剪叉式高空车转向机构结构分析
2020-03-27陆进添刘丹邓安田
陆进添, 刘丹, 邓安田
(三一帕尔菲格特种车辆装备有限公司研究院,江苏南通226000)
0 引 言
转向机构是高空作业车转向系统的主要执行组件,为适应高空车在狭小的空间移动转向等工况,需要转向机构能够使作业车有较小的转弯半径,同时尽可能减轻或避免磨胎,对转向机构的研究有利于增强高空车的转向性能、改善磨胎、减小转向力和增强操作稳定性。
1 转向机构简介
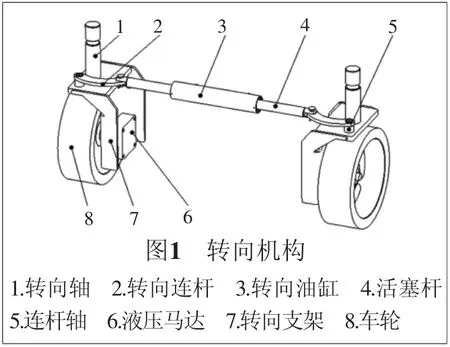
单油缸式的转向机构如图1所示,具有良好的转向性能,能够适应高空作业车的转向要求。对转向油缸的进出油口进行控制,驱动活塞杆运动,活塞杆的运动带动转向连杆,转向连杆作用于连杆轴,使转向轮克服地面的摩擦阻力矩,连同转向支架一起绕转向轴转动,从而达到转向目的。
2 转向机构分析
2.1 转向机构各构件的位置分析
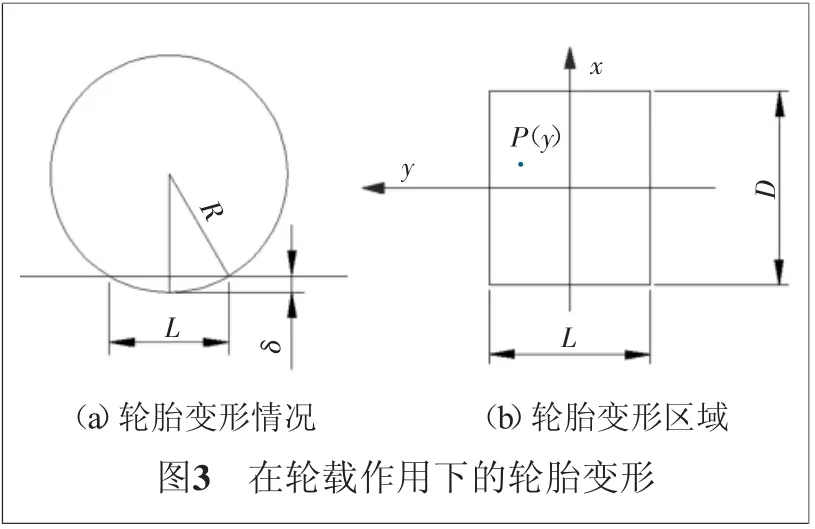
确定转向轮的位置可以分析转向系统的转向性能和转向特性,确定转向连杆的位置是进行转向机构受力的必备前提,因此在受力分析之前需要进行转向机构的位置分析。转向机构的位置参数如图2所示,长度参数的含义如表1所示,角度参数在引用时指明含义。


表1 某系列的转向机构设计参数
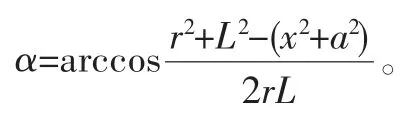
对于从车尾向车头看右转 向 轮( 图2 左边),连杆与活塞杆铰接的位置 为 变量,则其位置为(x,-a)。由余弦定理可得连杆与摇杆的夹角(传动角)α为
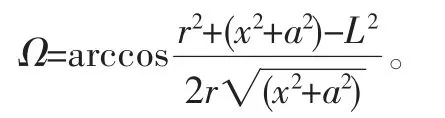
辅助角Ω为
液压缸杆右端转动副位置与y方向的夹角ψ为
ψ=arctan(x/a)。
初始位置摇杆与x负方向的夹角φ为
φ=arctan(c/d)。
车轮转角ω(向外侧为正)为
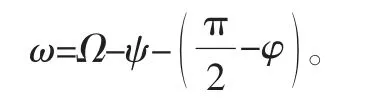
则连杆与x轴方向的夹角为
β=(ω-φ)+α。
同理,对于左侧车轮连杆与活塞杆铰接的位置为变量x,则左侧的位置为(x′,-a)。
且有
x′=x+s。
由余弦定理可得连杆与摇杆的夹角(传动角)为

辅助角Ω′为
液压缸杆右端转动副位置与x负方向的夹角ψ′为
ψ′=arctan[a/(D-x′)]。
初始位置摇杆与x方向的夹角φ′为
φ′=arctan(c/d)。
车轮转角ω′(向外侧为正)为
ω′=π-φ′-Ω′-ψ′。
则连杆与x轴方向的夹角为
β′=α′-ω′-φ′。
即得到两侧车轮转角对活塞杆伸出量的变化关系:
其中活塞杆的伸出量为
2.2 原地转向阻力矩的计算
车辆的转向阻力矩是由于地面和转向轮之间的相互作用及转向系统内部摩擦共同作用产生的[1],车轮静态下的转向阻力矩是最大的转向阻力矩[2]。转向系统的转向力主要用于克服转向阻力矩以实现转向,因此若要确定液压油缸的转向压力,首先应确定车轮与地面之间的最大原地转向阻力矩。
由作业车的各种工况可计算出转向轮单轮最大轮载FN。
实心轮胎的宽度为D,下沉量与轮载关系如表2所示,表2数据的线性拟合为:
y=245x+535;
R2=0.98。
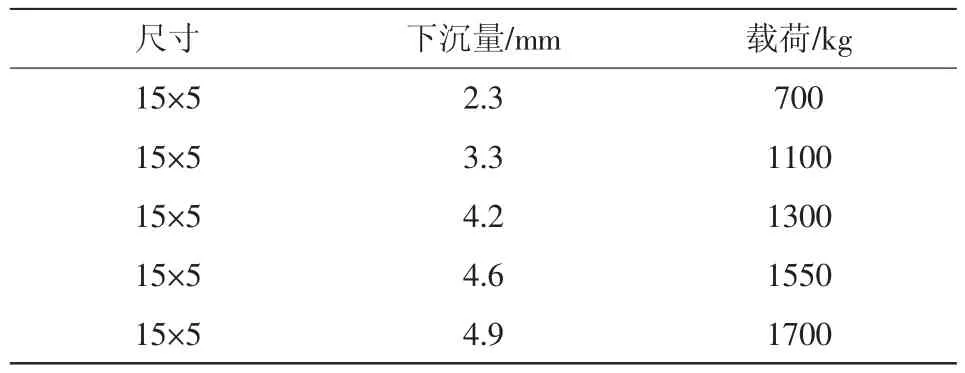
表2 载荷与下沉量关系
由此可得轮载FN对应的变形量为δ,对应轮胎的变形情况和变形区域如图3所示,接触区域近似成矩形,根据几何关系可得轮胎与地面接触区域长度为

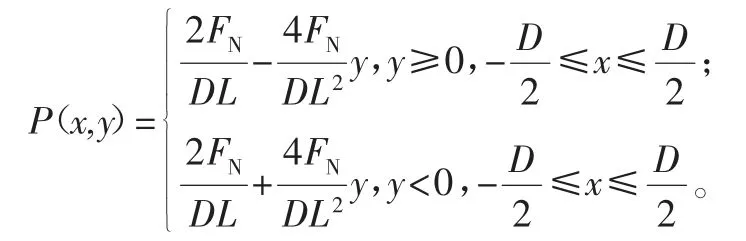
假设轮胎变形区域的压强从中部向两边线性递减,接触区域的压强可表示为:

接触区的压力是接触区压强的综合作用效果,则
可得Pmax=2FN/(DL)。
于是接触区域的压强为:
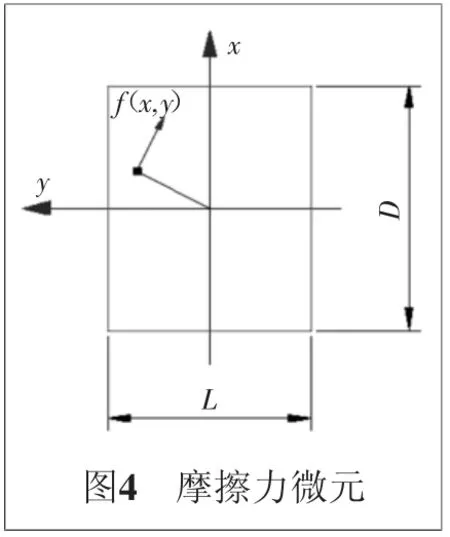
选取摩擦力微元,如图4所示,在一点Q(x,y)处的摩擦力微元为
df(x,y)=μ(x,y)P(x,y)dS=μ(x,y)P(x,y)dxdy。
其中,滑动摩擦因数μ(x,y)=μ=0.7。
此微元所对应的阻力矩为
dM(x,y)=rdf(x,y)。
于是,在整个接触区域Ω的原地转向阻力矩为
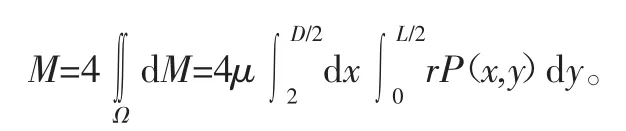
即为

代入相关数值直接在Mathematic软件中进行求解,即可得到数值解,以及两种假设下转向阻力矩的差异。
2.3 转向机构受力分析
原地转向阻力矩是转向机构阻力的主要来源,转向机构的受力分析图如图5所示,其中:L表示连杆、Y表示摇杆、H表示活塞杆、J表示机架、F表示力、1表示右侧转向、2表示左侧转向。

对摇杆由力矩平衡得:
M-rFLYsinα=0;M-r′FLY′sinα′=0。
由于连杆是二力杆,结合牛顿第三定律则,有:
FLY=FYL=FHL=FLH;FLY′=FYL′=FHL′=FLH′。
对活塞杆受力平衡有:
FHLcosβ-F=0;FJH+FLHsinβ=0;
FHL′cosβ-F′=0;FJH′+FLH′sinβ=0。
转向机构的各个部件的受力情况如表3所示。
由此可确定油缸压力为

所对应的压力曲线如图6所示,可确定油缸的最大压力。

表3 部件受力结果
3结论
根据设计需要,本文采用解析法对转向机构的组成部件的位置和受力进行理论推导,确定了各组成部件的位置变化关系及传动角的性能参数。根据实心静音轮胎的承载曲线,结合轮胎与地面的接触形状,通过元素法确定了高空作业车的原地转向阻力矩的计算方法,基于原地转向阻力矩的计算得到了油缸压力随活塞杆伸缩量的变化关系,确定了液压油缸所需最大压力。研究结果对剪叉式高空作业车转向系统的设计提供了依据。

