一种长基线中野值点判定、剔除及修正方法
2020-03-23李钉云冯海泓
李钉云,冯海泓
(1. 中国科学院声学研究所东海研究站,上海201815;2. 中国科学院大学,北京100049)
0 引 言
随着海洋技术的日益发展,各种水下作业和科考设备得以广泛使用,因此对水下声学定位[1]的需求日益增加。其中,常用的水下声学定位系统有长基线(Long Base Line, LBL)[2-3]、短基线(Short Base Line, SBL)和超短基线(Ultra Short Base Line,USBL)定位系统。长基线定位系统由于其定位精度高、覆盖范围广等优点被广泛用于水下定位中。在使用长基线定位系统定位的过程中,由于受到各种环境因素的影响,求解时不免出现一些偏差较大的点,俗称野值点[4]。野值点的出现不仅会降低定位精度,而且会使得目标在该点的位置和速度等运动状态信息无法被准确获取,因此需要对野值点进行实时的判定、剔除和修正。常用的门限检测方法[5]仅能对长基线系统定位轨迹中的大部分野值点进行剔除,而不能对其进行修正。残差检测法可对野值点进行剔除和修正,但是当滤波模型与实际运动不匹配时,效果较差。
为此,本文在残差检测法的基础上提出了改进残差检测法,以卡尔曼滤波的残差绝对值作为野值点的判定标准,对其进行判定和剔除,以调整后的卡尔曼滤波估计作为野值点的修正值。针对滤波模型与实际运动不匹配时,正常点滤波后偏离原始位置这一问题,选择对正常点不做处理来减小后置处理引入的误差。
1 门限检测法
门限检测法是长基线系统定位中野值点判定和剔除的常用方法。设长基线系统中待定位目标运动的最大速度为vm,定位周期为T,则检测的门限值H 为

设长基线系统定位中的轨迹点坐标为( xk, yk), k=1 ,2,3…,则初始点坐标为( x1, y1),它到第k (k >1 )个点之间的距离Dk为

由运动的基本规律可知,目标在一个周期内的运动位移应小于或者等于其最大速度与定位周期的乘积。根据以上规律,可得门限检测法的基本步骤为:
(1) 选一个正常点作为初始点( x1, y1);
(2) 判断前两个点之间的距离D2,若是D2< H,则该点为正常点,将其作为初始点,回到步骤(1)。反之,该点为野值点,并继续判断初始点和第k (k > 2)个点之间的距离,直至 Dk<kH,则当前的点为正常点,在此之前的k− 2个点均为野值点,将该点作为初始点,回到步骤(1),直到结束。
2 残差检测法
在长基线定位系统的数据处理过程中,可以利用卡尔曼滤波[6]的残差作为评判标准,对野值点进行判定和剔除,用卡尔曼滤波估计对野值点进行修正,并对正常点进行卡尔曼滤波。这样的处理可以剔除和修正野值点,使得定位轨迹更加平滑,本文将这样的处理方法命名为残差检测法。
卡尔曼滤波是利用线性系统状态方程,通过输入和输出的观测数据,对系统状态进行最优估计的算法。离散卡尔曼滤波[7]通常由如下状态方程和测量方程构成:

卡尔曼滤波将预报估计的方差作为评定数据好坏的指标,并根据预报估计的方差来确定卡尔曼滤波增益,之后通过卡尔曼滤波增益将权值分配给理论计算值和实际测量值,从而得出最优的估计。根据上述卡尔曼滤波的基本思想可得其基本滤波处理的步骤为
(1) 预报估计

(2) 预报误差协方差矩阵

(3) 滤波最佳增益
总而言之,中华传统文化博大而精深。我们可以通过种种方式,让学生接触更多丰富的传统文化,反过来滋养自己的写作内涵,达到传承中华传统文化的效果。

(4) 滤波估计(状态估计)

(5) 滤波估计的均方误差

使用卡尔曼滤波时,首先需要对待滤波的数据进行预报估计,当滤波模型与实际运动相匹配时,预报估计值与实际测量值偏差较小。因此可以使用残差的绝对值为参考,给出野值点的残差阈值δ ,当残差绝对值大于阈值时,判定该点为野值点,并使用卡尔曼滤波的预报估计值Φk,k−1对野值点进行修正[8-9];反之,该点为正常点,可对其进行卡尔曼滤波,即在滤波处理的过程中将式(8)改为

使用残差检测法时,将卡尔曼滤波步骤中的式(8)改为式(10)即可。
3 改进残差检测法
卡尔曼滤波要求滤波模型与实际运动相匹配时,才会有较好的滤波效果;反之,不仅影响滤波效果,而且会使得滤波结果发散。长基线系统定位中常用的卡尔曼滤波模型为匀加速直线运动模型,但是水下目标不一定时刻在做匀加速直线运动。滤波模型与实际运动不匹配时,卡尔曼滤波的残差绝对值将会增大,此时应该适当调整残差阈值δ 。此外,卡尔曼滤波的预报估计值Φk,k−1与实际值也会有一定偏差,因此将预报估计值调整为αΦk,k−1,使得调整后的预报估计值更加接近于野值点偏离前的真实位置,从而更准确地对其进行修正。由于滤波模型与实际运动不相匹配,部分正常点在进行滤波后会与原始轨迹有偏离,此时对正常的点不做处理,保留其原始值,即将式(10)改为


由式(12)计算出残差阈值δ 后,将式(10)改为式(11)后,再按照卡尔曼滤波的步骤进行处理的方法即为改进残差检测法。
4 实验结果分析
湖上实验中,使用长基线系统对水下无人潜水器(Unmanned Underwater Vehicle, UUV)进行定位,其中长基线系统定位节点数量为3 个,定位工作周期为10 s,定位坐标系为东-北-天坐标系,UUV 自身通过惯性导航技术进行导航,其某一航次长基线系统的定位轨迹及惯性导航轨迹如图1 所示,局部轨迹如图2 所示。
在短时间内惯性导航系统的器件漂移误差较小,所以认为UUV 的惯性导航轨迹是准确的,并将其作为长基线系统定位轨迹中野值点判定的参考。从图1 和图2 中可以看出,长基线系统定位轨迹中存在4 个野值点。对该轨迹分别使用门限检测法、残差检测法和改进残差检测法进行处理,三种方法处理后的轨迹与UUV 的惯性导航轨迹对比图如图3、图4 和图5 所示。
对比图2 和图3 可以看出,使用门限检测法处理后,长基线系统定位轨迹中的4 个野值点被剔除了3 个,剩余1 个未被剔除。门限检测法对于野值点的剔除具有一定效果,但是该方法不能对剔除后的野值点进行修正。如果需要对野值点进行修正,则需对剔除野值点后的数据进行插值操作。这样不仅增加了处理步骤,也增加了处理时间,使得该方法的实时性较差。
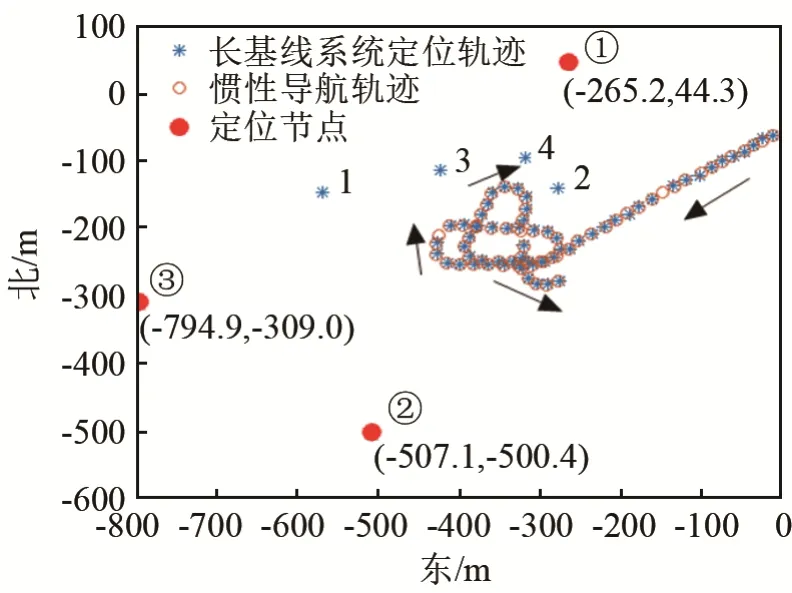
图1 水下无人潜水器的运动轨迹Fig.1 The moving trajectory of UUV

图2 局部的水下无人潜水器运动轨迹图Fig.2 A part of UUV moving trajectory
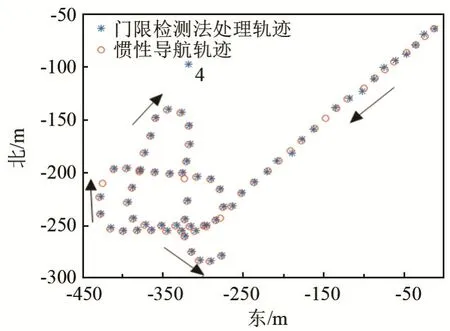
图3 门限检测法处理轨迹Fig.3 Trajectory processed by threshold detection method
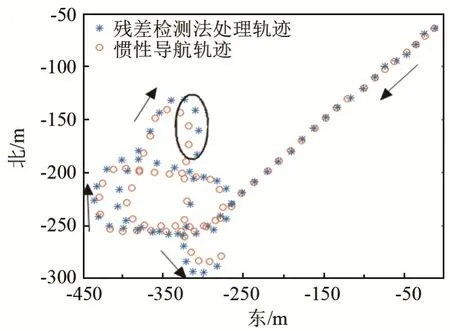
图4 残差检测法处理轨迹Fig.4 Trajectory processed by residual error detection method

图5 改进残差检测法处理轨迹Fig.5 Trajectory processed by the improved residual error detection method
对比图2 和图4 可以看出,使用残差检测法处理后,长基线系统定位轨迹中的野值点已被剔除和修正,但是局部区域在处理后引入了偏差。原因在于滤波模型与该处运动不匹配,虽然滤波处理后的几何形状是相似的,但是局部区域却出现了偏差。残差检测法可以对野值点进行剔除和修正,但是当滤波模型与实际运动不匹配时,其效果较差。
对比图2 和图5 可以看出,改进残差检测法可以对野值点进行剔除和修正,且处理后的轨迹更加符合UUV 的实际运动轨迹,具有较好的效果。
以UUV 的惯性导航轨迹为参考,计算长基线系统定位轨迹的误差均方根值,剔除野值点前为55.68 m,使用残差检测法处理后为8.11 m,使用改进残差检测法处理后为2.04 m。由于门限检测法效果较差,因此不对其做进一步的误差分析。显然,改进残差检测法对长基线系统定位轨迹中的野值点具有较好的剔除和修正效果,且减小了长基线系统的定位误差。
5 结 论
本文介绍了长基线系统定位轨迹中野值点处理的门限检测法和残差检测法,提出了改进残差检测法用于对野值点的判定、剔除和修正,并给出了残差阈值的计算公式。通过实验数据表明,门限检测法仅能对大部分野值点进行剔除,残差检测法在对野值点进行剔除和修正的同时会使得某些正常点与原始位置偏离,而改进残差检测法可以在对野值点进行剔除和修正的同时更好地贴合原始轨迹,未剔除野值点时的定位误差为55.68 m,使用改进残差检测法处理后的定位误差下降到了2.04 m,明显地减小了定位误差,具有较好的性能。因此,可将改进残差检测法用于工程实践中,提升长基线系统的定位精度。
