小口径火炮后坐位移测试方法研究
2020-03-17李世立任俊龙
雷 强,李世立,任俊龙
(西北机电工程研究所,陕西 咸阳 712099)
0 引 言
小口径火炮在发射弹丸时,火炮自动机后坐部分在膛内火药气体压力作用下,会发生向后运动,同时产生一定的后坐力和后坐位移[1]. 火炮制退机在后坐过程中,主要提供与后坐方向相反的阻力,阻碍火炮自动机后坐运动,以保证火炮发射的稳定性[2],因此制退机的性能至关重要,它不仅影响着火炮的密集度,也影响火炮的射击效率[3]. 火炮后坐位移是用来评价制退机性能的一项重要参数,其大小往往能够反映出火炮制退机的制退性能优劣[4]. 因此小口径火炮射击试验时,均进行火炮后坐位移曲线测试,为火炮自动机优化设计和故障诊断识别提供必要的数据支撑.
目前靶场环境下有多种火炮后坐位移曲线测试方法,如激光CCD法[5]、 激光测振仪法[6]、 高速摄像法[7]、 钢丝位移法[8]和后坐加速度计法等,其中钢丝位移法和后坐加速度计法属于接触式测量. 钢丝位移法是利用钢丝位移传感器实现火炮后坐位移曲线测试,其传感器频响一般较低,无法适用于高射速的火炮测试中. 后坐加速度计法是通过在火炮后坐部分安装与后坐方向一致的加速度计测量火炮后坐加速度值,通过数据积分处理获取火炮后坐位移,该方法属于间接测量法,在数据处理时容易引入积分误差,造成后坐位移曲线测试精度降低. 对于小口径火炮后坐位移测试,这两种接触式方法并不适用,主要是因为小口径火炮自动机尺寸小、 结构紧凑,测试装置安装空间有限,测试位置对传感器结构、 尺寸要求苛刻,以及后坐运动具有发生时间短、 位移量小、 连发射频高等特点,要求传感器有较高的动态性能. 本文仅对小口径火炮后坐位移测试常用的激光CCD法、 激光测振仪法和高速摄像法等3种非接触式方法作讨论研究.
1 测试方法
小口径火炮后坐位移曲线的主要特征量有后坐位移最大值,后坐位移最大值持续时间等. 为了便于激光CCD法、 激光测振仪法和高速摄像法获取的数据具有同一时间基准,针对同一发弹丸射击试验,将这3种方法获取的测试信号同时接入数据采集器中[9],实现三者测试数据的对比.
1.1 激光CCD法
激光CCD法是利用激光CCD位移传感器测试火炮自动机后坐位移曲线的一种非接触式方法. 该方法测试原理如图 1 所示,传感器内部激光器发射的激光束照射在运动物体上,经过物体表面漫反射,成像在传感器内部CCD敏感元件上.
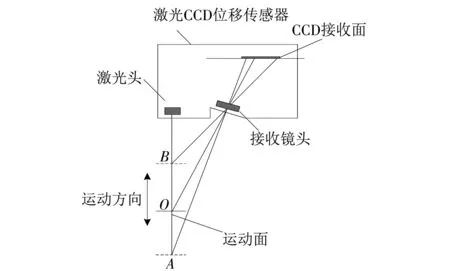
图 1 激光CCD位移传感器测试原理Fig.1 Testing principe for laser CCD displacement sensor
传感器是利用三角原理将运动物体位移转换为激光光斑位移,通过激光信号检测,将其转换成与物体位移成正比的电压信号,通过数据采集器采集与数据处理,输出后坐位移曲线[5].
激光CCD测试火炮后坐位移过程如图 2 所示. 激光CCD位移传感器固定于不动结构上或用支架工装固定于火炮正后方,激光束垂直照射于火炮后坐部分. 调节传感器与火炮后坐部分的距离,确保后坐位移的整个过程在传感器的测量范围内. 当火炮后坐时,传感器感应到火炮后坐与传感器之间位移量的变化,通过数据采集器记录和事后数据分析,可以获取火炮后坐位移曲线,得到后坐位移特征量.

图 2 激光CCD法测试后坐位移示意图Fig.2 Diagram of recoil displacement test for CCD method
激光CCD位移传感器因可靠性高,抗振性能好等优点,被大量应用于火炮振动位移测试中. 此外激光CCD位移传感器分辨率能够达到微米级,测试误差≤0.1%,且具有不同系列量程,可满足火炮后坐位移对测量精度和测量范围的要求,适用于不同口径火炮测试需求. 但因其属于光学测量设备,容易受火炮发射时的火光、 烟雾以及激光传播路径上遮挡物的干扰,因此在测试时,需要选择合适的测试位置,避免干扰物对其光路的干扰,影响测试信号的准确性.
激光CCD位移传感器的安装位置一般需要靠近火炮或在火炮架体上,这就要求传感器的安装要牢固可靠,尽量使传感器发射的激光束垂直稳定照射在火炮测试面上. 图 3 所示为传感器安装角度对测试结果的影响示意图.
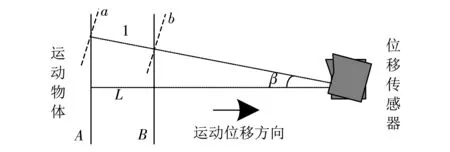
图 3 安装角度对测试结果影响示意图Fig.3 Diagram of test result caused by installation angle
假设传感器安装角度偏差为5°(一般可控制在5°内),运动物体由A位置运动到B位置时后坐位移为25 mm时,由公式l=L/cosβ,相对误差σ=(l-L)/L知,传感器安装将造成0.38%的系统误差. 总体来说,该方法是一种较为理想的火炮后坐位移测试方法,能够适用于各类常规火炮后坐位移曲线测试.
1.2 激光测振仪法
激光测振仪法是通过激光测振仪获取火炮自动机后坐位移曲线的一种非接触式方法. 激光测振仪利用光学多普勒效应测试物体运动位移,当激光照射到运动物体表面时,激光被镜面反射,造成反射光的频率发生变化,利用发射激光(f0)及反射激光(f1)频率变化与物体运动速度成正比的关系,可以测出物体的运动速度,然后通过软硬件积分运算,得到火炮后坐位移[6],其测试原理如图 4 所示.
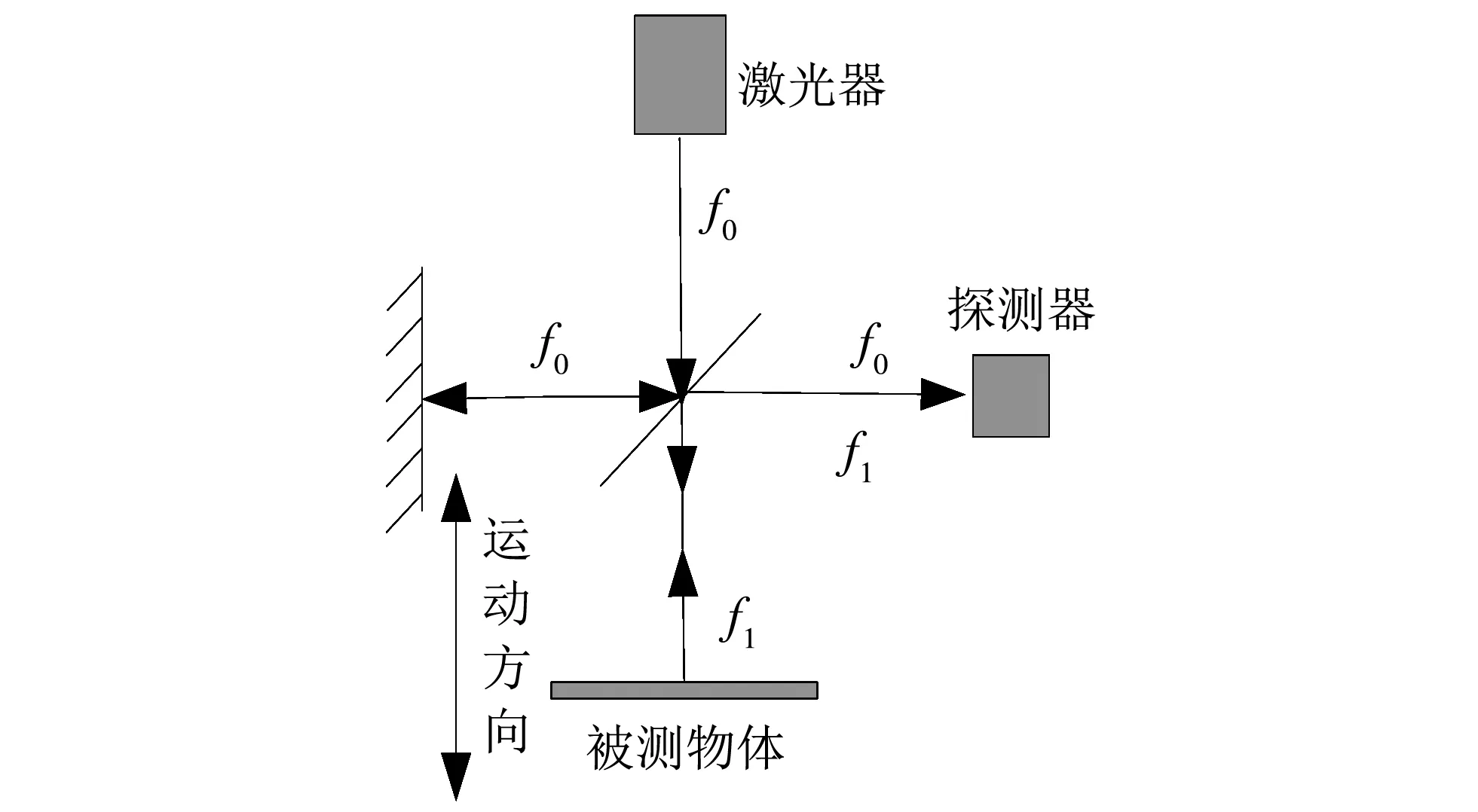
图 4 激光测振仪测试原理Fig.4 Testing principe for laser vibrometer
测试前,在火炮后坐部分端面上粘贴反射薄膜,增加激光反射回探测器中的能量. 激光测振仪架设在火炮正后方,调整激光测振仪架设高度,使发射的激光束聚焦在反射薄膜上且垂直于反射薄膜,通过数据采集器采集激光测振仪输出的后坐位移、 速度等数据,具体测试如图 5 所示.
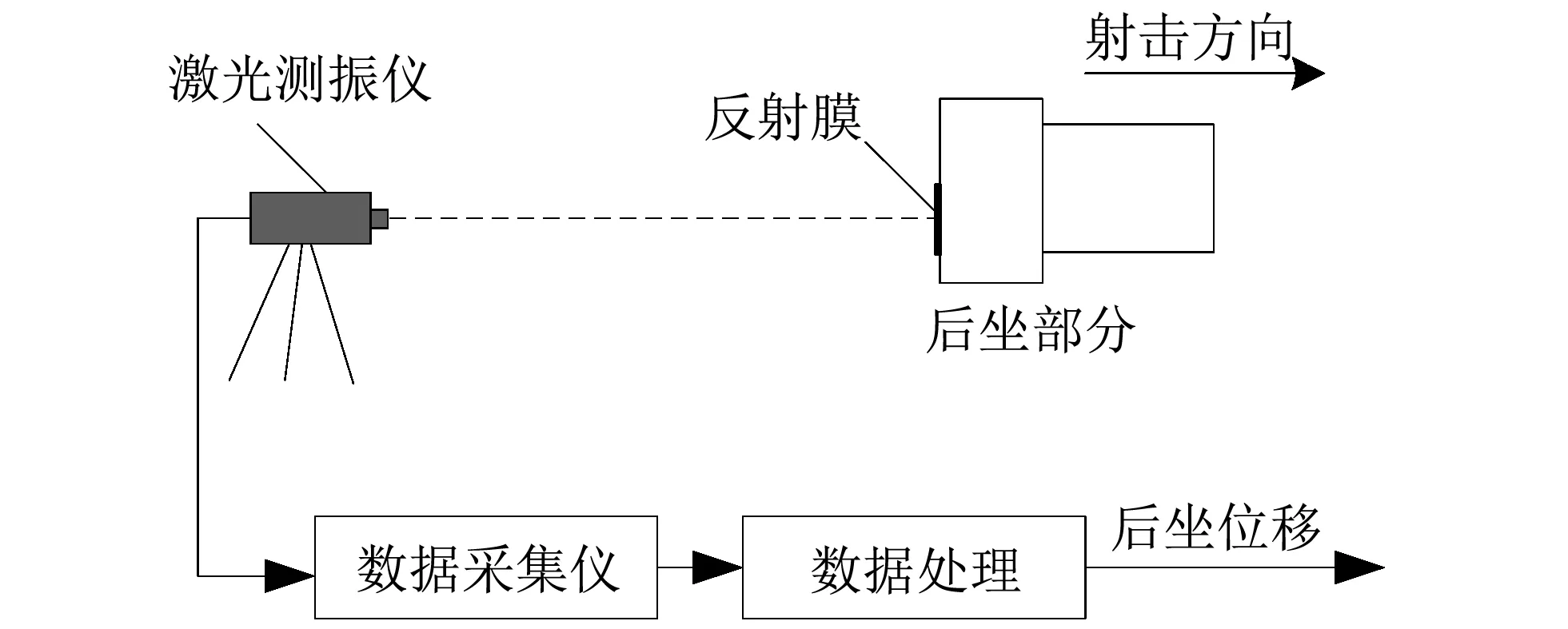
图 5 激光测振仪法测试后坐位移示意图Fig.5 Diagram of recoil displacement test for laser vibrometer
因为激光测振仪法是一种非接触式测试方法,激光测振仪可以布置在远离火炮射击位置,避免火炮发射时冲击、 振动对测试设备和测试结果造成的影响. 激光测振仪的测试误差≤1%,同时不受测量范围的限制,可以满足火炮后坐位移测试要求. 但是该方法属于光学测量法,仪器摆放位置离炮尾较远,发射的激光束容易受自动机泄漏的火光、 烟雾以及光路上的遮挡物所干扰,而且激光测振仪并不是直接测试火炮后坐位移,而是通过测试后坐速度间接得到的,激光测振仪本身对速度源非常敏感,容易受火炮供弹装置运动产生的后坐方向的微小速度干扰,该速度虽然量级小,但是经历时间长,在作积分运算时很容易出现积分误差,导致信号测试精度降低. 对于火炮发射时无供弹等机构动作产生扰动的火炮后坐位移测试,该方法的测试精度和可靠性较高.
此外根据多普勒原理可知,当被测目标的运动方向与激光束的照射方向不平行时,会引入测试误差. 假如激光测振仪照射角度偏差为7°(因为离火炮较远,传感器安装角度较激光CCD法大,一般可控制在7°),后坐位移为25 mm时,激光测振仪摆放位置将造成0.75%的系统误差. 因此在测试时,不仅需要选择合适的测试位置,避免干扰物对其光路的干扰,还要尽量保证目标的运动方向与激光束的照射方向平行,确保后坐位移测试精度.
1.3 高速摄像法
高速摄像法是利用高速摄像机快速拍摄被测物体的运动状态,通过数字图像处理方法获取被测物体的运动参数,包括运动位移、 速度以及加速度等. 其测试原理如图 6 所示,假设高速摄像机经过标定后,d1位移在高速摄像成像面上所占像素为m,物体运动位移经高速摄像记录所占像素个数为n,则运动物体的实际位移为L=n·d1/m[7].

图 6 高速摄像法测试原理Fig.6 Testing principe for high-speed photography
高速摄像测量系统主要由高速摄像机、 光学镜头、 数字图像处理软件、 数据采集系统等部分组成,测试系统组成及具体测试方法如图 7 所示. 高速摄像机架设在火炮侧方,沿射击方向在自动机表面布置高速摄像标志点,通过调整高速摄像机与标志点基本等高位置,对高速摄像机进行标定,消除高速摄像机光轴与测量面不垂直带来的测试误差,提高系统测量精度.
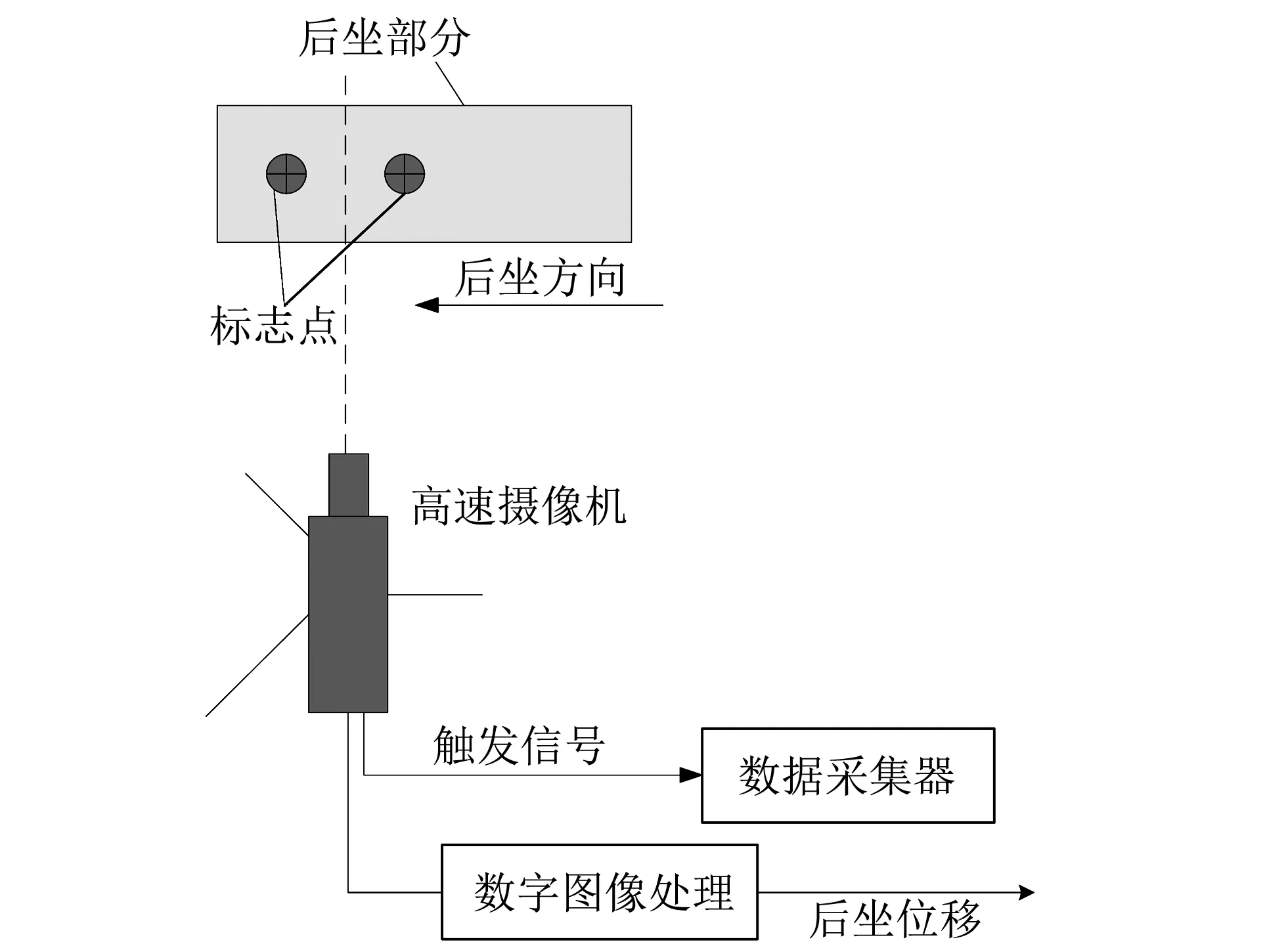
图 7 高速摄像法测试后坐位移示意图Fig.7 Diagram of recoil displacement test for high-speed photography
测试时,利用高精度触发开关触发高速摄像机进行拍摄,通过数据采集器采集触发信号. 假设触发信号在数据采集器的时间坐标系下时刻为t0,后坐最大位移在高速摄像的时间坐标下时刻为t1,则后坐位移最大值在数据采集器的时间坐标系下时刻为t=t0+t1,这样3种测试方法所获取的数据将建立联系.
高速摄像法对光照条件要求较高. 通过研究,在选择合适的镜头、 拍摄距离和良好的光照条件下,高速摄像法的测试精度≤2%,测试范围较大. 高速摄像法因为布设在侧方远离火炮射击位置,更容易受相机视场内的自然光、 火光、 烟雾以及图像成像质量所干扰.
高速摄像法一般对拍摄角度要求不是很严格,因为通过图像标定可以消除拍摄角度对测试结果造成的影响. 高速摄影法对于小口径火炮高射速连发射击的测试误差一般较大,主要是因为火炮发射时产生的冲击振动会通过空气、 地面传播造成测试系统的不稳定,引入测试误差,甚至误差远大于火炮后坐位移量. 但是对于小口径火炮单发射击时,由于后坐时间短,火炮冲击振动并未对测试系统造成影响,高速摄像法还是比较适用的.
2 测试结果与分析
以小口径高炮为试验对象,进行了实弹射击试验,分别采用上述3种方法对火炮自动机后坐位移曲线进行了测试,得到的后坐位移测试曲线如图 8~图 12 所示.
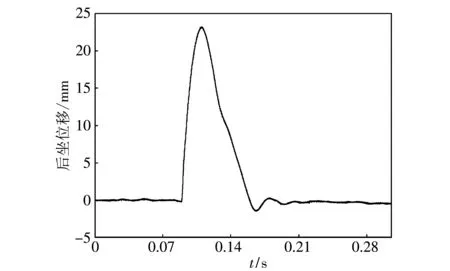
图 8 激光CCD法测试的后坐位移曲线Fig.8 Recoil displacement curve obtained by laser CCD method
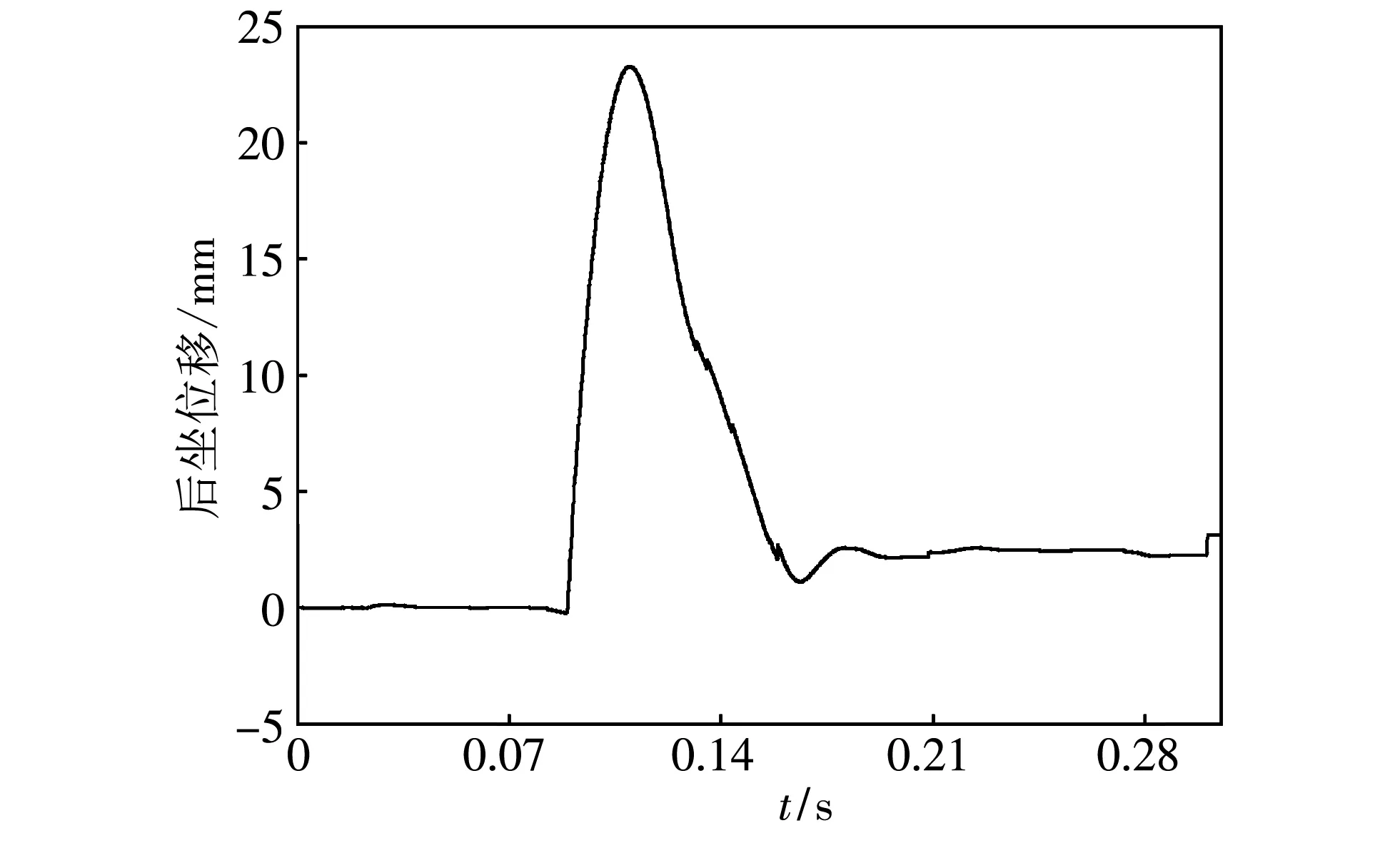
图 9 激光测振仪法测试的后坐位移曲线Fig.9 Recoil displacement curve obtained by laser vibrometer method
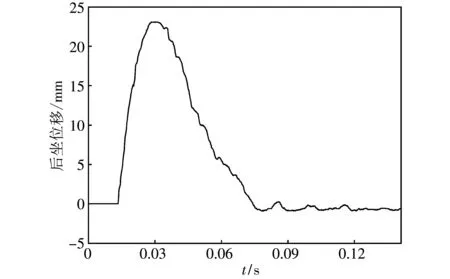
图 10 高速摄像法测试的后坐位移曲线Fig.10 Recoil displacement curve obtained by high-speed photography method
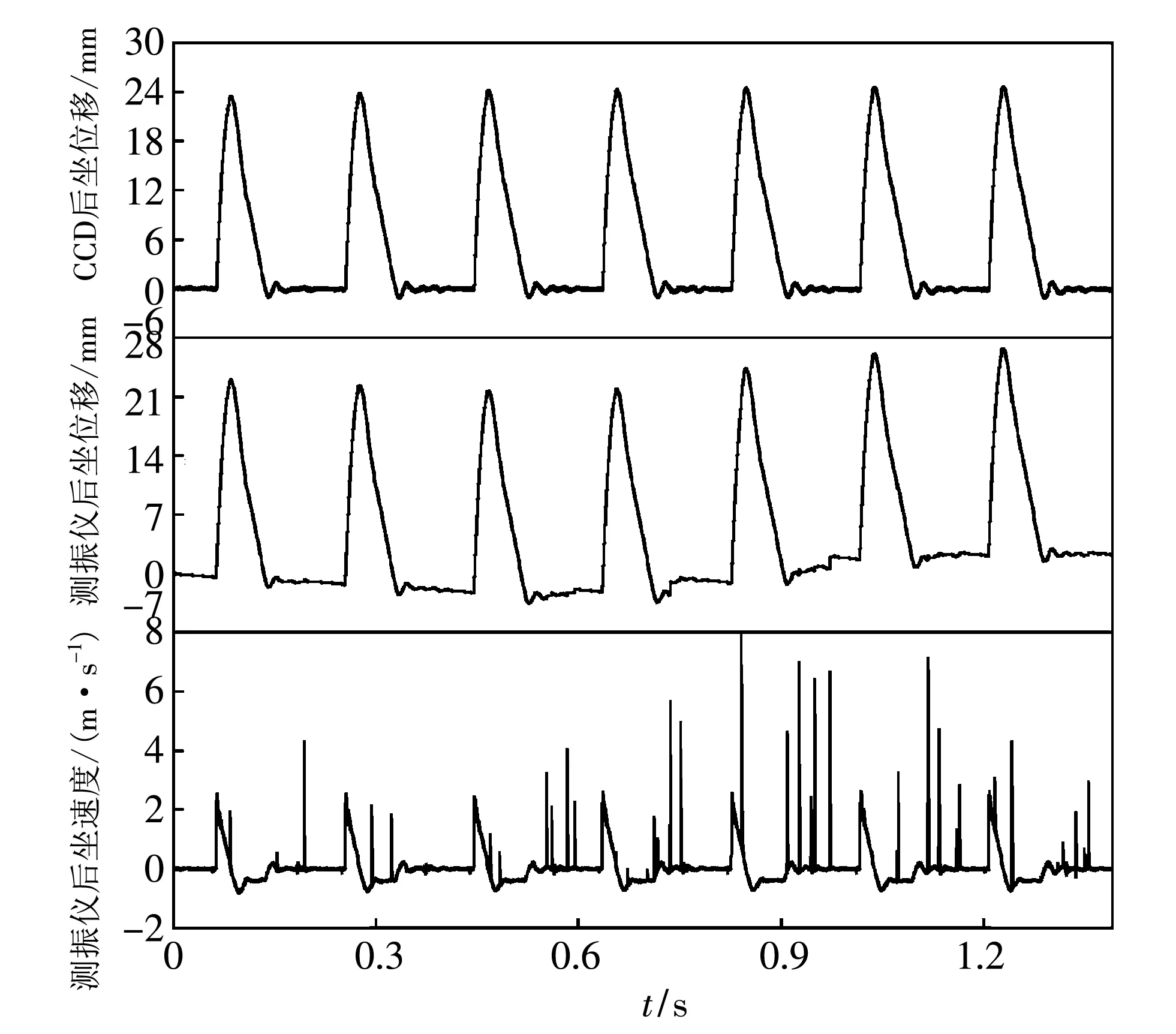
图 11 连发射击时测试的后坐位移曲线Fig.11 Recoil displacement curve obtained by continuous fire
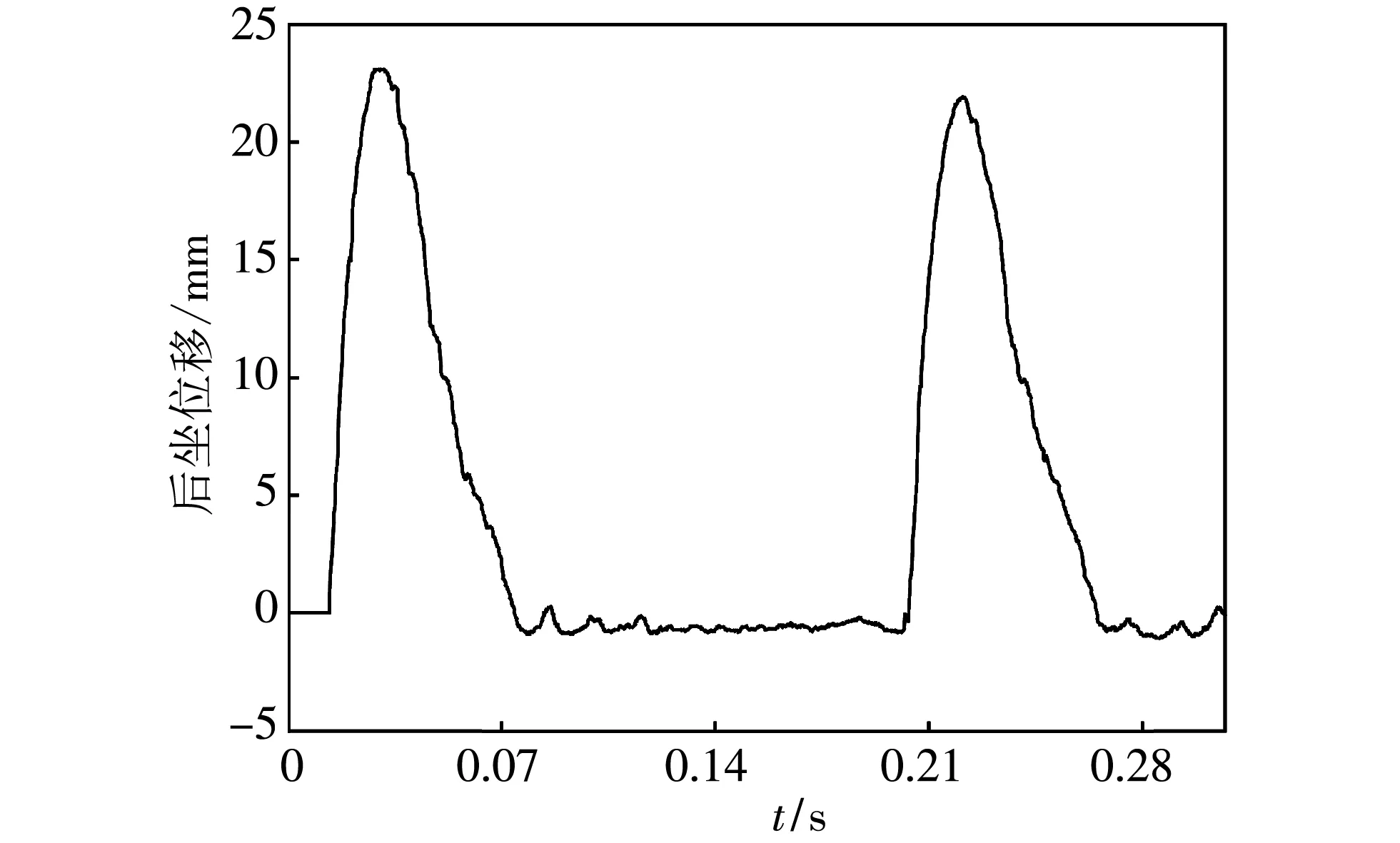
图 12 高速摄像法测试的连发后坐位移Fig.12 Continuous displacement curve obtained by high-speed photography method
将3种方法所测得的最大后坐位移值进行对比,如表 1 所示.
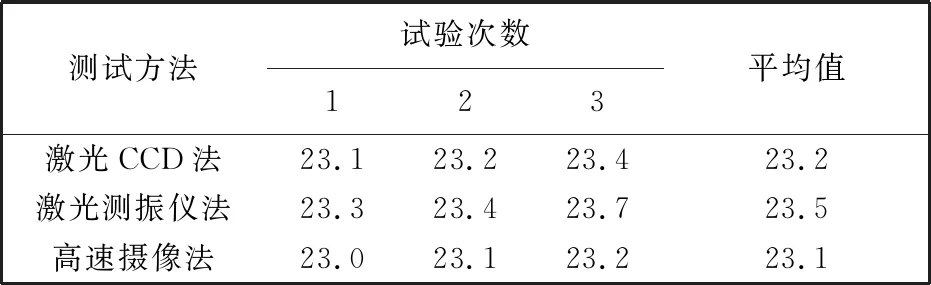
表 1 3种方法最大后坐位移(单发射击)Tab.1 Maximum recoil displacement for three methods(single shot) mm
表 1 所示的3种方法所测后坐位移值的波动,可用极差法[10]进行测量结果标准差的估计. 标准差的估计值根据公式s=R/C得到,其中R为测量结果中最大值与最小值之差,C为极差系数,当n=3时,C≈1.69. 通过计算得出激光CCD法所测后坐位移相对标准偏差最小,约为2.2%.
由以上3种方法的测试原理可知,激光CCD法因为输出的直接量为位移,且不受自然光照条件影响,测试误差最小,所测数据最为准确. 激光测振仪法因受到机构运动速度源的干扰,后坐速度信号中有时混杂尖冲信号,导致因积分得到的后坐位移曲线有明显偏差. 从数据上可以看出,后坐位移开始前和完成后不在同一个零点上,约有0.3~0.6 mm的误差,对于连发射击,该数值会继续增大. 高速摄像法输出的直接量也是位移,但受帧频限制,测试曲线时间精度较低,且每次试验之前需要对相机进行现场标定,测试数据为事后处理,也比较麻烦. 但3种测试方法的测试精度都可以满足测量需求,可以根据现场测试条件,选择相适应的测试方法.
3 结 论
针对小口径火炮后坐位移曲线测试,本文介绍了3种测试方法,得出以下结论:
1) 3种测试方法测试精度都能满足小口径火炮后坐位移测试要求.
2) 激光CCD法测试结果较为理想,该方法不仅适用于火炮单发射击试验,也适用于火炮连发射击试验. 相对于其它两种测试火炮后坐位移的方法,该方法最为可靠.
3) 激光测振仪法得到的后坐位移是间接测量结果,对于火炮发射时无供弹等机构动作产生扰动的火炮后坐位移测试,该方法还是比较可靠的. 另外,在测试精度要求不高的情况下,激光测振仪也可用于火炮连发射击后坐位移测试.
4) 高速摄像法在光照较好的条件下,也能较准确地得到火炮后坐位移. 但与其它两种方法相比,外界环境对测试影响较大,且测试曲线时间精度低. 另外,高速摄像机不能像激光测振仪较大远离振动和冲击源,一般不能测试高射速火炮连发射击后坐位移.
5) 本文结果为火炮测试人员和设计人员在测试小口径火炮后坐位移时,提供了测试方法的选择参考依据,确保测试数据可靠、 可信.
