基于STM32微控制器稳定平台数字控制系统的设计*
2020-03-30田永全张宏亮陈洪波
张 瑞,田永全,赵 阳,张宏亮,田 雪,陈洪波
(北方光电股份有限公司, 西安 710043)
0 引言
稳定平台的主要作用是使被控载体在惯性空间的指向保持稳定[1],使载体与平台所受到的干扰隔离,为其能够稳定的跟踪目标提供基础。其控制方法的实现及指标的优化一直是国内外研究的热点问题。
稳定平台的实现有多种方法,传统的模拟电路稳定平台控制方法主要是使用电阻、电容、运算放大器组成模拟电路,通过大量的计算、试验等方法实现,存在参数调整不灵活、体积大、成本高[2]等缺点。而采用数字控制系统的稳定平台系统可以克服以上缺点,且控制精度更高。为了实现该数字控制系统,文中以STM32F103ZET6微控制器为核心芯片,其主要特点是性能稳定、价格低廉、功能齐全,且开发环境友好,完全可以实现本设计所使用的速度环、位置环双闭环控制功能。
1 稳定平台工作原理
稳定平台本质上就是一个控制系统[3]。
文中所设计并实现的稳定平台数字控制系统框图如图1所示。
稳定平台多采用双框架式结构,通过轴承等零部件的配合,使负载的方向轴可以指向所设计角度范围内的任意角度。通过合理的结构设计,可以使电机、传感器的线束对负载的干扰力矩得到较大程度的优化。
文中所采用的控制方案为位置环、速度环双闭环控制。当稳定平台在惯性空间运动时,各部件之间产生的干扰力矩对负载的运动产生影响,使负载不能按照设计所期望的角速度运行。此时,速率陀螺会敏感干扰导致的异常角速度,其输出电压经过控制电路处理后送给力矩电机产生相反的力矩来平衡干扰力矩[4],从而实现对干扰的隔离。
2 稳定平台硬件设计
硬件设计方案以STM32F103ZET6微控制器为核心芯片,同时与AD采样芯片、串口通信芯片、光耦隔离芯片完成数据通信与信号隔离。完成的功能有信号采样、数据通信、功率放大与电机控制。硬件系统方案框图如图2所示。

图2 硬件系统方案框图
速率陀螺及电位计信号都为模拟信号,经过AD采样器输出数字信号,通过串行外设接口(SPI)与微控制器进行数据通信。同时,误差信号通过RS422通信芯片与微控制器的串口1(USART)进行通信。以上数据在芯片内经过算法的处理后,通过定时器配置脉宽调制信号(PWM),经过功率放大器进行功率放大,完成对电机的实时控制。
2.1 模数采样电路
在综合考虑分辨率、模拟采样范围、通信模式、带宽、信噪比、转换速率等因素后,选择AD7328来实现AD采样功能。该器件为12 bit逐次逼近型AD采样器。
本设计将该芯片的模拟地和数字地隔离,降低数字脉冲信号对模拟信号的干扰概率。
2.2 功率放大电路
功率放大电路主要由功率放大器及其辅助电路组成。设计所采用的功率放大器WSA54属于开关型功放,内部控制电路提供了开关管死区时间。由于其工作状态下电流大,而且工作于开关状态,容易对电源、地及其他芯片造成干扰。本设计中将微控制器的定时器3产生的两路PWM波信号经过HCPL2630双通道光电耦合器隔离后输出,这种信号隔离方法可以降低功率器件对逻辑芯片的干扰。
2.3 速率陀螺
速率陀螺的选则按照环境适应性、外形尺寸、精度、成本的顺序考虑,经调研,选择了一款微小型动力调谐陀螺,具有体积小、重量轻、测量范围大、可靠性高等特点。适用于过载系数大、尺寸空间小的伺服控制系统。该陀螺的输出为模拟量,实时反馈方位和俯仰两个方向的角速度,经过AD采样和数字滤波器,可作为控制系统算法速度环的反馈量参与计算。
3 软件设计
控制系统的软件设计是至关重要的,直接影响到系统的性能。控制周期越短,控制精度也越高,但计算量更大,根据工程经验,本设计的控制系统软件控制周期为1 ms,该控制周期的控制精度较高,AD芯片也可选用采样稳定性更高的模式,同时STM32微控制器处理数据的时间有较大的余量。子程序模块包括SPI通信、串口通信、PID算法等。
3.1 主程序设计
系统上电后,程序首先执行定时器、SPI、PWM功能、AD采样控制、IO口等子模块的初始化,对内部的寄存器、变量进行定义,随后进入while循环,等待陀螺的自检信号。自检通过后,才允许程序进入while(1)循环,在该循环中,等待系统的3个中断,根据中断程序的标志位选择执行的命令。软件主程序流程图如图3。
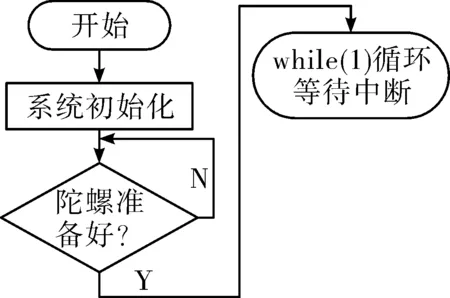
图3 主程序流程图
3.2 串口2中断
本设计中控制系统的工作状态由串口2接收到的命令确定,串口2的中断周期设计为10 ms,上位机按照约定好的通信协议每10 ms发送命令,USART2接收程序的中断流程图如图4所示。
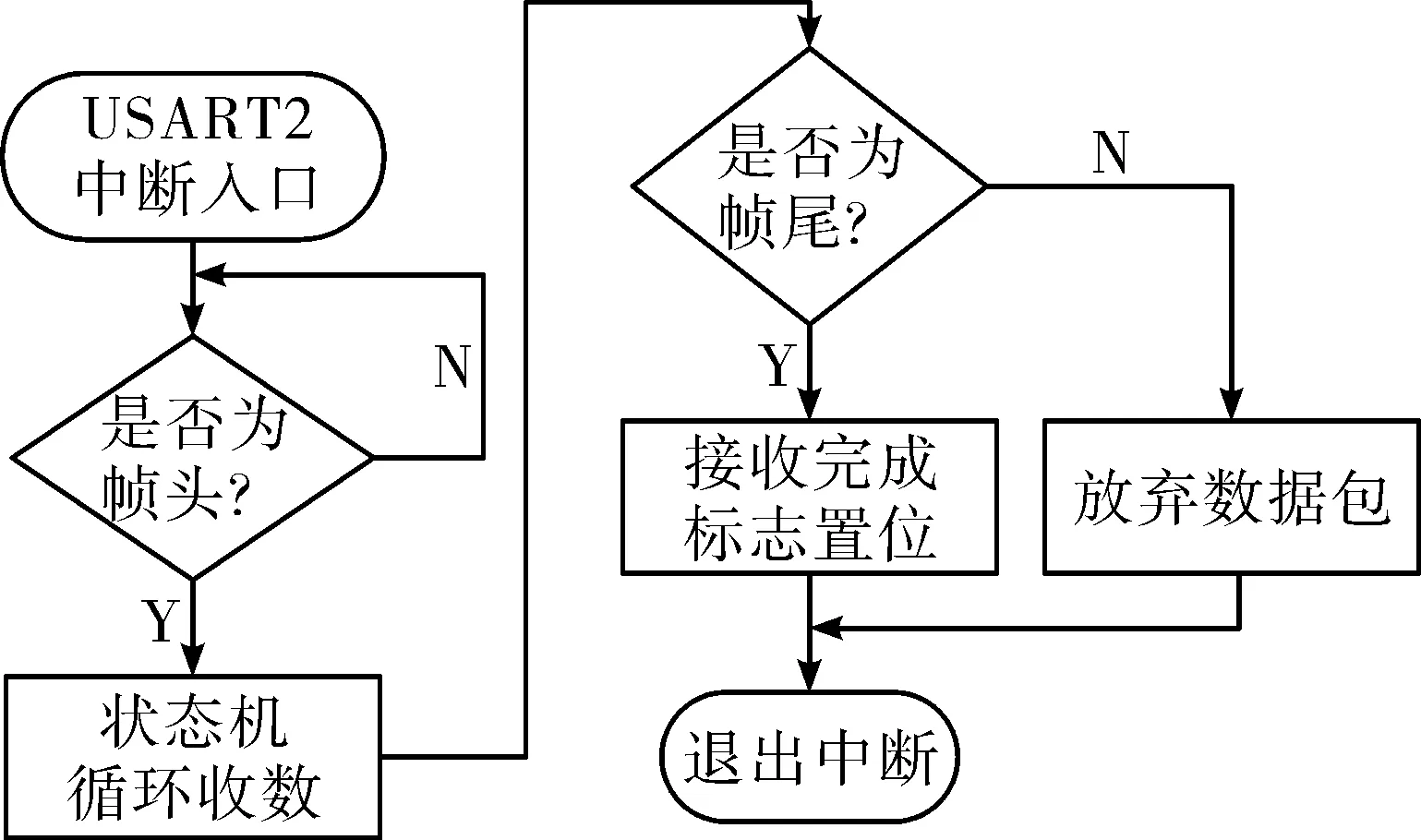
图4 USART2中断程序流程图
3.3 控制周期1 ms中断
控制周期中断程序完成的主要功能是接收USART2的数据命令及SPI口的AD采样数据,将以上数据汇总后,经过优化的PID算法处理,输出控制指令给PWM控制器,完成位置环和速度环双闭环控制;中断程序执行完毕后,返回主程序,等待下次1 ms的中断。如此循环,PWM的控制周期每1 ms更新,兼顾了主程序的计算量和控制精度的要求。方位方向的控制方法与俯仰方向一致,方位方向控制周期1 ms中断的流程图如图5所示。

图5 控制周期1 ms中断流程图
3.4 控制系统状态数据发送
控制系统状态数据发送周期可根据具体要求进行设计,设计中使用了一个10 ms的定时器,发送控制系统的状态数据,具体包括信息头、陀螺速度、框架位置、自检状态、信息尾等信息,通过USART3与上位机进行通信,完成数据的解析。
3.5 陀螺自检程序
陀螺自检信号可以用来判断陀螺转子是否达到了稳速状态。本设计通过STM32微控制器的IO脚连接陀螺自检输出线。自检通过后,使用IO脚控制电机的使能端使能,随后进入主程序。通过该子程序,可以使用陀螺的自检信号控制电机工作的时机。
4 控制系统调试
本控制系统要达到的主要性能指标为:
1)被控载体可以在惯性空间保持稳定,使载体的视轴或光轴与平台所受到的扰动隔离。在控制系统的参数调节过程中,可以通过观察法去定性的判断系统是否达到了稳定,以及阻尼的大小是否足够隔离载体所受到的干扰。
2)隔离度要求在5%范围内。通过定性的调试及判断后,应该使用速率转台对隔离度指标进行检测,当隔离度不满足指标时,继续对控制软件参数进行调整,直到满足设计指标为止。
4.1 PID参数的调试
Matlab软件对控制模型进行仿真并对参数进行调整是一种较为流行的方法,但在系统实际调试过程中,对电机、陀螺、框架、负载的传递函数及转动惯量的计算与实际系统存在一定偏差,非线性因素及噪声也是仿真过程不能完全考虑到的。PID算法是一种经过验证的经典算法,使用中不需要精确的系统模型作为先决条件,可以直接在实际系统中应用并调试。本设计中所应用的两级PID算法,又称为串级PID调试。调试过程应该先对内环的P、I、D参数进行调试,在内环调试完成后再对外环参数进行调试。PID的标准数学公式为:
(1)
本设计的算法就是将该公式转换为微控制器可以执行的C代码并进行优化,在控制器中对数据灵活的进行处理,随时调整控制参数。
4.2 隔离度的计算
隔离度的测试方法为:将稳定平台安装至速率转台,控制转台做正弦运动,由于稳定平台在惯性空间中稳定的作用,其轴向将保持一个方向,记录转台在运动过程中的陀螺信号,统计峰峰值,并与转台运动速率峰值进行除法,经过多次测试,可以得到较为准确的隔离度指标。
4.3 试验数据及波形
4.3.1 陀螺角速度测试
将稳定平台安装至速率转台后,首先对上位机接收到的陀螺数据进行验证,在确定上位机软件显示与转台速度一致的情况下,隔离度的测试才真实准确。本设计使用Labview设计了专用上位机测控软件,使用速率转台装订1°/s、3°/s、0.5°/s,经测试,陀螺的数据反馈在误差允许的范围内,上位机实测的角速度如图6所示。
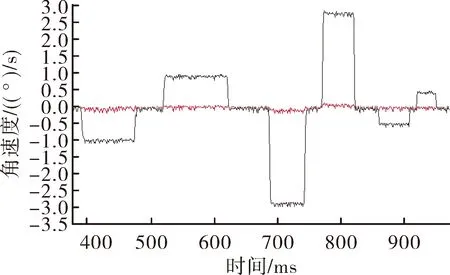
图6 实测角速度截图
4.3.2 隔离度测试
将转台装订为1°、3 Hz和2.5°、2 Hz两种条件,控制速率转台正弦运动,同时使用上位机软件实时监控陀螺的速率反馈,经计算,两种条件下隔离度都在5%范围内,满足设计指标要求,其中1°、3 Hz实测结果如图7所示。
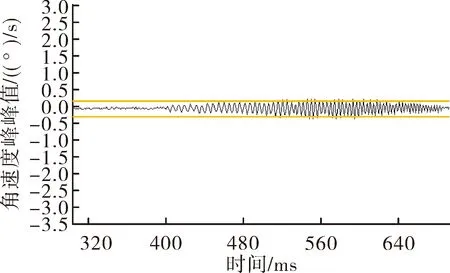
图7 1°、3 Hz条件隔离度测试截图
5 结论
文中介绍了一种基于STM32F103ZET6微控制器为核心器件的稳定平台数字控制系统。控制算法使用经典的PID算法,采用位置环、速度环双闭环控制,方法简单、可靠。大部分的数字信号处理都由微控制器完成,调试灵活方便,最终的实测数据及波形显示该稳定平台能够有效隔离干扰,使载体在惯性空间保持稳定。
