基于遗传算法的电静压伺服系统模型参数辨识
2020-03-27张春龙赵迎鑫郝伟一
张春龙,赵迎鑫,张 朋,郝伟一,冯 伟
基于遗传算法的电静压伺服系统模型参数辨识
张春龙,赵迎鑫,张 朋,郝伟一,冯 伟
(北京精密机电控制设备研究所,北京,100076)
为了优化模型仿真的控制系统参数,针对电静压伺服系统(Electro-Hydrostatic Actuator,EHA),建立控制器、电机、液压作动器模块化模型,根据各模块输入输出量的试验数据,采用最小二乘法对系统模型参数进行辨识,并将辨识结果导入遗传算法的初始种群,进一步对系统模型参数进行优化,得到系统的精确模型。结果表明,优化的辨识结果在时域和频域都更为精确的逼近实际系统,匹配程度在90%以上,证明该方法的可行性。
电静压伺服;遗传算法;最小二乘法;参数辨识
0 引 言
电静压伺服系统(Electro-Hydrostatic Actuator,EHA)作为功率电传的一种基本实现形式,因其重载能力强、效率高、抗污染能力强、易冗余等突出特点,是未来多电化航天运载器大功率推力矢量控制作动系统的主流方案[1,2]。
由于集成了电机伺服控制和液压流体传动,系统具有很强的非线性[3]。电静压伺服系统是一个典型的高阶系统,为提升动静态特性,通常设计复杂的控制策略,也因此需要更为准确的系统模型。目前,国内外已有众多高校及科研院所进行电静压伺服技术相关研究工作,采用的系统模型大多基于理论设计参数和各种线性假设[4~6],模型仿真结果与系统实际测试结果的一致性不容易保证。为搭建契合实际系统特性的仿真模型,本文采用系统辨识方法辨识模型参数,在最小二乘辨识基础上引入遗传搜索对系统辨识结果进行优化。首先建立电静压伺服系统控制器、电机、液压作动器模型,再基于各模块输入输出量,采集试验数据,采用最小二乘法对模型参数进行辨识,再将辨识结果放入初始种群,利用遗传算法对辨识结果进行优化。分别在时域与频域内,对比模型仿真结果与系统实际测试结果,表明辨识结果实用、准确度高,可为高性能控制策略设计提供更精确的模型。
调查显示:宁夏图书馆A卡读者所占比例最大,用卡最为频繁,押金的性价比最高,基本能满足14岁及以上年龄的读者的阅读需求,且未满14周岁的读者也可由其父母使用A卡读者证外借少儿图书。
1 系统原理
电静压伺服系统通过控制伺服电机泵的转速和转向控制活塞杆的位移输出,原理如图1所示。控制器接收位置指令并和位移反馈信号进行比较和性能补偿,向驱动器发出转速指令信号,对电机泵的转速和转向进行控制,从而控制作动器的流量。增压油箱与单向阀构成补油系统,高压安全阀起保护作用,旁通阀用来满足作动筒零位调整的需要。样机设计参数如表1所示。

图1 电静压伺服系统原理
表1 样机设计参数
Tab.1 Setting Parameter of EHA Prototype
序号参数数值 1伺服电机泵工作电压/V270(DC) 2伺服电机泵最大转速/(r·min-1)18000 3伺服电机泵最高工作压力/MPa21 4最大速度/(mm·s-1)250
2 系统模型分析


图2 电静压伺服系统框图
2.1 电机模型
为简化电机模型结构,假定电机定子绕组三相对称,忽略转子阻尼,忽略磁路饱和磁滞涡流的影响,忽略气隙磁场的高次谐波分量,基于Clark变换和Park变换,可以得到电机在--同步旋转坐标系下的磁链方程:
电压方程:
考虑噪声的影响,则,

电磁转矩方程:


泵流量方程:
对式(1)~(4)进行拉氏变换,可得电机速度闭环模型框图,如图3所示。

图3 电机模型框图
(2)资产处置还是采取传统的线下处置流程,还未形成系统的线上信息化处置流程,科室人员需辗转多个部门签字完成申请,不利于资产处置工作效率的提高。

2.2 泵和作动器模型
为研究液压作动器自身特性,排除负载影响,此处采用空载数据,辨识摩擦等因素对作动器的影响。
液压作动器包括泵和作动筒,不考虑补油动态和油液温度变化影响,可得:

液压缸流量方程:

活塞缸受力平衡方程:

2.2.1 锡伯民族博物院。锡伯民族博物院位于察布查尔县孙扎齐乡境内,是国家4A级景区,博物馆以靖远寺为中心,距县城5 km,占地面积49 460 m2,是集锡伯民族历史文化展示、观光旅游、休闲度假等于一体的多功能综合旅游区。锡伯族悠久的历史文化和民族风情在这里形成独具风格的旅游特色,为游客呈现出“世界唯一,唯我独有”的魅力。
忽略复杂高频成分以及干扰因素的情况下,根据文献[7]和文献[8],电机转速闭环特性可以由典型Ⅱ型系统或2阶系统表征。考虑电气系统的控制延迟,加入延迟环节。电机模型表示为
对式(5)~(7)进行拉氏变换可得液压作动器模型框图,如图4所示。

图4 泵和作动器模型框图
因此,泵和作动器模型可表示为
初稿完成后,对照脚本用相关仪器再实际操作几次,记下每一步之后会出现什么样的界面和提示,再修改脚本,然后定稿。
其中,
泵和作动器的设计参数如表2所示。
表2 泵和作动器基本设计参数
Tab.2 Design Parameters of the Pump and Actuator
序号参数数值 1伺服电机泵排量Dp/(mL·r-1)3.18 2作动器活塞面积Ap/mm24396 3作动筒总容积Vt/m33.34×10-4 4油液弹性模量/Pa1.47×109
3 模型参数辨识方法
最小二乘法是参数辨识领域中最基本、应用最为广泛的方法[9],其基本形式如图5所示。

图5 SISI离散系统
差分方程形式为

然而,有人把这次来船厂和第三次来船厂混同一起,应是对《明英宗实录》卷四的误读。虽然《明实录》在阮尧民与刘清带兵松花江造船并捕海东青的记述一致,但宣德七年五月丙寅条,记述的是“军士未还者五百余人”,并最终由地方官吏从女真人那里基本索回。而宣德十年四月辛酉条,记述的是“骑卒死亡者八九百人”,起因是在与女真人贸易中杀伤其人,阮尧民带兵在归途上受到愤怒的女真人的一路攻击,造成“骑卒死亡者八九百人”。明显是互不相干的两件事,时间也相差三年。如果是宣德四年(1432)发生的“骑卒死亡者八九百人”,巫凯不可能三年后才发现并将此事上奏朝廷。
在本次研究中采用德国西门子公司S2000彩色多普勒超声仪,仪器的参数设定参照常规指标。在具体阶段,要求工作人员做好成像分析工作,颈前区的暴露对于分级处理有一定的影响,要求从上到下进行动态扫描处理,结合病灶组织和切面情况观察。
图7为4种辨识结果的时域响应曲线,4条仿真曲线与实际转速变化曲线较为接近,仿真曲线之间的差别主要在于最大转速段,其它阶段基本一致。


(2)察汗乌苏河地区1∶25 000地球化学测量圈定综合异常60个,显示异常元素种类多,元素组合明显,异常强度高,浓集中心明显,为后期找矿工作提供了较为详实的地球化学资料。
文献[9]对最小二乘辨识以及遗传算法辨识进行了仿真对比验证,表明遗传算法辨识能得到比最小二乘辨识更优的结果,因此,在最小二乘辨识结果的基础上,引入遗传搜索算法,以期对辨识结果进行优化。
遗传算法基本步骤如图6所示。

图6 遗传算法流程
确定待辨识参数并给出其约束条件以及适应度计算方法,而后对参数进行编码,产生初始种群,按照图6所示的步骤不断迭代,直至目标函数符合条件或迭代次数达到预定值遗传搜索结果具有一代优于一代的特性,可以对最小二乘法辨识结果进行优化。根据最小二乘辨识结果估计参数遗传搜索的范围,将最小二乘辨识获得的参数结果放入遗传搜索的初始种群,可保证遗传搜索的最终结果优于最小二乘辨识结果。
其中表示第t级回归后的特征点分布,Rt表示第t级回归器的更新量,I表示待检测人脸图像,h为HOG特征提取算子。算法的具体流程框图如下图6所示。
4 参数辨识与试验
对表达思想感情强烈的课文,教师应多花点精力,指导学生进行表情朗读,以读激情,引起共鸣。《再见了,亲人》一文的语言感情充沛,运用了比较多的祈使句、感叹句等句式,来表达赞美、感激、关切、崇敬等感情内容,字里行间洋溢着中朝人民的深情厚谊。教学时,为了让学生体会这种感情,我指导学生朗读重点句、重点片断,通过齐读、指名读、默读、轻声读等,从多次反复的朗读中激发他们的感情,从而体会到中朝人民的友谊确实是比山还高比海还深,是用鲜血凝成的。

4.1 电机模型参数辨识
转矩平衡方程:
表3 辨识结果目标函数值
Tab.3 Values of Cost Function for Identification Results
G(s)方法最终目标函数值 2阶最小二乘法3.8768×105 遗传算法3.5948×105 3阶最小二乘法4.1842×105 遗传算法3.5444×105
从目标函数值可以看出,在最小二乘辨识结果的基础上进行遗传搜索得到的参数,优于最小二乘估计结果。目标函数值的数值整体上较大,是因为在极限转速段,实际转速在一定范围内波动,与线性模型结果差异较大,这是由实际系统中电机的负载转矩变化等未建模因素的存在导致的。3阶模型遗传算法辨识结果与实测曲线在电机转速的上升段还是较为一致的,表明模型能较好地表征电机转速闭环动态特性。
(2)提高健身健美指导员的专业素质和服务意识。要及时对健身指导员进行培训进修学习新的训练方法和思想理念,还应要求教练与学员和会员间的交流,定期或不不定期开展活动,以便交流,提高欣赏的水平。[2]
基于国内学者的主要研究区域是全国范围内的,而山东省作为农业大省则具有代表性。故而本文不仅对农产品价格和CPI之间的传导机制进行理论关联性分析,还利用山东省2006年一季度至2017年三季度的CPI和API季度数据建立VAR模型进行实证研究,以期根据研究结论对稳定山东省农产品物价水平提出合理的建议。

图7 电机辨识结果时域特性
4.2 泵和作动器模型参数辨识
表4 泵和作动器模型辨识结果
Tab.4 Identification Results of the Pump and Actuator Model
方法目标函数值结果 最小二乘0.3902 遗传算法0.3526
图8给出了表4中的2种参数结果各自的时频域特性,并同时给出只保留积分环节情况下的时频域的仿真特性曲线。

a)时域响应实测与仿真结果对比

b)4种模型频率特性对比
续图8

4.3 整体位置闭环特性
学校始终坚持以提高教学质量为第一宗旨,以服务学生为第一要务。建校以来,学校高考升学人数逐年增加,升学率逐年提高。在学生艺体专业素质的挖掘和培养方面,接连取得较好成绩,学校在各级各类艺术竞赛中不断创造佳绩的基础上,每年向高校输送了一定数量的艺体特长生。


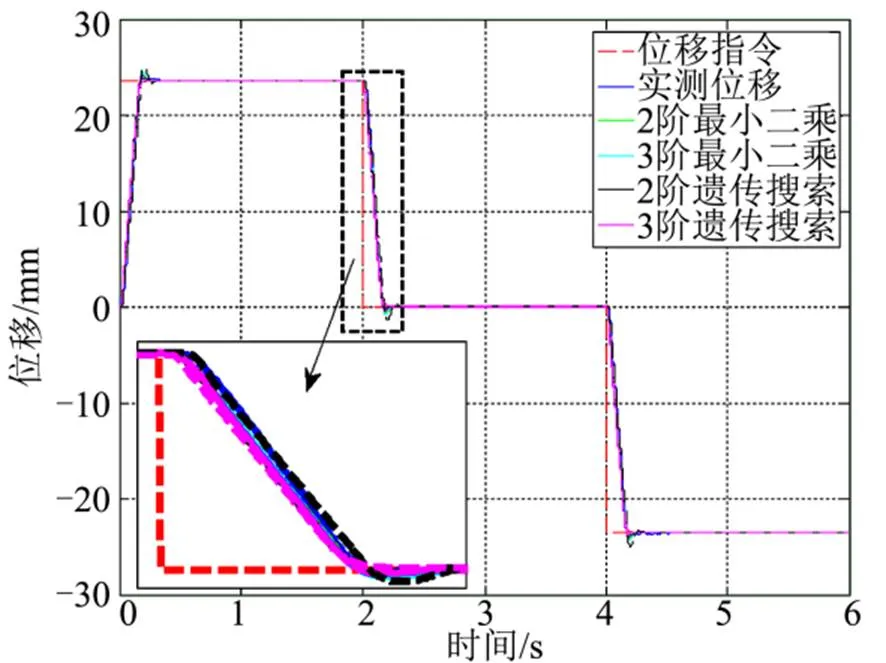
a)阶跃响应曲线

b)频率特性曲线
续图9
频域拟合误差具体结果如表5所示。
表5 频域特性拟合误差
Tab.5 Fitting Error of Frequency-domain Characteristic
方法最小二乘法遗传搜索 2阶3阶2阶3阶 幅频误差0.00370.01180.00480.0035 相频误差10.8%13.3%9..9%8.9% -3dB带宽差14.9%23.0%10.8%10.8%
图9a表明,采用不同的参数辨识方法得到的系统模型,其阶跃响应差别不大,且均与实际试验数据一致度较高。从图9b及表5可以看出,频域上,3阶遗传搜索仿真结果最为接近系统实测结果。综上所述,在最小二乘辨识结果上进行遗传搜索获得的参数结果确实优于最小二乘辨识结果,最终结果对实际系统的拟合误差基本在10%,工程应用中可以接受。
5 结 论
本文通过线性化分析确定电静压伺服系统模型结构,提出在最小二乘辨识基础上使用遗传算法优化辨识结果的辨识方法,对电静压伺服系统模型参数进行辨识。时频域内模型仿真与试验数据的比较结果表明,该方法得到的系统模型能准确地表征实际系统特性,为控制策略设计提供支撑。
[1] 付永领, 等. 电动静液作动器设计方法综述[J]. 北京航空航天大学学报, 2017, 43(10): 1939-1952.
Fu Yongling, et al. Review on design method of electro-hydrostatic actuator[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(10): 1939-1952.
[2] Nicolas L. AIRBUS research and perspectives for aircraft control actuation[C]. Toulouse: 8th International Conference on Recent Advances in Aerospace Actuation Systems and Components, 2018.
[3] Yang L. Controller design for hydraulic position control systems[D]. Saskatoon: University of Saskatchewan, 2011.
[4] 习仁国, 刘卫国, 陈焕明. 电静液作动器的建模仿真与试验研究[J]. 机床与液压, 2013, 41(19): 40-44.
Xi Renguo, Liu Weiguo, Chen Huanming. Modeling simulation and experimental research on Electro-Hydrostatic Actuator(EHA)[J]. Machine Tool & Hydraulics, 2013, 41(19): 40-44.
[5] 杨钟鼎, 等. 变速积分PID法控制的电静液作动器的设计与仿真[J]. 江苏科技大学学报(自然科学版), 2017, 31(3): 321-326.
Yang Zhongding, et al. Design and simulation variable speed integral PID control method of electro hydrostatic actuator[J]. Journal of Jiangsu University of Science and Technology(Natural Science Edition), 2017, 31(3): 321-326.
[6] Pachter M, Houpis C, Kang K. Modeling and control of an electro-hydrostatic actuator[J]. International Journal of Robust and Nonlinear Control, 1997, 7(6): 591-608.
[7] 张玉强. 大功率电静压伺服机构动态特性研究[D]. 北京: 中国航天科技集团公司, 2016.
Zhang Yuqiang. Dynamic characters of high power electro hydrostatic actuator[D]. Beijing: CASC, 2016.
[8] 陈伯时. 电力拖动自动控制系统——运动控制系统(第3版)[M]. 北京:机械工业出版社, 2003.
Chen Boshi. Automatic control of electrical drives: actuation control system 3rded[M]. Beijing: China Mechine Press, 2003.
[9] 刘金琨. 系统辨识理论及Matlab仿真[M]. 北京: 电子工业出版社, 2013.
Liu Jinkun. System identification theory and Matlab simulatioin[M]. Beijing: Publishing House of Electronics Industry, 2013.
Model Parameter Identification of an Electro-Hydrostatic Actuator Base on Genetic Algorithm
Zhang Chun-long, Zhao Ying-xin, Zhang Peng, Hao Wei-yi, Feng Wei
(Beijing Institute of Precision Mechatronics and Controls, Beijing, 100076)
An Electro-Hydrostatic Actuator (EHA) model, including a controller, a motor and a hydraulic actuator is constructed. The inputs and outputs of each block are recorded when testing the EHA prototype, based on which the model parameters are identified. The Least Square Identification is performed at first, whose parameters identification result is introduced into the initial group of a Genetic Algorithm Identification to get optimized. It is shown that this method is practicable, for the model with parameters from the optimized identification result matched the real system better, with over 90% similarity, both in time domain and frequency domain.
electro-hydrostatic actuators; genetic algorithm; least square identification; parameter identification
TP391
A
1004-7182(2020)01-0072-06
10.7654/j.issn.1004-7182.20200113
2019-10-24;
2019-11-01
张春龙(1995-),男,硕士研究生,主要研究方向为流体控制及自动化。
赵迎鑫(1974-),男,研究员,主要研究方向为电液伺服系统研究和设计。
5)给排水控制系统运行中通过对PLC实际作用的充分发挥,可实现水位信号的自动检测,从而得到准确性良好的供水井涌水量判断分析结果,进而实现对水泵运行中的有效调度[2]。
张 朋(1984-),男,工程师,主要研究方向为电液伺服系统研究和设计。
郝伟一(1989-),男,工程师,主要研究方向为电液伺服系统研究和设计。
冯 伟(1992-),男,工程师,主要研究方向为电液伺服系统研究和设计。