考虑预碰撞时间的自动紧急制动系统分层控制策略研究*
2020-03-18兰凤崇李诗成陈吉清
兰凤崇,余 蒙,李诗成,陈吉清
(1.华南理工大学机械与汽车工程学院,广州 510640; 2.华南理工大学,广东省汽车工程重点实验室,广州 510640)
前言
我国是交通安全事故中死亡人数最多的国家之一,交通安全问题引起社会的广泛关注,如何减少或避免交通事故发生成为汽车技术研究的重点[1]。随着智能汽车的不断发展,越来越多的企业进行主动安全技术研究,希望以此来提高汽车安全性能。在主动安全技术方面,车辆自动紧急制动系统(automatic emergency braking systems,AEB)可有效减少意外碰撞事故发生[2]。
目前自动紧急制动系统的控制策略一般是采用安全距离和安全时间对车辆安全状态进行判断[3]。安全时间模型是通过车辆之间的运动关系计算碰撞时间,与安全时间阈值比较,确定车辆制动状态。安全距离是指车辆在当前行驶状态(如地面附着条件、车辆最大减速度等)下,车辆能及时避开与障碍物的碰撞需要保持的最小距离。安全距离模型主要有Berkeley模型、Mazda模型和Honda模型等[4]。此外有研究提出了考虑其他因素的安全距离模型,比如考虑乘坐舒适性的安全距离模型[5]、考虑驾驶员特性的安全距离模型[6]等。
每种控制策略考虑的侧重点不一样,在不干扰驾驶员正常驾驶前提下,考虑预碰时间的纵向避撞算法性能最优[7]。但考虑安全时间模型,无法明确界定制动减速度和安全时间阈值,且缺乏对乘员舒适性的考虑,不能保证控制策略的可靠性。
为提高车辆控制的稳定性和安全性,杨为等[8]搭建了对行人保护的分层控制避撞策略,通过上层模糊控制和下层PID控制实现精准预警和制动,但其制动减速度和预碰撞风险评估模型是基于经验值判断,无法真实反映驾驶员的操作特性,进而无法满足舒适性要求。
追尾碰撞的深度调查交通事故数据显示,大部分事故是因为驾驶员对车辆行驶状态的误判,导致无法及时做出准确的制动操作,从而造成事故的发生[9]。对车辆行驶状态进行准确判断和对驾驶员紧急制动行为进行研究,从而对车辆自动紧急制动系统进行决策和控制是保证车辆安全的前提。
对深度事故调查数据进行统计分析,得到驾驶员在紧急状态下的制动行为,进而分析车辆制动减速度和安全时间阈值,搭建安全风险评估和制动决策模型。根据交通事故深度调查数据,综合考虑安全时间模型各阈值、乘员舒适性和安全距离等因素,确保控制策略的有效性和可靠性。
为简化控制系统,提高控制策略的可靠性和效率,针对系统决策制动需要在不同状态之间实时切换的问题,在充分考虑乘员舒适性和安全性的前提下,上层控制模型考虑预碰撞时间对制动减速度进行决策,下层控制器运用模糊PID对车辆制动压力进行控制,以达到控制精度和效率。对追尾事故场景进行重建,在标准测试工况下,对控制策略进行仿真验证,结果表明控制策略在满足新的汽车安全碰撞评价规程的同时能够提升汽车主动安全和实现有效避撞。
1 紧急制动决策模块搭建
在行驶过程中,上层控制器接受环境感知系统或事故深度调查数据还原的周围环境信息和车辆自身状态信息确定预碰撞时间,从而确定车辆行驶状态的安全性。两车同向运动过程中,自车和前车距离drel可以用时间指标Tttc来衡量。Tttc的计算与自车、前车的行驶状态信息(自车行驶速度v0、加速度a0、前车行驶速度v1、加速度a1)有关。Tttc关于v0,a0,v1,a1,drel的状态函数f(v0,a0,v1,a1,drel)为

其中,相对速度v0-v1设为vrel、相对加速度a0-a1设为arel,所以预碰撞时间与相对距离drel、相对加速度arel和相对速度vrel有关。
计算预碰撞时间时,需要考虑发生碰撞时前车的运动状态,假设发生碰撞时前车还以一定速度行驶,即当Δ2areldrel≥0时,两车可能发生碰撞,预碰撞时间Tttc为
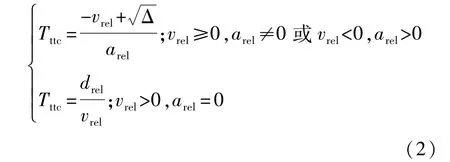
当自车速度和加速度均小于前车时(vrel≤0,且arel≤0),两车不会发生碰撞。
若碰撞发生时前车已经停止,前车制动到停止时间为Tb=-v1/a1,若Tb>Tttc,则输出Tttc;当0≤Tb≤Tttc时,则发生碰撞时前车已经停止,故输出预碰撞时间为Tttc1,即

将预碰撞时间输入制动状态决策模块,根据车辆行驶状态和传感器数据决策出制动减速度a0。紧急制动减速度的大小与驾驶员舒适性和安全性有关,其阈值关系到车辆安全和人体舒适性,从国家事故深度调查数据库(NAIS)中抽取轻微碰撞事故过程分析驾驶员采取的紧急制动行为,还原某起碰撞事故调查制动数据见图1,拟合得到驾驶员平均制动减速度为
式中:vb和va分别为制动过程任意两个时刻的车速;Δs为制动过程车辆所前进的距离。
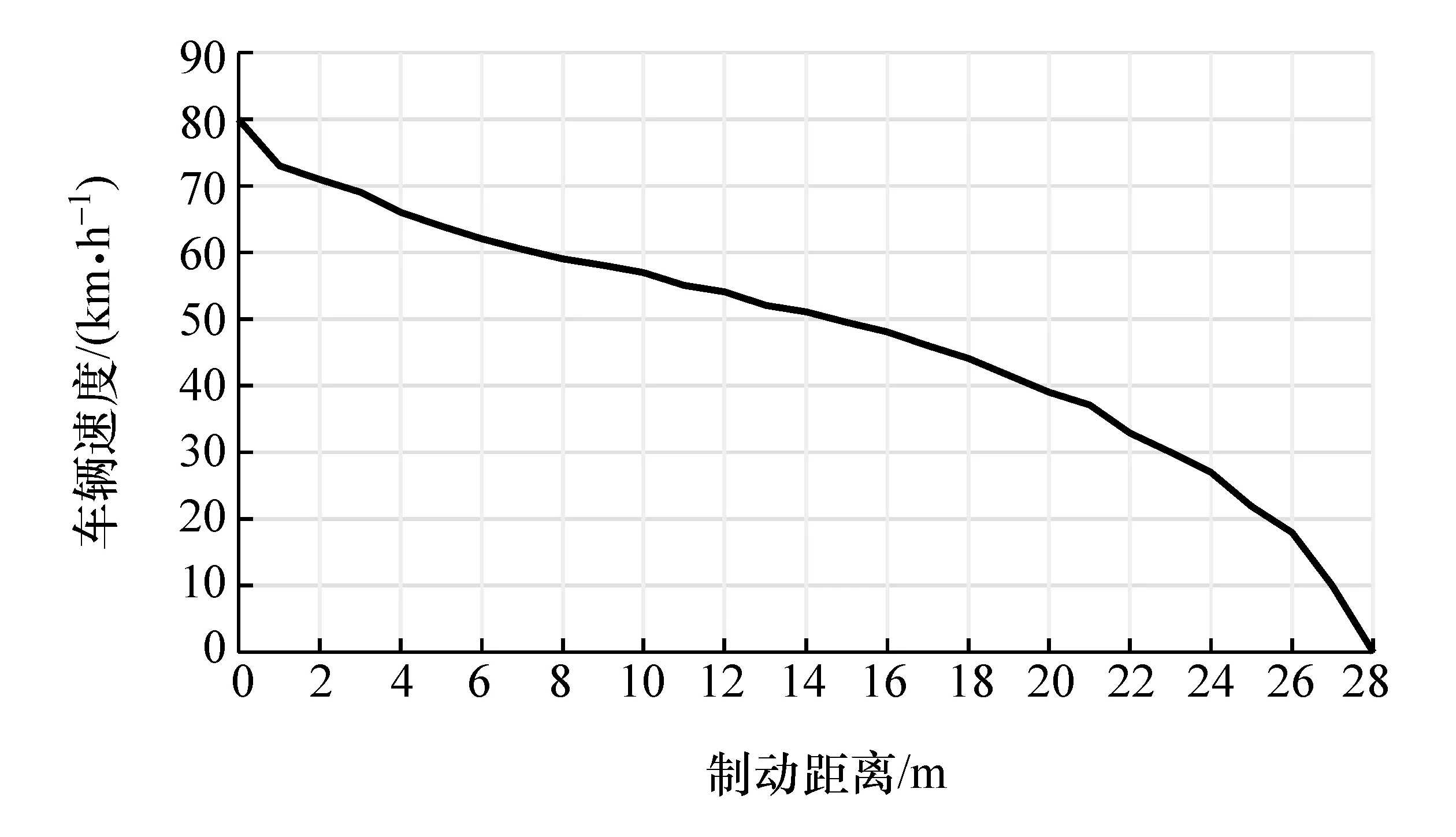
图1 碰撞深度事故调查制动数据还原
还原紧急制动位移和速度可以反映驾驶员紧急制动行为。从图1可知,驾驶员制动操作可分为一级制动和二级制动两个阶段,其制动平均值可拟合为一级制动减速度和二级制动减速度。
由碰撞事故紧急制动还原数据确定紧急制动策略为分级制动,统计驾驶员紧急制动行为确定分级制动减速度阈值。抽取100起轻微碰撞事故中统计还原驾驶员制动过程的一、二级平均减速度值(aaverage1和aaverage2),按区间分布求得的平均减速度见表1。

表1 碰撞事故中驾驶员制动的平均减速度
为提高车辆在紧急制动过程的舒适性和安全性,根据表1统计的一级和二级平均制动减速度均值,对一、二级制动减速度进行调整,一级制动减速进行适当放大,二级制动减速进行适当缩小,其中,一级制动减速度调整为-4.0 m/s2,二级制动减速度调整为-7.1 m/s2。
普通城市工况车辆限速一般为60 km/h,当车辆以60 km/h前进时,以一级减速度制动需要的制动距离为34.72 m,故其预碰撞时间阈值T1约为2.1 s。以二级减速度制动需要的制动距离为19.56 m,故其预碰撞时间阈值T2约为1.2 s。分级制动能够降低紧急制动对正常驾驶行为的干预和提升乘员舒适性,结合以上预碰撞时间阈值选择距离静止目标初始距离为40 m,一级制动阈值变化范围为1.8~2.1 s;二级制动阈值变化范围为0.6~1.5 s,以0.1 s为间隔用排列组合的方式选择阈值进行仿真,选取部分特征加速度变化绘制曲线如图2所示,制动参数情况如表2所示。

图2 减速度变化曲线

表2 不同预碰撞时间阈值制动参数
从图2可知,当阈值过大时容易干扰驾驶行为,且出现3个制动状态,分别为初次一级制动、二级制动和再次一级制动,故适当减小T1和T2能够减少干扰,延后一、二级制动介入时间,延长一级制动持续时间使舒适性得到保障的同时驾驶员在一级制动介入后有充分的反应时间。在确保安全的前提下,综合考虑紧急制动介入时间,一、二级制动持续时间和制动距离等因素,多次仿真确定一级制动预碰撞时间阈值为1.9 s,二级制动预碰撞时间阈值为0.9 s,分级制动减速度控制逻辑为系统启动二级制动,输出的期望减速度为-7.1 m/s2,车辆处于危险工况,采取二级制动状态保持到停车。
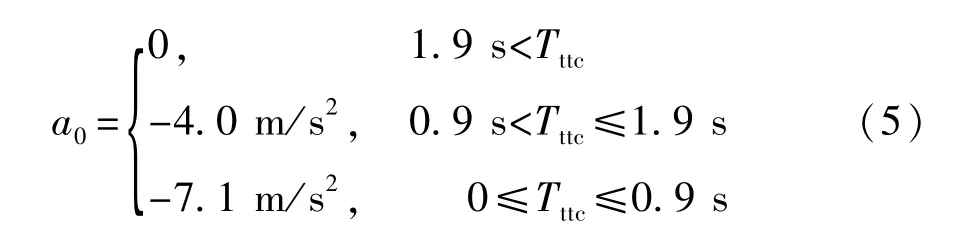
根据《营运车辆自动紧急制动系统性能要求和测试规范》JT/T 1242—2019标准要求,紧急制动阶段不应在Tttc大于等于3.0 s前开始,当预碰撞时间大于1.9 s、小于等于3.0 s时,发出危险提示,车辆保持当前速度继续行驶,输出的期望减速度为0;预碰撞时间大于0.9 s,小于等于1.9 s时,输出的期望减速度为-4.0 m/s2,车辆属于制动缓冲区,为防止系统振荡,设定一级制动状态至少保持0.5 s;当预碰撞时间小于0.9 s时,一级制动已经不能避免碰撞,
2 下层执行控制模块搭建
2.1 下层控制器结构
上层决策模块输出的车辆制动状态和制动减速度值,不能直接作用于车辆模型。需要将上层控制器输出的加速度值转化为可直接输入车辆动力学模型的信号,如节气门开度和制动主缸压力等,为达到控制的精度和效率,使用PID误差控制模型对车辆制动压力进行控制,其结构见图3。
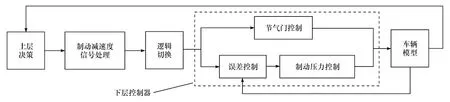
图3 下层控制器结构
2.2 车辆参数
在深度事故调查华南地区追尾事故数据库中获得有关SUV车辆发生追尾的资料,为尽可能还原事故车辆的动力学性能,在Carsim中选取一款D级车进行车辆逆动力学模型仿真。发动机模型选用Carsim内置的150 kW发动机,制动系统带有ABS,两前轮的制动转矩和制动压力的关系是250 N·m/MPa,两后轮的制动转矩和制动压力的关系是100 N·m/MPa。传动系选取6挡变速器,悬架选用独立悬架,轮胎尺寸为215/55 R17型轮胎,车轮滚动半径为0.325 m,部分参数见表3。
2.3 逻辑切换与车辆控制
在车辆减速过程中,经过状态切换临界点时可能会出现预碰撞时间信号短暂振荡的情况,这样会导致决策模块输出的期望加速度值出现振荡,进而输出错误信号,严重干扰驾驶员。因此设计信号过滤模块,检测决策输出的连续多个期望加速度,只有当期望加速度信号连续多个采样时间都保持不变时,信号处理模块才输出相应的期望加速度至控制模块,从而提高控制策略的稳定性。Memory模块存储上一个采样时间的状态值,采用4个Memory模块,当前状态值与4个Memory的状态值一致时,输出当前状态值,否则输出第4个采样时间前的状态值,当输出制动减速度为0时,切换到节气门控制,否则,切换到制动压力控制。

表3 车辆参数
2.3.1 节气门开度控制
当上层决策模块输出制动减速度为0时,切换到节气门控制,在正常路面行驶,节气门开度与车速有关。在Simulink中用Look Table模块对节气门控制进行仿真建模,在Carsim中联合仿真得到不同车速下节气门开度值如图4所示。

图4 节气门开度曲线
2.3.2 制动压力控制
当上层决策模块输出制动减速度为一级制动或二级制动时,切换到制动压力控制。在平坦的地面上,考虑车辆轮胎模型的车辆制动运动学方程为

式中:m为车辆质量;aexp为期望减速度;Fx为轮胎所受纵向力;Fv为空气阻力;Rx为轮胎滚动阻力。
当处于制动状态时,驱动力为0,车轮所受纵向力为车辆期望制动力,且与车轮滑移率成正比。

式中:sxi为车轮滑移率;rd为车轮半径;ωi为车轮角速度。
根据Dugoff轮胎模型理论有

式中:Fzi为每个轮胎的法向力;Csi为车辆纵向刚度;μ为地面附着系数;λi为轮胎动态参数。
车辆行驶时,所受到的空气阻力为

式中:ρ为空气密度;CD为空气阻力系数;A为迎风面积;vx为车速;vw为风速。
车辆行驶时,车轮滚动阻力正比于法向载荷,即

式中:f为滚动阻力系数;FZ为轮胎法向力。
故当车辆处于制动状态时,可求得在期望减速度下行驶的车辆期望制动力矩为

车辆行驶在平坦的路面且未超过路面所能提供的最大制动力时,制动力和制动主缸压力近似线性关系为

式中:Tbr、Tbf分别为制动时前后轮的力矩;r为轮胎的滚动半径;pb为制动主缸压力。切换到制动压力控制时,计算需要的制动主缸压力,输入给车辆制动系统。
2.3.3 PID误差控制
为保证误差精度和控制器反馈效率,减小上层决策模块输出的期望加速度和车辆模型实时输出加速度之间的误差,选择反馈PID控制器对误差进行控制,PID控制系统由PID控制器和被控对象组成,控制误差e(t)为上层控制器输出的期望加速度aexp和实际加速度av的差值,即
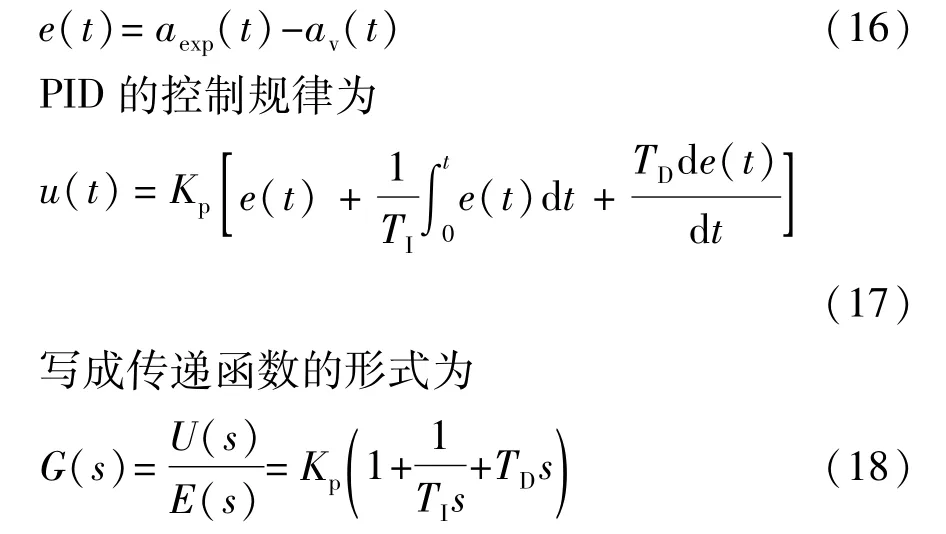
式中:Kp为比例增益;TI为积分时间常数;TD为微分时间常数。用试凑法求PID控制器的3个参数[10],确定下层PID控制器的比例、积分和微分参数值分别为:Kp=9,Ki=150,Kd=0.02,整体仿真模型如图5所示。
为验证PID控制器的简单、高效和准确性,对比基于最佳滑移率下的滑模变控制仿真算法[11],以60 km/h接近静止目标,其加速度变化曲线如图6所示。
由图6可知,基于最佳滑移率的控制算法控制过程较精确平滑,但控制算法搭建过程较复杂,效率较低,且在1.76和3.43 s加速度变化的临界点存在较大抖振现象,而PID控制算法总体较平缓,且较稳定、简单高效,故使用PID控制算法进行反馈控制。
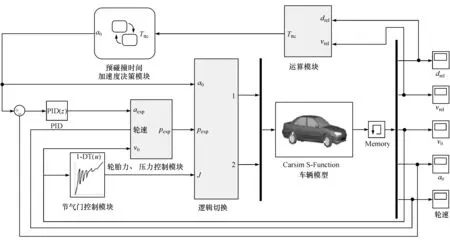
图5 整体仿真模型

图6 制动减速度变化对比曲线
3 控制策略安全性测试评价
近些年国内外机构陆续出台了针对AEB的测试评价规程[12],Euro-NCAP是其中具有一定代表性和广泛性的测试评价规程。Euro-NCAP将AEB测试工况分为自动紧急制动系统城市工况和城间工况。在城市道路行驶时,车辆行驶速度较慢,车辆速度在10~50 km/h,故设置车辆接近静止目标或接近缓速移动目标来模拟车辆在城市道路中的状态。在城间道路行驶时,车辆保持较高速度行驶,前方车辆遇到突发情况会紧急制动,车辆需作出快速反应,故设置车辆接近紧急制动目标来模拟车辆在城间道路下的状态。
中国汽车技术研究中心发布的2018版C-NCAP中增加了AEB的追尾评分项目,AEB追尾评分项目在C-NCAP总评分表中占8%。C-NCAP中AEB的追尾测试项目包括前车静止、前车慢行、前车制动3种工况。
Euro-NCAP测试项目中车辆在接近静止目标和接近缓速移动目标时,自车速度变化范围更大,涵盖了C-NCAP中车辆在接近静止目标和接近缓速移动目标时的自车速度。在前方车辆制动工况下,Euro-NCAP设定前方车辆分别以-2 m/s2的减速度常规制动和以-6 m/s2的减速度紧急制动,而C-NCAP只设定车辆以-4.0 m/s2的减速度制动。
为了全面对控制策略有效性进行验证,对比CNCAP和Euro-NCAP中关于AEB的测试评价规程,选用Euro-NCAP中AEB的4种测试工况和C-NCAP中不同于Euro-NCAP的接近制动目标的工况,建立水平路面长为1 200 m,路面附着系数为0.85,雷达最大探测距离为100 m的自动紧急制动仿真测试场景。
3.1 城间工况安全性测试
在城间工况下,自车以60 km/h的速度接近静止目标,目标之间初始距离为60 m,仿真时长为7 s,仿真结果如图7所示。
从图7(a)可知,自动紧急制动控制系统操作分为保持车速、一级制动、二级制动和停车4个阶段。开始时车辆做匀速运动,在1.67 s时车辆进入减速度为-4.0 m/s2的一级制动状态,且继续接近静止目标,在3.37 s时车辆进入减速度为-7.1 m/s2的二级制动状态,在4.7 s时车速减为0,车辆停车。从图7(b)可知,两车相对距离不断减小,自车停车时和目标的最小相对距离为2 m。因为前车静止,相对速度和自车速度变化一致,相对速度先保持不变,后逐渐减小为0。车辆初始速度为60 km/h时,设计的控制策略能够有效避撞。

图7 以60 km/h接近静止目标时仿真结果

图8 初始距离为40 m接近紧急制动目标时仿真结果
3.2 城市工况安全性测试
在城市工况下,前车突然紧急制动是造成追尾事故的重要原因之一。令自车和前车都以50 km/h的速度行驶,两车初始距离为40 m。仿真时间为10 s,在4 s时前车以-6 m/s2的减速度制动,仿真结果如图8所示。
从图8(a)可知,在0~4 s内,前方车辆和自车都匀速行驶,在4 s时,前车以-6 m/s2的减速度制动并于6.32 s将车速降为0,自车在4~6.23 s仍然匀速行驶,在6.23~8.28 s自车进入减速度为-4.0 m/s2的一级制动状态,在8.28~9.08 s自车进入减速度为-7.1 m/s2的二级制动状态。从图8(b)可知,两车的相对距离在0~4 s时保持不变,在4 s后相对距离逐渐减小,在9.08 s自车速度降为0时,相对距离达到最小值。两车的相对速度在0~4 s时保持不变,在4 s后相对速度逐渐增加,在6.32 s目标车速降为0时,相对速度达到最大值,之后逐渐减小,在9.08 s自车速度降为0时,相对速度为0。仿真结果表明,在初始距离为40 m的条件下接近紧急制动目标时,设计的控制策略能够有效避撞。
由城间和城市安全测试工况结果可得,设计的控制策略能够避免碰撞,此外,对安全评价规程要求的其他工况下进行仿真,在Euro-NCAP测试工况下,接近静止目标时在车速低于65 km/h时能够完全避撞,在车速高于65 km/h时车辆不能完全避撞,但能大大降低碰撞车速,减少碰撞伤害;车辆接近缓速移动目标时能够完全避撞;接近常规制动目标和紧急制动目标时,设计的控制策略能够完全避撞。接近C-NCAP测试工况中的以-4.0 m/s2减速度制动的前方目标时,设计的控制策略能够完全避撞。
4 追尾工况实例仿真应用
国家质量技术监督局联合国内高校建立交通事故深度调查系统,其数据库在国内具有很强的代表性和影响力。NAIS数据库中每条案例数据的事故调查和重建过程包括事故信息采集、事故分析、PCCrash事故再现仿真、事故报告撰写、数据上传、专家评审等过程,NAIS数据库中的案例清晰地对事故案例进行事故重建,对汽车主动安全和自动驾驶汽车智能控制等技术的发展具有重大意义。
对华南地区实际事故调查中的某SUV与一货车发生追尾碰撞,造成SUV驾驶员死亡的典型车辆追尾事故案例进行事故重建与分析,获取事故发生时的交通场景。根据采集的事故信息进行事故分析,绘制碰撞过程CAD图,如图9所示,图中保留了初始碰撞点、车辆最终位置、制动痕迹等信息。

图9 事故碰撞过程CAD图
PC-Crash根据事故现场大致碰撞点、碰撞后车辆运动轨迹、制动后轮胎痕迹等路面状况信息,对事故进行仿真重现[13]。将采集参数导入到PC-Crash中,在PC-Crash中进行事故再现仿真,导入车辆外形,编辑车辆变形量,通过初始状态设置碰撞位置和角度以及碰撞序列,设置碰撞前、中、后的加速度和转向等参数,得到的仿真结果与CAD事故图中车辆等参与方最终位置及运动轨迹相吻合,事故再现仿真见图10,图中数字单位为m。

图10 PC-Crash事故再现仿真
结合该追尾事故案例再现仿真和采集的信息进行事故分析,得出该追尾事故的过程:SUV以100 km/h的速度接近以47.5 km/h时速匀速行驶的货车,SUV驾驶员发现危险后全力制动,并轻微向右转向,货车驾驶员未发觉危险继续以原速度行驶,事故发生时SUV撞到货车尾部,事故造成SUV驾驶员死亡,其他乘客没有受伤。
在Carsim中搭建追尾事故场景,在该场景下进行自动紧急制动控制策略的仿真试验,自车的初始速度为100 km/h,目标车(大货车)保持47.5 km/h时速匀速行驶,两车之间的初始距离为60 m,仿真结果见图11。
从图11(a)可知,0~2.2 s自车保持以100 km/h速度行驶,在2.2~4.36 s时自车进入减速度为-4.0 m/s2的一级制动状态,4.36~6 s自车进入减速度为-7.1 m/s2的二级制动状态。从图11(b)可知,在5.18 s时自车和前车车辆的相对速度为0,两车之间的相对距离达到最小值;之后两车相对速度继续减小,两车相对距离逐渐增加,有效避免了追尾事故。仿真结果表明,设计的控制策略在该真实追尾事故场景下能够有效避撞。
5 结论
(1)考虑预碰撞时间的自动紧急制动系统控制策略,解决了自动紧急制动系统控制策略中离散的制动状态和状态之间切换建模困难的问题。利用碰撞深度事故调查数据库分析驾驶员制动行为,能够充分考虑驾驶员特性。在保证乘员舒适性的前提下采用分层控制策略对车辆制动状态进行控制。
(2)在Euro-NCAP和C-NCAP的测试工况下对设计的控制策略进行了仿真试验。仿真结果表明,设计的控制策略能够有效避撞。控制策略作为系统的决策模块,对自动紧急制动系统的研究和发展具有一定的参考价值。

图11 真实事故场景下仿真结果
(3)利用国家车辆事故深度调查体系,采集真实追尾事故案例进行事故重建,获取中国道路环境下真实追尾事故场景,在Carsim中搭建该追尾事故场景进行仿真,仿真结果表明在该真实追尾事故场景下控制策略能够有效避撞,为自动驾驶汽车主动安全系统研究提供帮助。