基于CSS技术的列车辅助防撞系统设计与研究
2020-03-23宗清泽梁汝军姜琨久
宗清泽, 张 丽, 梁汝军, 姜琨久
(中车南京浦镇车辆有限公司, 南京 210031)
城市轨道交通列车在运行过程中,列车的运行安全由列车自动防护ATP(Automatic Train Protection)系统予以保证。然而,由于城市轨道交通系统的高度复杂性,在实际运营中信号和车辆的故障时有发生,且由于ATP的故障导向安全设计,在大多数故障情况下会导致列车停车。在这种情况下,一般会切除ATP转为人工驾驶模式,此时列车缺乏设备层面的安全防护手段,误操作或人员疏忽可能会导致十分严重的碰撞事故,存在较大风险。
因此,研究出一种独立于信号系统且不干扰车辆其他设备、在ATP切除的情况下能有效防止列车碰撞的辅助防撞系统有很大的必要性和现实意义。
1 列车辅助防撞系统设计
1.1 系统组成
设计的列车辅助防撞系统主要由测距天线、RFID阅读器、地面信标、分析主机、操作屏、声光报警单元等设备组成,每列车头尾车各设一套独立的设备,见图1。

图1 系统结构示意图
首先,两端主机读取司机室激活信号确定各自工作状态,并通过RFID阅读器信息来确定列车的上、下行状态;然后,列车在ATP切除以后,自动激活辅助防撞系统,通过测距天线主动向前方发射问询信号,进而基于线性调频扩频(CSS)信号测距原理,结合SDS-TWR算法,计算前后列车的距离并评估,最后输出预警信息来辅助实现防撞功能。
1.2 工作原理
1.2.1主机工作状态
列车上电激活后,分析主机自动检测列车激活端钥匙信号,根据列车激活端钥匙信号来决定主机的工作状态:激活端主机处于主动搜索状态,非激活端主机处于被动应答状态。
1.2.2上、下行识别
列车进入正线后,列车运行于上行线还是下行线与受控司机室之间有一一对应关系,根据主控制器钥匙开关输出信号确定工作模式,并以此来判别自身是车头设备还是车尾设备,从而决定其工作状态[1]。但此方法仅适用于正线运行的列车,对于特殊区段(折返区段、存车线、库内、试车线等)的识别仍不明确,故本系统采用设置地面信标的方式来确定多种运行工况。该信标仅供辅助防撞系统使用,独立于信号系统,具体安装位置包括:
(1)出库线道岔处安装4个信标,见图2。

图2 正线道岔处信标布置示意图
(2)正线所有存在折返作业的道岔处均安装4个信标(以最复杂的存车线为例),见图3。

图3 存车线信标布置示意图
按照上述布置不仅可以满足正线列车的上、下行状态判断,还能满足特殊区段(折返区段、存车线、库内、试车线等)的状态识别,适用于各种复杂的地铁线路工况。
1.2.3辅助防撞工作机理
通过前述的主机工作状态和上、下行信息,建立前后列车的问询-应答式测距机制。主要工作步骤如下:
(1)在ATP切除模式下列车同时向前后发送问询信号;
(2)前车尾端的设备收到问询信号后,进行信号鉴别和数据校核,若符合预定的通信协议,则向后车发送应答信号,同时,后车头端的设备则向前车发送应答信号;
(3)车辆接收前、后车发射的应答信号并进行解码;
(4)车辆通过计算发送问询信号至收到应答信号的时间差T,计算车距;
(5)车辆示警终端实时显示前后车距离,若发现存在碰撞风险则提前发出声光示警,供驾驶员参考;当前后车距达到危险车距时,通过硬线输出紧急制动。
1.3 关键技术
基于线性调频扩频(CSS)信号定位技术,结合2.4G无线通信技术,运用SDS-TWR算法,研究并设计出独立于信号系统之外的列车辅助防撞系统。
1.3.12.4G无线技术
2.4G无线技术,其频段处于2.405~2.485 GHz之间。该频段无线技术无需许可证,只需要遵守一定的发射功率(小于1 W),并且不对其他频段造成干扰即可免费使用,这使得2.4G无线技术能够成熟地应用于本系统。
1.3.2线性调频扩频(CSS)无线测距技术
本系统采用的线性调频扩频(CSS)技术,其相较于GPS、超声波、移动网络、WLAN网络、ZigBee、无线射频识别RFID等无线定位测距技术,其优势如表1所示。
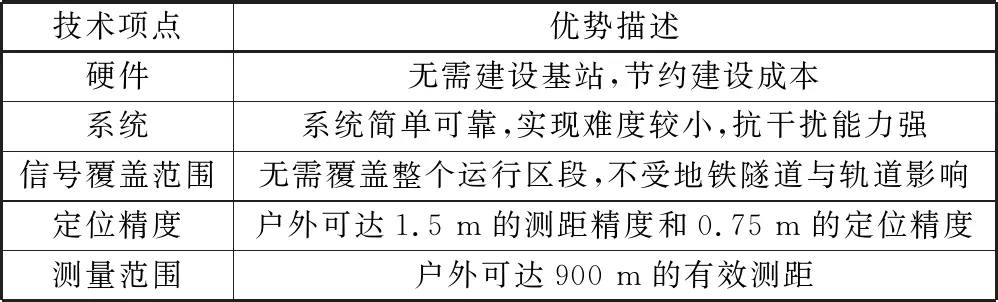
表1 线性调频扩频(CSS)技术性能优势表
1.3.3SDS-TWR算法
SDS-TWR的基本原理是利用无线通信中的传播时延来测量两点之间的距离。TWR测距法通过一次数据的往返来消除两个节点时间不同步的影响。SDS-TWR则是在TWR的基础上又进行了一次反向的TWR。其测距流程如下(后车车头为主动端,前车车尾为被动端):
(1)由后车车头向前车车尾发送测距数据包;
(2)前车车尾接收到该数据包后进行信号鉴别和数据校核,若符合预定的通信协议,则发出确认包,并计算从接受数据包到发出确认包之间的时延T2;
(3)后车车头接收前车车尾的确认包,并计算从发出测距数据包到接收确认包之间的时延T1;
(4)前车车尾发出测距数据包,其中数据帧包含T2;
(5)后车车头接收前车车尾发出的含有T2的测距数据包,经信号鉴别后发出确认包,并计算从接受该测距数据包到发出确认包之间的时延T3;
(6)前车车尾接受新的确认包,并计算从发出含有T2的测距数据包到收到新的确认包之间的时延T4;
(7)前车车尾向后车车头发出含有T4的测距数据包。

图4 SDS-TWR测距过程图
理论上,在第1次测量中,T1、T2是两倍的无线信号从后车车头到前车车尾的传播时延。同理,第2次测量中T3、T4也是两倍的无线信号传播时延。由此可知:后车车头至前车车尾的传播时延为:
(1)
设电磁波的传播速度为c,那么后车车头到前车车尾的距离计算式(2):
(2)
通过SDS-TWR算法,不仅能够消除时钟不同步造成的测距影响,还能消除两个节点之间时钟漂移误差造成的测距影响,进一步提高测距精度[2]。
2 列车辅助防撞系统功能实现
根据ATP切除后列车的运行需要,结合上述技术方案的工作原理,研究并设计出的辅助防撞系统具备以下功能:
(1)判断列车状态:能有效判断列车所处的上、下行状态,仅与同一股道上的列车通信;
(2)测距测速:能够测出本列车与前车的实时距离,为司机提供判断依据;
(3)预警:在车距达到预警距离时对司机进行预警,提醒司机及时减速;
(4)触发紧急制动:在达到危险车距时,人工触发紧急制动已有风险,系统直接输出紧急制动;
(5)试车线防护:能够为试车线为人工驾驶状态的列车提供防撞功能;
2.1 测距测速
前后列车建立通信后,通过SDS-TWR算法可获得两车之间的距离。分析主机需根据车辆牵引制动相关参数,计算列车的预警距离与紧急制动距离,计算的参数如表2(以运行速度80 km/h,紧急制动平均减速度1.2 m/s2为例):
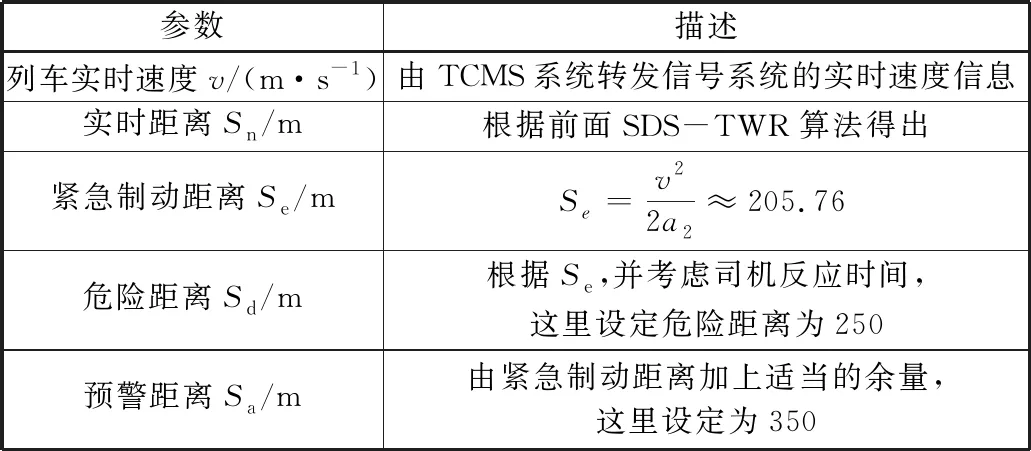
表2 测距测速所需参数计算表
2.2 预警信息及紧急制动
(1)当Sd(危险距离) (2)当Sn(实时距离)≤Sd(危险距离)时:系统输出I级危险信息,列车辅助防撞系统提供最高级示警,系统输出最高级声光报警,提示司机进行紧急制动,或在试车线模式时直接实施紧急制动。 当弯道弧长一定的情况下,弯道的半径越小,弯道曲率越大,无线信号折射次数也会越多。将隧道内的无线传输数学模型简化如图5。 图5 隧道弯道中无线传输的数学模型 图5为无线信号沿内径切线传播的电磁波路径图,计算在该路径下无线信号传播路径与实际弧长误差。表3所示为轨道半径不同时,无线信号发生6次折射的最大传播距离(这里认为在6次折射范围内,无线信号能正常通讯;超过6次,无法正常通讯),当超过该值时,通讯无法连接。 表3 轨道半径与最大传播距离对照表 从表3可以看出,在无线通信范围内,无线信号传播距离与弯道弧度距离相差较小(小于1%)。随着转弯半径的减小,无线信号的通信距离减小;随着转弯半径的增大,在不考虑信号衰减的情况下,通信距离增大。 为了保障列车在试车线的作业安全,系统在每条试车线两端各设置一套辅助防撞装置,试车线辅助防撞装置包括测距天线和分析主机。当作业车驶入试车线进行调试作业时,列车激活端司机室天线为主动探测端,试车线天线为被动应答端,主被动端之间建立通信,测定列车头端到试车线终点的距离,及时向作业人员发出警示。 图6 试车线安全辅助示意图 为验证所研究的辅助防撞系统可用性,在某地铁线路进行了正线验证试验。 图7 试验现场图片 经过实际追踪验证试验,前、后两列车车距在直线1 000 m范围内能有效捕获,其中安全距离(350 m以上)范围内次数为371次;预警距离(350 m以内)范围内次数为81次,捕获百分比为100%,距离和捕获次数的关系统计如图8所示。 图8 距离-捕获次数分布图 试验证明:基于线性调频扩频信号(CSS)测距技术的辅助防撞系统环境适应性好,抗干扰能力强,在小半径曲线和上下坡道区域能有效建立前后车通信实时测距,符合列车辅助防撞系统的功能需求。 无论是在正线ATP切除,还是在试车线人工驾驶模式下,文中所研究的列车辅助防撞系统,均能通过CSS技术实时测量同一轨道上两车之间的距离,进而为司机提供碰撞预警信息,同时在达到危险车距时输出紧急制动,从而保障列车的运行安全。该系统能够克服外界复杂电磁环境影响,具有探测范围广、可靠性高以及全天候工作的特点,为ATP切除后的列车提供了设备层面的安全保障,提高了城市轨道交通运行的安全性与可靠性。2.3 隧道弯道测距


2.4 试车线防护

3 试验验证


4 结束语