基于AMESim的旋耕机自动调平系统仿真分析与试验研究
2020-03-15吴帆蒋蘋胡文武金生陈庚
吴帆, 蒋蘋, 胡文武, 金生, 陈庚
(湖南农业大学机电工程学院,长沙 410128)
旋耕机作为一种高效的耕整机具已成为农业现代化的重要部分,旋转式犁耕机具有作业后土体破碎能力强、打破犁底层、提升土壤保水能力、平整地表等功能,同时还可以切碎深埋地表以下的根茬,方便后续播种作业,耕整作业后的土壤为作物发育生长提供了良好的条件[1]。
自动平衡调节系统最早应用于工业等领域,近些年随着传感器的精度不断提高,自动平衡调节系统渐渐被应用于农业机械底盘以及机具的调节[2-4]。现在国内大部分的拖拉机作业机具未装备调平系统,耕整作业后的地表平整度不达标,尤其是农田中存在较多坑洼或斜坡时,拖拉机车体倾斜行进,作业机具与拖拉机相对固定,倾斜作业造成耕整作业后的土地未达到农业生产的水平[5]。此外,为了保证旋耕机机具田间作业的实时平整性,通常采用手动调整左右杆长度来保证其平整性,不仅费时费力,而且会产生危险甚至伤及性命。周浩等[6]基于姿态传感器设计了一种旋耕机实时水平控制系统,根据拖拉机的横滚角驱动电磁阀来调节调平油缸的行程,以保证旋耕机在田间作业时水平。章铁成等[7]设计了一种新型调平油缸活塞杆位置检测传感器,并采用比例换向阀来控制调平油缸的行程,从而控制机具作业时保持水平。但是,对于当前因田间路面连续不平整时电磁阀需频繁调节而造成阀芯损坏,调平响应速度、精度相对不理想,比例阀价格较高不利于大规模应用等问题的研究相对较少。
AMESim平台可分析常规PID与模糊PID两种控制方法对自动调平系统的调平响应时间以及调平精度的变化规律[8-12]。基于此,本研究设计了一种机具自动调平系统,通过田间作业对比有、无自动调平系统作业后土地的耕深稳定性与平整性,分析了作业过程中采集的实时倾角变化规律,验证了仿真控制方法的可行性以及作业效果,提高了调平控制精度、调平响应时间。该研究结果为农业机具调平控制提供了重要依据,能够有效缩短控制响应时间,提升调平响应速度,解决比例阀的价格相对较高、频繁往复调整容易损坏阀芯等问题。
1 材料与方法
1.1 整机结构与原理
旋耕机自动调平控制系统为分置式液压系统,主要包括齿轮泵、溢流阀、阀块、电磁阀、调平油缸、举升油缸、转向油缸、液压转向机、油箱,通过油管互相连通,分别置于拖拉机上。调平结构采用三点悬挂执行机构,倾角传感器安装在上旋耕机的水平面上,通过传输线和控制器连接。旋耕机通过柱销调悬挂在悬臂拉杆一端,连接杆另一端固定在拖拉机尾部,调平油缸替代其中一个调平支撑杆,旋耕机具通过油缸伸缩实现其上下摆动。主要部件分布位置以及车体结构如图1所示。

注:1—油箱;2—齿轮泵;3—电磁阀与阀块;4—电机;5—主控制器;6—电机控制器;7—全液压转向机;8—举升油缸;9—位移传感器;10—调平油缸;11—悬臂拉杆;12—倾角传感器;13—机具。Note: 1—Oil tank; 2—Gear pump; 3—Solenoid valve and valve block; 4—Motor; 5—Main controller; 6—Motor controller; 7—Full hydraulic steering gear; 8—Lifting oil cylinder; 9—Displacement sensor; 10—Leveling oil cylinder; 11—Cantilever rod; 12—Inclination sensor; 13—Implement.图1 整机结构Fig.1 Schematic of the whole machine
旋耕机具具有自动调平[13-14]功能,在田间作业时,旋耕机具上的倾角传感器实时传输数据到控制器,若角度超出预先设定的范围,控制器将发送命令给电机控制器,电机控制器根据其命令控制电机转动相应角度调整液压转向机的进出油量来驱动调平油缸的伸缩对应长度,从而调节旋耕机具与地面的角度。位移传感器实时采集油缸伸出或缩短长度反馈给控制器,控制器根据其数据及结构关系转化为角度值(实际值),判断实际值与目标值的误差,再根据其误差继续控制旋耕机具,达到对机具的闭环控制,保持机具处于预设值。
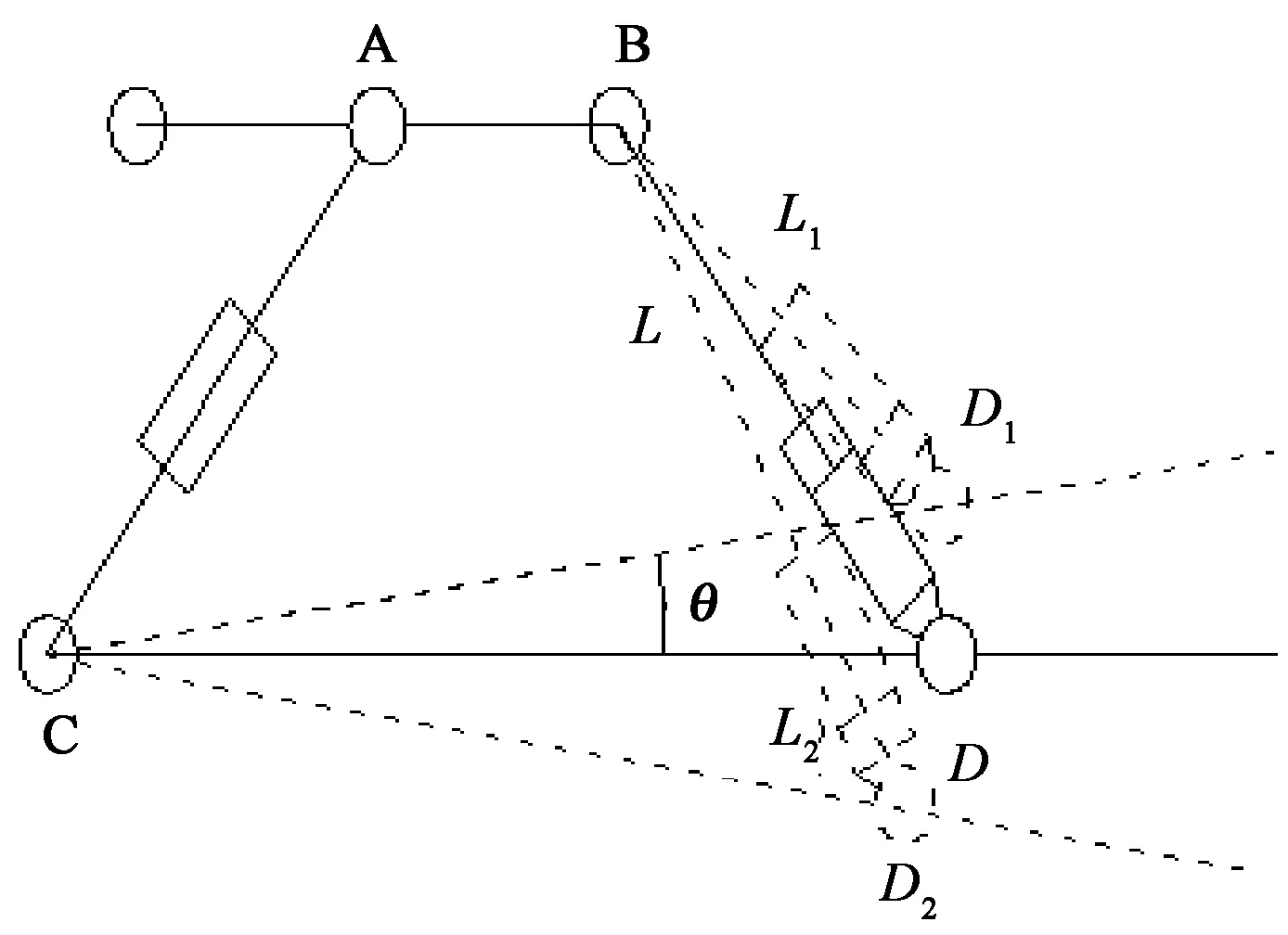
图2 简化调平结构Fig.2 Flattening structure simplified
作业机具调平简化机构原理如图2所示,调平支撑臂固定,调平油缸伸缩运动带动旋耕机调节相对于田地的角度。其中,A、C为调平支撑臂的固定点,B、D为调平油缸化简的摇块,CD1为调平油缸缩短,CD2为调平油缸伸长;θ为旋耕机具相对田地的倾角;L1为调平油缸缩短后长度,L2为调平油缸伸长后长度。调平油缸伸缩量L0(mm)与旋耕机相对田地的倾斜角度θ(°)的关系如下。
(1)
式中,θ为∠D1CD,∠D2CD;CD为两端固定点的长度;L为初始位置调平油缸行程;L0为调平油缸伸长或缩短长度。
1.2 自动调平系统设计
1.2.1液压系统 农业机具自动调平液压系统由齿轮泵、溢流阀、电机、调平模块、举升模块、转向模块、PTO模块等组成,如图3所示。通过对液压系统各部分计算,本系统工作压力为16 MPa。由一个三位四通电磁阀作为总开关,配合电机、液压转向器[15]及调平油缸作为调平油路,一个电动推杆控制手动举升阀作为举升油路,三位四通电磁阀控制一个30 mm行程的小油缸作为PTO控制模块,三位四通电磁阀控制SJ-JZXG转向油缸作为转向油路,并通过小型液压站单独供油,保证其不受其他油路干扰,使拖拉机能够正常行驶、转向。

图3 液压系统Fig.3 Hydraulic system
1.2.2调平系统硬件设计 控制系统主要包括自主研制的主控制器、电机驱动板、六轴倾角传感器等,如图4所示。其中主控制器的主控芯片为宏晶科技公司的STC8A8K64S4A12,扩展了16通道的开关量控制、8通道的A/D和D/A功能、无线通信以及232、485通信功能;电机控制板的主控芯片与主控制器相同,并扩展了8通道的PWM控制与232、485通信功能;倾角传感器的主控芯片为宏晶科技公司的STC15W4K48S4,倾角芯片为WT901C,扩展了485通信功能。倾角传感器和电机驱动板使用RS485串口与主控制器通信,波特率115 200 kps。
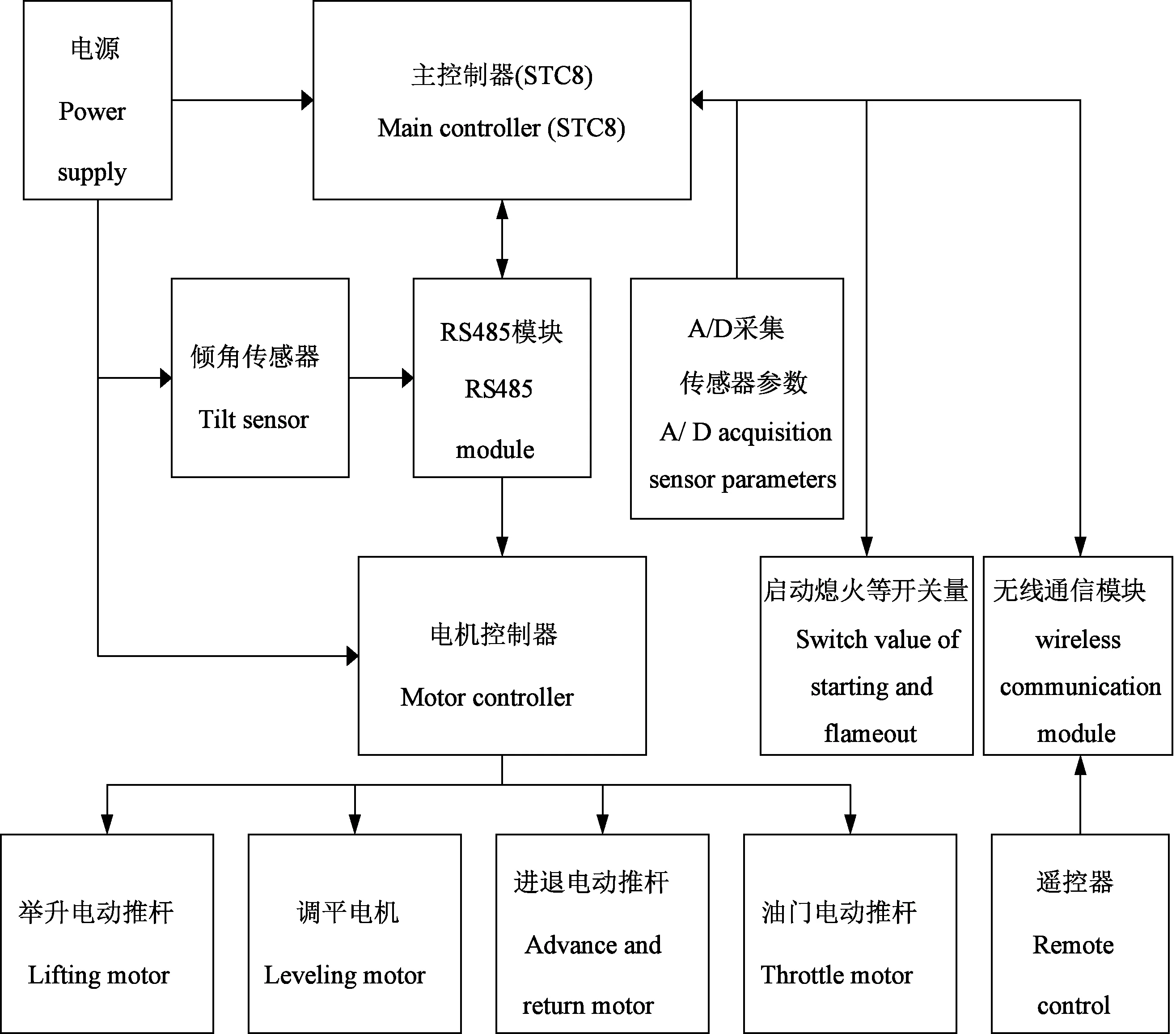
图4 调平控制系统Fig.4 Leveling control system
1.2.3调平系统软件设计 系统预设作业机具水平角度为零,使用倾角传感器检测机具实时角度,以位移传感器转化后角度作为反馈信号,通过模糊PID算法控制电机的转速,实时调节全液压转向器的进出油量,从而调整油缸的行程,达到机具水平的目的,其闭环控制系统如图5所示。

图5 闭环控制系统Fig.5 Closed loop control system
由于车身与机具悬挂结构有较小摆动,因此,当机具倾角在±0.75 °以内,不对机具进行调平;当机具倾角超出±0.75 °时,对机具进行调平。
1.2.4模糊PID控制器设计 模糊控制器采用双输入三输出的形式,通过倾角传感器的角度偏差e和偏差变化率ec为模糊参数输入,kp、ki、kd为控制器的输出。在输入语言变量的论域内分别用{NB,NM,NS,ZO,PS,PM,PB}表示,即{负大,负中,负小,零,正小,正中,正大}。系统输入误差e和误差变化率ec和输出的kp、ki、kd大小都量化为7个等级,论域为{-3,-2,1,0,1,2,3},采用三角形隶属度函数。模糊PID控制器原理如图6所示。

图6 模糊PID控制器原理Fig.6 Fuzzy PID controller schematic
(2)
式中,u(k)为系统输出;e(k)为系统输入偏差信号;kp为比例系数;Ti为积分时间常数;Td为微分时间常数。
PID控制算法的三个重要系数分别是比例系数(kp)、积分作用系数(ki)、微分作用系数(kd)。kp越大,系统响应速度越快,精度越高,但是容易产生超调。kp越小,系统响应速度较慢,精度越低,调节时间越长。ki能够消除系统的稳态误差,ki越大,误差消除越迅速,但ki过大,由于系统响应开始时出现积分饱和现象,易引起系统超调,若ki过小,静态误差无法消除。kd能够提高系统的动态性能,在响应过程中能抑制偏差增大。根据PID控制参数的特点设计如表1所示的模糊控制规则表[12,16]。
参数的控制规则表建好后,根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计PID参数的模糊矩阵表,查出修正参数,并代入下式即可得出kp、ki、kd的值。其在线自校正工作流程如图7所示。
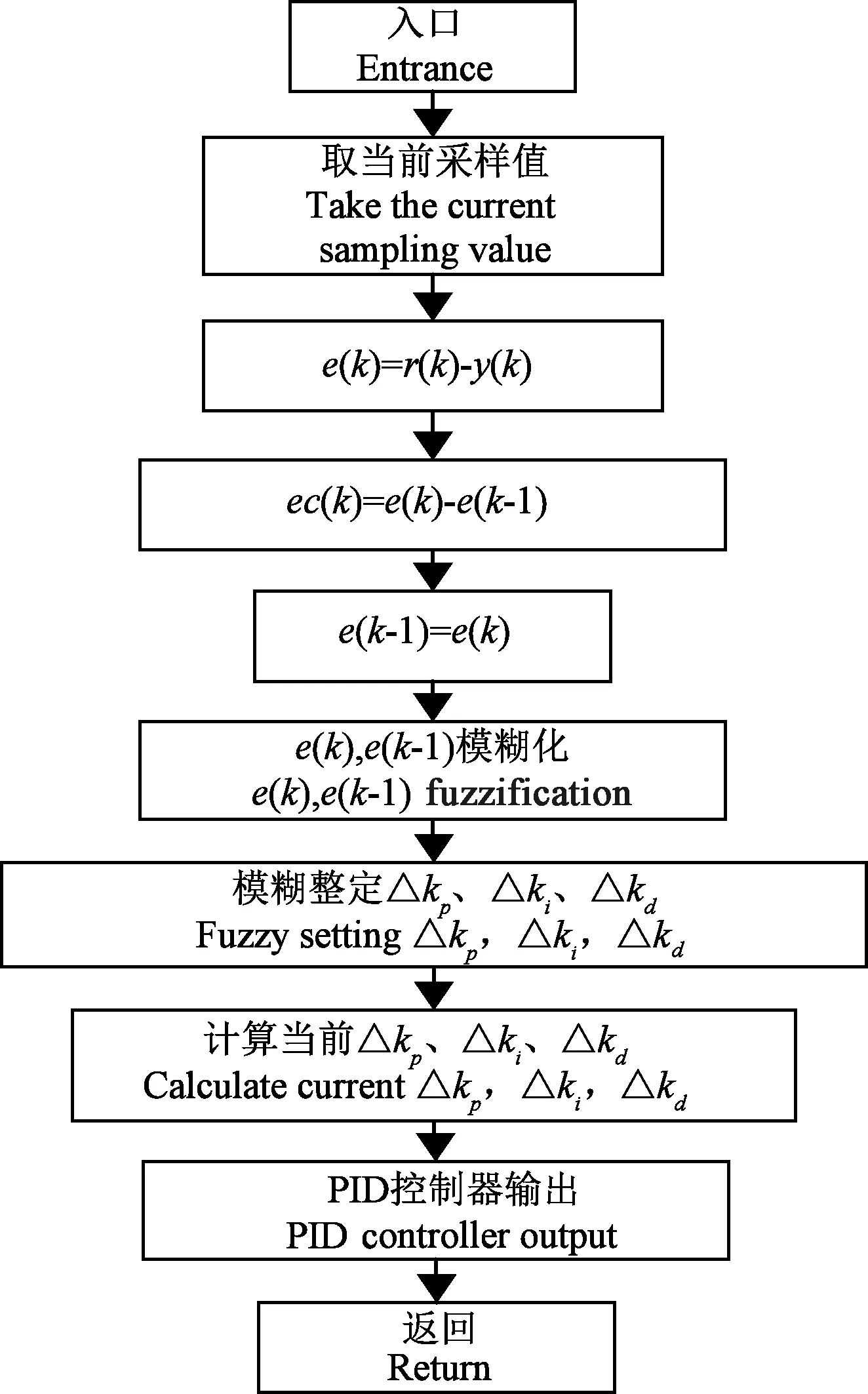
图7 在线自校正工作流程Fig.7 Online self-correction work flow
kp(k)=kp(k-1)+{ep,ecp}
(3)
ki(k)=ki(k-1)+{ei,eci}
(4)
kd(k)=kd(k-1)+{ed,ecd}
(5)
式中, {ei,eci}p、{ei,eci}i、{ei,eci}d是经模糊推理后的参数校正量。
1.3 AMEsim仿真
1.3.1硬件设计 如图8所示,在AMEsim软件中选择元件库中相应功能的构件连接,按照步骤构建调平系统仿真模型[17-18]。

注:1—液压泵;2—电机;3—溢流阀;4—信号源;5—溢流块;6—位移信号;7—溢流或转向选择块;8—供油块;9—转向块;10—模拟定量转子泵;11—位移传感器;12—调平油缸;13—质量块;14—弹簧减震器;15—模糊pid模块。Note: 1—Hydraulic pump; 2—Motor; 3—Overflow valve; 4—Signal source; 5—Overflow block; 6—Displacement signal; 7—Overflow or steering selection block; 8—Oil supply block; 9—Steering block; 10—Analog quantitative rotor pump; 11—Displacement sensor; 12—Leveling oil cylinder; 13—Mass block; 14—Spring damper; 15—Fuzzy PID module.图8 AMESim仿真模型Fig.8 AMESim simulation model
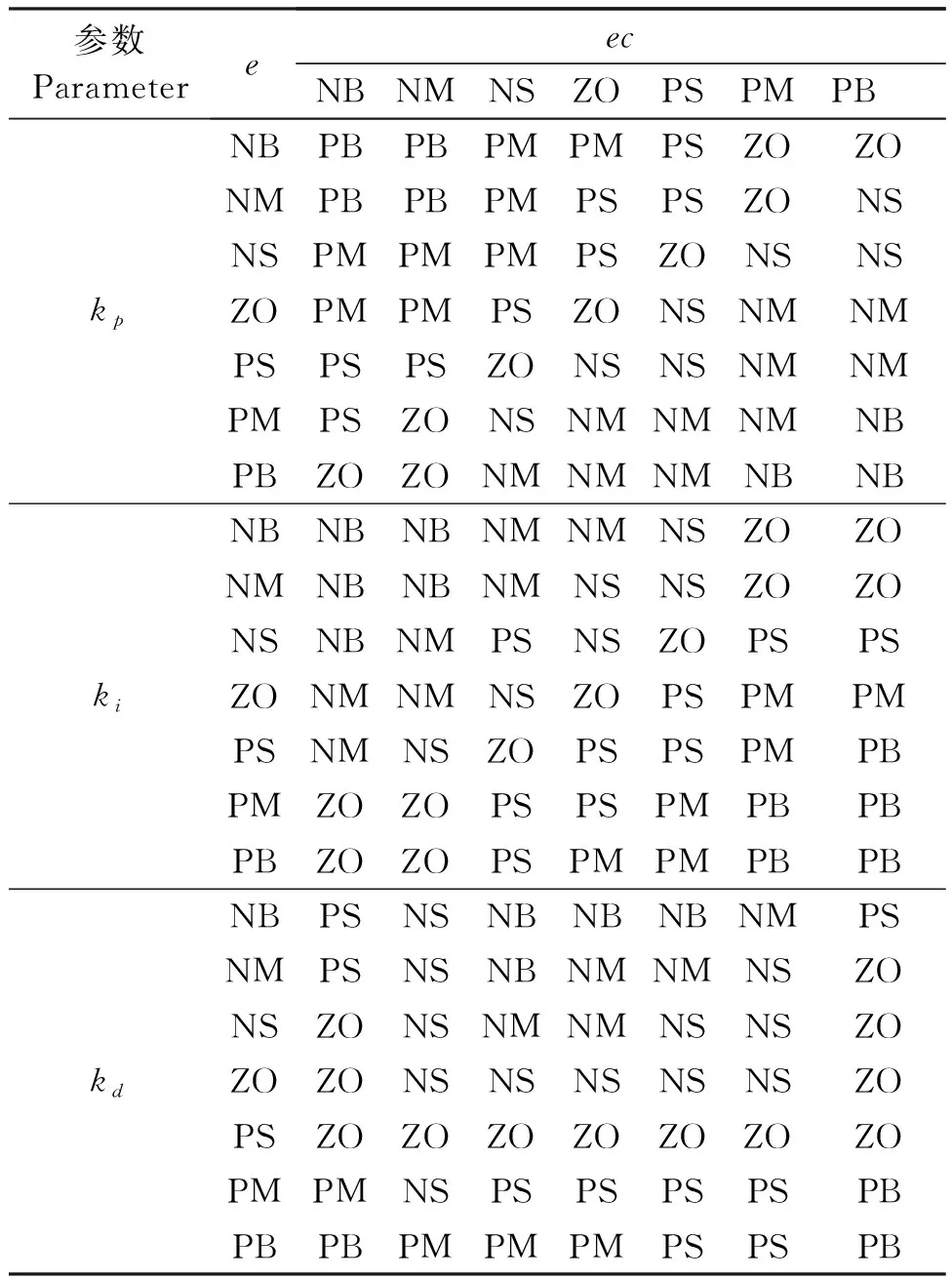
表1 PID模糊参数控制规则Table 1 PID parameter fuzzy control rule
1.3.2仿真模型的参数设置 在参数设置模式下,依据设计参数:液压泵1的转速2 000 r·min-1,排量6.3 cc·r-1;电机2额定转速2 400r·min-1;溢流阀3的溢流压力180 bar,阀门额定电流400 mA;信号源4为1阶段,起始到结束都为400;调平油缸12行程s=100 mm,活塞的初始位移为50 mm处,活塞直径d=25 mm,活塞杆直径d=12 mm;质量块13的质量为150 kg,上位移限制50 mm,下位移限制50 mm;模拟阀块的孔径为2.5 mm,液压转向机在中间位置时,向左右各旋转2.5圈时,达到极限位置,即打1圈时对应杆移动1 mm;通过试凑法,确定PID控制参数为kp=1.2、ki=0.03、kd=0.01,初始模糊PID控制参数为kp=0.9、ki=0.01、kd=0.02。
1.3.3精度分析 预设液压缸初始位置50 mm处,将其调至到75 mm处,对常规PID与模糊PID两种控制方法进行仿真。将75 mA的阶跃信号分别输入控制系统,仿真时间设置为5 s,测定其油缸行程变化。为了分析两种控制方法需要连续调节下的性能,在其达到稳定的状况下(1 s内),输入40 mA的阶跃信号进行仿真。
1.4 田间试验
试验于2019年9月20日在湖南农业大学耘园实验中心进行,田地为未经平整处理的南方烟田,长50 m,宽20 m。试验车辆为1GDZ-150型履带式拖拉机,试验机具旋耕机整机质量为300 kg,试验平均作业速度为0.45 m·s-1。采用两台自主研制水平度传感器(模块为WT901C)检测车身和旋耕机具的倾斜角度,其静态测量平均值误差在±0.01°左右,开启旋耕刀有一定振荡后,最大误差不超过0.3°。通过自制遥控器(无线模块为RFM96)与自制控制器进行通讯,实现遥控直线行走、转向、旋耕机整体举升等操作,便于田间试验。此外,还有激光测距仪、水平尺、卷尺、秒表、电脑等设备或工具。
田间作业分为6个行程,其中行程1~3为无自动调平控制系统(行程3为遥控手动调平控制),行程4~6为有自动调平控制系统(模糊PID算法),分别采集每个行程20 m作业过程中的实时车身倾角和机具倾角数据。沿着拖拉机作业行进方向,每隔2 m,在其左、中、右三点各用耕深尺测量每处的耕深,每个行程测量10组。沿着拖拉机作业垂直方向,在地表最高点上选择一点做水平基准线,在基准线上取机具耕宽长度,均分为10分,测出各等分点至地表距离,每个行程测定一点。
以机具作业后耕深稳定性(≥85%)以及地表平整度(≤5 cm)2个指标评价自动调平控制系统和无自动调平控制系统的旋耕机田间作业效果[19-20]。
2 结果与分析
2.1 AMESim仿真分析
2.1.1响应时间与精度分析 调平油缸作用在机具上的位移情况如图9所示。可以看出,初始时间下两种控制方法的调平油缸没有位移,在0.19 s时,调平油缸才开始动作,说明系统各个连接处建压都有过程,转向器开启需要时间以及转向器存在死区,最终反映到调平油缸上。常规PID算法超调量较为明显,调平时间超过2 s,有一定振荡和滞后性,而模糊PID算法响应迅速、精度高,基本不超调,调平时间相比也缩短了1 s,系统性能有一定提升。
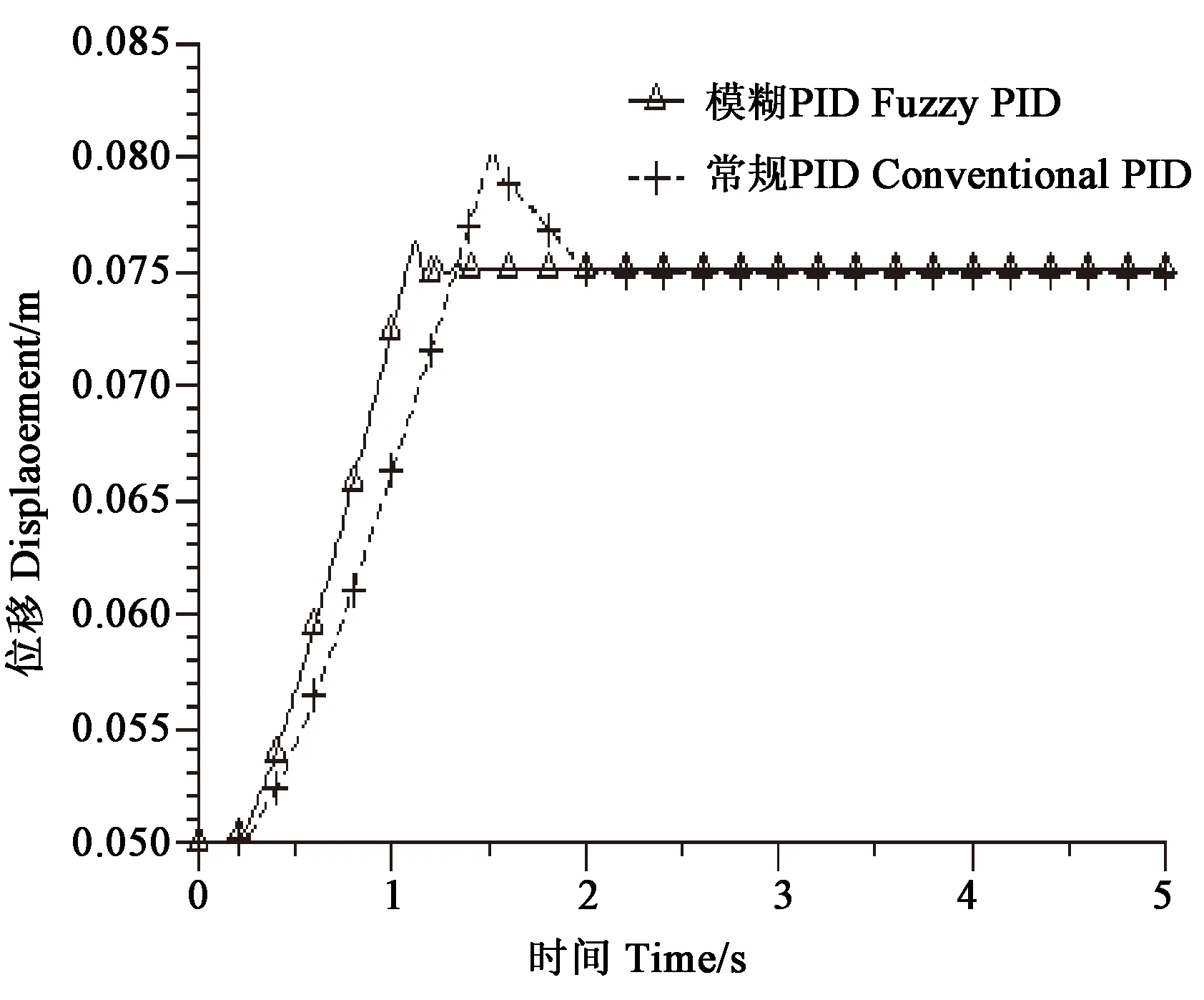
图9 油缸位移Fig.9 Cylinder displacement
2.1.2连续响应时间与精度分析 从图10可以看出,常规PID算法超调非常明显,且连续调平稳定时间超过2 s,整体调节时间较长,达不到系统所需要求,而模糊PID算法响应时间为1 s左右,基本不超调,到达目标时间、且稳定时间明显更短。因此,模糊PID控制的连续调节性能明显优于PID控制算法。

图10 油缸位移Fig.10 Cylinder displacement
仿真结果表明,本研究中模糊PID算法的油缸行程控制精度在±2.5 mm以内,即倾角为 ±1.6° 以内,可以达到旋耕机具连续调平的实时性与控制精度的要求。该算法超调量小、响应迅速、精度高、连续调节性能高,明显优于常规PID算法。
2.2 机具作业效果分析
机具在田间作业后,分别采集行程1~3与4~6的测点数据,对耕深、平整度及倾角变化进行比较分析。
2.2.1耕深 通过分析(表4)可知,无自动调平控制系统的左、中、右耕深相差较大,高度差最大为9.4 cm,耕深平均值相比自动调平控制系统的耕深平均值要小,均方根误差≤4.71 cm。而自动调平控制系统的左、中、右耕深相差小,高度差最大为2.3 cm,均方根误差≤0.96 cm,且平均耕深稳定性系数为94.7%,相比无自动调平控制系统的平均耕深稳定性系数81%要高13.7%,说明自动调平系统能有效的提高耕深稳定性。
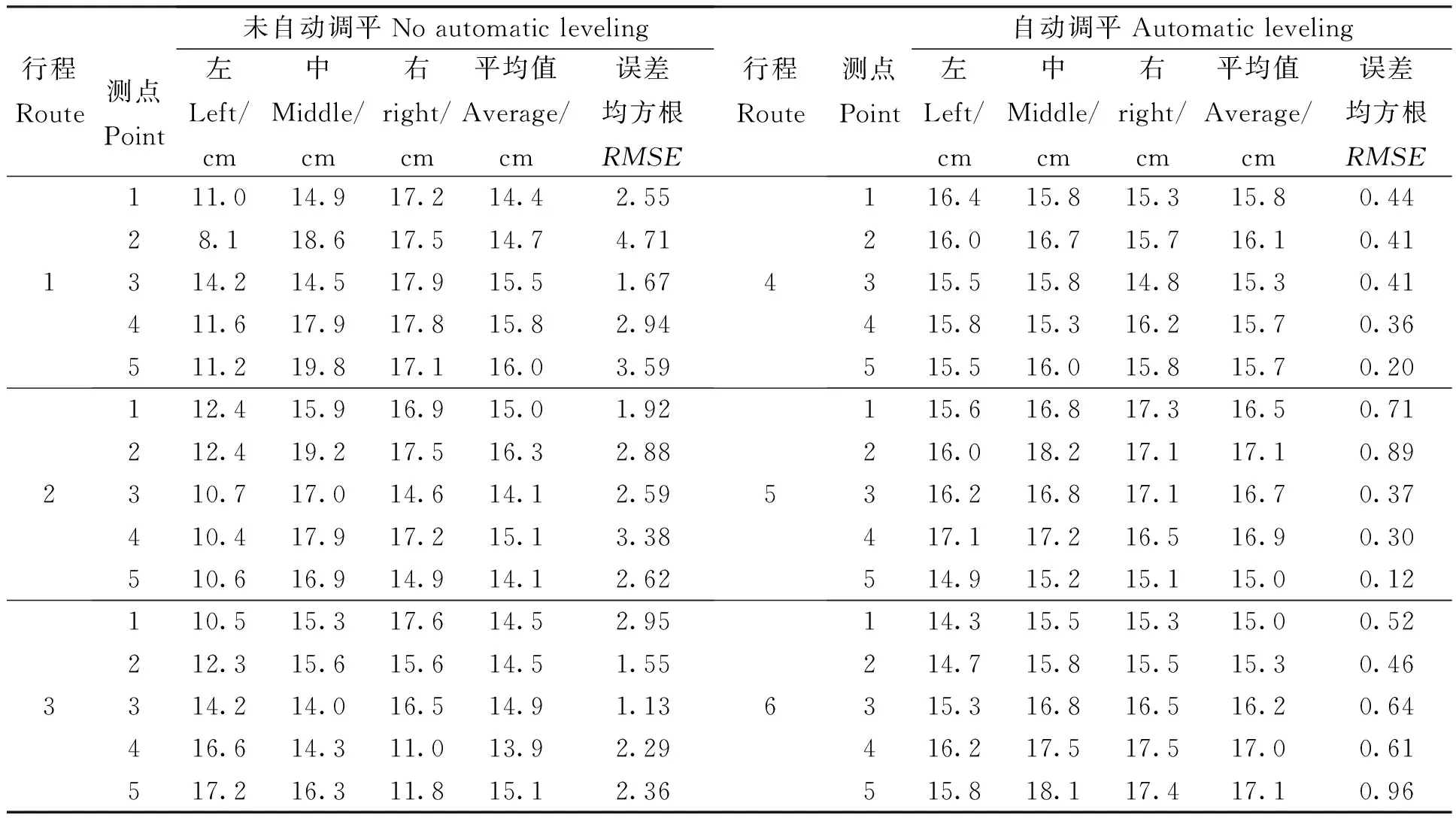
表4 耕深分析Table 4 Analysis of tillage depth
2.2.2平整度 通过表5数据比较可知,无自动调平控制系统在作业之后,各等分点至地表距离最大相差26 cm,均方根误差≤8.42 cm,平整度≤2.8 cm。而自动调平控制系统作业之后的各等分点至地表距离最大相差11 cm,均方根误差≤3.24 cm,平整度≤1.08 cm。由此可得,装有自动调平系统的拖拉机作业结果优于无自动调平系统。

表5 平整度分析Table 5 Analysis of flatness
2.2.3倾角变化规律 田间作业过程中,分别采集了6个行程的车体与作业机具倾角实时变化数据,其中4个行程的倾角数据如图11所示。通过比较图中曲线可知,无调平控制模式下,车体倾角与作业机具倾角变化规律大致相同,车体倾斜角度较大时,机具倾角角度也随之变大。遥控手动调平控制模式下,对人工操作与视野范围要求较高,难以有效地实时控制机具倾斜角度。自动调平控制模式下,作业机具的倾斜角度变化范围基本处于-1~1°,其误差均方根分别为0.53°、0.73°、0.75°。因此,装有自动调平系统的拖拉机田间作业质量明显好于无自动调平系统。相比仿真实验结果,油缸行程的控制精度在±2.5 mm以内,即倾角为±1.6°以内,田间试验结果基本与其相符。
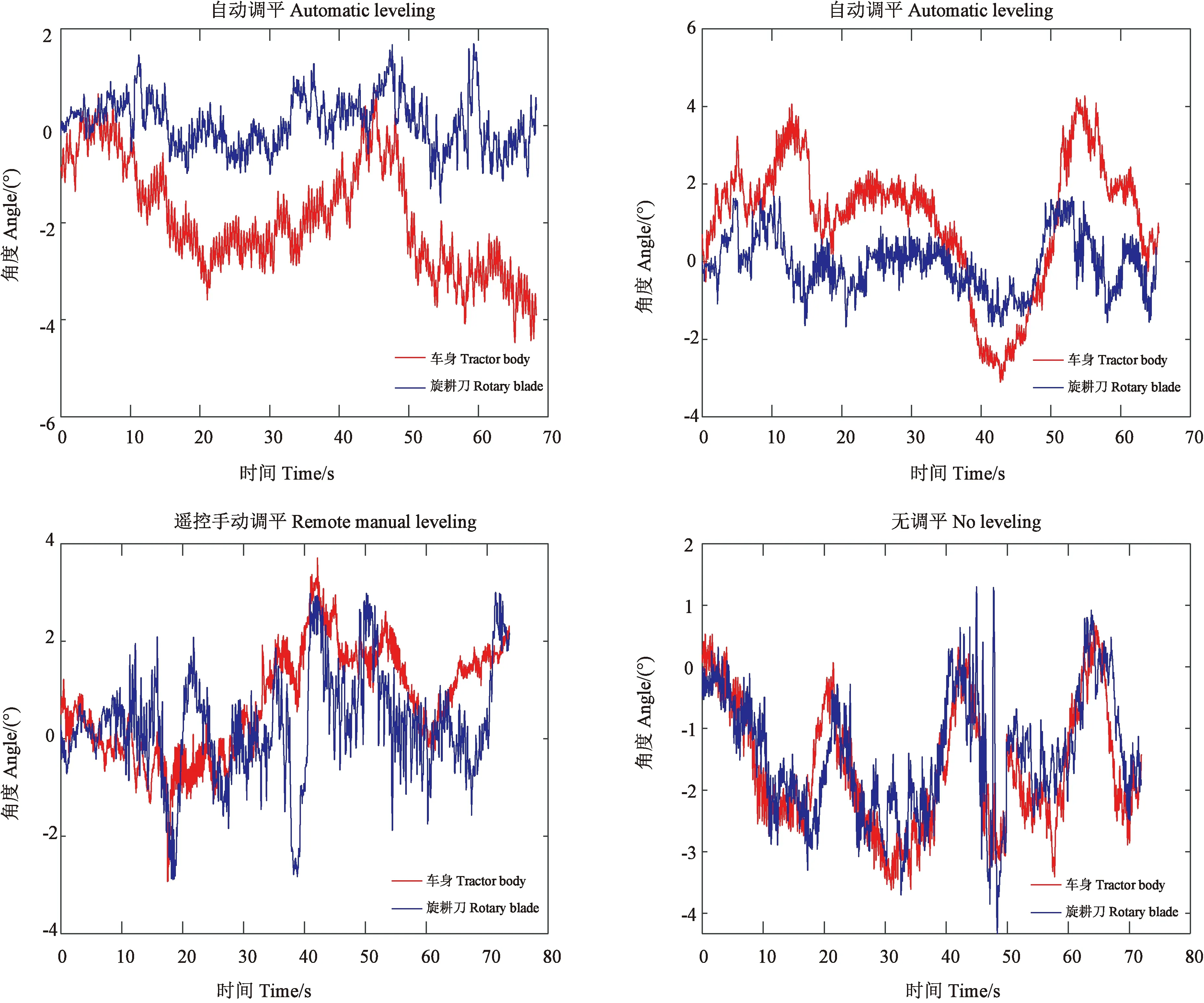
图11 实时倾角数据变化Fig.11 Real-time dip data change
3 讨论
目前我国农业机具无自动调平功能或绝大数采用比例阀或换向阀控制油缸的方式,但存在比例阀成本相对较高,频繁地调节电磁阀易造成阀芯损坏,控制策略的响应速度、响应精度不高等问题。本研究采用电机控制全液压转向机调节油缸的方法,可在短时间内频繁调节油缸的伸缩量,避免了阀芯损坏这一问题,且降低了材料成本。
模糊PID算法的优劣关键在于其参数的自整定,旋耕机具调平系统调平过程比较繁琐,具有非线性、滞后性与时变性的特性,因此难以构建准确的数学模型对其系统进行控制。所以,通过基于模糊集合论、模糊逻辑推理与模糊语言变量的控制方法进行PID参数在线自整定,以满足不同误差与误差变化率对控制参数不同的要求,使控制器有良好的自适应性,同时计算量较小,单片机便于实现[16,21-23]。本研究通过AMESim软件分别研究了常规PID与模糊PID的响应时间与精度、连续响应时间与精度,得出模糊PID算法超调量小、响应迅速、精度高、连续调节性能高,能够达到旋耕机具连续调平的实时性与控制精度的要求,为实际生产中提供了一定依据。
田间作业中,自动调平控制系统的左、中、右耕深相差小,高度差最大为2.3 cm,其耕深平均值相比无自动调平控制系统的耕深平均值要大,且平均耕深稳定性系数为94.7%。自动调平控制系统作业之后的各等分点至地表距离最大相差11 cm,平整度≤1.08 cm。通过AMESim仿真与田间试验验证,满足旋耕机械作业效果的要求[19]。因此,本研究设计的旋耕机自动调平是可行的。
田间作业中环境影响因素较多,土壤坚实度不同对反馈回旋耕机的力也不同,后续有待进一步根据反馈力的不同,调节相应的土壤整体耕深,防止驱动功率过大,保护电机控制器的使用寿命;进一步提升调平响应时间、调平精度;同时,双调平油缸结构在农业机具调平中的应用仍需进一步研究。
