负脉冲混合多模态输入整形器抑振鲁棒性分析
2020-03-28魏玉兰欧鹏飞张清珠
李 兵 ,魏玉兰 ,欧鹏飞 ,张清珠
(1.湖州师范学院工学院,浙江 湖州 313000;2.麦吉尔大学采矿与材料工程系,蒙特利尔,加拿大 H3A0C5)
1 引言
机器人在先进制造领域中被广泛使用,为提高机器人的执行速度会减少主要零部件的重量,但机器人在高速移动中会产生较大的残余振动,这会导致机器人的运动精度降低[1-2]。当机器人运动速度较快或主要零部件刚性较低时,高阶模态的残余振动也随之提高,导致机器人运动精度进一步降低,常见的单模态振动控制策略难以同时抑制多个模态的残余振动[3-5]。多模态输入整形器可以解决这个问题[6-8]。为提高输入整形器的响应速度,可采用负脉冲建立输入整形器[9]。对于机器人各阶振动频率范围差异较大时,可以使用混合型多模态输入整形器,负脉冲混合输入整形器在减少多个模态振动的同时能加快系统的响应速度[10]。当机器人运行参数发生变化时,直接影响机器人的运动状态和机器人残余振动的响应。输入整形器的鲁棒性就是其不灵敏度,其反映了机器人运行参数或共振频率与机器人残余振动响应之间的关系,体现了输入整形器抑制振动的能力受外界参数变化的影响程度[3]。对输入整形器的不灵敏度进行分析,能得到各阶模态每个频率点抑制残余振动的比例和有效抑振的频率范围。因此,不灵敏度是评估输入整形器性能的关键指标。
2 基本原理
2.1 抑振原理
多模态输入整形器是将系统多个单模态输入整形器卷积而成,它可以同时减少系统多模态的残余振动,其控制策略的原理[7],如图1所示。
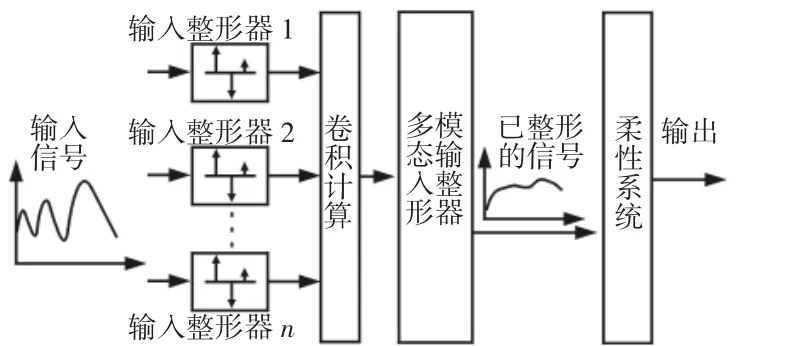
图1 多模态输入整形控制的原理图Fig.1 Schematic of Multiple-Modal Input Shaping Control
正脉冲多模态输入整形器能抑制多个模态的振动,但系统响应时间较慢;负脉冲多模态输入整形器能有效改善该缺点,使响应时间缩短;当使用不同类型单模态输入整形器构建时,称为混合多模态输入整形器,其也分为正脉冲和负脉冲两种类型,前者的响应时间要快于后者,但后者抑制的残余振动要稍多于前者[10]。
负脉冲混合多模态输入整形器(NHMS)是针对系统各阶振动频率范围差异较大的情况,它可以加快系统响应时间,同时减少多模态的振动。NHMS是将不同类型的负脉冲单模态输入整形器(NZV、NZVD、NEI)卷积而得。
例如,对于某机器人系统,已知前n阶模态的共振频率与对应的阻尼比,则各阶负脉冲单模态输入整形器(NIS)为:

式中:NISi—第i个模态构建的负脉冲单模态输入整形器;m—输入整形器的脉冲数量,则对于第i个单模态整形器NISi的第j个脉冲的幅值和输入时间可用Aij和tij表示。通过卷积计算,一个多模态输入整形器(NIS-NIS)为:

采用上述方法可建立六种NHMS,以两模态为例,六种负脉冲混合两模态输入整形器(NHTS)分别为:NZV-NZVD、NZVD-NZV、NEI-NZVD、NZV-NEI、NZVD-NEI、NEI-NZV。
2.2 鲁棒性分析原理
鲁棒性是评估输入整形器抑振能力强弱的关键指标,可对输入整形器的灵敏度曲线分析而得。通过计算每个频率点抑制残余振动的百分比可获输入整形器的灵敏度曲线,该曲线表达了频率与抑制振幅比例之间的变化关系[3]。当残余振动幅值低于5%时,灵敏度曲线的宽度为输入整形器的不灵敏度,它代表输入整形器在该阶模态下能有效减小残余振动的频率范围,即输入整形器在该频率范围内能使残余振动的幅值低于5%。不灵敏度越高,输入整形器减少振动的频带越宽。当系统使用输入整形器时,可用方程(3)表示其残余振动[3]。
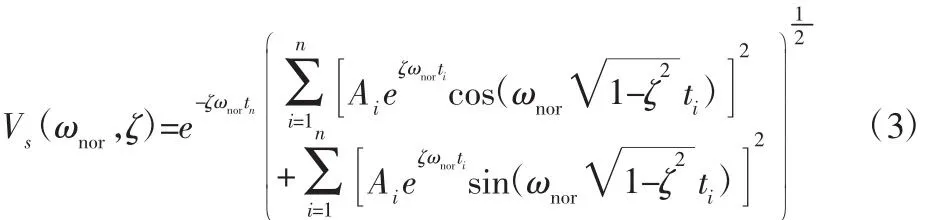
式中:Vs(ωnor,ζ)—在每一个频率点残余振动幅值的百分比;ωnor—正则化频率,其可表示为:

式中:ωs—实际共振频率;ωc—理论共振频率。
对于NZV负脉冲输入整形器,构建的约束条件是令方程(3)为0,即令Vs=0,但NZV的不灵敏度较低;而NZVD输入整形器拥有较高的不灵敏度,构建NZVD的约束条件除了方程(3)之外还增加了方程(5),即令残余振动的导数为0[3]。

NEI拥有最高的不灵敏度,其以削弱抑制振动的能力为代价而提高不灵敏度,构建NEI的约束条件为:

其中,ωp和ωq两频率点分别位于ωnor左右两侧且对称,在这两点上的残余振动为0;在ωnor频率点处的最大振动幅值被限制为Vd(常取5%),而在ωp和ωq两频率点之间的振动小于Vd,从而加宽了有效抑振的频率范围,提高了不灵敏度[3]。
使用方程(3)对输入整形器进行仿真可获得其灵敏度曲线。该方法对于单模输入整形器是有效的,对于多模输入整形器也同样适用,也可用于NHMS。对于多模态输入整形器,通过同时分析各个模态抑振频率的宽度可获得其不灵敏度。
3 机器人系统
这种机器人由3组相同的分支在平面内对称组装而成,其在平面内具有3个自由度(1个转动、2个移动),称为3-DOF并联机器人[10],如图2所示。通过降低机器人自重以加快运动速度,采用一种柔性臂连接着移动平台与直线滑块,但较大的残余振动却影响系统的运动精度。

图2 机器人Fig.2 Robot
机器人的移动平台结构为等边三角形,直线滑块的移动长度为400mm,三个柔性臂均采用铝合金材质,且形状、大小、安装方式完全一样,长200mm、宽30mm、厚 2mm、密度 ρ为 2.77×103kg/m3。根据实验测量和分析,可得柔性臂第一阶共振频率和阻尼比分别为76.6Hz和0.057,而第二阶分别为231.2Hz和0.017[10]。
4 仿真计算与特性分析
4.1 输入整形器的灵敏度曲线
根据上述机器人的振动参数,分别建立NZV-NZVD、NZVDNZV、NEI-NZVD、NZV-NEI、NZVD-NEI 和 NEI-NZV 这 六 种NHTS,并在Mathematica计算软件里进行仿真计算,以单位阶越信号为输入,分析各种输入整形器对系统输出响应的影响,如图3、图4所示。
从图3和图4可看出,这六种NHTS抑振效果显著,且能缩短系统的响应时间,但振动抑制特性存在差异,可以使用灵敏度曲线分析造成差异的原因,单模态与NHTS的灵敏度曲线,如图5所示。

图3 NZV-NZVD、NZVD-NZV、NEI-MZVD响应Fig.3 Responses of NZV-NZVD,NZVD-NZV and NEI-MZVD

图 4 NZV-NEI、NZVD-NEI、NEI-NZV 响应Fig.4 Responses of NZV-NEI,NZVD-NEI and NEI-NZV
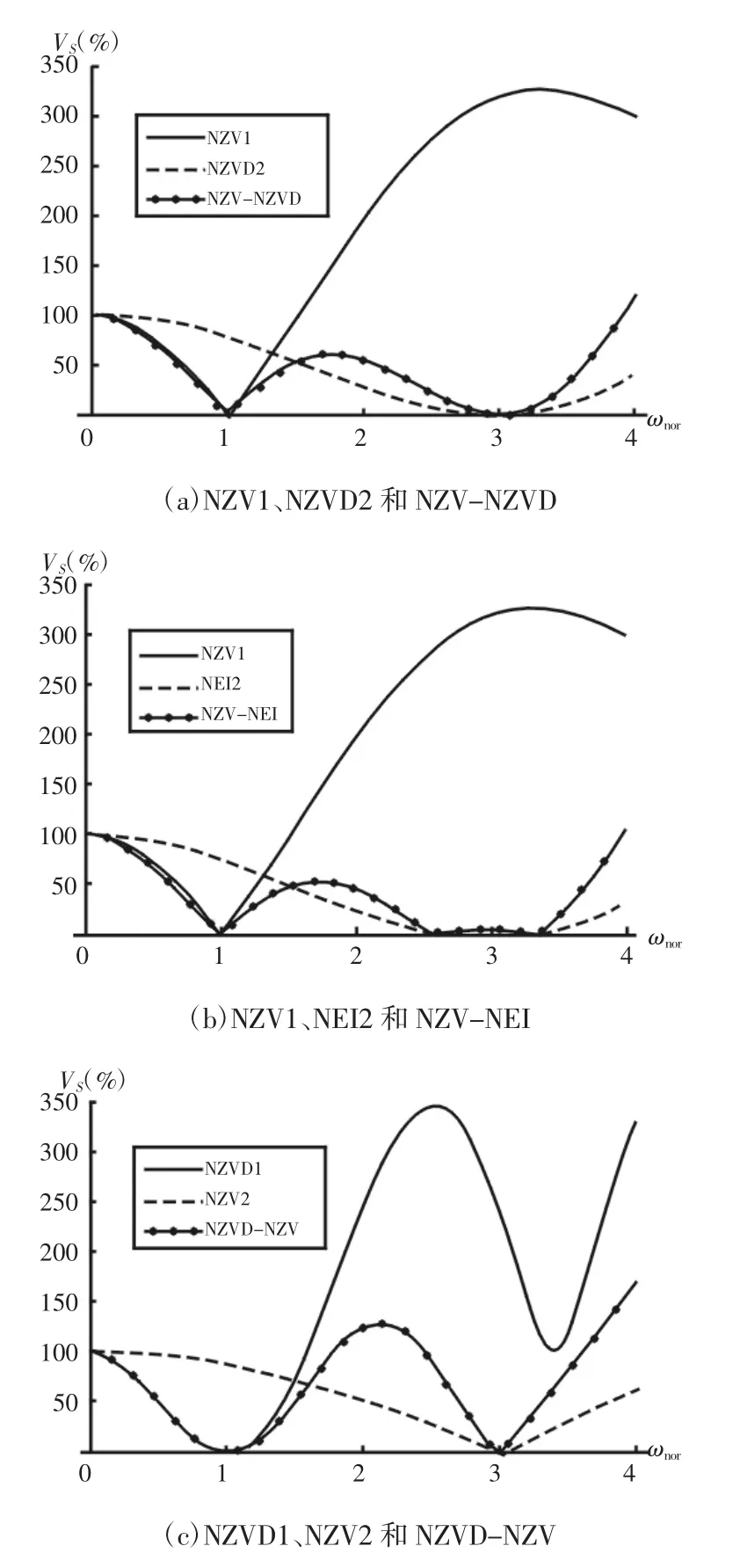

图5 单模态整形与NHTS的灵敏度曲线Fig.5 Sensitivity Curves of Single-Modal Shaping and NHTS
从图5可得,一阶负脉冲单模态(NZV1、NZVD1、NEI1)输入整形器都能明显减少机器人一阶模态的残余振动,但对于二阶模态的振动抑制效果较差;二阶负脉冲单模态(NZV2、NZVD2、NEI2)输入整形器只对二阶模态振动的抑制有效。而这六种NHTS对前两阶模态振动的抑制效果都很显著,其鲁棒性明显好于单模态输入整形器;且在前两个模态中,抑振频带较宽说明其不灵敏度较高,但均小于对应的单模态输入整形器。
此外,这六种新型输入整形器前两阶的不灵敏度值存在差异。对于一阶模态,NEI-NZVD具有最大的不灵敏度,NZV-NZVD具有最小的不灵敏度;而二阶模态,NZVD-NEI具有最大的不灵敏度,NZVD-NZV具有最小的不灵敏度。对于NEI-NZVD,其二阶模态的灵敏度曲线产生了较明显的偏移,即二阶模态的频率误差减小20.8%时其减振效果将显著降低,而频率误差增大到37.4%时减振效果才会降低。这六种NHTS各阶抑振频带宽度以及频率误差范围,若系统频率超出该频率范围时,振动的幅值将不能被限制在5%之下,如表1所示。由于3-DOF并联机器人前两个模态的振动频率变化范围较小,二阶模态振动频率的变化范围要大于一阶模态,且期望获得较快的系统响应速度,因此综合性能最好的NHTS是NZV-NZVD。

表1 频带与频率误差Tab.1 Frequency Bands and Errors
4.2 脉冲类型与混合控制策略的影响
为分析脉冲类型(正脉冲、负脉冲)和混合控制策略对多模态输入整形器的影响,可对比负脉冲多模态、正脉冲混合多模态(PHMS)、NHMS的灵敏度曲线,以两模态为例,如图6所示。
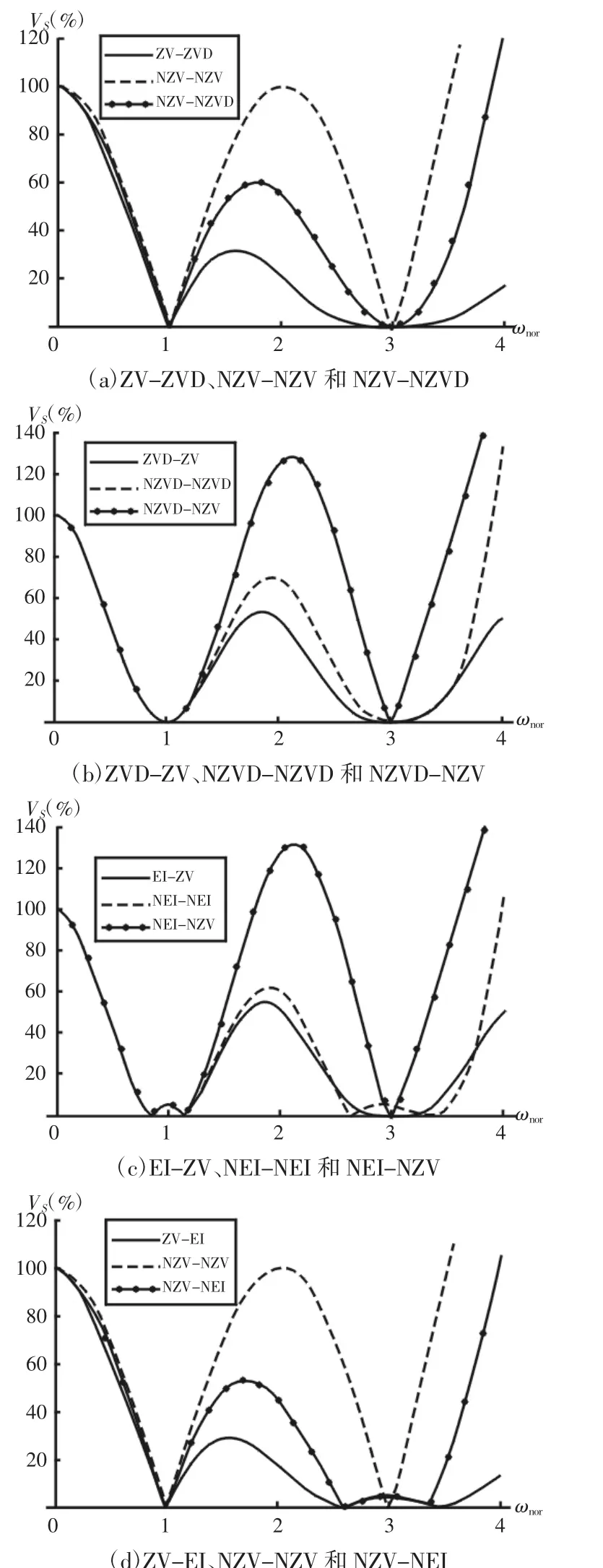
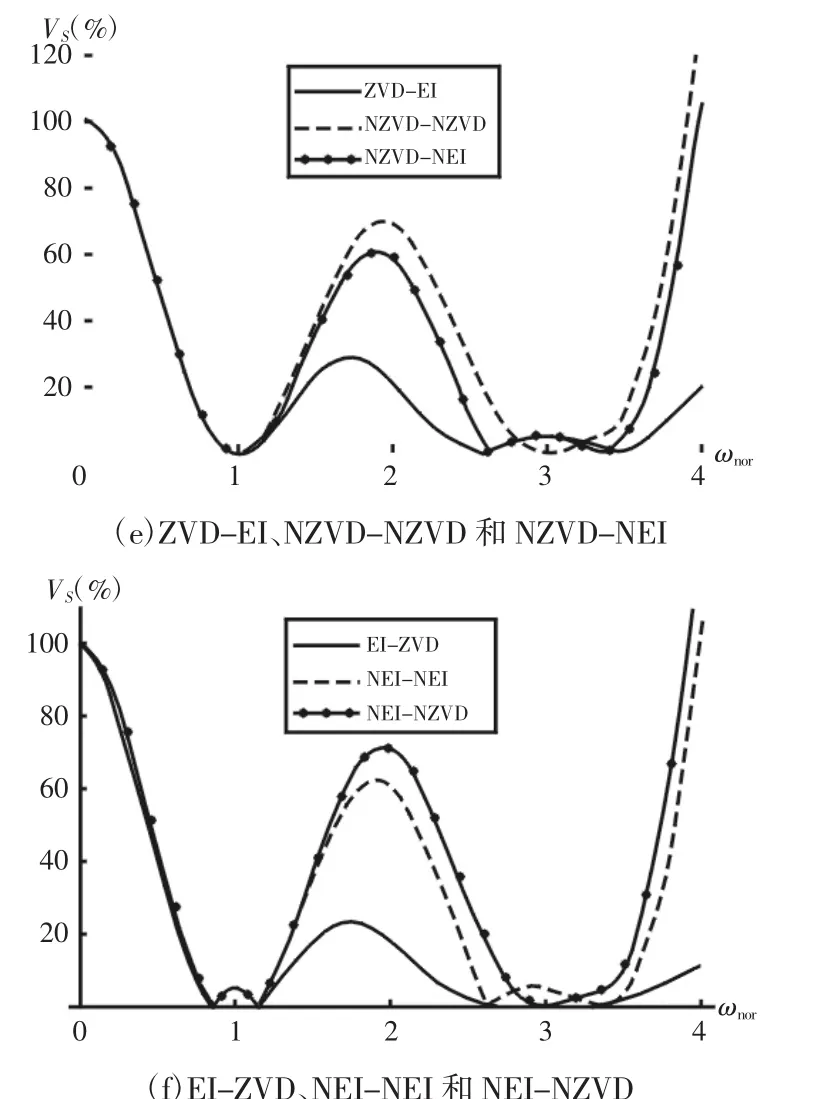
图6 脉冲类型与混合策略对灵敏度曲线的影响Fig.6 Effect of Impulse Type and Hybrid Strategy on Sensitivity Curves
由图6可得,这三类输入整形器的灵敏度曲线存在差异。对于一阶模态,正脉冲混合两模态的不灵敏度略大于NHTS;但对于二阶模态,前者要比后者宽得多。这意味着PHMS比NHMS能抑制更多的残余振动,这与从系统响应曲线分析中获得的结论相一致[10]。因此,可得脉冲类型对混合多模态输入整形器的一阶抑振的不灵敏度影响较小,但对二阶影响较大,负脉冲会使前两阶模态的抑振频带变窄,从而使系统响应时间加快。
另外,对于负脉冲多模态与NHMS,以NZV-NZV、NZVDNZVD、NZV-NZVD、NZVD-NZV为例,NZV-NZV与NZV-NZVD、NZVD-NZVD与NZVD-NZV的一阶不灵敏度非常接近,而二阶相差较大;NZV-NZV与 NZVD-NZV、NZVD-NZVD与 NZVNZVD的一阶不灵敏度差距较大,而二阶的不灵敏度存在较小的差距。这主要由构成各阶单模态输入整形器的类型决定的。由此可得,对于负脉冲多模态与NHMS,如果一阶模态输入整形器的类型一样而二阶不同时,则它们的一阶不灵敏度非常接近,而二阶相差较大;而当二阶模态输入整形器的类型一样而一阶不同时,这两个输入整形器的一阶不灵敏度差异较大,二阶不灵敏度也存在较小的差异。因此,对于混合控制策略,各阶单模态输入整形器的鲁棒性决定了多模态输入整形器各阶抑振鲁棒性的大小。
4.3 多模态输入整形器的选用原则
多模态输入整形器的类型包括正脉冲、负脉冲、正脉冲混合、负脉冲混合四种类型。当要求抑制更多残余振动幅值而对时间响应要求不高时,可选择正脉冲多模态输入整形器;但要提高系统响应速度且可适当降低振动抑制能力时,可选择负脉冲多模态输入整形器;对于各阶振动模态的振动特性(频带宽度、振幅)相差较大时,为使各阶模态的振动特性与输入整形器的鲁棒性相匹配,不会产生过渡浪费或不足,可选择正脉冲混合多模态输入整形器;当要求更快的响应时间且可适当降低振动抑制能力时,应选择NHMS。
对于NHTS,当系统第一阶模态的振动频带较窄且第二阶模态较宽时,可使用NZV-NEI能减少更多的残余振动。相反,当系统第一阶模态振动频带较宽而第二阶较窄时,可使用NEI-NZV。NZVD-NEI在所有NHTS中具有最好的鲁棒性,但具有最慢的系统响应时间;而NZV-NZVD的鲁棒性较差,但具有最快的系统响应时间。因此,为了实现系统响应速度最快、振动抑制最多或鲁棒性最好等目标,可根据系统各阶模态的频带宽度、振动幅值和期望的系统响应时间选择最适合的多模态输入整形器。
5 结论
叙述了负脉冲混合多模态输入整形控制策略的构建方法与鲁棒性分析原理。针对3-DOF机器人分别构造六种NHTS输入整形器,利用仿真得到了其灵敏度曲线,并获得了这六种NHTS前两个模态的抑振频带宽度与频率误差范围,其鲁棒性明显优于单模态输入整形器,NZVD-NEI具有最好的鲁棒性,但具有最慢的系统响应时间,而NZV-NZVD具有较差的鲁棒性,但具有最快的系统响应时间,NZV-NZVD抑振的综合性能最好。脉冲类型对混合多模态输入整形器的一阶抑振影响较小,但对二阶抑振影响较大,负脉冲会使二阶模态的抑振频带变窄。对于混合控制策略,各阶单模态输入整形器的鲁棒性决定了多模态输入整形器各阶抑振鲁棒性的大小。因此,为满足系统响应速度最快、振动抑制最多或鲁棒性最好等要求,可根据系统各阶模态的频带宽度、振幅大小及期望的系统响应时间选择最适合的多模态输入整形器。