基于DoDAF的无人机协同作战效能评估
2020-03-26史翔宇
王 瑛, 史翔宇, 李 超
(空军工程大学装备管理与无人机工程学院, 西安, 710051)
无人机协同作战是指多架无人机将各自的作战资源和空间占位整合,协同完成作战任务,是未来战场上作战模式主要发展趋势之一[1]。在执行作战使命之前,需要对实施方案进行整体效能评估[2-3],给决策者在方案选取方面提供数据支撑,有效提高协同作战任务执行的成功率[4]。
DoDAF(Department of Defense Architectural Framework,DoDAF)是用于体系结构开发的顶层框架模型,研究体系结构的框架模型和顶层概念,可为决策者制定方案提供支撑,适用于体系结构的构建与分析[5]。李大喜[6]使用DoDAF视图产品建立空基反导装备体系结构可执行模型;高松[7]使用DoDAF针对岛礁防空反导作战构建了岛礁防空反导电子对抗装备体系顶层概念框架。DoDAF在体系结构描述、作战活动分析等方面是一种有效的工具。
ADC(Availability Dependability Capability,ADC)模型考虑问题全面、数学模型严谨,是目前对武器系统实施效能评估有效的评估方法[8]。包悦[9]借鉴Markov过程将ADC模型简化,实现了对反导导弹战斗部作战的效能评估;陈强[10]综合幂指数法与层次分析法处理能力矩阵,再使用ADC模型实施数据链系统作战效能评估。ADC模型对装备体系的可用度、可信度、能力综合分析,适合对复杂系统进行效能评估[11]。
本文以无人机协同作战为研究对象,采用DoDAF开展对无人机协同作战结构的分析,得到无人机协同作战的效能评估能力指标体系,通过ADC模型对无人机协同作战进行效能评估。最后以典型对地作战任务进行实例分析,验证了效能评估方法的可行性和合理性。
1 无人机协同作战指标体系构建方法
在当今复杂的国际局势下,提高无人机协同作战能力有利于我国实施积极防御的军事战略。本文基于DoDAF分析无人机协同作战军事需求,并构建无人机协同作战体系。
1.1 基于DoDAF的建模过程
1)作战任务描述。DoDAF将使命任务转化为高级作战概念图(OV-1),让建模人员对作战使命有一个直观、具体化的了解。
2)作战活动描述。将作战使命分解为包含时序关系的若干子任务,梳理任务与子任务的层层聚合关系。DoDAF中的作战活动分解视图(OV-5a)可以有效满足这些需求。
3)作战能力描述。为了得到无人机协同作战的指标体系,需要建立作战任务和作战活动之间的映射关系,然后对能力进行分解,得到子能力和相应的能力指标需求,主要涉及DoDAF中作战活动到系统功能追踪矩阵(SV-5a)和能力列表(CV-2)。
通过作战任务—作战活动—作战能力的逻辑关系,可以从文字描述的使命任务中分析获得效能评估体系结构及相关的能力指标需求,见图1。
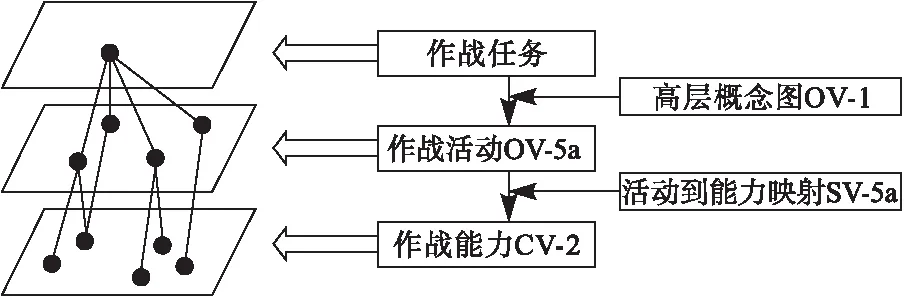
图1 DoDAF建模过程
1.2 无人机协同作战指标体系构建
1.2.1 作战想定
若干架无人机在起飞后进入目标区域开始侦查,期间可能受到空空威胁、地空威胁以及电子干扰。无人机探测到作战目标后实施武力打击,对目标进行毁伤评估后,判断目标状态后,再选择实施第二轮武力打击或者返航。
1.2.2 构建协同作战指标体系
1)对军事需求进行分析,得到作战使命,构建高级概念图。无人机协同作战的高层作战概念图刻画出作战过程,见图2。
2)对无人机协同作战高级作战概念图中各个活动进行分解,生成活动分解视图见图3。图中包含16项作战活动,具体见表1。
3)分析各项活动所涉及的作战能力,得到无人机协同作战活动到能力追踪矩阵,见表2所示。通过作战活动到能力追踪矩阵,可以清晰直观地表现出作战活动与协同作战能的映射关系。
将所需要的能力进一步分析,得到无人机协同作战效能指标体系,如图4所示。
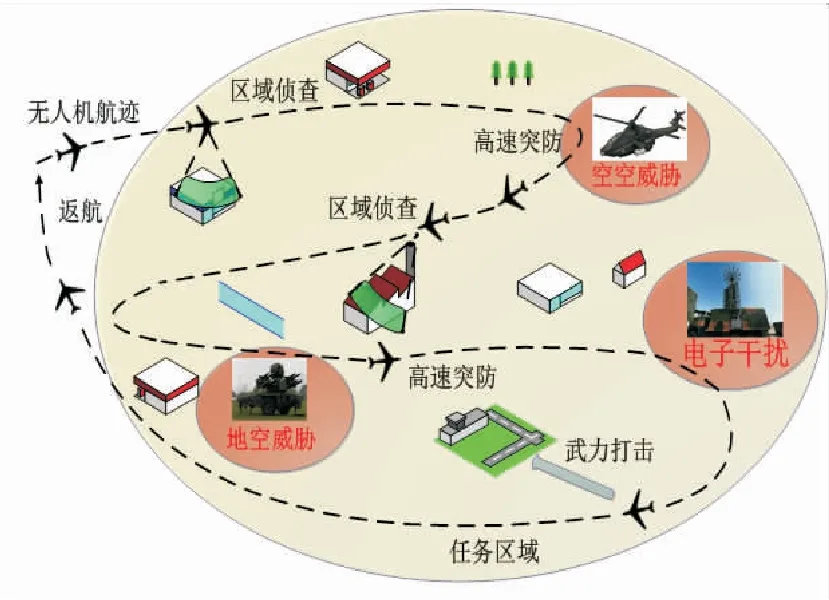
图2 高级作战概念图(OV-1)
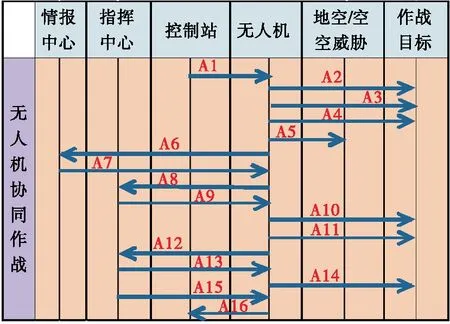
图3 作战活动分解视图(OV-5a)
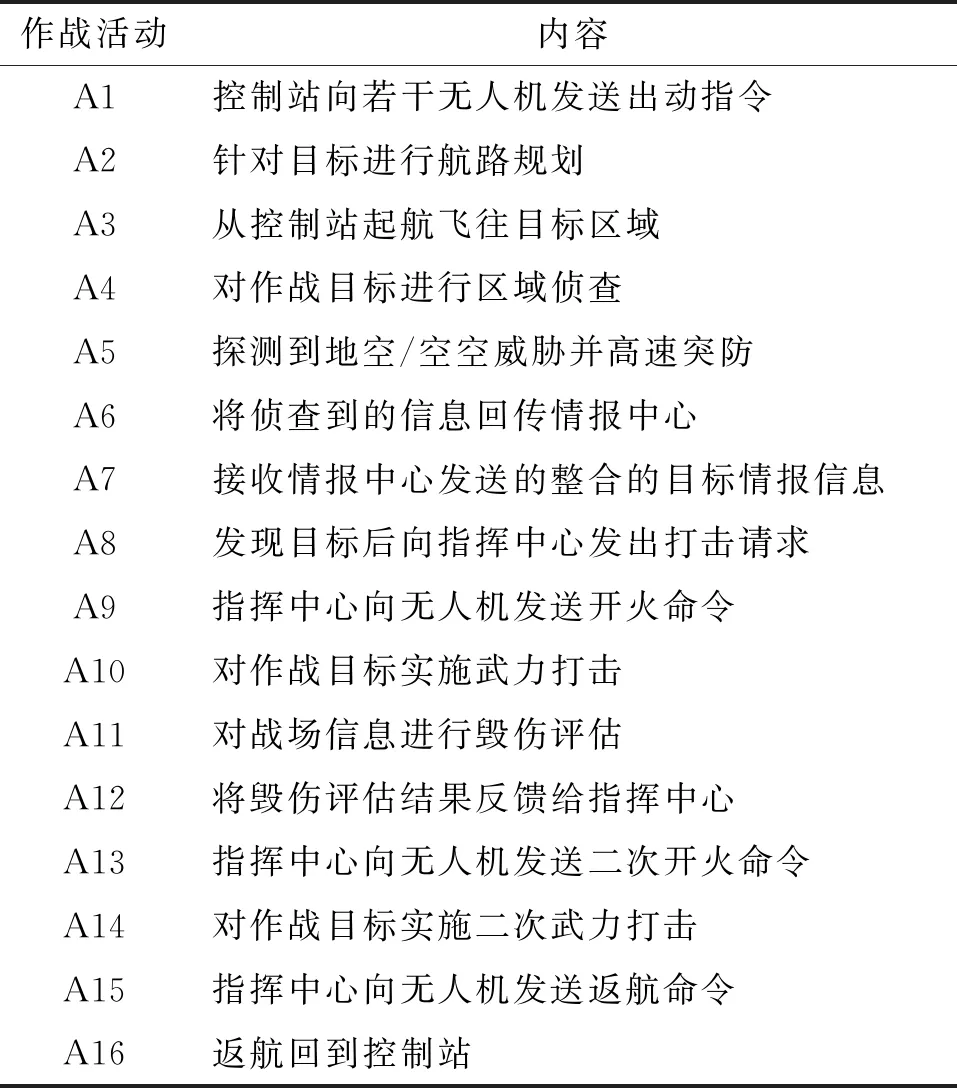
表1 作战活动表
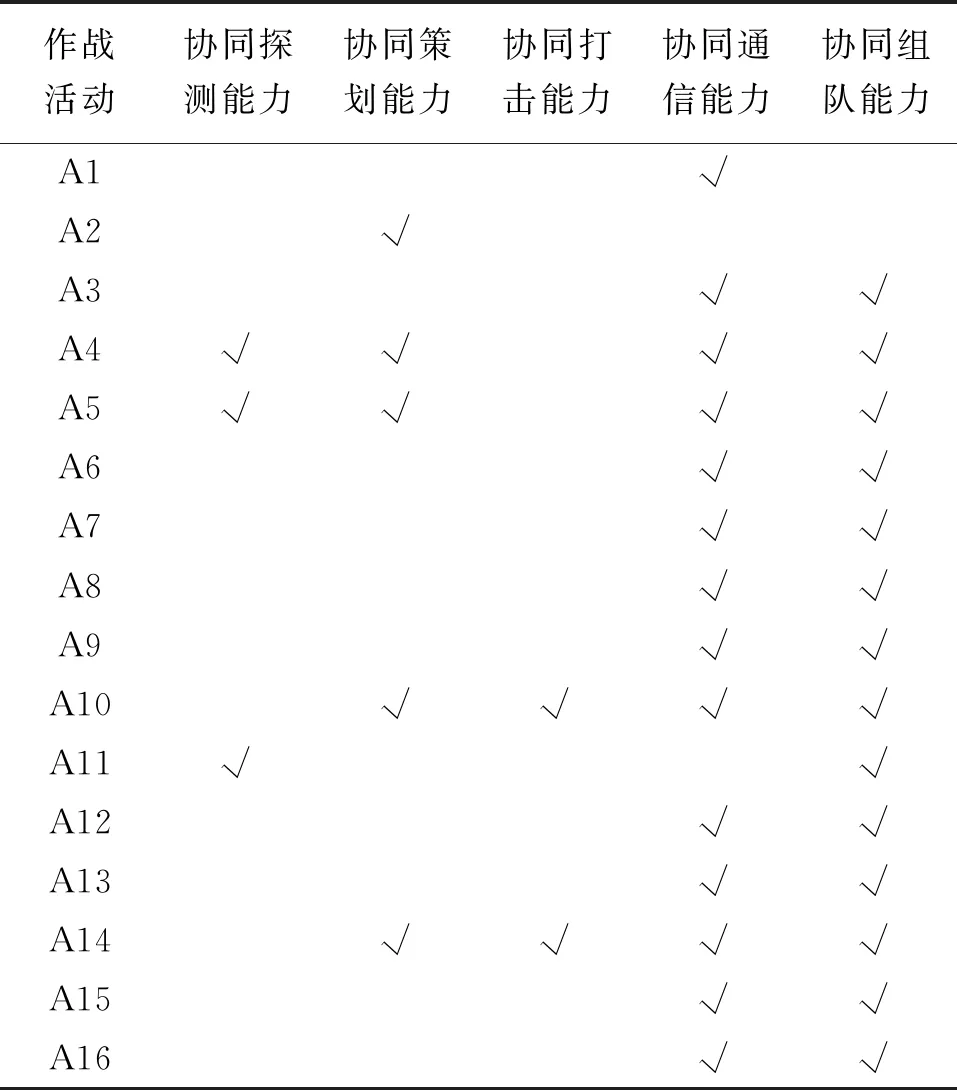
表2 作战活动到能力追踪矩阵(SV-5a)
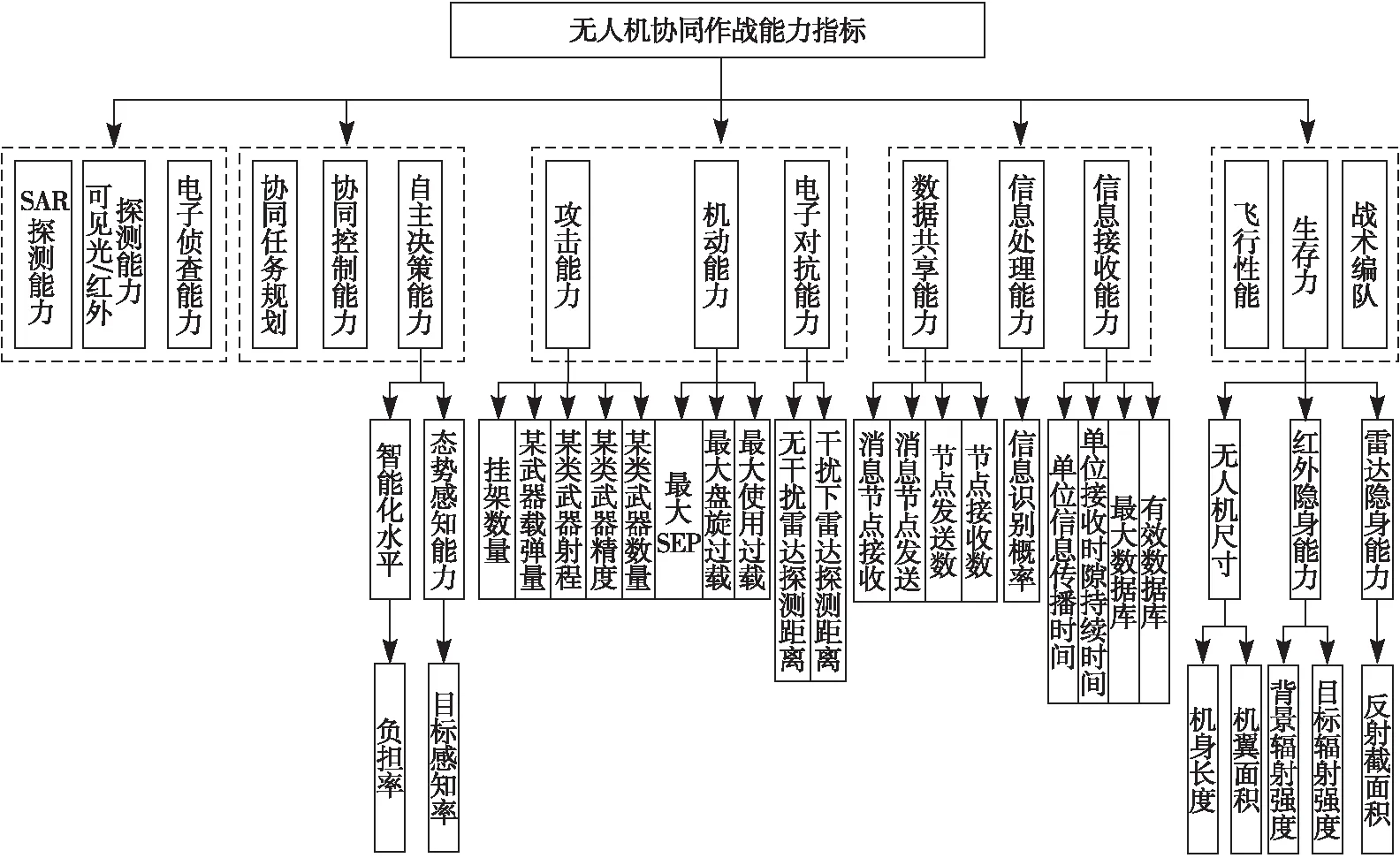
图4 无人机协同作战效能指标体系
2 基于ADC的协同作战效能评估方法
2.1 基于ADC的协同作战效能评估
无人机协同作战涉及的效能评估指标主要分为量纲型指标和概率型指标。使用效用函数法对量纲型指标进行处理,概率型指标分为定量和定性2类,使用概率法处理定量指标,使用标度法处理定性目标。再将它们聚合生成能力向量C;对于可靠性指标,使用比例计算法生成可用性向量A,再使用指数法处理指标得到可信度矩阵D,见图5。
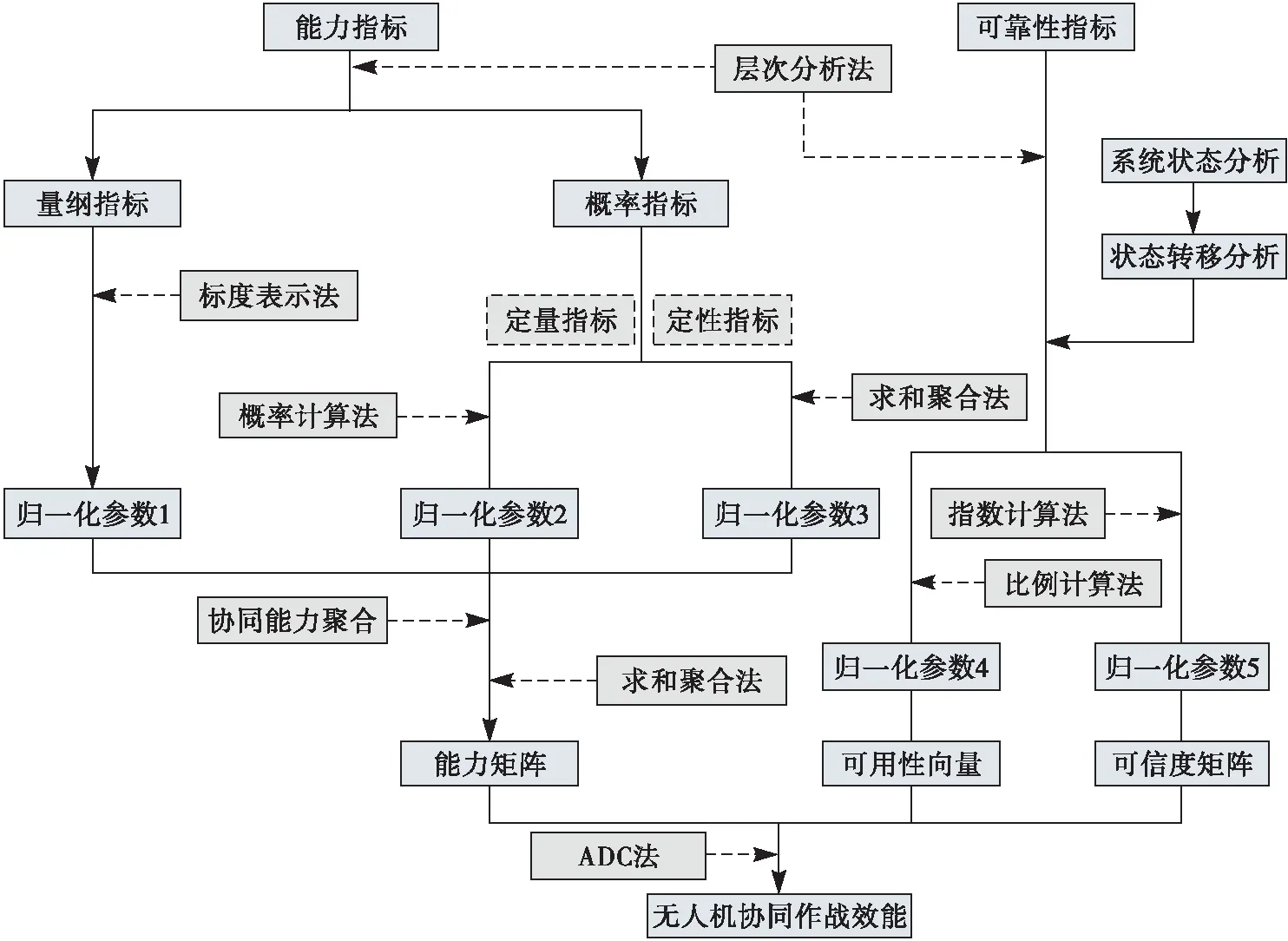
图5 无人机协同作战效能模型的建立步骤与方法
2.1.1 可用性模型的建立
A表示开始执行作战活动时无人机协同编队可能处于的状态,是对作战任务开始时系统状态的描述。假设某次任务出动n架A型无人机,m架B型无人机,由于作战环境、侦查范围、作战目标个数及防御能力以及无人机最大航行时间等的影响,至少保持k架无人机处于正常状态才能执行任务。
同种类型的无人机可用度相同,平均故障间隔时间为MTBF,平均修复时间为MTTR,可用度asi[12]为:
(1)
式中:i=1,2,…,n表示无人机的种类。
则系统状态计算步骤如下:
步骤1记无人机故障数为j(j=0,1,…,n+m),A型无人机故障数为l,初始j=0,l=0,计算有j架无人机故障时系统的状态;
步骤2N=n-l,M=m-(j-l)分别表示正常状态的无人机数量;
步骤3判断N≥0,M≥0,判断此种状态中处于正常状态的无人机数量是否为正。若是,则这是系统的一种状态,计算系统处于此种状态的概率;若否,则这种情况不是系统的状态,执行步骤4;
步骤4假设A型无人机故障数为l=l+1,判断此时l是否大于总故障数j。若否,转到步骤2,计算系统可能处于的状态;若是,则系统故障数为j的情况已经筛选完毕,执行步骤5;
步骤5假设系统总故障数为j=j+1,判断j是否大于系统允许的总故障数n+m-k。若是,则转到步骤2,计算此时系统可能处于的状态;若否,则系统可能处于的状态判断完毕;
步骤6输出A。
计算流程见图6。

图6 可用性向量A的计算步骤
2.1.2 可信度模型的建立
可信度矩阵D表示无人机协同作战系统状态改变的概率,假设系统的状态有n个,每种状态可以相互转移,D可表示为:
(2)
dij表示从状态Si转移到Sj的概率,若系统是不可修复的,则:
(3)
假设无人机在执行任务过程中出现故障不可修复,t时刻无人机可靠度Ri(t)[12]为:
Ri(t)=e-λit
λi=1/MTBFi
(4)
式中:i=1,2,…,n表示无人机的种类。
对地攻击型无人机生存力Sur主要影响因素包括[13]:雷达反射截面积(RCS)、电子对抗能力以及无人机的几何尺寸:
(5)
式中:εe为电子对抗能力系数;RCS(m2)指无人攻击机迎头方向雷达反射截面积的均值;In表示红外隐身能力;ACL指无人机自主化等级;DL为无人机数据链能力;Mane为无人机机动能力;S为机翼面积,单位为m2;Lall为无人攻击机的长度,单位为m。
无人机的可用率Ui为:
Ui(t)=Ri(t)Suri
(6)
假设系统的第1种状态为所有无人机正常,第2种状态为n-1架A型无人机正常,m架B型无人机正常,则t时刻系统由状态1转化为状态2的概率d12(t)为:
(7)
其余状态转移概率dij均可如此计算,可得:
D=(dij)n×m,i>j时dij=0
(8)
2.1.3 能力模型的建立
无人机协同作战能力向量为:
C=[c1c2…ci…cn]T
(9)
式中:ci表示系统处于状态i时完成任务的概率。
从2.1节可知,对于量纲类能力指标,如攻击能力、有效系统容量等,使用尺度标度法进行处理。尺度标度法使用灵活,对单系统或方案评价时有很好的效果。首先,设计一个标尺,如优(0.8~1.0),良(0.65~0.8),中(0.55~0.65),差(0.3~0.55),然后使用专家评价法对性能指标打分,最终得到量化均值cli(i=1,2,…,n)。
对于定量型概率类能力指标,使用概率计算法进行处理。如无人机机动能力EJD,是无人机执行对地攻击任务的重要组成部分,影响无人机机动能力的因素主有最大使用过载nymax、最大盘旋过载nycir以及最大单位剩余功率sep[13]:
(10)
对于定性型概率类指标,使用求和聚合法进行处理。如无人机自主决策能力Ctr,无人机自身传感器将周围态势感知的情况传给无人机计算机,并根据无人机的智能化系统做出行动指令。态势感知能力Ts和智能化水平Zn是影响自主决策能力的关键指标,确定相应的权重ω1,ω2,计算公式如下:
Ctr=ω1Ts+ω2Zn
(11)
对于归一量化后的各项能力指标,使用求和聚合法先求出系统的各项协同能力,再整合得到系统处于状态i时的综合能力ci,分析系统处于不同状态下的综合能力,即可得到无人机协同作战能力向量C。
3 实例分析
假设此次任务共出动A、B 2种察打一体无人机共4架,且任务执行过程中至少保持3架无人机处于正常状态,任务持续时间1 h,且任务执行过程中无人机故障不可修复,则有如下方案:①1架A类无人机,3架B类无人机;②2架A类无人机,2架B类无人机;③3架A类无人机,1架B类无人机;④4架A类无人机;⑤4架B类无人机。
A、B无人机的性能指标见表3,下面计算方案①的作战效能。

表3 无人机性能指标
3.1 可用性向量A的计算
执行任务的4架无人机属于并联关系,要保证至少3架无人机处于正常,系统有4种状态,如表4所示。
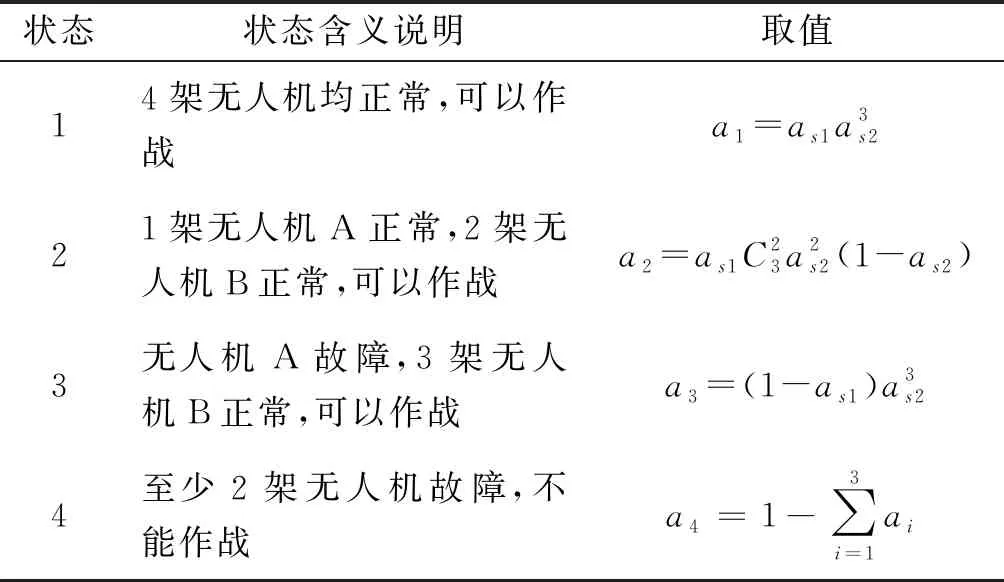
表4 无人机协同作战系统状态表
由表3中A、B型无人机的MTBF与MTTR可计算as1,as2,使用2.1.1节流程步骤中的计算A,可得:
A=[0.929, 0.056, 0.013, 0.002]
(12)
3.2 可信度矩阵D的计算
(13)
式中:U1,U2分别为无人机A与无人机B的可用率;
(14)
由公式(11)与公式(12)得:
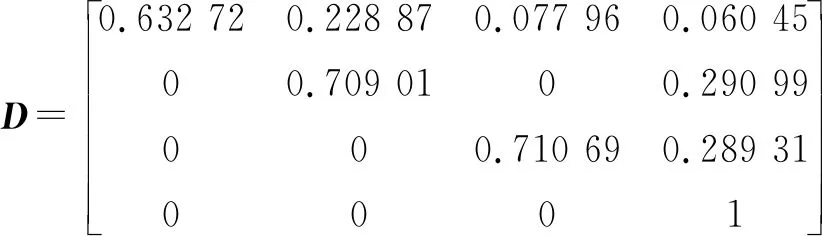
(15)
3.3 能力向量C计算
为简化计算过程,在案例中对能力向量的计算只考虑能力的有无。
1)计算量纲类性能指标
使用尺度标度法,计算SAR雷达探测能力、可见光/红外探测能力、电子侦查能力、攻击能力所对应的量化值Cli(i=1,2,3,4),计算结果见表5。
2)计算概率性指标
使用2.1.3中的计算模型,确定信息接收能力、信息处理能力、信息共享能力、协同任务规划、协同控制能力、自主决策能力、协同机动能力、电子对抗能力、飞行性能、战术编队、生存力Cgi(i=1,2,…,11),如表6所示。
3)计算系统能力向量
由专家调查法确定各项能力指标的权重见表7。
计算无人机协同作战的能力,得:
C=[c1c2c3c4]T=[0.7960.7830.7210]T
(16)
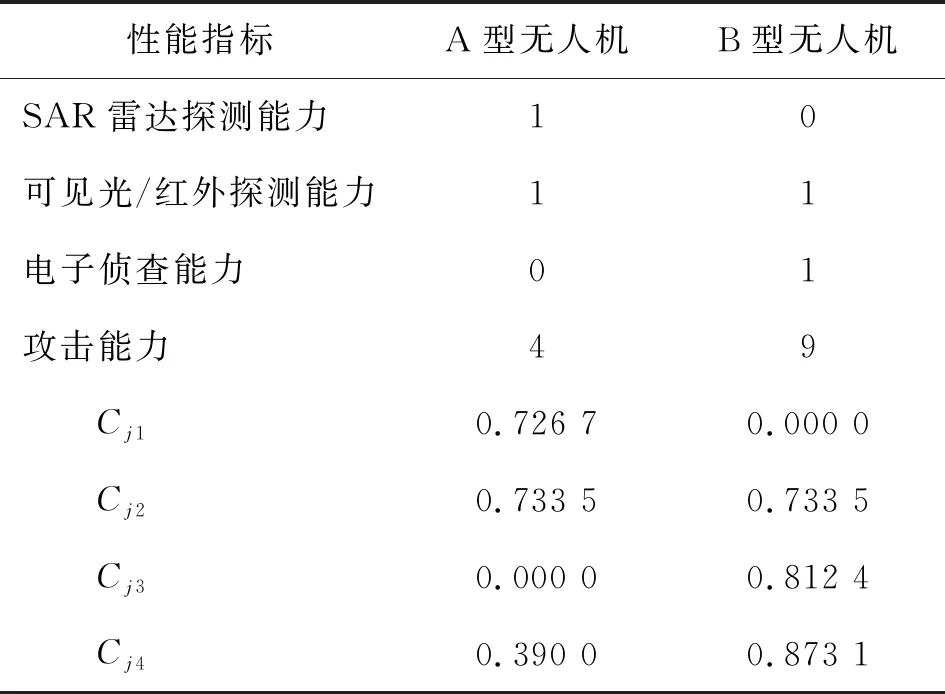
表5 无人机协同作战量纲指标的计算
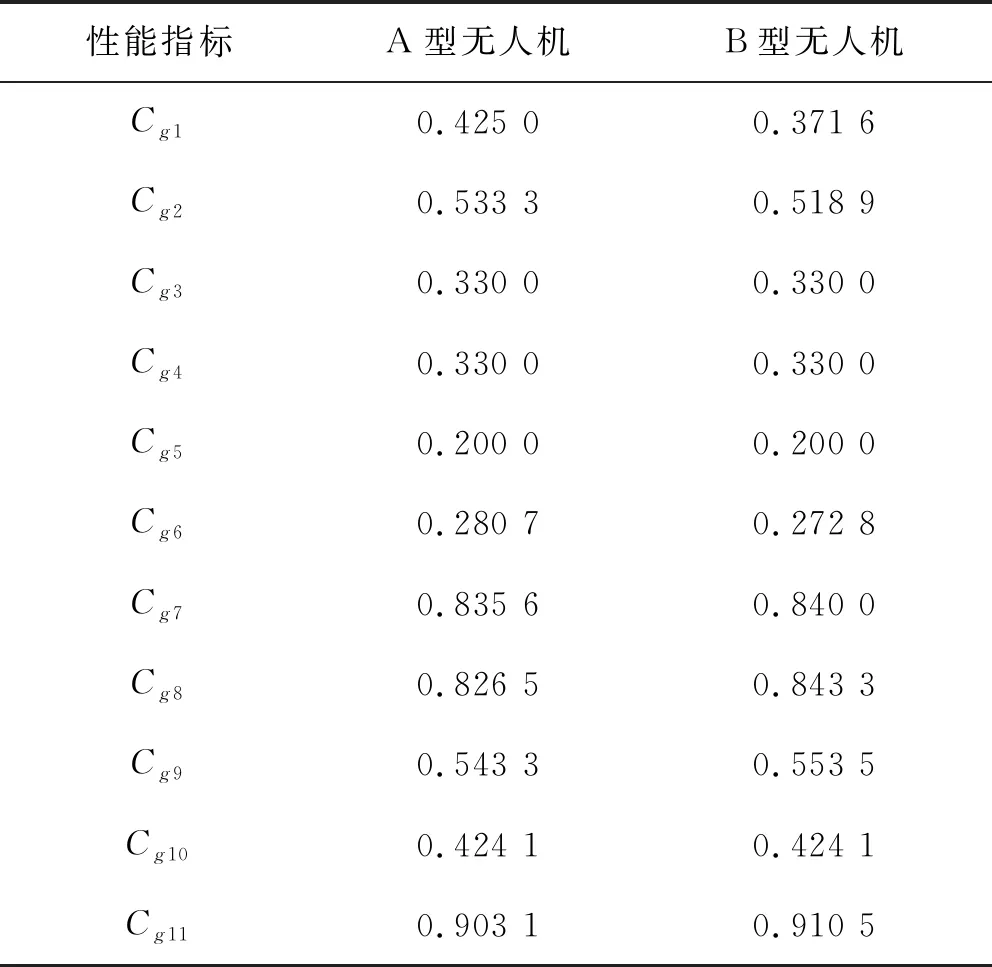
表6 无人机协同作战概率指标的计算
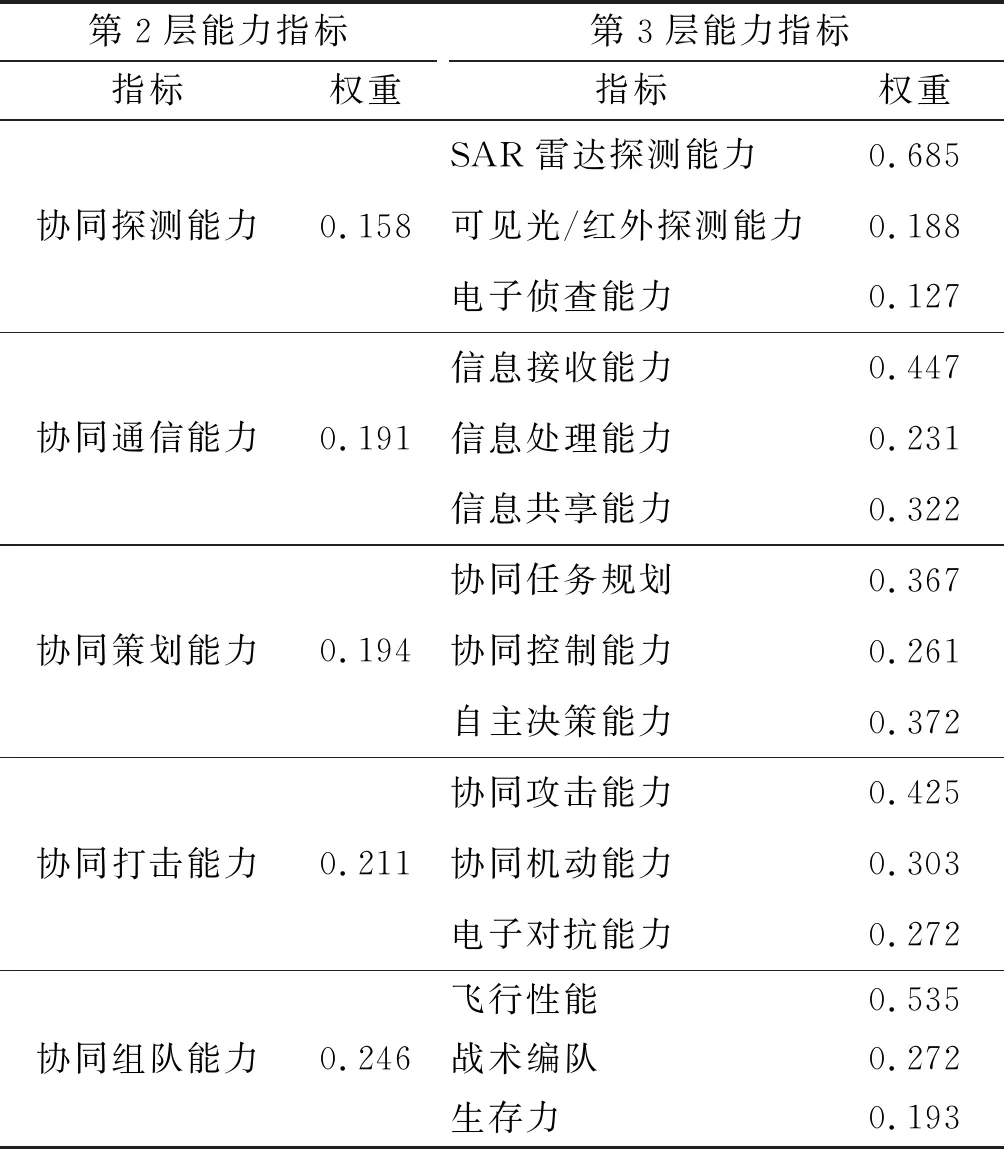
表7 无人机协同作战能力指标权重
3.4 可用性向量的计算
执结合前面的计算结果,可得在给定任务下第一种方案的无人机协同作战效能为:

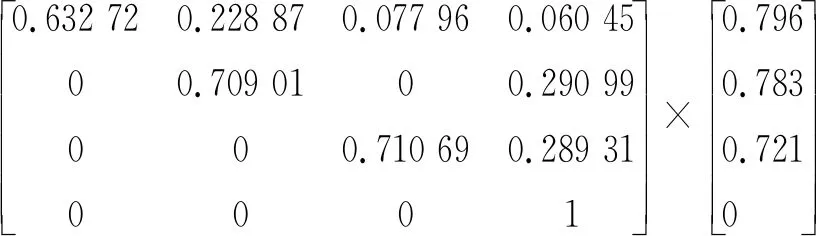
(17)
同理可计算出其他4种方案的作战效能,计算结果如表8所示。

表8 多种无人机协同作战配置方案下的效能值
由表8分析可得,方案4与方案5效能较低,它们只选用了一种类型的无人机。2种无人机能力各有侧重,A型无人机侦查能力比B型无人机强,但是在作战能力方面相对较弱。因此,这2种方案整体上分别在作战和侦查方面有所不足,所计算出的无人机协同作战效能偏低。方案1~3均选用了不同类型的无人机,整体效能有所提高,其中方案1效能最高。这表明在此次任务中,选择1架A型无人机和3架B型无人机可以获得最高的作战效能。本文所提出的效能评估方法,可以在数据层面为决策者提供最合适的方案,在无人机协同作战方面有重要的应用参考价值。
4 结论
针对无人机协同作战效能评估问题,本文基于DoDAF体系结构模型对无人机协同作战进行建模分析,根据作战任务构建视图,得到无人机协同作战指标体系,并使用ADC模型对无人机协同作战进行效能评估。结合案例分析,对察打一体无人机对地作战任务下不同方案进行效能评估,仿真分析结果证明了本文提出的无人机协同作战效能评估方法的有效性。
