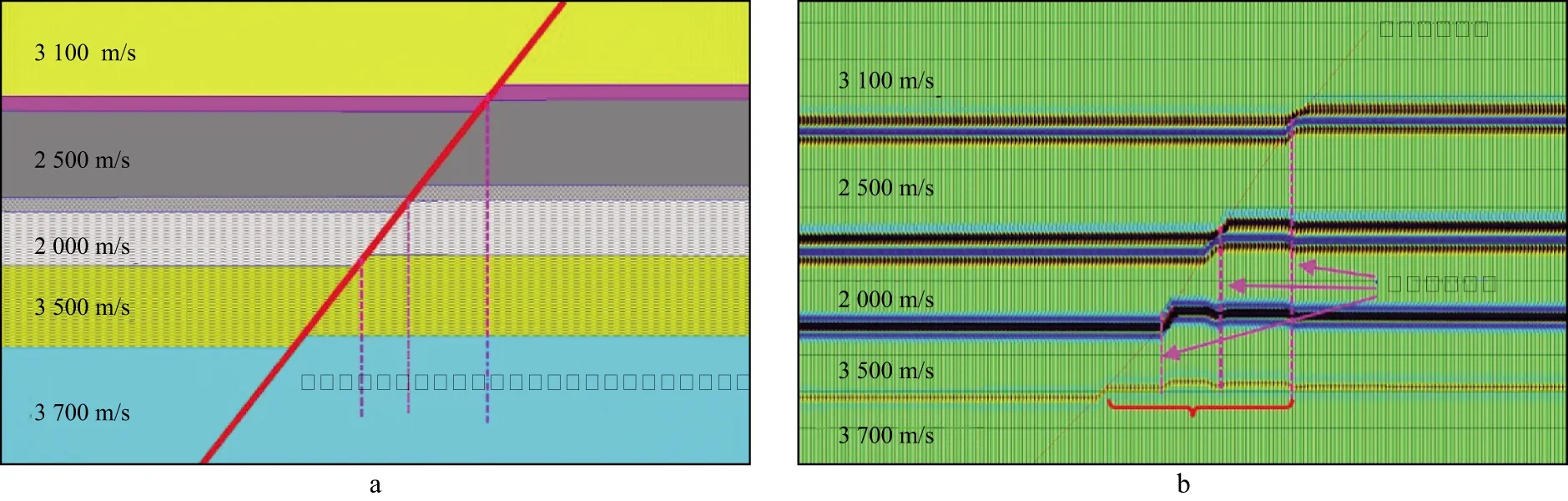
图1 断层阴影区地质模型(a)及正演结果(b)
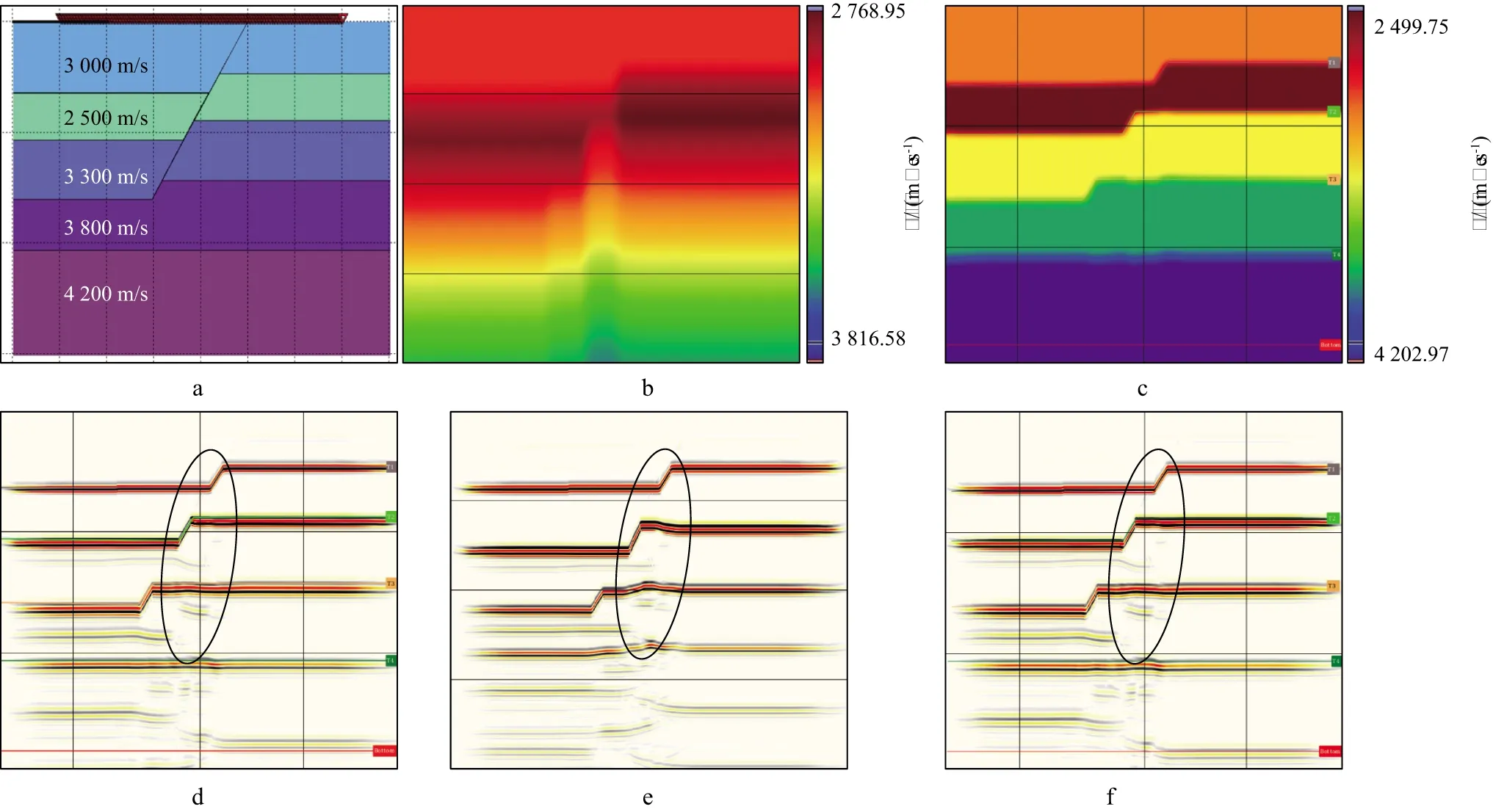
图2 速度模型、时间偏移及深度偏移结果a 正演采用的深度域速度模型; b 时间域均方根速度模型; c 速度分析得到的深度域速度模型; d 对图2a模型进行Kirchhoff叠前深度偏移的结果; e 对图2b模型进行Kirchhoff叠前时间偏移的结果; f 对图2c模型进行Kirchhoff叠前深度偏移的结果
2 井控与构造约束条件下的网格层析速度建模技术
2.1 网格层析建模原理
网格层析速度反演利用实测数据的旅行时和预测数据旅行时差的反投影来更新波传播路径上每一点的速度值,据此可以建立如下方程:
(1)
式中:s为慢度;δs是慢度修正量;L为偏移速度射线路径;L′为真实射线路径;dl为沿射线路径上的微分。方程(1)经过变换可以得到如下方程:
(2)
式中:ΔT为剩余时差。方程(2)的离散形式如下:
(3)
式中:Δt为剩余时差的离散形式,Δsi为第i个网格点慢度扰动;li为该射线在第i个网格内的射线长度,这样每个拾取剩余深度差都会对应一个剩余时间差,即对应一条射线路径,所有射线可组成如下的大型稀疏矩阵方程:
L·ΔS=ΔT
(4)
式中:ΔS,ΔT分别为s,ΔT组成的系数矩阵。通过求解方程(4)进行速度反演和迭代更新。
2.2 井控与构造约束条件下的网格层析速度建模
2.2.1 井控初始层速度建模
叠前深度偏移的关键是建立准确的层速度模型,时间域层速度模型时深转换得到常规深度域初始速度模型,但由时间域层速度模型直接转换得到的深度域层速度与实际地层层速度差异较大,影响后期速度迭代收敛的效率和精度,甚至迭代过程会陷入局部极小值。为得到合理的深度域初始层速度模型,先对时间偏移成像结果进行层位标定,确定地质分层与偏移剖面同相轴对应关系;然后进行构造解释,利用解释层位提取叠前时间偏移域沿层层速度平面图,然后分析工区内零偏垂直地震剖面(zero vertical seismic profile,ZVSP)的井层速度信息及测井曲线层速度信息,统计提取的沿层层速度平面图与ZVSP速度及测井曲线层速度之间的差异,对统计的速度差异插值得到沿层层速度差异平面图,再对沿层层速度模型进行校正,最后利用校正后的沿层层速度平面图将叠前时间偏移域层位转换到深度域,得到深度域初始层速度模型。
2.2.2 层控、断控网格层析速度建模
利用网格层析技术进行全局速度模型更新时,不考虑断层的影响,对断层两侧速度同时更新,会导致断层两侧速度描述不准确,并且偏移成像结果出现断层阴影假象。结合理论模型及实际工区处理情况建立如图3所示的井控与构造约束条件下的网格层析速度建模流程,以消除实际资料中的断层阴影。本文首先利用前文建立的井控深度域初始层速度进行叠前深度偏移成像;然后在深度偏移叠加剖面上进行层位和断层解释,利用解释的层位和断层建立构造模型;再利用构造模型插值得到带层位和断层的实体模型,层析划分网格时将断层两侧划分为不同的网格,以断层为分界面展开分块速度更新,避免了常规网格层析方式在断层附近的速度模糊特性;然后对更新后的速度再次进行叠前深度偏移,重新构造解释、提取构造属性、拾取CIP道集剩余深度差,以及迭代更新各向同性速度模型;接着在各向同性速度模型合理的情况下统计地震层位与测井分层的深度差,利用该深度差与各向同性速度、各向异性速度的关系建立各向异性参数模型;最后经多次迭代得到符合地质规律的深度域速度模型。
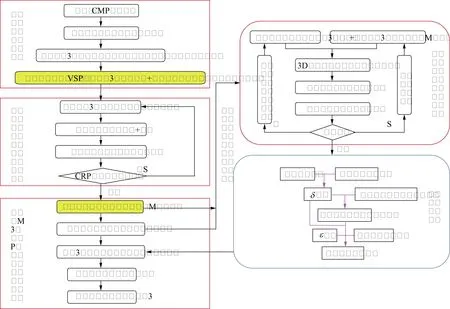
图3 井控和构造约束条件下的网格层析速度建模流程
在上述建模过程中,重点步骤是井控初始速度建模以及断控、层控构造建模(图3黄色框)。
3 应用实例及效果分析
高覆盖宽方位地震采集得到的YX工区三维地震资料层位解释成果如图4所示,工区内存在两条较大断裂。由断层引起的构造假象造成了目的层深度预测结果与实际钻井深度差异较大,为消除该构造假象,采用本文方法先进行速度建模,再进行Kirchhoff叠前深度偏移成像。
3.1 井控初始层速度建模
深度域速度建模的关键是时间域层位精细标定,本工区存在1口ZVSP井(XS6),对该井的ZVSP数据进行处理,建立井点处深度域层速度以及走廊叠加道,图5a 为ZVSP与地面地震综合标定结果,图5b为速度曲线。图5b左侧绿线为ZVSP平均速度曲线,中间黑线为测井速度曲线,中间红线为ZVSP层速度曲线,右侧黑线为常规地面地震深度域层速度曲线,右侧红线为ZVSP层速度曲线,可以看出,ZVSP层速度与测井速度有着良好的对应关系,因常规地面地震层速度代表了地层速度的低频趋势,不能很好地体现速度细节变化,因此,利用ZVSP层速度可以为地面地震速度校正提供合理的初始偏移速度。结合工区其他测井资料综合标定,可确定地面地震解释层位与测井分层的对应关系(图6a),在此基础上进行时间域层位解释(图6b),然后提取时间域沿层层速度平面图(图6c),对图6c插值平滑得到图6d所示的时间域沿层层速度平面展布,经ZVSP层速度及测井速度(井控速度误差)校正后的时间域层速度平面如图6e所示,井控速度误差校正处理后,XU14井点处的速度由图6d的3521m/s校正为图6e的2594m/s,符合井点处速度变化特征,校正后的时间域沿层层速度模型如图6f所示,将图6f的时间域沿层层速度转换到深度域得到深度域沿层层速度,然后利用沿层插值方式建立如图6g所示初始深度域层速度模型。
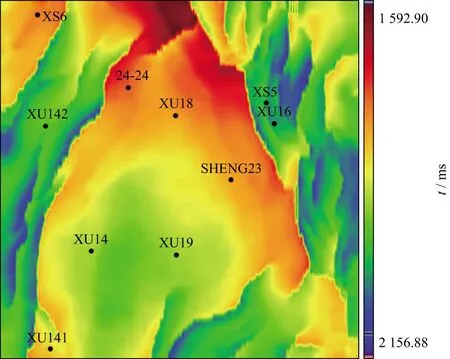
图4 工区T2解释层位
3.2 构造约束条件下的高精度网格层析建模及偏移成像
首先采用初始深度域速度模型(图6g)进行叠前深度偏移,在偏移成像结果上进行层位和断层解释,根据解释成果建立的构造模型如图7a所示,进而形成实体模型(图7b),对偏移结果提取倾角、方位角和连续体3个属性并形成种子点(图7c),利用种子点拾取剩余深度差(图7d)。与初始深度域速度模型对比可以看出,在建模构造约束条件下进行高精度网格层析得到的深度域速度模型剩余速度小,叠前深度偏移共成像点道集被拉平(图8)。
为了证明本文方法建立的速度模型能更好地解决断层阴影问题,对利用常规网格层析建立的速度模型(图9a)及本文方法建立的速度模型(图9b)进行叠前深度偏移,偏移成像结果如图9c和图9d所示,可以看出,利用本文方法建立的速度模型可以较好地消除断层阴影构造假象。为了校正解释层位与测井分层的深度差,展开了各向异性速度及各向异性参数反演,最终建立的速度模型如图10所示,可以看出,图10b 中速度分界面与测井分层对应情况更好。本文比较了叠前时间偏移及各向异性叠前深度偏移成像结果,可以看出,时间域剖面XU14井处存在从上到下的构造假象(图11a),井控和构造约束条件下网格层析得到的各向异性速度叠前深度偏移结果如图11b 所示,断层阴影引起的构造假象得到消除。分别采用常规层析方法和本文方法建立速度模型,对上述速度模型的偏移成像结果提取沿T2层相干属性,得到的结果如图12所示,可以看出,图12b中XU14井点处构造假象得到消除,其它位置的断层阴影假象也得到一定程度的压制。

图5 XS6井ZVSP与地面地震综合标定结果(a)及速度曲线(b)
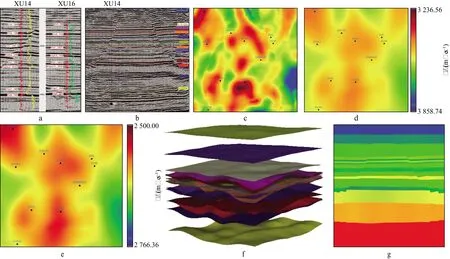
图6 井控初始深度域速度建模过程a 井震标定; b 解释层位; c 时间域沿层层速度平面展布; d 插值平滑后的时间域沿层层速度平面展布; e 井控速度误差校正后的时间域沿层层速度平面展布; f 深度域沿层层速度模型; g 初始深度域层速度模型
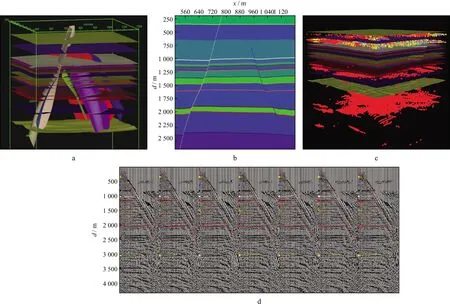
图7 构造约束网格层析速度建模a 构造模型; b 实体模型; c 种子点; d 剩余深度差
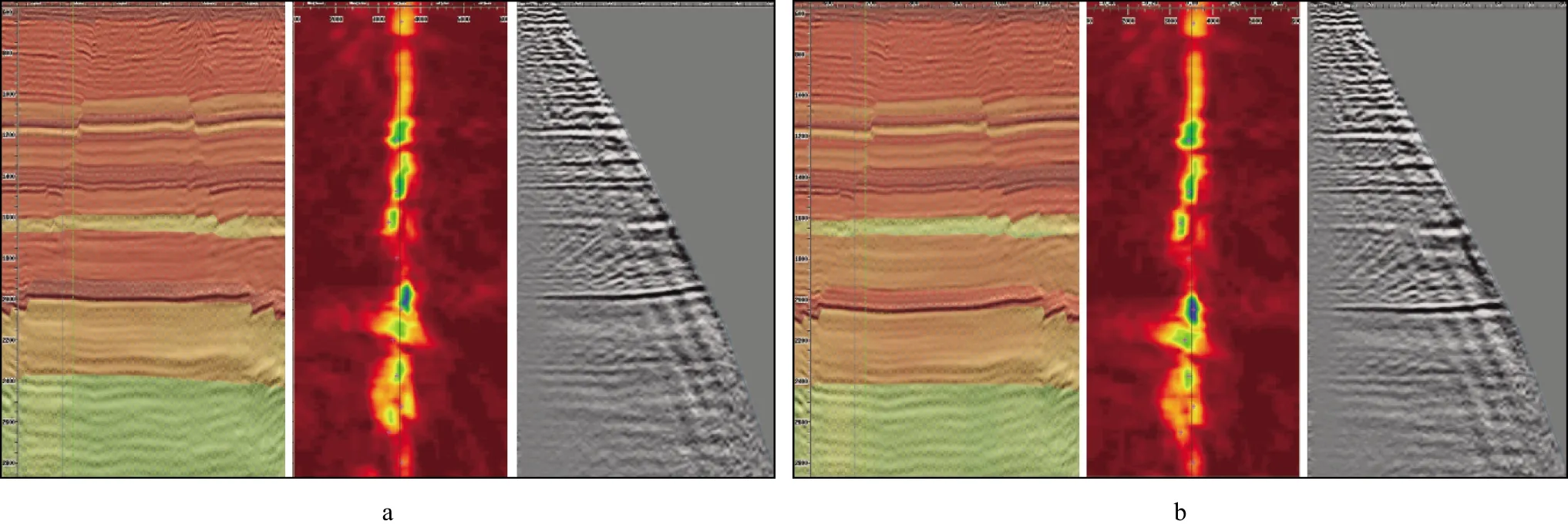
图8 构造约束条件下网格层析前(a)、后(b)深度域速度、剩余速度及共成像点道集
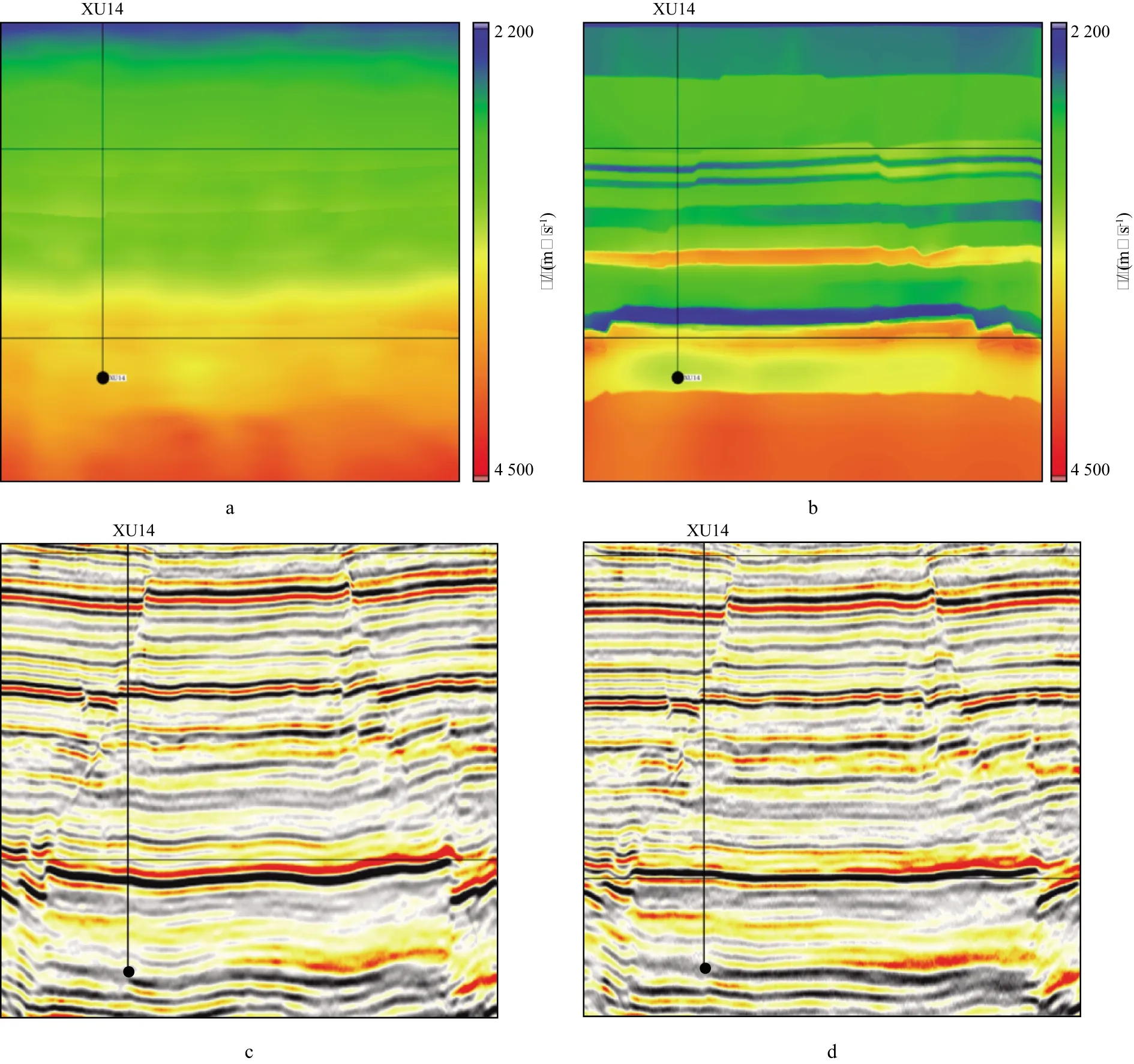
图9 常规网格层析与井控和构造约束条件下的网格层析速度模型及叠前深度偏移成像结果a 常规网格层析速度模型; b 井控和构造约束条件下的网格层析速度模型; c 常规网格层析速度建模叠前深度偏移成像结果; d 井控和构造约束条件下的网格层析速度建模叠前深度偏移成像结果
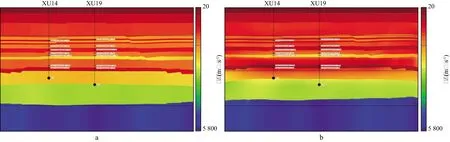
图10 各向异性速度及各向异性参数反演前(a)、后(b)的速度模型

图11 叠前时间偏移(a)及井控和构造约束条件下网格层析各向异性速度叠前深度偏移(b)成像结果
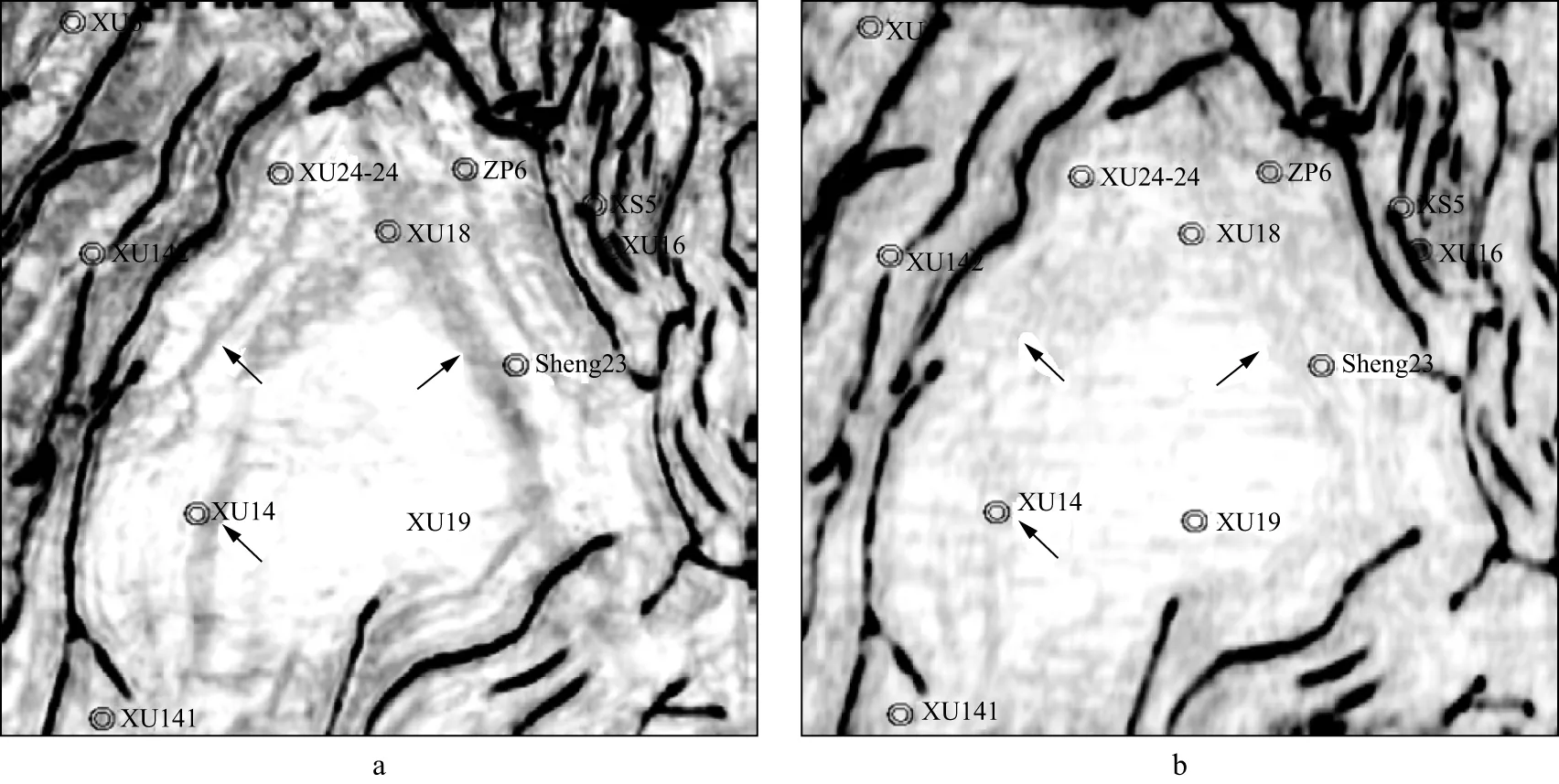
图12 采用常规层析方法(a)和本文方法得到的(b)沿T2层相干属性
4 认识与结论
1) 断层两侧速度不准确及时间域成像产生断层阴影构造假象,本文方法利用VSP信息及测井信息建立符合实际地质情况的初始速度模型,利用断层控制使网格层析跨越断层,并得到断层两侧准确的速度信息,利用该速度信息进行叠前深度偏移可以较好地解决断层阴影构造假象问题,为下一步的地震解释及井位部署提供准确的地震成像结果。
2) 速度一直是制约地震技术发展的关键,速度模型建立过程中需要地质认识的指导,通常处理人员从地震资料出发进行速度分析,未充分利用工区地质、测井、VSP和微地震信息,因此综合利用各种资料进行井地联合处理解释一体化建模技术尤为重要。
