氢燃料电池混合动力汽车能量管理系统建模与仿真分析
2020-03-14郭朋彦宗贺辉王一博李冰洁
郭朋彦 ,宗贺辉,王一博,李冰洁
(华北水利水电大学机械学院,河南 郑州 450045)
随着环境污染、温室效应与能源短缺的加剧[1],氢气作为清洁无污染燃料受到了越来越多的关注。氢燃料电池是通过电化学作用直接将化学能转变为电能,被认为是继火电、水电、核电后的第4种发电方式,其发电效率不受卡诺循环的限制,是一种高效、清洁的新型电源[2]。氢燃料电池汽车具有清洁无污染、能量利用率高、燃料加注快捷等优点,成为新能源汽车发展的热点。然而,燃料电池具有动态响应慢、启动时间长、输出特性偏软等缺点,所以需要耦合辅助能源来为车辆在爬坡和加速等高功率需求阶段提供功率支持[3]。燃料电池汽车整车能量管理系统是燃料电池汽车的重要核心技术,其核心功能是实现对动力系统的扭矩管理和对混合动力系统的功率实时分配,以确保整车在安全前提下的功率需求,满足车辆动力性和经济性要求[4]。
1 燃料电池动力电池混合动力系统
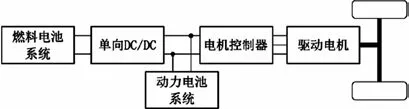
图1 燃料电池与动力电池混合驱动系统
燃料电池与动力电池混合系统是一种“FC+B”的驱动模式,指燃料电池作为主要能源,动力电池作为辅助能源的驱动模式。图1所示为燃料电池和动力电池并联的混合动力结构,该混合动力结构中,燃料电池通过一个单向DC/DC变换器稳压后接入母线,而动力电池因为电压和母线电压相符,直接并入母线[5]。此种混合模式结构较为简单,可有效覆盖需求功率的波动,降低对燃料电池的功率需求,并提高动力电池的响应速度,可有效弥补燃料电池和动力电池各自缺点,目前应用最为广泛[6]。
2 整车能量管理系统设计与建模
FCHV能量管理系统旨在准确判断驾驶员意图,计算出需求功率并将两个电源的功率按一定规则进行分配,最终将参考转矩信号T_motor_ref输出至电机控制器,燃料电池参考电流信号I_FC_ref输出至燃料电池系统,动力电池充放电功率P_bat输出至动力电池系统。
本文采取分块化建模的思想,所建立的能量管理系统框图如图2所示,包含驾驶员意图模块、燃料电池参考电流计算模块、动力电池充电需求功率模块、动力电池能量管理模块和电机转矩修正模块等。

图2 能量管理系统框图
2.1 驾驶员意图模块
由于车辆的行驶状况非常复杂,对驾驶员意图的精准判断在车辆行驶控制中至关重要,通过对驾驶意图的判断,可以初步得到驾驶过程的转矩需求T_dem和功率需求P_dem。驾驶员意图模块如图3所示,该模块将车速信号V、加速踏板信号Acc和制动踏板信号brk作为输入,需求转矩由这3个信号共同决定。踏板位置信号范围都在0到1之间,当制动踏板信号不为0,说明驾驶员有制动意图,则加速踏板信号被屏蔽。首先根据加速踏板信号和制动踏板信号判断驾驶员的意图θ,之后由θ和车速共同来决定电机的载荷系数C_load,载荷系数离散值如表1所示,载荷系数和电机需求转矩的关系如式 (1)所示。

式中:Tu——电机基本需求转矩;TN——电机额定转矩。

图3 驾驶员意图模块

表1 载荷系数离散值
2.2 动力电池充电管理模块
动力电池在燃料电池混合动力汽车中起到辅助能源的作用,考虑到动力电池寿命和安全性,需要让动力电池维持在合适的荷电状态 (SOC)范围。本文中对动力电池的荷电状态进行判断,当低于40%时,动力电池进入充电模式,开始持续充电,直到SOC超过90%时动力电池终止充电,进入放电状态。控制策略模块如图4所示。
2.3 燃料电池需求电流模块
动力系统对燃料电池的功率需求是驾驶员意图的功率需求P_dem和动力电池充电需求P_bat_recharge两者之和,再根据燃料电池放电电流和燃料电池功率之间的关系,计算出燃料电池的电流需求FC_current_ref。燃料电池放电电流和功率之间的关系如图5所示。
2.4 动力电池能量管理模块
动力电池在整个车辆行驶过程中主要用来弥补燃料电池功率不足时所需要的功率,计算动力电池的功率首先要计算当前燃料电池的实际输出功率P_FC_actu,燃料电池总需求功率P_FC_dem和燃料电池实际功率的差值即为动力电池所需功率,当车辆制动时,动力电池为充电状态,可以吸收储存能量[7]。当动力电池放电电压过高时,为防止放电功率过大,损伤电池,需要对动力电池充放电过程进行功率限制。动力电池能量管理模块如图6所示。
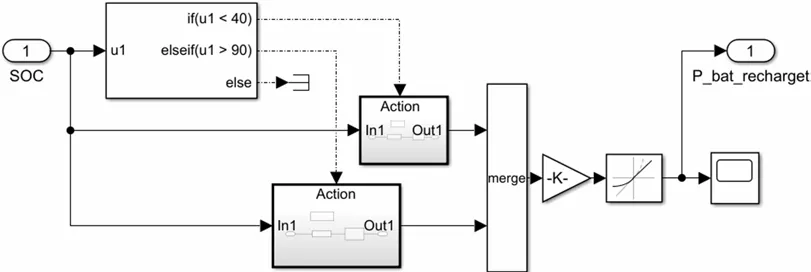
图4 动力电池充电管理控制策略

图5 燃料电池放电电流与功率关系
2.5 电机转矩修正模块
该模块根据燃料电池和动力电池的实际状态,结合电机当前实际转速重新修正电机的需求转矩,当电机转速高于某一定值时,输出燃料电池和动力电池实际放电可以产生的功率,避免发生过度放电现象;当电机转速低于某一定值时,输出T_dem。电机转矩修正模块如图7所示。
3 仿真及结果分析
本文在Matlab/Simulink环境下建立燃料电池混合动力汽车仿真模型,并加入该能量管理控制系统进行仿真模拟,以测试控制策略的正确性及对燃料电池汽车动力性、经济性的影响。本文以加速踏板和制动踏板信号作为输入,代表驾驶员对车辆的纵向操作,在0~5s起步阶段,加速信号为60%,5~10s内,释放踏板,加速信号为40%;10~15s内,再次踩下踏板,加速信号为80%;15~20s内,加速信号为70%;并且,在8~9s内踩下制动踏板,加速踏板信号被屏蔽,制动信号为60%,16~20s内加入制动信号80%,模拟了两次制动过程。该驾驶员意图信号模拟了一个完整周期FCHV的不同运行模式:起步、缓加速、减速、急加速、为电池充电和再生制动。

图6 动力电池能量管理模型
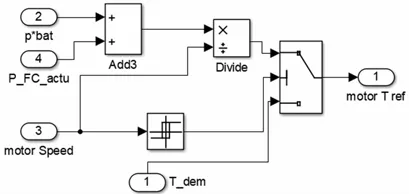
图7 电机需求转矩修正模块
如图8和图9所示为汽车在20s内车速和功率的变化情况,0~0.83s内,驾驶员踩下加速踏板,至最大加速度的60%,此时,只有动力电池为总线供电,起动功率完全由动力电池提供。在0.83s后,燃料电池开始提供功率。但由于燃料电池输出的滞后性,无法及时提供足够的功率,因此由动力电池提供不足的功率。在5s处,加速信号变为40%,车辆所需的功率突然减小,但是燃料电池仍然输出较大功率,此时,动力电池作为吸能装置吸收过剩功率。8~9s处,驾驶员有减速意图,燃料电池过剩功率结合再生制动功率为动力电池充电,此时动力电池为充电状态。10s后加速信号升至80%,需求功率增大,动力电池继续提供不足功率,至燃料电池满足动力需求逐渐停止。

图8 速度随时间变化图

图9 功率随时间变化图
如图10所示,在13s左右,动力电池SOC值减小至40%以下,此时动力电池充电模式被激活,直到SOC值为90%才会停止充电。结合图8、图9可知,此时只有燃料电池提供所需功率,动力电池所需功率为-25kW,这意味着,当FCHV加速时,动力电池会从燃料电池获得电力进行充电,此时无法再满足所需扭矩。在16s后,制动信号为80%,说明驾驶员有制动意图,整车处于减速状态,该阶段属于制动再生阶段,电机变为由车轮驱动的发电机,为动力电池充电,燃料电池功率输出功率逐渐降低。

图10 动力电池荷电状态
4 总结
本文根据燃料电池和动力电池的特点,针对燃料电池和动力电池电-电混合汽车,设计了一种能量管理系统,并在Matlab/Simulink仿真平台上对该能量管理系统应用于FCHV上的表现进行仿真模拟。仿真结果表明,本文建立的能量管理系统可有效分析判断车辆当前需求功率,并对所需功率进行合理分配,在保障电池安全性的同时满足车辆动力性和经济性的要求,为研究燃料电池动力电池混合动力汽车功率分配问题提供指导。
