基于锚定传感器的水面WSN强栅栏覆盖算法仿真
2020-03-13郭新明张宗佩
郭新明,张宗佩
(咸阳师范学院 计算机学院,陕西 咸阳 712000)
0 引言
无线传感器网络 (Wireless Sensor Network,WSN)是无线通信技术、传感器技术、计算机技术等多种技术快速发展及融合的产物[1]。栅栏覆盖作为WSN技术研究的一项重要内容[2],越来越受到科研工作者的关注。栅栏覆盖的概念是由Gage在机器人领域中首次提出来的[3],文献[4]首次给出了强栅栏和弱栅栏的定义。有关WSN栅栏覆盖技术的研究已经在三维覆盖[5-6]、全视角栅栏覆盖[7-8]、水下栅栏覆盖[9-10]等领域取得了较为丰硕的成果,但水面无线传感器网络栅栏覆盖的研究相对较少。在水面部署无线传感器网络并构建WSN栅栏以获取水面的有关信息,对水资源及生态环境保护、水运监管、洪涝灾害监测等领域均具有重要意义,但在水面部署无线传感器网络并构建WSN栅栏与陆地环境最大的不同是在水面部署的传感器节点容易受风浪外力作用而产生漂移情况,因此形成栅栏并保障网络正常运行的难度较大[11]。
文献[11]提出一种构建水面WSN弱栅栏覆盖的WBWS方法,利用匈牙利算法派遣可移动节点将离散的子栅栏进行拼接形成水面的弱栅栏覆盖。该方法能够通过低功耗实现弱栅栏的构建,但依然无法彻底解决无线节点的漂移问题。本文提出了一种基于锚定传感器的水面WSN强栅栏覆盖方法,将水面无线节点的漂移距离控制在一个固定范围内,有效克服了水面无线节点受风浪等外力作用随机漂移的困难,进而为建立水面无线强栅栏覆盖创造有利条件,实现了对水面环境的有效监测。
1 节点模型与问题描述
1.1 水面无线传感器节点模型
在水面部署WSN,并形成相对稳定的无线传感器网络栅栏,首先应克服传感器节点受风力、水流等外力因素产生漂移导致节点位置不稳定的困难。基于此,本文提出了锚定无线传感器节点模型,如图1所示。
每个锚定无线传感器节点S的传感半径为r(图1中阴影部分),且用缆绳与一个锚链接,节点能够漂浮于水面,锚沉于水下陆地,缆绳的长度为L,水深为H,且L>H。节点S的漂移范围被限制在水面上以锚到水面的垂足为圆心、以R为半径的圆盘范围内,其中R如式(1)所示。
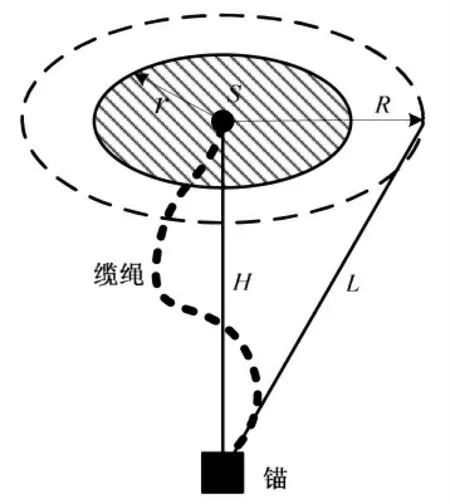
图1 水面无线传感器节点模型构造图Fig.1 Surface wireless sensor node model diagram

网络中所有锚定无线传感器节点同构,且节点一旦部署,锚的位置将不再发生改变。
1.2 锚定无线传感器网络水面强栅栏构建问题描述
在水面实现WSN强栅栏覆盖的困难在于无线传感器节点易受水流及风力等自然因素的影响而产生位置漂移,这可能导致刚刚构建的栅栏迅速失效,无法在水面实现有效的栅栏覆盖。针对上述问题,本文提出了在水面无线传感器节点上捆绑锚的方法来控制其的漂移范围,从而使无线节点的位置相对稳定,在此基础上构建水面的WSN强栅栏覆盖。水面WSN强栅栏覆盖能确保水面监测对象沿任意路径穿越目标区域时均可被传感器节点检测到,进而实现对水面环境的有效监测。
1.3 有关假设
为了便于研究,本文假设水下陆地(河床、湖底等)均是平坦的,没有任何起伏,仿真平台中的实验环境也按照此假设进行设计。
2 锚定传感器水面WSN强栅栏覆盖算法设计
2.1水面传感器节点漂移模拟算法
这里用(Xnew,Ynew)表示节点漂移后的新坐标,用(Xold,Yold)表 示 节 点 漂 移 前 的 坐 标,用(Xanchor,Yanchor)表示捆绑节点的锚到水平面的垂足的坐标。
2.1.1 随机漂移算法
漂浮在平静湖面上的传感器节点的漂移轨迹,可以看作是一种随意漂移行为,节点的偏移方向θ是一个随机角度,θ∈[0°,360°),漂移步长为l。若节点的初始位置为(Xanchor,Yanchor),若其漂移距离没有超出节点的最大漂移范围,则节点漂移后的新坐标如式(2)所示;否则,节点漂移后的新坐标(Xnew,Ynew)如式(3)所示。
2.1.2 非随机漂移算法
若水面有风或者水沿某个方向流动,则漂浮在水面的传感器节点的漂移轨迹,将受水流、风力等自然因素的综合影响,漂移方向与外力合力的方向α基本相同,并有少许波动。假设节点的初始位置为(Xanchor,Yanchor),则在受外力的情况下,节点漂移后的新坐标如式(4)所示。

其中σ作为合力方向角α的扰动因子,是一个随机数,且σ∈(-5°,5°)。
2.2 锚定传感器水面WSN强栅栏覆盖算法
基于水面传感器节点的漂移算法,锚定传感器水面WSN强栅栏覆盖算法的详细步骤如下:
步骤1在指定的水面区域内随机部署若干个锚定无线传感器节点,部署密度要确保网络能够与岸上Sink节点连通。
步骤2定义计时器T=30,t=5。
步骤3计时1秒,t=t-1;T=T-1。
步骤4 若t≠0且T≠0,执行步骤3,否则执行步骤5。
步骤5若t≠0,执行步骤6,若t为0,利用水面传感器节点的漂移模拟算法(随机漂移算法或非随机漂移算法)计算出每个无线传感器在水面的漂移位置,令t=5,执行步骤6。
步骤6若T≠0,执行步骤3,若T为0,基于传感器节点的漂移位置建立网络节点的邻接矩阵(若两节点感知范围相交则权值定义为1,若不相交权值定义为∞)。基于邻接矩阵,利用Floyd算法[12]求出起始节点和终止节点间的最短路径,该路径即为无线传感器强栅栏,并将其存入强栅栏集合。T=30,执行步骤3。
3 仿真实验及分析
3.1 仿真实验平台的搭建
锚定传感器水面WSN强栅栏覆盖仿真实验平台采用Eclipse10进行搭建。实验平台为长1800m、宽900m的矩形水面区域,在该区域中随机部署若干感知半径为50m的无线传感节点,仿真实验平台效果如图2所示。
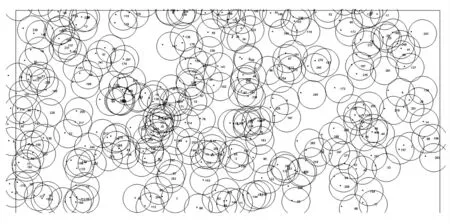
图2 仿真实验平台效果图(部署了280个无线节点)Fig.2 Renderings of the simulation experiment platform(280 wireless nodes deployed)
3.2 锚定传感器水面WSN强栅栏覆盖算法仿真
在上述的仿真实验平台上,分别对水面无线传感器节点的随机漂移和非随机漂移现象进行强栅栏覆盖的仿真实验,图3显示的是在有外力作用下节点产生漂移后形成的强栅栏效果图。图中的每条细线代表一条强栅栏。
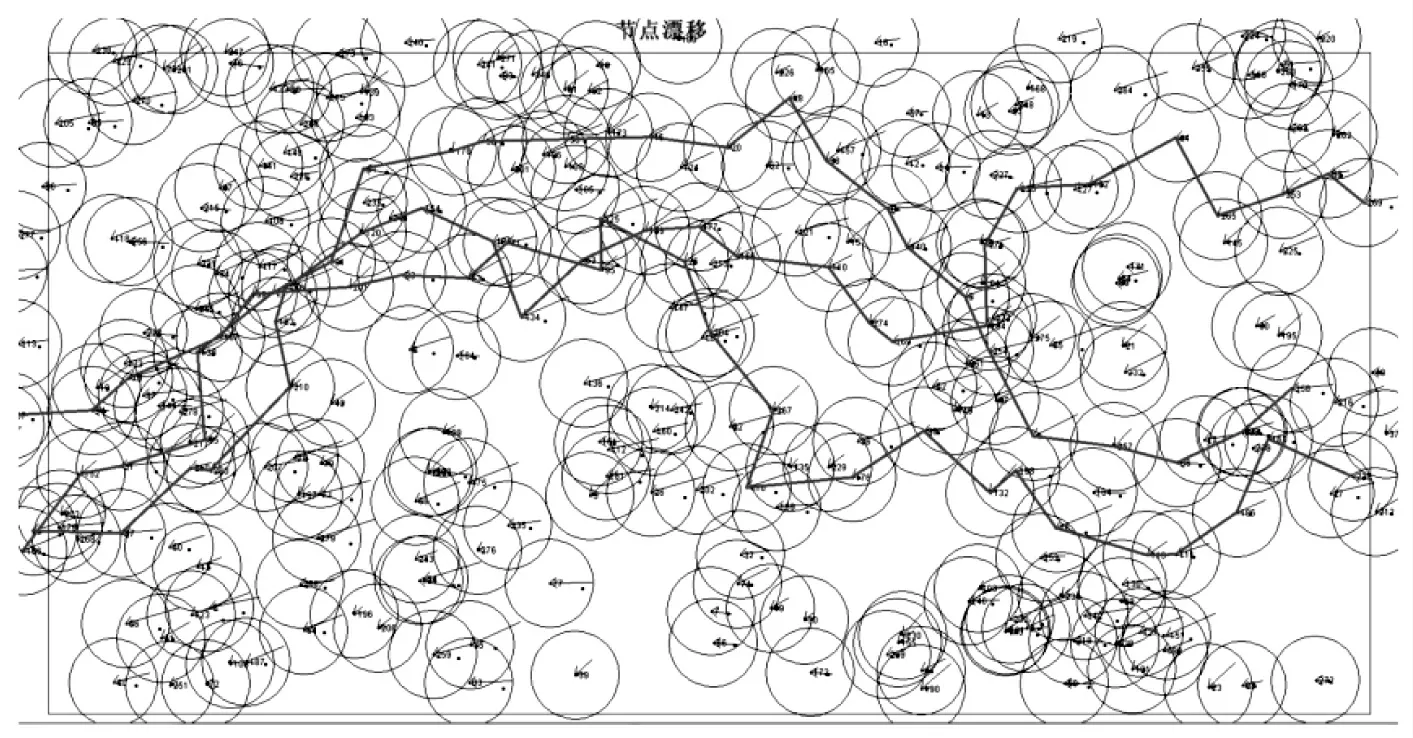
图3 节点非随机漂移后构建的情况下的强栅栏效果图Fig.3 Renderings of strong barriersunder the condition of non-random drift of nodes
无线节点的非随机漂移完全受外力影响,外力发生改变后栅栏覆盖很可能失效,所以要周期性地检查栅栏的连通情况,一旦发现栅栏中断,应立即重新构建新的水面栅栏。图4所示为栅栏覆盖中断修复前后的对比图,其中细线表示修复前的栅栏,粗线表示修复后的栅栏。
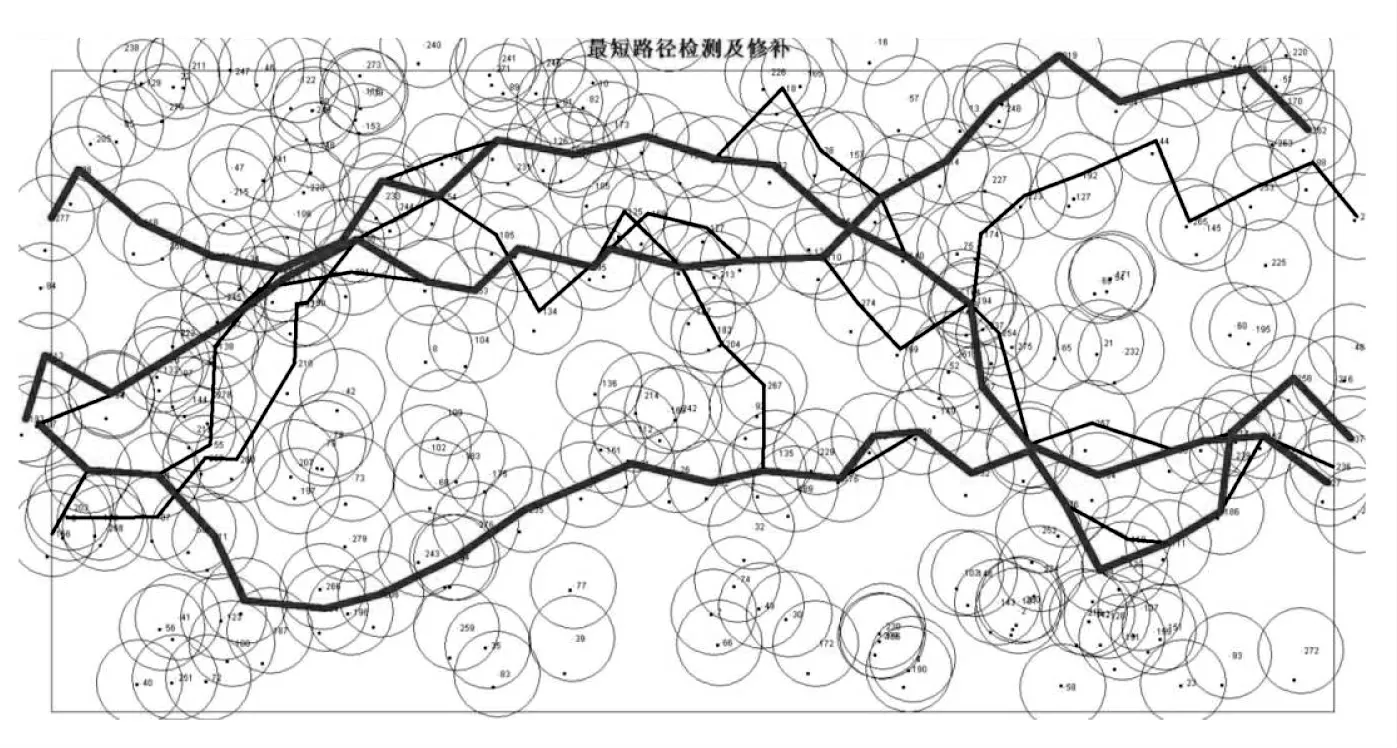
图4 栅栏中断修复前后的对比图Fig.4 A comparison of barriers before and after interrupted repair
3.3 仿真实验结果分析
在长1800m、宽900m的矩形水面区域内部署不同数量的无线传感器节点,并运行锚定传感器水面WSN强栅栏覆盖算法,对实验数据进行统计,结果如图5所示。根据图5可以看出,随着矩形水面区域内部署无线传感器节点数量的增加,形成的强栅栏条数也随着增加,但非随机漂移情况下的仿真效果更趋稳定。
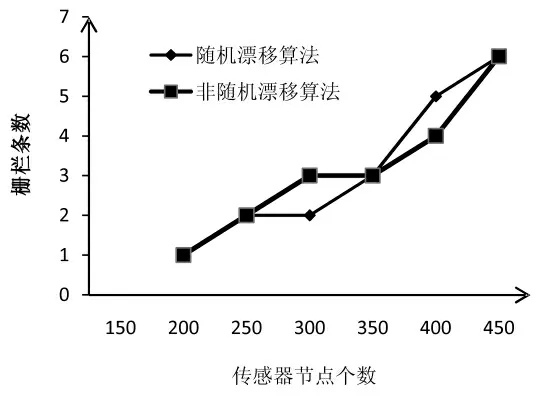
图5 部署传感器节点个数与栅栏条数的关系图Fig.5 The relationship diagram between the number of sensor nodes and the number of barriers
4 结语
本文针对水面漂浮的无线传感器节点受外力作用产生漂移,导致网络节点位置不稳定给强栅栏覆盖造成较大困难的问题,提出了一种基于锚定传感器的水面WSN强栅栏覆盖算法。该算法将水面无线节点的漂移距离控制在一个固定范围内,有效克服了水面无线节点受风浪等外力作用随机漂移的困难,进而为建立水面无线强栅栏覆盖创造了有利条件,实现了对水面环境的有效监测。仿真实验结果显示,随着水面部署的无线传感器节点数量的增加,形成的强栅栏条数也随着增加,且非随机漂移情况较随机漂移情况的仿真效果更稳定。
本文的研究成果虽然有效克服了无线节点受外力作用随机漂移的困难,但依然存在不足之处,比如没有考虑水下陆地不平坦对水面强栅栏构建的影响等,这些将是后续研究所需解决的问题。
