一种盲多波束形成GNSS天线阵抗干扰算法
2020-03-19唐庆辉戴鑫志
唐庆辉,戴鑫志,张 辉
(1.32022部队,武汉 430000;2.北京卫星导航中心,北京 100081)
0 引言
目前,全球卫星导航系统(Globe Navigation Sa-tellite System,GNSS)在军用和民用领域都发挥着不可替代的作用,但是GNSS本身十分脆弱,极易受到各种有意或无意的干扰,尤其是在导航战背景下,作为用户终端的GNSS接收机是各种恶意干扰的首要目标[1-2]。从信号处理角度看,GNSS接收机的抗干扰方法主要包括:时域抗干扰、频域抗干扰、空域抗干扰,以及混合域抗干扰[3-4]。其中,空域抗干扰和混合域抗干扰通常基于阵列天线,属于天线阵抗干扰范畴,是当前GNSS接收机最有效的抗干扰手段之一[5]。
根据能否在信号方向形成增益,天线阵抗干扰算法又分为零陷类算法和波束形成类算法。传统零陷类算法的代表是功率倒置(Power Inversion,PI)算法[6-7],PI算法能够自动在强功率干扰方向上形成零陷,但是该算法对期望信号没有增益。传统波束形成类算法的代表是最小方差无失真响应(Minimum Variance Distortionless Response,MVDR)算法[8-10]、最小均方误差(Minimum Mean Square Error,MMSE)算法[11]等。以MVDR算法为例,算法除了能够在强功率干扰方向形成零陷抑制干扰外,还能够根据信号导向矢量在期望信号方向形成增益,提高了抗干扰后输出信噪比,更高的信噪比意味着更好的捕获性能。
然而传统波束形成类算法在实现时需要先验信息的辅助,例如MVDR算法需要获得GNSS信号的导向矢量,MMSE算法需要获得参考信号。而这些先验信息往往是在GNSS接收机完成信号捕获跟踪后才能获得,这就到导致在GNSS信号成功捕获前,波束形成类算法无法正常工作,对于接收机捕获能力的提升毫无增益。
在导航对抗环境中,接收机随时可能处于信号捕获状态,例如,卫星由不可见变为可见,或者卫星信号由于靠近干扰源、障碍物而出现失锁,此时接收机需要重新捕获信号。然而传统的波束形成类算法在信号成功捕获前不能工作,无法提升接收机的信号捕获能力。针对上述问题,提出了一种盲多波束形成的GNSS天线阵抗干扰算法,该算法能够在信号捕获前对GNSS信号形成增益,从而提升接收机的信号捕获性能,使得接收机在干扰环境中具备更强的生存能力。
1 模型建立和问题描述
1.1 天线阵抗干扰模型
不失一般性,考虑一个N阵元的任意阵型天线阵。假设远场处有K个期望信号(GNSS信号)和L个干扰信号以平面波方式入射。由于接收机内部存在热噪声,因此接收机实际接收端的信号可以表示为期望信号、干扰信号和噪声的叠加,即

(1)

对于GNSS信号和干扰信号而言,由于它们的载波频点(1GHz~2GHz之间)一般都远远大于信号带宽(2M~20M),因此对信号建模时可以利用窄带假设。窄带假设下,信号到达各个阵元之间的延时可以用相位变化等效,各个阵元之间的相位差可以用导向矢量表示,导向矢量的一般定义式为[12]
(2)
其中,λ表示信号载波波长,zn,n=1,2,…,N表示一个3×1的指向阵元位置的矢量,4表示一个3×1的指向卫星位置的矢量。
典型的阵列加权输出模型如图1所示。

图1 阵列加权示意图Fig.1 Array weighting model
天线阵抗干扰就是通过抗干扰算法生成权值w,对各路信号加权求和后作为抗干扰输出
(3)
1.2 问题描述
对于传统的波束类形成算法,如MVDR算法和MMSE算法,其原理在本质上是相同的,因此本文在分析时仅分析了MVDR算法。MVDR算法对权矢量的约束条件为
(4)
式中,as表示期望信号的导向矢量,Rxx表示信号自相关矩阵,其定义如下
Rxx=E[x(t)xH(t)]
(5)
其中,E[·]表示数学期望,(·)H表示共轭转置。利用拉格朗日乘子法,可得到MVDR算法的最优权矢量为
(6)
结合式(3)和式(6),可以得出MVDR算法下,阵列抗干扰输出为
(7)

从MVDR算法原理可以看出,算法需要以信号导向矢量作为计算权矢量的参数。在GNSS接收机已经实现定位解算的条件下,接收机可以从星历中获取卫星位置,再结合接收机自身位置,即可得到GNSS信号导向矢量。但如果接收机尚未成功捕获GNSS信号,上述做法便无从下手。此时,GNSS接收机一般使用零陷类抗干扰算法。
PI算法是最经典的零陷类抗干扰算法之一。其权矢量的约束条件为
(8)

(9)
从PI算法原理可以看出,该算法不需要任何先验信息作为输入条件,这也是该算法的主要优点。
通过分析可以发现:MVDR算法的优势在于可以在GNSS信号方向形成增益,但不足之处是需要信号导向矢量作为输入条件,在信号尚未成功捕获阶段无法使用。PI算法的优势在于不需要任何先验信息作为输入条件,但是与MVDR算法相比,PI算法无法在信号方向形成增益。
针对上述问题,本文提出了一种盲多波束形成算法,借鉴MVDR算法形成波束的原理,在阵列上半球面形成多个盲波束,可提升信号捕获阶段信噪比,从而增强接收机在干扰环境下的生存能力。
2 本文算法
2.1 算法原理
从MVDR算法原理可以看出,算法约束了权矢量w与信号导向矢量as的关系,从而可以在信号方向上形成波束。类似地,对于一个给定的导向矢量a0,同样约束wHa0=1,那么阵列就会在与导向矢量a0对应的方向上形成波束。事实上,对于一个给定的天线阵,导向矢量是由信号入射方向决定的[9],为了方便表示这种关系,下文的导向矢量均用a(θ,φ)表示,其中θ表示信号入射方位角,φ表示信号入射俯仰角。
在信号捕获阶段,GNSS接收机不能获取GNSS信号导向矢量as(θs,φs),但是可以通过给定一系列导向矢量a(θk,φl),k=1,2,…,K;l=1,2,…,L,在阵列上半球面形成多个盲波束。只要真实的GNSS信号在波束覆盖范围内,就能对其形成一定的增益,具体算法如下:

对于运动载体,GNSS接收机的姿态会随着载体姿态的变化而发生变化。为了保证天线阵形成的波束始终指向上半球面,需要利用载体的姿态角(θcarrier,φcarrier)对导向矢量a(θk,φl)的角度进行校正。载体的姿态角一般可以通过载体携带的传感器获得。角度校正的过程实际上是坐标系旋转,由于坐标系旋转已有成熟的数学方法,且并非本文重点,这里不做详细介绍。
2.2 算法性能分析
首先是算法的抗干扰性能。容易知道,对于给定的导向矢量a(θk,φl),本文算法在(θk,φl)方向上形成了波束,本质上与MVDR算法形成波束的原理相同,因此,算法抑制干扰的能力与MVDR算法相同。然而,由于盲波束形成时使用的导向矢量a(θk,φl)可能与GNSS导向矢量as(θs,φs)不同,因此,本文算法对GNSS信号的增益与MVDR算法对信号的增益会有所差别,下面主要分析本文算法对信号形成的阵列增益。
(10)

(11)
式(11)实际上是对权矢量w进行了归一化,而同时省略了实常数μ。对于抗干扰后的GNSS信号有
(12)
因而,MVDR算法下,阵列对信号的增益为
(13)
将式(10)代入式(13)中,可得
(14)

G=10lgN(1-|ρ|2)
(15)
式(15)即为MVDR算法下,阵列对信号的增益,可以看出,当且仅当GNSS信号导向矢量as(θs,φs)与干扰信号导向矢量aJ(θJ,φJ)正交时,MVDR算法下阵列最大增益为Gmax=10lgN。
将式(11)中的导向矢量as(θs,φs)替换为盲波束的导向矢量a(θk,φl),即可得到本文算法下的抗干扰的输出
(16)
由于理论推导过程相似,这里直接给出本文算法下,阵列对GNSS信号形成的增益
(17)

2.3 算法参数选取
从算法原理可以看出,当方位角方向上波束划分数K越多,则各盲波束方位角间隔Δθ越小;同理,当俯仰角方向上波束划分数L越多,则盲各波束俯仰角间隔Δφ越小。而盲波束之间的空间间隔(Δθ,Δφ)越小,意味着盲波束指向越有可能接近GNSS信号的入射方向。此外,随着天线阵阵元个数增多,天线阵形成的波束宽度会逐渐变窄[12],图2和图3给出了四阵元圆阵和六阵元圆阵在同一个给定方向上的阵列增益图,可以明显看出六阵元圆阵形成的波束更窄。波束越窄,为了使得盲波束有较大概率对准GNSS信号方向,则各波束的空间间隔也应该越小。考虑上述因素,为了使得本文算法下的阵列增益Gproposed更加接近MVDR算法下的阵列增益GMVDR,K和L越大越好。
但另一方面,由于阵列形成的盲波束个数为(L-1)K+1,增大K和L会增加算法的计算复杂度,因此需要对K和L的取值有所约束。
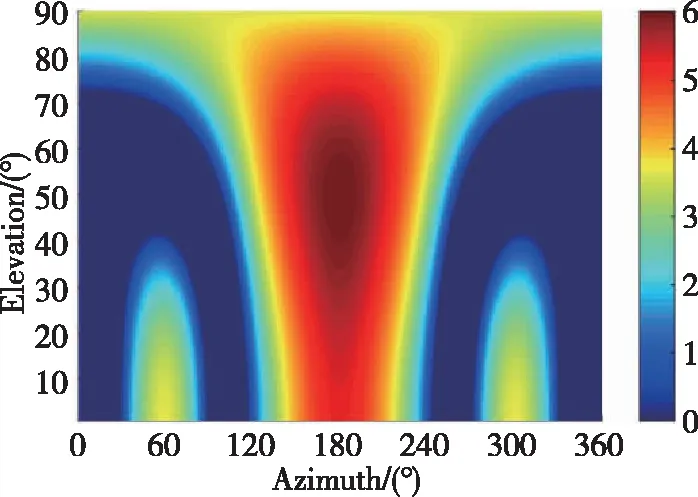
图2 四阵元圆阵阵列增益图Fig.2 Four antenna circular-array pattern
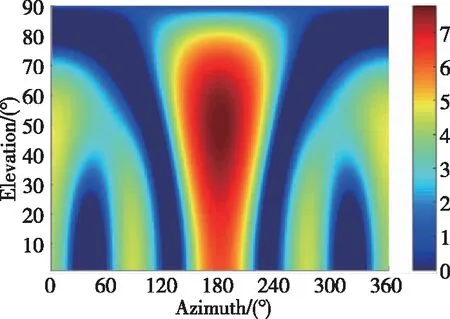
图3 六阵元圆阵阵列增益图Fig.3 Six antenna circular-array pattern
设定天线阵列为均匀圆阵,阵元数目分别取4、6、8时,采用数值计算得到的阵列主波束宽度分别如图4、图5及图6所示。这里的主波束宽度是指3dB波束宽度,即最大阵列增益方向两侧,阵列增益下降3dB时2个方向的夹角,分别为俯仰角方向和方位角方向。
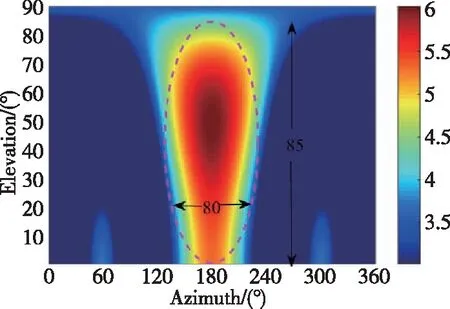
图4 四阵元圆阵主波束宽度Fig.4 Main beam width of four antenna circular-array

图5 六阵元圆阵主波束宽度Fig.5 Main beam width of six antenna circular-array
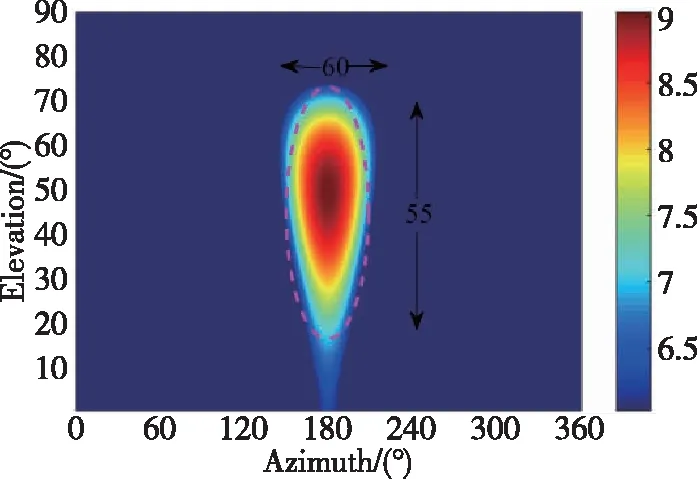
图6 八阵元圆阵主波束宽度Fig.6 Main beam width of eight antenna circular-array
图4、图5及图6一方面进一步证明了随着阵元个数增多,阵列形成的波束逐渐变窄;另一方面,可以得出,阵元数目为4、6、8时,主波束宽度分别为:(80,85),(75,80),(60,55),括号中第一个参数为方位角方向宽度,第二个参数为俯仰角方向宽度。
在不同的方位角和俯仰角划分数下,上半球面划分的网格宽度如表1所示。括号中第一个参数为方位角宽度,第二个参数为俯仰角宽度。
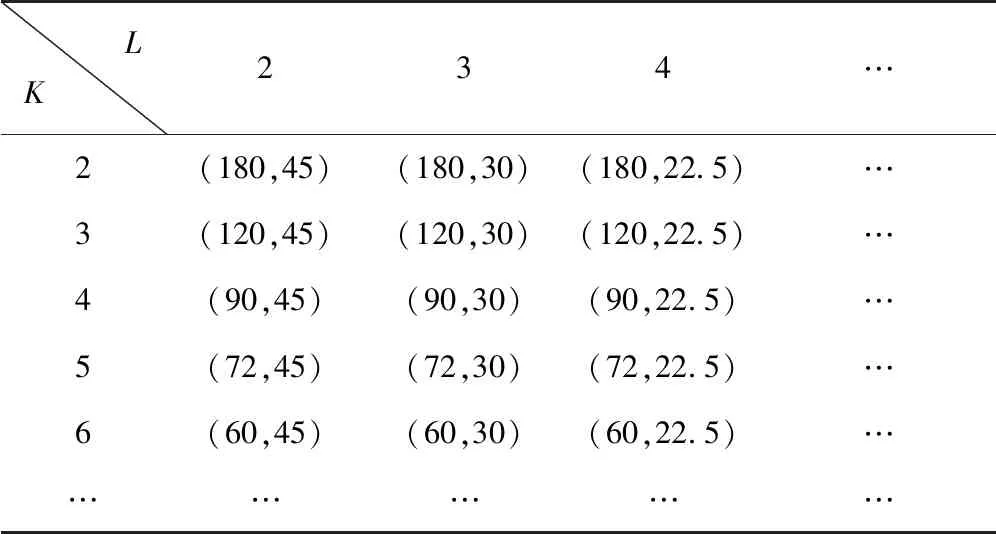
表1 不同划分数下的网格宽度Tab.1 Grid width under different division numbers
结合阵列主波束宽度及表1数据,可以得出:对于阵元个数N≤8的均匀圆阵,方位角方向波束划分数K≥6,俯仰角方向划分波束数L≥2时,本文算法下阵列对GNSS信号的增益Gproposed≥Gmax-3。考虑到算法的计算复杂度,K=6,L=2是比较理想的选择,此时总共形成了7个波束。由于实际使用中对天线阵尺寸的限制,本文仅分析了阵元数N≤8的情况,对于阵元数更多的天线阵可采用类似方法确定空间网格划分数目。
需要注意的是,这里并没有考虑干扰的影响,一个原因是实际条件下干扰的来波方向无法预知,由干扰导致的阵列增益Gproposed降低无法事先计算;另一个原因是GNSS接收机在某一时刻的可视卫星数一般在10颗左右,而干扰信号一般来自低仰角,并且数量远小于可视卫星数,故干扰只会对少数几个网格内的GNSS信号造成影响。因此,算法需要保证的是在没有干扰的条件下,GNSS信号落在某个网格内时能获得足够大的阵列增益。
3 仿真验证
为了验证本文算法的性能,利用软件接收机[15]进行仿真。仿真实验中天线阵为均匀圆阵,圆周半径为半波长,设定K=2,L=6,GNSS信号采用北斗B3民码信号,入射方向随机遍历整个上半球面(俯仰角高于10°)。干扰信号为一个20MHz宽带高斯干扰和一个B3频点单频干扰,干噪比均为50dB,干扰从低仰角方向随机入射(俯仰角小于15°),接收机的捕获门限设置为32dB·Hz。
仿真对比了经本文算法和PI算法抗干扰处理后,接收机成功捕获GNSS信号的概率。对于每个给定的信号输入载噪比,进行了10000次蒙特卡罗仿真。图7、图8和图9分别给出了阵元数为4、6、8时的仿真结果。从图中可以得出:
1)在存在干扰且输入信号强度低于接收机捕获门限(32dB·Hz)的条件下,使用本文算法后接收机的捕获性能明显优于使用PI算法的捕获性能,体现了波束形成的优势。
2)随着阵元个数增加,相同条件下本文算法的捕获成功率有明显提升。这是由于本文算法约束了阵列对GNSS信号的增益Gproposed≥Gmax-3,阵元个数越多,算法产生的增益就越大,因此捕获成功率也会提高。说明随着阵元个数增多,使用本文算法的接收机将具备更强的信号捕获性能。

图7 捕获性能随信号输入载噪比变化情况(N=4)Fig.7 Acquisition performance under different signal input carrier-to-noise ratio(N=4)
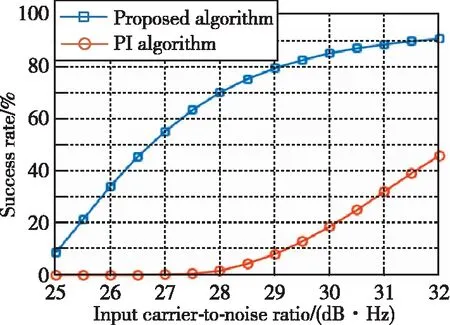
图8 捕获性能随信号输入载噪比变化情况(N=6)Fig.8 Acquisition performance under different signal input carrier-to-noise ratio(N=6)
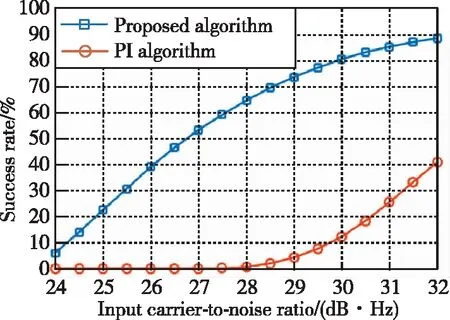
图9 捕获性能随信号输入载噪比的变化情况(N=8)Fig.9 Acquisition performance under different signal input carrier-to-noise ratio(N=8)
4 结论
本文提出了一种基于盲多波束形成的GNSS天线阵抗干扰算法,在不借助GNSS信号导向矢量作为先验信息的条件下,在空间形成多个盲波束,从而实现了对GNSS信号的增益。本文分析了算法原理、算法性能以及算法参数选取,最后通过软件接收机验证了算法性能,仿真结果表明:与传统的PI算法相比,本文算法能够明显提升接收机在干扰环境下的信号捕获能力。
由于本文算法在实现时需要使用多个波束形成器,因此计算复杂度较PI算法更高。但是与MVDR算法相比,本文算法使用的波束形成器可以与MVDR算法通用,因此计算复杂度与MVDR算法相当。
