基于ARM的惯性敏感器嵌入式信号处理系统设计*
2020-03-30杨鹏翔林宏波邓盼盼
刘 琴,杨鹏翔,林宏波,邓盼盼
(西安现代控制技术研究所, 西安 710065)
0 引言
随着无人战机、巡航导弹以及各种精确制导炸弹的快速发展,现代战争对于小型化、低成本、高精度的精确制导武器的研制尤为重要[1]。惯性导航系统是精确制导武器中重要部件之一,它通过对惯性传感器信号的采集和处理获得载体在导航坐标系下的运动信息,从而解算出导航信息实现目标攻击,信号处理的精度与实时响应速度直接影响目标攻击的准确度,因此惯性导航信号处理系统的设计至关重要。
考虑制导武器应用环境对惯性导航系统体积、精度、成本及通用化的要求,采用捷联惯性导航方案,陀螺仪选用三轴一体光纤陀螺,具有成本低、体积小、动态测量范围大和数字输出等特点[2],加速度计采用石英挠性加速度计,具有成本低、技术成熟度高的优势。
1 系统方案
文中主要实现惯性敏感器信号的采集、实时处理及导航解算,系统主要由电源转换电路、惯性测量单元(三轴一体光纤陀螺仪及加速度计)、加速度计信号采集电路、导航计算机电路及其软件、通讯接口电路组成[3]。系统组成如图1所示。

图1 系统总体结构框图
电源转换电路将外部输入电源转换为系统各电路所需电压;三轴一体光纤陀螺用于测量系统相对惯性空间的角运动,3只正交的加速度计用于敏感系统相对惯性空间的线运动加速度;加速度计信号采集电路将加速度计输出的模拟电流信号转换为数字信号;导航计算机电路采用ARM架构,实现信号采集、通讯、时序逻辑及导航解算等功能;通讯接口电路实现串口通信。
2 各子模块设计
2.1 电源转换电路设计
电源转换电路负责给整个系统供电,其设计输入电压范围为18~32 V;支持两路独立的电源输入及EMI滤波,具有反向通电截止、过流保护等防护功能。
电源转换电路设计输出电压可为三轴一体光纤陀螺组合提供±5 V电源;为加速度计提供±15 V电源、为加速度计信号采集电路提供5 V、3.3 V、1.8 V电源及2.5 V基准电压源;为导航计算机电路提供3.3 V电源;为通讯接口电路提供5 V、3.3 V电源。
2.2 加速度计信号采集电路设计
加速度计输出信号为微电流信号,需要通过转换电路将其变为数字信号发送给导航计算机,因此转换电路对信号转换的准确性与稳定性,将直接影响惯性导航装置的精度。电流信号转换电路的实现方案一般为基于累积效应的电流到频率的转换[4](简称IF转换)和基于逐次逼近的AD转换。
IF转换是通过对电流积分达到电荷平衡实现电流信号转换为频率信号,转换精度高,但组成电路复杂,设计难度大,调试工作量大,占用PCB空间,尤其在大电流输入时由于其发热严重,转换精度性能下降。
AD转换电路设计简单、集成度高、体积小、输入范围宽[5],但为保证其精度、实时性和抗干扰性,AD芯片的选型及其信号处理电路的设计尤为重要。文中采用了AD转换的方式对加速度计输出的电流信号进行转换处理。
2.2.1 信号调理电路设计
加速度计直接输出为电流信号,AD芯片的输入为电压信号,故需先对加速度计输出信号经过电流电压转换。在电流电压转换电路中选用的是具有高共模抑制比、低漂移、轨对轨、低噪声的 LTC2053运算放大器。三路加速度计的输出信号分别通过图2所示的电路图实现电流电压转换。
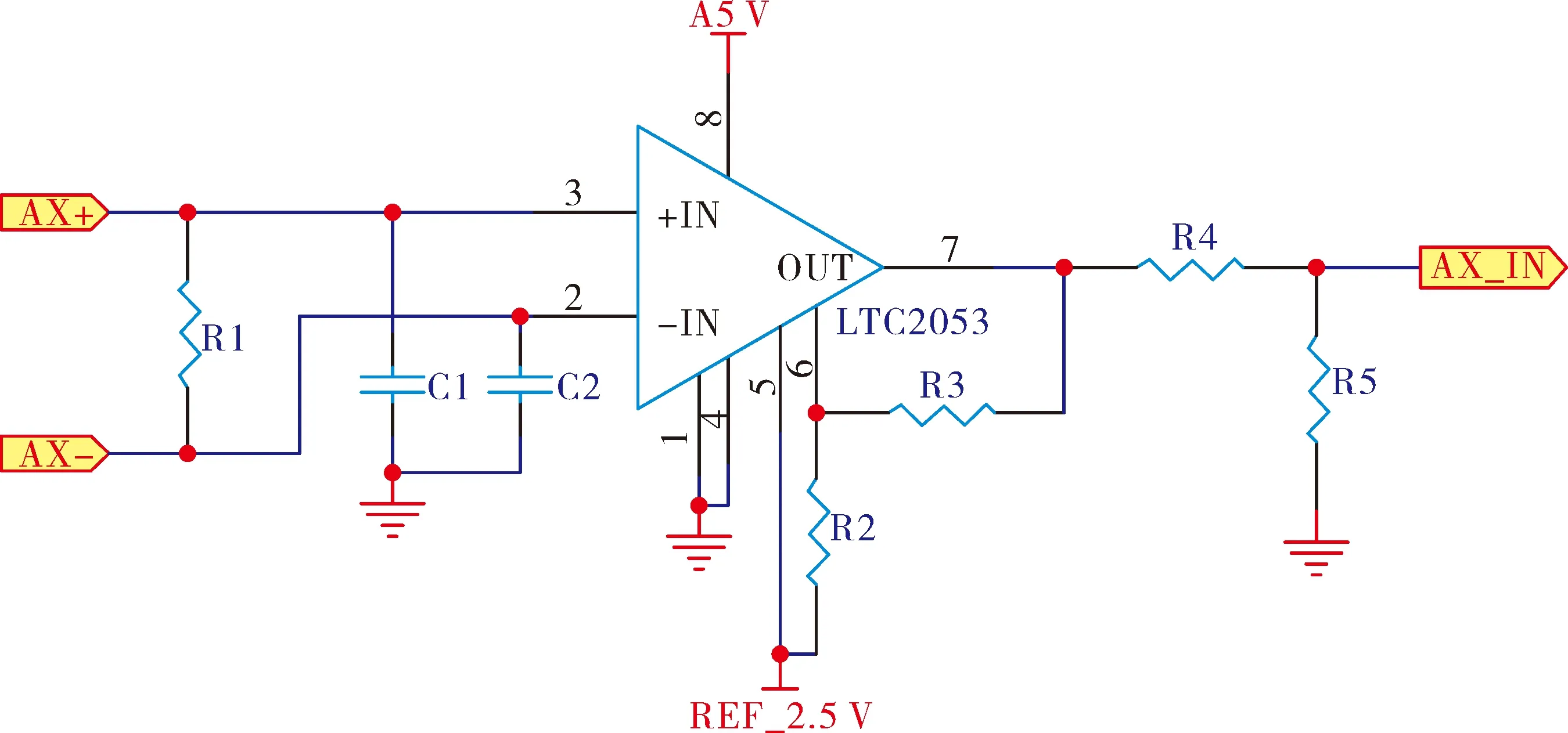
图2 电流电压转换电路图
经过电流电压转换后得到的是单端的电压信号,需要设计一个单端转差分的低噪声模拟信号调理电路。选择全差分运算放大器THS4521来实现单端转差分信号,用运算放大器和 RC 构成的低通滤波器对输入信号进行调理,同时将单端信号转换为差分信号供AD 芯片采集。电路设计简单,且可有效抑制高频噪声,抗干扰能力强。电路设计如图3所示。
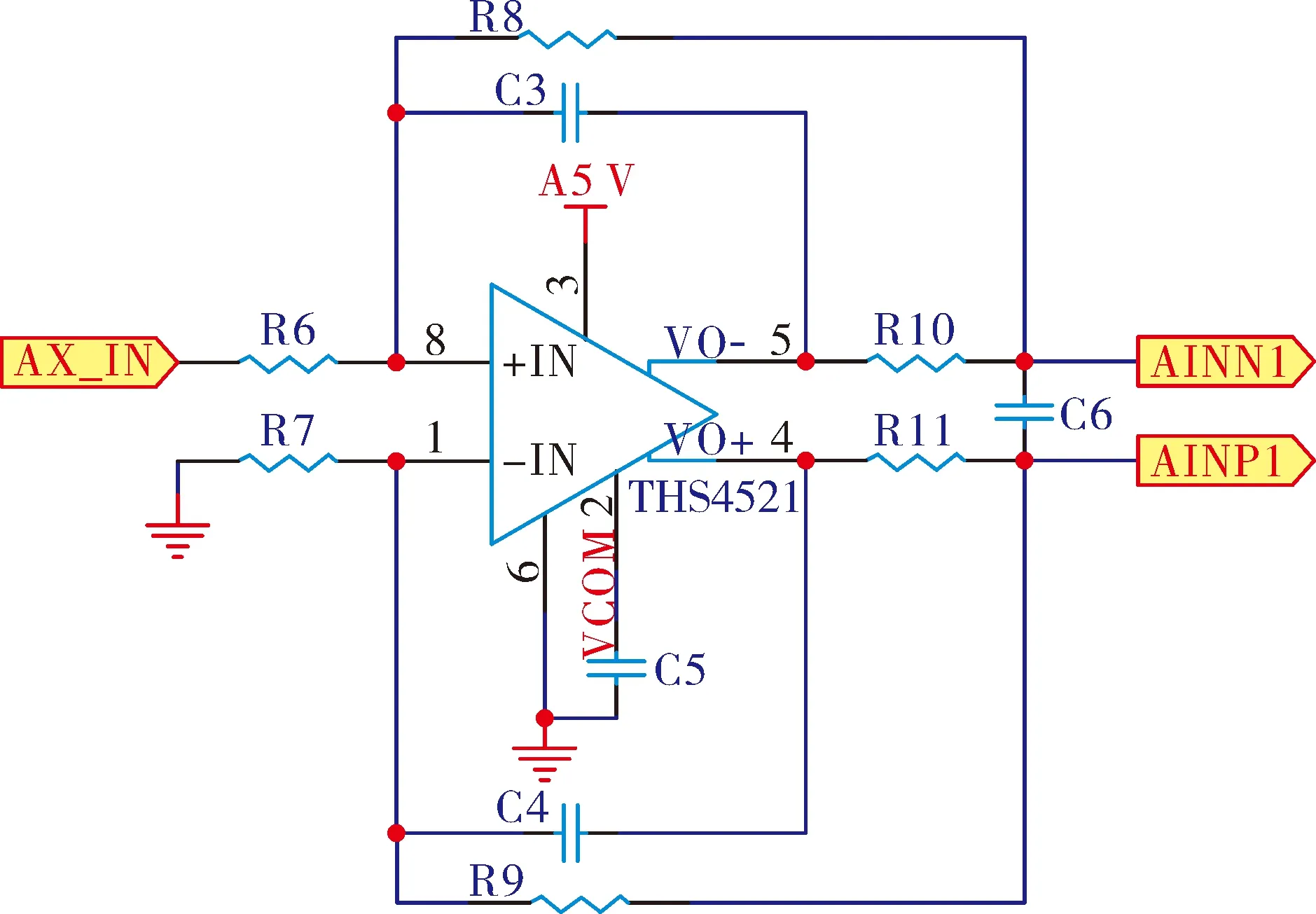
图3 差分调理电路图
2.2.2 AD转换电路设计
加速度计信号采集电路的核心是AD转换器,本设计中选用的是美国 TI 公司具有四通道24 bit分辨率的Δ-Σ 型模数转换器ADS1274[6]。ADS1274的采样速率高,可高达144 ksps,无噪声精度能够达到24 bit,非线性度最大为±0.001 2%,内部集成了多种滤波器,同时ADS1274的配置操作十分简单。ADS1274芯片的内部参考电压为2.5 V,该电压的稳定性直接影响数字信号转换的精度,故采用高精度电压基准芯片REF5025提供参考基准电压。
ADS1274通过SPI接口[7]实现与ARM的信息交互,其SPI主要引脚包括SCLK、SYNC、DRDY及DOUT,实现对ADC的控制及数据读取。
2.3 导航计算机系统设计
2.3.1 导航计算机电路设计
导航计算机是整个系统的核心,采用ARM作为专门的数字信号处理器,主要完成信号采集、初始对准、导航解算及通信功能。ARM微处理器具有较高的解算速度和丰富的接口[8],能同时采集多路数字和模拟信号,具有成本低、体积小、功耗低等优点。选用ST公司的ARM处理器STM32F765[9],其工作频率高达216 MHz,462DMIPS/2.14DMIPS/MHz(Dhrystone2.1) DSP指令,双模Quad SPI,属于 STM32 中运行速度较快的一款处理器。STM32F765的外围电路主要包括时钟电路、复位电路、启动方式配置电路、JTAG仿真器接口电路等。
2.3.2 导航计算机软件设计
ARM的底层驱动软件实现硬件与软件之间的信息交互,完成对硬件电路的控制和数据读写;系统软件主要完成系统的任务分配、通讯及功能实现[10]。软件设计采用模块化、结构化的方法,由C语言编写,可进行在线仿真,主要流程图如图4所示。其中系统初始化完成各参数变量初始化、串口配置等功能;自检模块通过采集惯性器件的信息来判断其是否工作正常,同时检测各串口功能及系统当前的工作状态并输出结果;数据采集模块主要采集通过RS422串口的光纤陀螺仪信息和SPI总线的加速度计信息;通讯模块负责与其他设备进行通讯,并在导弹飞行过程中输出弹体相对发射坐标系的姿态、速度、位置、角速度和加速度等导航信息;惯性导航解算模块是利用光纤陀螺仪信息、加速度计信息及其他导航信息进行导航解算。
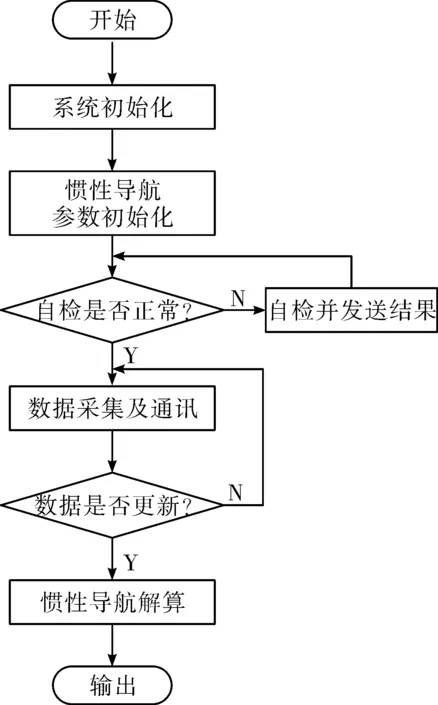
图4 惯性导航系统软件流程图
2.4 通讯接口电路设计
系统主要通过串行接口与外界进行通讯,选用ADI公司隔离型 RS422 收发器ADM2582 ,其接口为差分传输方式,芯片内部集成磁隔离电源,无需外部隔离电源供电,抗干扰能力强,传输距离远,可5 V或3.3 V供电,传输速率高达16 Mbit/s,满足系统对外通讯的要求。
3 实验结果和分析
根据某型空地导弹通用惯性导航系统的要求,选用的三轴一体光纤陀螺输入量程为-800~800°/s;加速度计测量范围为-20~20g,标度因数为0.7 mA/g。对应加速度计信号采集电路的主要技术要求为:输入电流范围为-14~14 mA,非线性度(正负通道)≤5×10-4。
3.1 加速度计信号采集性能分析
为验证加速度计信号采集电路的性能,采用FLUKE5522A基准源输出的高精度电流信号来模拟实际加速度计信号,给系统其中一路加速度计采集端口输入不同电流值,分别记录不同输入电流时的原始转换测量数据,典型测试数据结果如表1所示。

表1 典型测试结果
测试结果计算可得其正向线性度为3.9×10-5,负向线性度为1.35×10-4,均满足系统要求,验证了加速度计信号采集电路设计的正确性。实验结果表明:采用AD转换电路方案可行,其非性度等性能与IF转换电路在一个数量级,大大简化了设计及调试工作量;同时AD转换电路的电流输入范围相对于IF转换电路,不受拘束,应用范围更广。
3.2 系统性能分析
为验证系统总体性能,进行了跑车实验,并利用在同平台下的基于DSP+FPGA的高精度卫星组合导航系统进行了相关实验作为参考基准。将采用纯惯性导航系统的输出信号与卫星组合导航系统输出信号进行比较,绘制出其姿态、姿态误差、位置及位置误差曲线如图5~图8所示。
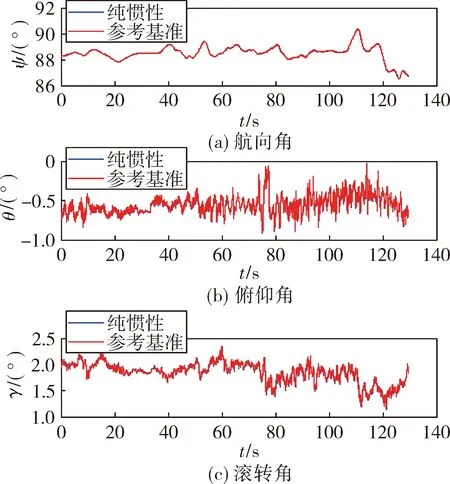
图5 惯性导航与参考组合导航的姿态角曲线
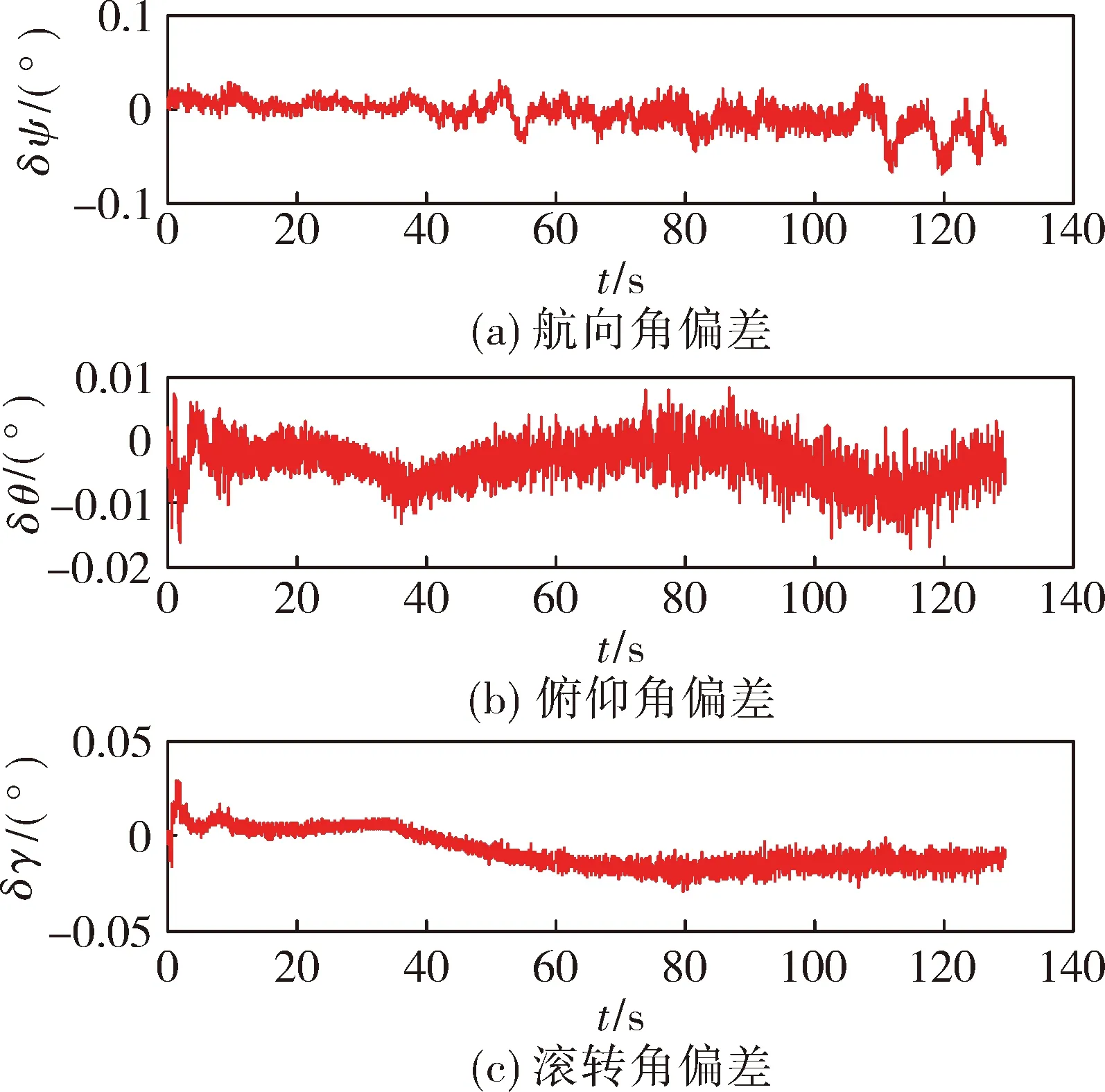
图6 惯性导航姿态角与参考姿态角的偏差曲线
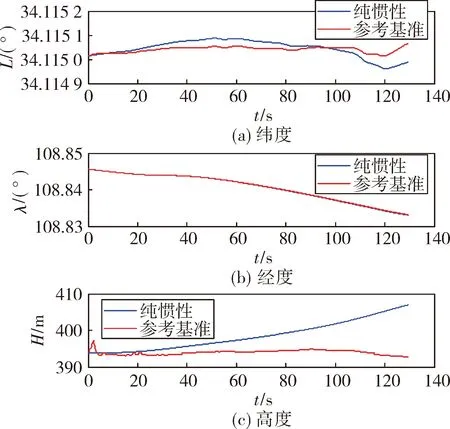
图7 惯性导航与参考组合导航的位置曲线
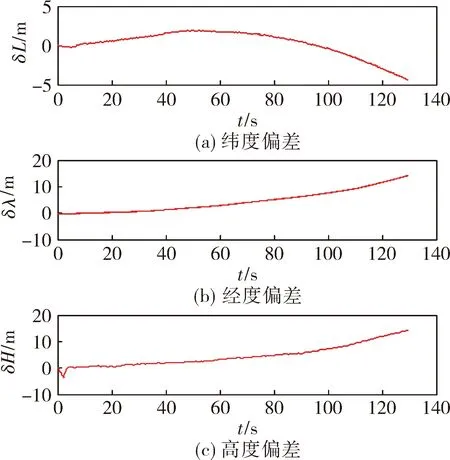
图8 惯性导航与参考位置的偏差曲线
计算出纯惯性导航的姿态角误差均方根(RMS)为:航向角误差0.016°,俯仰角误差0.005°,滚转角误差0.013°;速度误差均方根(RMS)为:北向速度误差0.11 m/s,天向速度误差0.1 m/s,东向速度误差0.07 m/s;120 s纯惯性导航最大位置误差为:纬度误差-4.45 m,经度误差13.09 m,高度误差14 m。
从实验曲线与数据可以看出,文中所采用的纯惯性导航系统的姿态、位置及速度精度较高,与高精度卫星组合导航系统相差不大,可满足大多数精确制导武器惯性导航系统的要求。
4 结论
设计了一种基于ARM的嵌入式惯性导航信号处理系统,实现了三轴一体光纤陀螺和加速度计的信号实时采集及处理,系统的导航解算等。通过实验验证了系统满足设计要求,具有小型化、低成本、高精度等特点,可广泛应用于多种惯性导航装置。
