可变弹翼导弹弹道设计与仿真*
2020-03-30刘叙含张尚卓苗昊春黎海青王荔豪
刘叙含,张尚卓,苗昊春,黎海青,王荔豪
(1 西安现代控制技术研究所, 西安 710065; 2 西北工业大学航海学院, 西安 710072)
0 引言
现代化作战要求武器系统同时具备侦察、攻击、效能评估等特点[1],而传统的固定翼巡飞弹只能在不同的飞行任务状态之间进行折衷,无法达到全局最优的飞行性能。
可变弹翼导弹技术是一种先进的现代导弹设计技术[1]。其设计目标是,通过弹翼气动外形的自适应变化,解决不同任务类型设计点气动布局的矛盾,克服传统固定翼巡飞弹功能单一、机动性受限的设计弊端,实现导弹在多个任务上的通用化。由于其结构与气动参数动态变化,动力学模型与控制特性变得复杂[2],对导弹的弹道设计提出了更高的要求。
1 可变弹翼导弹基本概况
可变弹翼导弹的主要作战任务包括巡航、巡逻和攻击。其作战流程如图1所示:由陆基或空基平台发射,采用图2所示后掠伸展的巡航翼型以经济速度飞行至指定区域;接着变形为图3所示垂直伸展的巡逻翼型对目标区域进行低速侦察;捕获目标后变形为图4所示垂直收缩的攻击翼型对目标发起俯冲攻击。
图1 可变弹翼导弹的工作流程

图2 巡航翼型
图3 巡逻翼型

图4 攻击翼型
2 导弹质点弹道方案设计
弹道方案示意图如图5所示,包括初段弹道方案、巡航弹道方案、巡逻弹道方案和攻击弹道方案。全局控制方案如表1所示,将可变弹翼导弹看作一个质点,只考虑其在纵向平面上的运动[3]。

图5 弹道方案示意图
表1 可变弹翼导弹全局控制方案
初段弹道,要求可变弹翼导弹在脱离载机发射平台后按控制规律平稳下滑至指定高度H0后较快地转入平飞[4-5],运动方程为:
巡航阶段,采用大展弦比和一定后掠角的巡航翼型。该阶段采用航路规划导引方法,以及高度控制、倾斜转弯、滚转稳定控制方法。飞行高度y=H0,且θ=0,运动方程为:
巡逻阶段,采用大展弦比的巡逻翼型以满足升阻比的要求。该阶段采用回字形搜索导引方法在目标区域上空进行侦察飞行,以及高度控制、倾斜转弯、滚转稳定等控制方法。
攻击阶段,外弹翼收缩,以最大速度俯冲攻击。该阶段采用比例导引法[7]以及滚转稳定控制。运动方程为:
上述两方程组中,m为可变弹翼导弹质量;mc为导弹单位时间内质量消耗量;X为阻力;Y为升力;P为发动机推力;V为导弹速度;VT为目标速度;α为导弹攻角;θ为导弹倾角;r为导弹相对目标的距离;qT为目标线方位角;σ为导弹弹道角;σT为目标航向角;η为导弹速度矢量前置角;ηT为目标速度矢量前置角;K为比例系数。
3 仿真试验及分析
利用Simulink仿真平台建立可变弹翼导弹的数学模型[8-9],如图6所示,包含搜索模块、控制器模块、空气动力学模块、运动学模块以及时序模块。其中,搜索模块为系统提供目标测量信息;空气动力学模块为系统提供气动力参数和导弹结构参数等;运动学模块为系统提供导弹飞行过程中的运动学参数;控制器模块根据目标测量信息以及弹体运动信息计算出控制质量。仿真条件:导弹投放高度y=1 000 m,初始速度为70 m/s,初始弹道倾角θ=0°,初始攻角α=0°,巡逻高度H0=500 m,目标水平距离x=20 000 m。
图6 仿真模型
可变弹翼导弹的弹道曲线、速度曲线及弹道倾角曲线如图7~图9所示。由图可知:可变弹翼导弹由1 000 m高度的载机投放,初速为70 m/s,初始弹道倾角为0°;投放后导弹平稳下滑至巡逻高度500 m;该阶段导弹速度由70 m/s平缓爬升,弹道倾角保持在-4°左右;进入巡逻阶段后,飞行高度保持在500 m左右,缓慢下降以实现低速长航时侦查,弹道倾角保持0°;导弹沿航向飞行至17 710 m处发现目标后,按比例导引俯冲攻击,速度在10 s内由64 m/s快速拉升至111.95 m/s,击中目标。整个飞行过程中,可变弹翼导弹分别按巡航、巡逻和攻击阶段进行弹翼的变形调整,其质量、转动惯量、重心、压心、升力、阻力系数曲线分别如图10~图11所示。

图7 可变弹翼导弹的弹道曲线
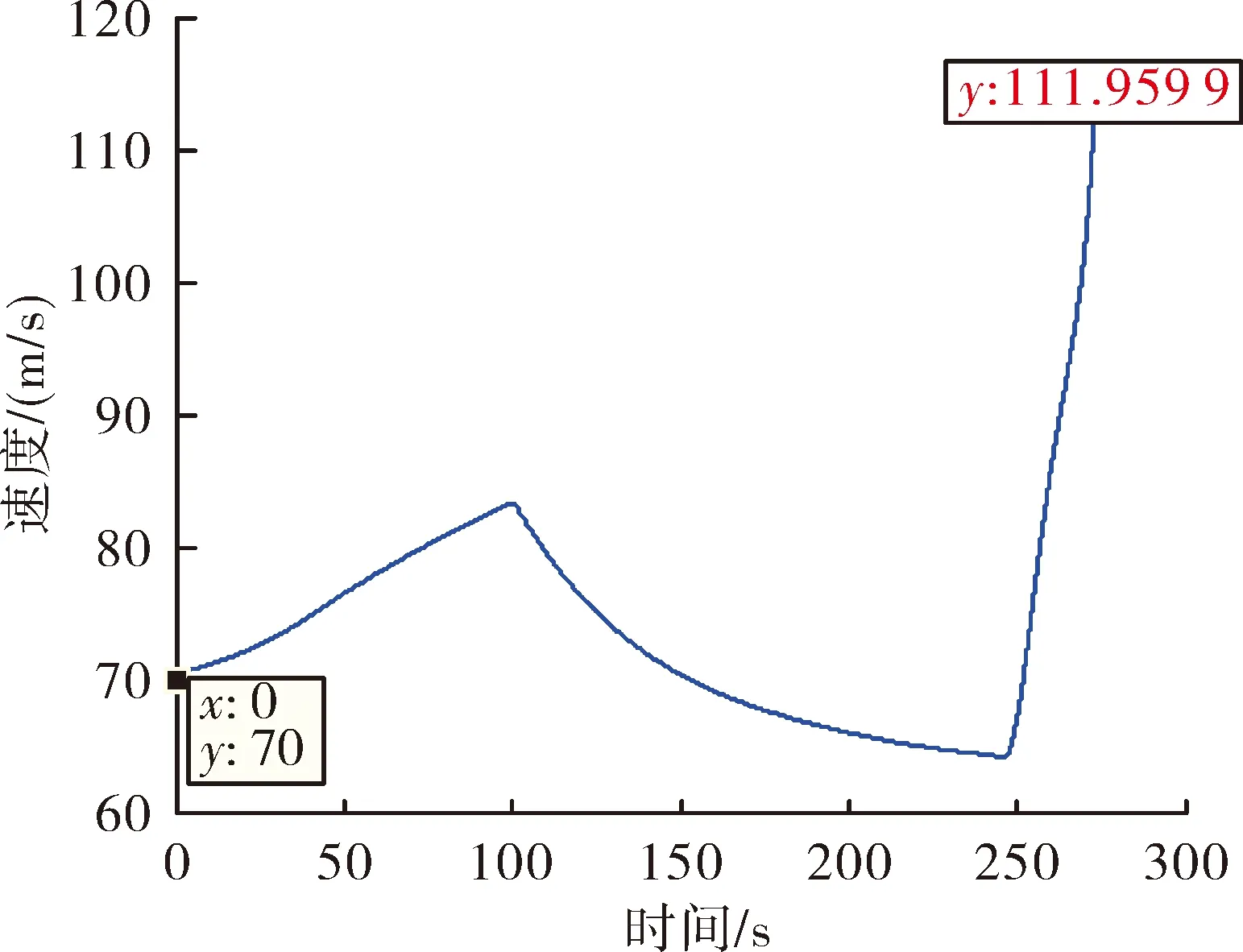
图8 可变弹翼导弹的速度曲线

图9 可变弹翼导弹的弹道倾角曲线
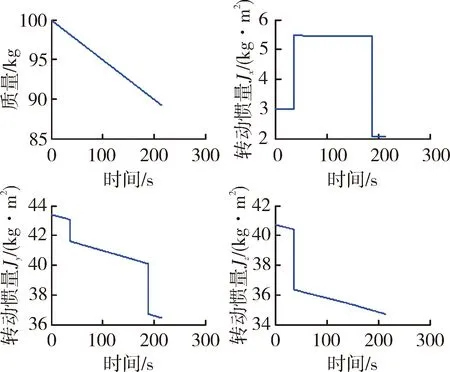
图10 导弹质量、转动惯量曲线
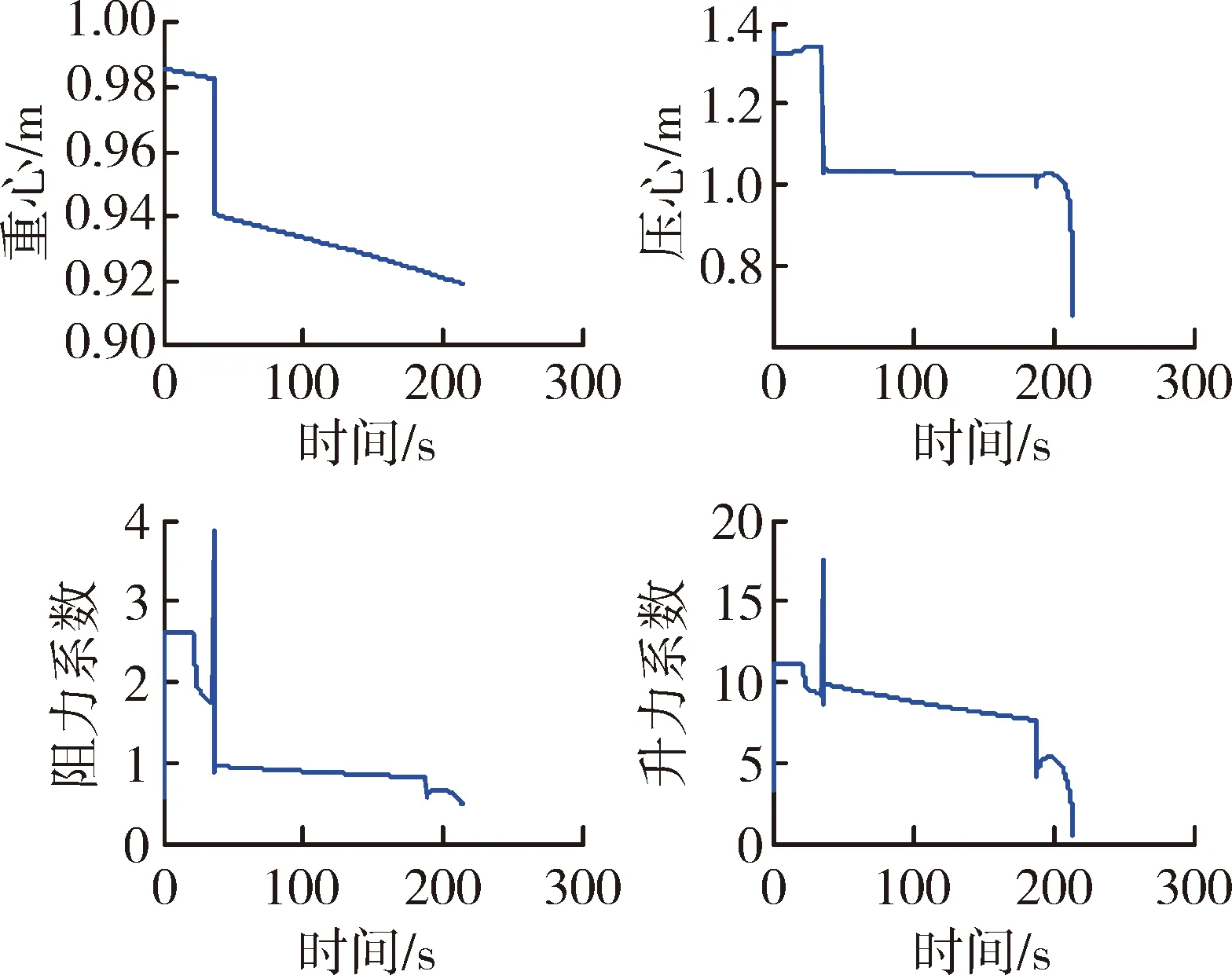
图11 导弹气动参数曲线
4 结论
由仿真结果可知,所设计的弹道方案能够实现可变弹翼导弹巡航段的经济航行、巡逻段的低速长航时侦查以及攻击段的高机动俯冲攻击,满足各作战任务间平滑切换的需求,增强导弹的多功能性,延长导弹的技术战术生命周期。为今后可变弹翼导弹的工程化应用奠定了技术基础。
