军事目标关系的拟合地势及双重保凸可视建模
2020-03-11王家润孙禹楠杨志龙
王家润,孙禹楠,尹 辉,杨志龙
华北计算技术研究所 基础三部,北京100083
1 引言
随着互联网技术的迅猛发展,国家及军队的网络安全日益重要,网络态势可视化也成为研究热点[1-2]。不仅如此,在军事作战战场综合态势中,军事目标之间内部复杂抽象的逻辑关系(通信、指挥、作战编队、目标跟踪等)可视化,已成为战场态势感知的关键,也已成为战场态势可视化的重点研究内容,深度揭示敌方的作战意图,从而整体提升军事作战的决策水平。
网络可视化一般转换成图的node-link 表达[3],重点是自动布局算法[4]及图的绘制美学标准研究[4],在军事场景中,还需要考虑目标的三维空间真实位置约束。文献[5]中,通过建立IP与经纬度的映射,以互联网目标的分层层次作为逻辑高度,建立赛博空间与三维地理空间的一一映射,但缺失真实的高度信息。文献[6]中,对互联网节点基于节点的地理位置约束进行了网络拓扑可视化,并在三维数字地球上进行可视,地面上节点之间采用近似抛物线表达连接关系,但没有考虑地面的起伏对连线的影响。文献[7]中,美军军用编辑工具MOLE 中对军事目标进行了视觉上的重排,实际的地理位置采用锚点,显示位置与真实位置通过虚线相连,地理范围采用包络辅助显示,如图1 所示,但没有讨论三维显示。

图1 MOLE:锚点、地理范围凸包线等效果
在军事地形显示中,文献[8]对线贴地采用LOD 及道格拉斯-普克算法化简曲线等进行了处理,并对zfighting 闪烁现象进行深度偏移减弱,高程采样计算量较大,而且针对地形起伏变化剧烈的区域,完全贴地会引起视觉上的抖动感及破碎感。文献[9]中,采用经典的阴影锥技术,实现线面与地面的像素级融合,而且只能处理单色。文献[10]中,对交通道路网的绘制采用高度增加偏移量及垂直墙的显示策略,避免了考虑地形起伏的影响,但显示位置发生了变化。文献[11]中,在三维球上,对航空飞行路线的绘制采用B 样条边绑定、BumpMapping 技术、GPU Shade 等绘制,效果较好,但对地理位置的高度信息没有考虑。文献[12]采用滤波策略,可提取出地形起伏特征,一定程度上可消除地形剧烈起伏的影响。文献[13]采用梯度提取高程采样点的方法,可提取出地形起伏特征,消除地形剧烈起伏的影响。文献[14]将高程采样,提取地形起伏关键点,并采用B样条曲线拟合,实现标号的跨掠式显示。
目前网络可视化软件ECharts、Gephi、D3、FireEye、FORG3D、Pajek、Cytoscape[15]等,网络可视化布局算法及动态效果等较好,但是在三维显示中,没有考虑地形影响。军事标号的贴地绘制方法主要为在提取地势的基础上,对点集进行一定的处理,消除地形剧烈变化的影响,得到贴合地势的标号绘制,但是保留了地势的不断起伏变化。
本文面向军事作战领域,重点考虑三维虚拟战场中地形起伏的影响,并借鉴图的美学标准原则,提出了军事目标关系的保凸三维可视化。主要创新点:
(1)设计了融合、替换及剔除策略,采用凸包算法[16-17],优选出保凸特征点集,抽取出地形起伏主体趋势特征,消除了随地势的不断起伏变化。
(2)设计了保凸的Bézier 控制点[18-22]的几何构造方法,通过逐段连续插值光滑,实现整条曲线的保凸可视化。
2 军事双目标单一关系的保凸可视化
2.1 基本说明
研究两个目标之间的单一关系的三维可视化,军事目标群体的多重关系三维可视化可分解为两个目标之间的单一关系可视化。
定义(保凸特征点集)指两个目标之间绘制的连接曲线上的点集(含两个端点),是两目标之间连接曲线可视化的几何构建要素点集。通过保凸特征点集,依次连接各点,实现两个目标之间关系的三维可视化。
2.2 算法流程图
双目标单一关系可视化流程图如图2。
2.3 算法描述
三维坐标采用WGS-84地心坐标系,地球质心为坐标原点,位置描述:经度、纬度、高度。
输入:
大范围判定阈值Delta;高程采样率Rate;曲线光滑采样数Num ;球面弧最大高度Height ;视觉偏移调整量Modify;两个目标点AO、BO 的地理位置信息。
过程:
步骤1 构建两目标虚拟参考线。
将地球中心点EC 与目标点AO 相连,形成线段ECAO;将地球中心点EC 与目标点BO 相连,形成线段ECBO ,参见图3(AS 、BS 对应的海平面点;AG 、BG 对应的真实地面点;AN 、BN 对应的新点)。该步主要是建立与两个目标点AO、BO 对应的海平面点、地面点等参考信息。
步骤2 虚拟参考线夹角计算。
计算线段ECAO 与线段ECBO 的夹角angle,如果angle >Delta,则AO 与BO 两目标相距较远(默认大于1 000 km,短程弹道导弹的射程范围上限),采用大范围绘制算法,转到步骤3;否则,转到步骤4。

图2 双目标单一关系可视化流程图
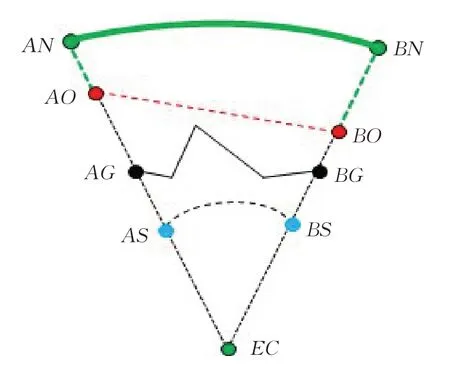
图3 大范围球面弧保凸特征点集示意图
步骤3 构建大范围球面弧型保凸特征点集(第III类保凸特征点集)。
沿线段ECAO 延伸至AN ;沿线段ECBO 延伸至BN 。点AN 与BN 的高度统一采用输入参数:Height 。最后形成的折线段:AO 点、AN 与BN 之间的球面弧线各点、BO 点,构成保凸特征点集,即为目标AO 与目标BO 之间最终的连接曲线点集,参见图3 中上部绿色折线上的点集。转步骤8。
步骤4 两目标剖面分析,获取高程采样。
使用高程采样率参数Rate,采用GIS 两点之间的剖面分析功能,沿球面插值采样,计算目标AO 、目标BO 对应的经纬位置点之间的剖面高程点集,参见图3中AG、BG 两点及两点之间黑色折线上的点。
步骤5 融合、替换、剔除及凸包处理。
采用目标点AO 替换点AG ;采用目标点BO 替换点BG ;基于点集:EC、AO、AO 与BO 之间的剖面点集、BO ,进行凸包(Graham 凸包算法)处理,得到凸包点集,再剔除点EC,形成新的凸点集。如果返回两点点集,则转到步骤6,否则转到步骤7。
步骤6 构建小范围两点型保凸特征点集(第I类保凸特征点集)。
由AO 、BO 两目标点之间连线与三维地形无交点,该两点直接构成保凸特征点集(此处为统一描述,将线段两点统一描述为保凸特征点集),线段AOBO 即为AO、BO 两目标之间的连接线段。转步骤8。
步骤7 构建小范围曲线型保凸特征点集(第II类保凸特征点集)。
针对新的凸点集,采用逐段连续的光滑插值算法进行光滑处理[19],获得保凸特征点集,参见图4 中AO 与BO 之间上部绿色曲线点集。转步骤8。
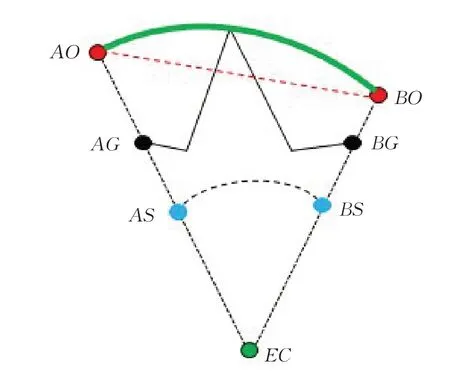
图4 小范围Bézier曲线保凸特征点集示意图
步骤8 可视化绘制。
针对第I、II、III 各类保凸特征点集,采用几何线段依次相连,基于VBO技术绘制出曲线,实现可视化。
2.4 算法补充
2.4.1 保凸可视化曲线(或点集)分类设计
算法产生的保凸特征点集共分为三种类型:小范围两点型(第I 类保凸特征点集)、小范围曲线型(第II类保凸特征点集)、大范围球面圆弧型(第III 类保凸特征点集)。
(1)小范围两点型(第I类保凸特征点集)
当在小范围时,两目标之间连线与三维地形无交点时,此时从视觉感知方面看,线段距离最短、最简洁,因此此时采用两点线段进行可视表达,视觉效果较好。
(2)小范围曲线型(第II类保凸特征点集)
当在小范围时,两目标之间连线与三维地形有交点时,地面高山等的起伏影响将会占据视觉主导,所以此时要精细处理。获得两点之间球面弧上的高程采样点集,获取高程信息(地形起伏变化);采用凸包算法,优选获取地形的整体起伏趋势;再经过保凸光滑插值处理,获得保凸特征点集,最后生成的整条曲线基本拟合地势、整体保凸等,视觉效果较好。
剖面分析中会使用对应金字塔级别的高程数据,GIS剖面分析接口中会设置相应的金字塔级别,算法中设置高程采样率Rate 参数,主要也是考虑高程数据采样级别影响,在实际中可根据实际对应调整该参数。
算法中曲线光滑采样数参数Num,主要是调整曲线的光滑度,根据实际要求做调整。
(3)大范围球面圆弧型(第III类保凸特征点集)
在较大范围内,大球面弧线成为视觉感知的主体,尤其是在三维场景中,目标之间相距较远时,视觉主体主要是两者之间的连线关系,此时可主要考虑地球曲率的影响,忽略地表地形起伏的变化影响。同时也考虑:GIS 中的剖面分析,针对大范围时,会存在一定的性能问题,所以针对大范围情景,采用更高效、更简洁的算法进行简化处理,采用较粗略的地球球面弧绘制简单,直接的球面插值采样计算方面也更为简单。算法中设置球面弧最大高度参数Height ,一般可设珠穆朗玛峰高度8 848 m(或稍高些:10 000 m)。为保证在两端处连接的光滑性,可进行局部中点逐次光滑逼近。较好的可采用基于视点的自动光滑,结合GPU 细分着色器进行实时光滑处理。
2.4.2 凸包算法前后的融合、替换及剔除策略设计
(1)采用目标AO 位置替换AG 位置;采用目标BO 位置替换BG 位置。即将目标位置点与剖面分析的高程点进行融合及替换。
设计思路:因为可视化是绘制目标AO 、目标BO的连接曲线,希望这两点能是最终曲线上的首末点,所以将该两目标点提前参与。特别注意:在本文中,为讨论方便,限定军事目标位置不能低于地面点以下,AO只能在AG 的外侧(上部或该点),同理,BO 只能在BG 的外侧(上部或该点)。
(2)凸包计算前,将地球中心点EC 加入,构建新点集:EC、AO、AO 与BO 之间的剖面点集、BO,基于该点集,采用凸包处理后,再从产生的点集中剔除地球中心点EC。
设计思路:点EC 参与凸包计算,主要是保证整个凸包点集向外凸出(从地球内部往外看),以便保证最后两目标之间的连接曲线向外凸出(即向上凸出);凸包处理后,再剔除地球中心点,主要是保证最后绘制的曲线起点与终点恰好是目标AO、BO 两点。
经过上述策略处理,构建出的凸包点集,具有良好的整体外凸性,表现为特征点从地心向外分布,将地形高程采样点集简化为较少的保凸特征点集,优选出地势的主体变化特征点,在一定程度上屏蔽地形的起伏[12-14],为后面的可视化奠定了关键基础。
2.4.3 保凸Bézier控制点的几何构造
参照图5,输入凸点集ABCDE。以CD 为例:在该段上再插入两个新控制点,然后以C、D 端点及这两个新控制点,构造一段三次Bézier曲线。以下标表示新插入的控制点,例如:D 的左右两侧D1及D2。
(1)内部新增控制点的几何构建过程
以点C 为例,在三角形BCD 中:
①计算中线GH 。
②记a=CG 与CH 的长度比值,在GH 上取点F,使得GF 与FH 的长度比值为:
a=CG/CH=GF/FH
③过C 点作GH 的平行线C1C2,使得CC1=GF,CC2=FH 。
④过C2作CD 的垂线L1;过D1作CD 的垂线L2,比较两条垂线长度,取较小者(例如L2)对应的点D1,则过D1作CD 的平行线,交C1C2于点C3,则C3、D1即为CD 内部所求的两个新控制点。
依据上述过程,依次逐个处理非端点的各点。在端点处,进行特殊处理:开始端点A 的右侧控制点A2,使得A2=A,左侧控制点A1忽略;结束端点E 的左侧点E1,使得E1=E,右侧控制点E2忽略。
(2)保凸Bézier曲线几何设计思路
①四个控制点下的Bézier曲线形状变化
参看图6,在不同的控制点下,Bézier 曲线(中间曲线)形状会有较大变化。圆形点表示开始与结束两个控制点,中间方形点表示内部两个控制点。可看出,如果Bézier 曲线需要保凸,则内部两个控制点需要保证同侧、不交错,关键是保证四个控制点(特征多边形)是凸点列[18-19]。
②整条Bézier曲线的连续保凸光滑
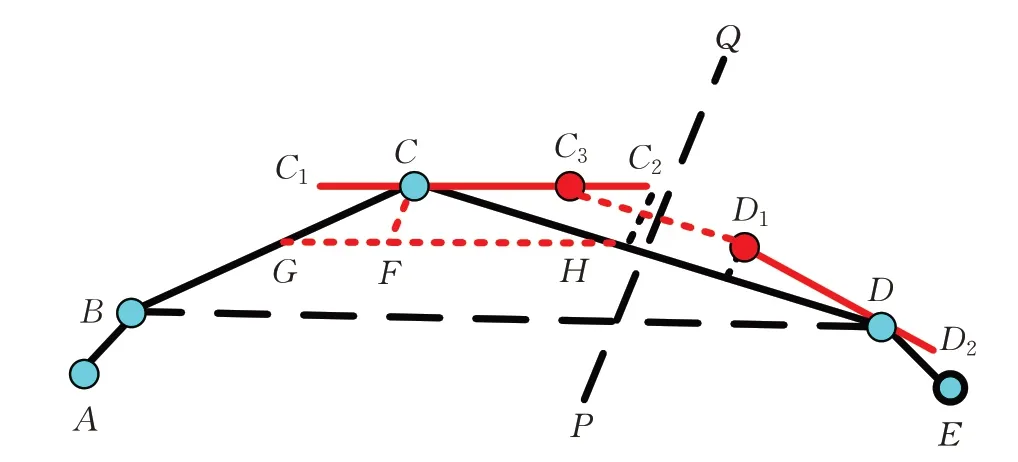
图5 Bézier曲线保凸控制点构造示意图
图5 中,在线段AB 上,基于A、A2、B1、B 四个控制点,构造三次Bézier 曲线;在线段CD 上,基于C、C3、D1、D 四个控制点,构造三次Bézier 曲线,其余各段类似处理。将各段Bézier曲线依此相连,合成出整条的Bézier曲线,即为最终所求的曲线。整条曲线具有如下几何特点:连续光滑;整体保凸。

图6 内部控制点不同分布生成曲线示意图
在每个输入点的两侧生成的控制点共线,例如C 点的两侧控制点C1、C3,保证了各段Bézier 曲线在连接处的光滑[18];输入点列ABCDE 是凸点列,并且在每一小段上的Bézier新插入的两个控制点处于同一外侧(C点的两侧控制点C1、C3),四个控制点(C、C3、D1、D)组成的特征多边形是梯形,保证了是凸点列,从而保证了该段上的Bézier曲线外凸[22]。综合上述两个阶段的保凸处理,最后合成的整体Bézier曲线保凸[19-20]、连续光滑。
③两个新控制点无交错的证明
下面证明:在每个输入点两侧插入的新控制点,长度小于所投影所在边长的1/2。该处理主要是保证新插入的两个控制点不会出现相互交错,从而避免该小段上的Bézier曲线出现扭曲等现象,参见图6(c)。
由构建过程知a=CG/CH=GF/FH,即GF=aFH,CG=aCH 。在三角形GCH 中,GH <GC+CH,GH=GF+FH,得出GF+FH <GC+CH,即有aFH+FH <aCH+CH,即FH <CH ,由构建过程知CC2=FH ,H是CD 中点,可知:CC2<1/2CD。因为C3处于C、C2之间,所以CC3<1/2CD,类似可证明DD1<1/2CD,即C3与D1位于CD 的垂直平分线PQ 两侧。
④平行截取处理的保凸及视觉设计
“过D1作CD 的平行线,交C1C2于点C3”,使得C3D1∥CD,通过这种平行截断,构建了一个梯形,保证了四个控制点组成的特征多边形CC3D1D 是凸点列,由Bézier曲线的保凸性可知:特征多边形是凸多边形时Bézier曲线是凸的,而且较好地抑制了每小段(CD)上构建的Bézier曲线可能出现的单侧较高凸起的现象[18],延伸到空中的空间紧凑感也更好,曲线的局部对称性也得到较大的改善。在C3D1与CD 之间,任意平行线与两侧的交点,都能满足凸点列要求,但是与CD 太接近,导致该段上的Bézier曲线过度接近CD 线段,视觉上无法感觉出光滑的效果。也可不用平行线段,只将C2朝C1回移,找到保凸的新点,构成凸点列,但是中间两个控制点的高度可能不同,曲线可能会出现单侧凸起现象,曲线的对称性会较差。综合考虑,平行截取方法构建的Bézier曲线贴近凸包线、连续光滑、近似对称、空间占有较少等,视觉上的美感较好。
2.4.4 算法时间复杂度分析
整个过程主要包含三个阶段:剖面分析、凸包提取、Bézier插值光滑。剖面分析主要是依据高程网格数据,线性查询出采样点的高程数据,时间复杂度O(N);Graham扫描算法时间复杂度为O(N×lb N)[17];Bézier光滑处理时间复杂度为O(N)。整体时间复杂度为O(N×lb N),其中N 为点集中点的个数。
2.4.5 视觉偏移调整量Modify参数
在三维叠加矢量显示时会出现z-fighting 闪烁现象[8],一般需要做一定的处理,保证无闪烁的视觉效果。在构造凸包点集前,针对高程采集的中间点可增加一定的视觉偏移量(两个目标点不增加该偏移量,保证首末位置的准确性),进行适当升高,算法中的视觉偏移调整量Modify 主要是考虑此处,可根据实际进行调整。本文可视化算法中已保证整条曲线外凸,所以增加稍许偏移量,不会影响整条曲线的整体外凸趋势,视觉效果上影响较小。
2.4.6 视觉美学原则的符合性分析
图的绘制美学原则[4]主要包含直线边原则、区域最小化原则、凸多边形原则等,本文算法依据这些原则实现连线的绘制。
(1)直线边原则
人类视觉感知最直接的方式,是最直观的展示网络连接的方式。在两点之间不会穿山的时候,优先选用直线段绘制连线,即小范围两点型。
(2)区域最小化原则
网络拓扑图的绘制应该尽量节省屏幕空间。本文算法中小范围曲线型依地势进行绘制,大范围球面圆弧型以珠穆朗玛峰高度进行约束,与文献[6]中的直接采用抛物线绘制相比,三维空间占用较少,屏幕占用空间也会较少。
(3)凸多边形原则
与凹多边形相比,凸多边形具有视觉上的完美感,视觉美感较好。本文算法中小范围曲线型由凸包和保凸的Bézier 插值得到,大范围球面圆弧型拟合地球球面,整条曲线外凸,和球心可以构成完整的凸多边形,并且由此能消除视觉上的抖动现象。
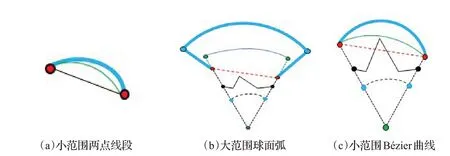
图7 保凸特征点集不同类型的多重绘制示意图
3 军事目标群体多重关系的保凸可视化
针对军事目标群体多重关系的可视化,可通过分解为两目标之间单一关系的三维可视化进行处理。
3.1 可视化数据模型
基于图论,建立数据模型M=(V,E),V :目标(或顶点)集合(含位置信息,显示样式:包围球、颜色等);E:关系(或边)集合(含连线样式:颜色、粗细、动态、方向性、绘制偏移量等基本显示属性)。
3.2 构建性能优化
目标群体包含的关系较多时,显示连线的构建,整体来说计算量将会比较大。考虑到每条连线的构建过程相互独立,可采用OpenMP或CUDA等高性能并行计算API[23],进行性能优化。
3.3 显示性能优化
绘制时可采用GPU Shader进行高性能等绘制[11]。
3.4 多重关系的偏移绘制
两目标之间,如果存在多种关系时,需要考虑不同连线的偏移,避免两目标之间不同连线的空间显示重叠,需要符合图的美学一般原则:边交叉数量尽量少。针对三种保凸特征点集类型,进行不同的多重偏移处理:
(1)小范围两点型
作中垂线,在中垂线上向外(从地球球心向外看;如果线段垂直地面,可考虑以指北针方向为基准,增加旋转偏移)取一点,采用最大值抛物线法或最大值Bézier曲线法构建,结果见图7(a)中最上部的绿色及蓝色曲线,可依次向外追加绘制偏移量向空中扩张。
(2)大范围球面圆弧型
将两线段分别向外旋转一个绘制偏移角度,并分别延长一个绘制偏移长度,再整体绘制,参看图7(b)中最上部的全部蓝色折线部分。
(3)小范围曲线型
将高程剖面分析中(不含两个端点)各点高度增加一个绘制偏移量,再采用凸包拟合光滑法(简称:凸包拟合法)进一步处理,参见图7(c)最上部的蓝色弧线部分。
4 实验
4.1 实验条件
Win7 64位操作系统,i7-3770,3.4 GHz CPU,4 GB内存,GTX 650ti显卡。三维开源图形引擎Open Scene Graph(OSG)[24]版本为3.0.1。采用1∶25 万DEM 高程数据,地理范围:北京香山附近。
4.2 结果及分析
4.2.1 作战态势图绘制效果
分别使用本文算法、贴地绘制和直线绘制一张作战态势图,包含目标13个(其中空中目标2个,地面目标11个),连线20条,如图8、图9、图10所示。
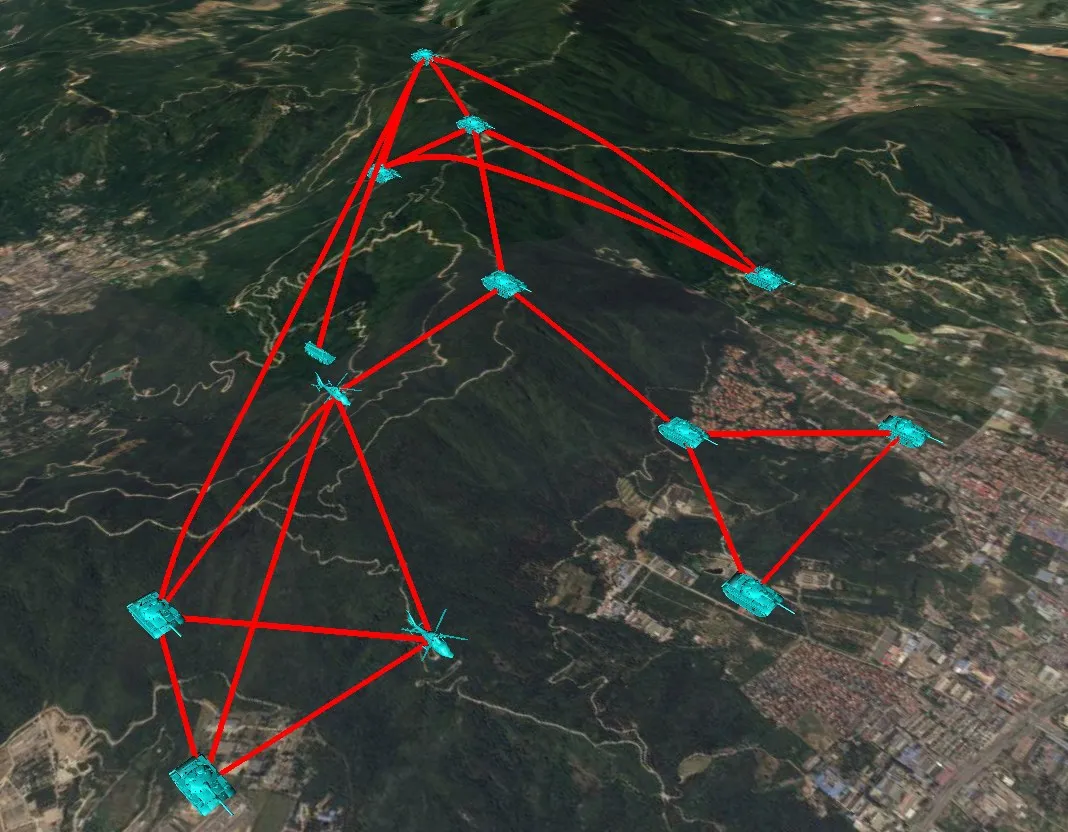
图8 本文算法绘制效果
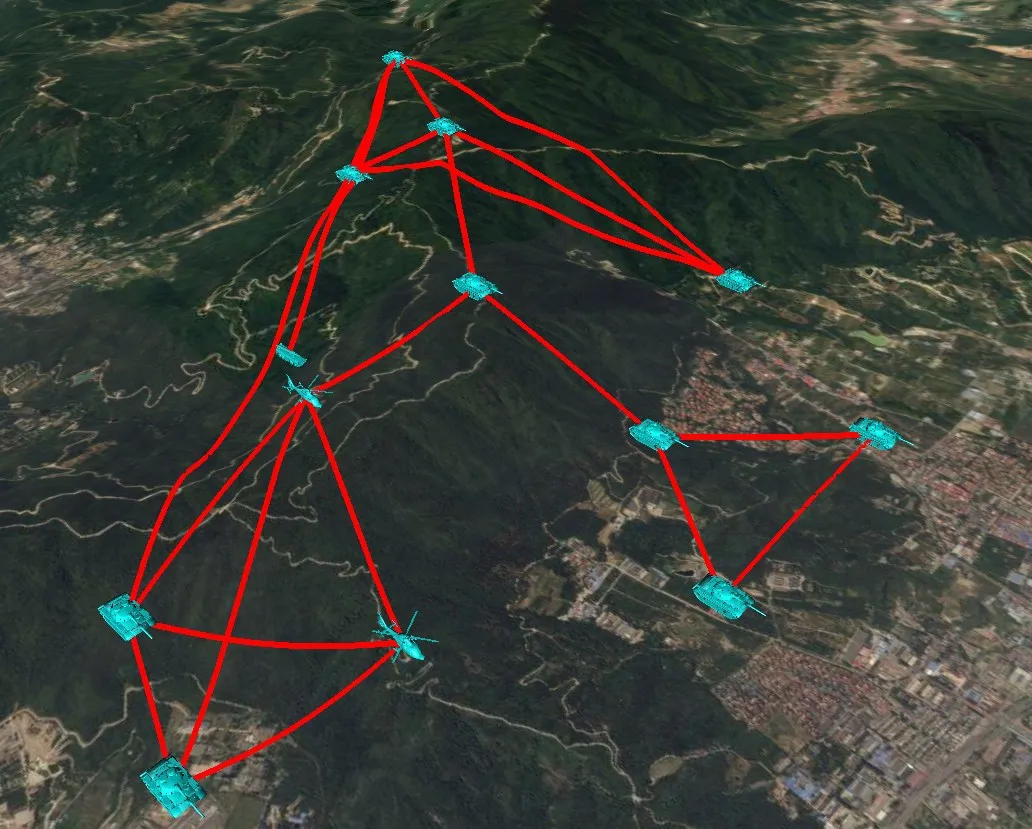
图9 贴地绘制效果
比较图8和图9可看出:图9中贴地连线,部分连线凹凸变化,出现视觉上的抖动感,其中5 条具有明显抖动,2条有一定的弯曲,都是由于下方空中目标产生,共占比35%。产生抖动和扭曲的连线不符合图的凸多边形原则,视觉美感较差。图8 中采用本文算法绘制,连线保证外凸(从球心方向往外看),符合图的凸多边形原则,视觉美感较好。
图10 直线绘制效果
比较图8 和图10 可看出:图10 中直线绘制,部分连线出现“穿山入地”现象,其中5 条比较明显,1 条轻微被地形遮盖,共占比30%。“穿山入地”导致连线在视觉上出现“破碎”感,视觉效果较差。图8 中采用本文算法绘制,连线外凸,较好地对“穿山入地”的连线进行了校正,已基本没有穿山入地现象,验证了本文算法的有效性。
整体上看,本文算法绘制的效果,比贴地绘制和直线绘制的效果要好,综合来看,该态势图中有7 条连线得到了改善,效果改善提升约为35%。
4.2.2 局部连线绘制效果与分析
图11中高程采样后,经过凸包处理,共有凸包点六个,其中右侧除端点外还有两个凸点。
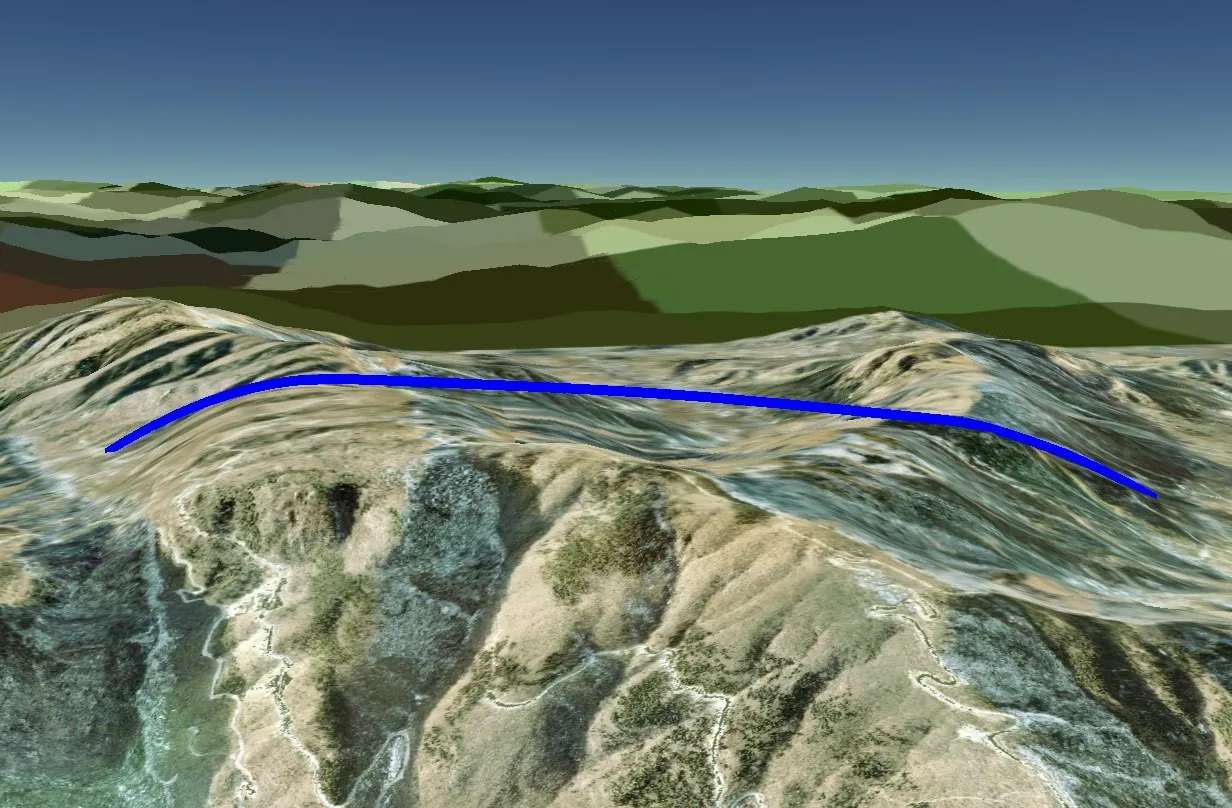
图11 跨越多山峰:凸包拟合曲线效果
比较图11~图13,可看出:(1)凸包拟合曲线能提取多个山峰的主要趋势,无“穿山”现象,保凸、光滑。(2)贴地曲线,每点取自实际的地面高程点,与凸包拟合曲线相比,视觉感知波动较大,不符合图绘制美学中的凸多边形原则;从不同的视点看,中间山坳部分的曲线可能会被附近的山引起前后遮挡,造成视觉上对整条曲线的“间断感”及“破碎”感[12],而凸包拟合曲线则有较好的抗“破碎”能力。(3)最大值Bézier 曲线使用首末凸包点及最高凸包点三点生成。只在最高点附近拟合较好,在右侧较低山峰附近,与凸包拟合曲线在该处差距较大,因为只使用了左侧的最高凸包点,缺失了中间右侧的凸点,忽略了这些凸包点处的地形高度信息,导致拟合地势不足,在较低处附近出现了部分曲线的“穿山”现象。
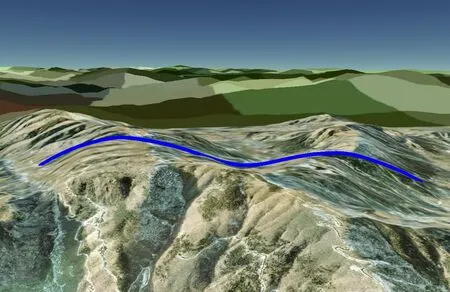
图12 跨越多山峰:贴地曲线效果
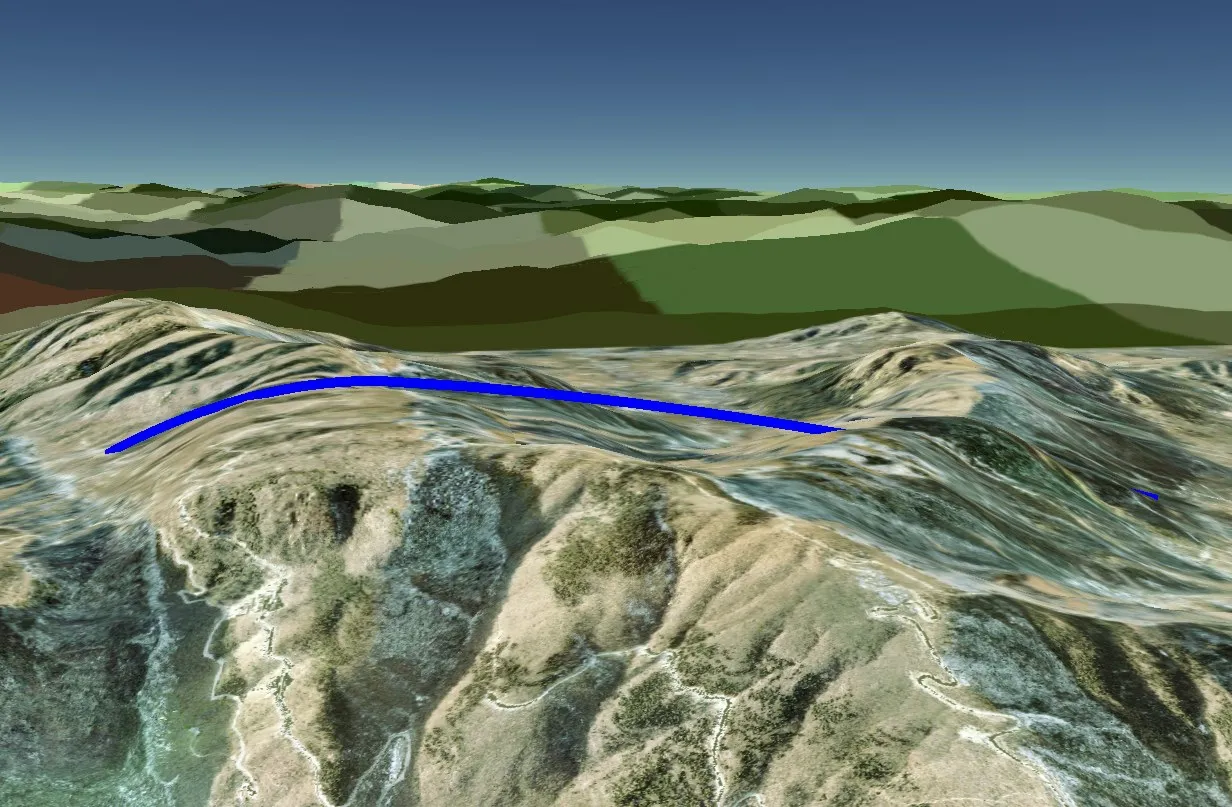
图13 跨越多山峰:最大值Bézier曲线效果
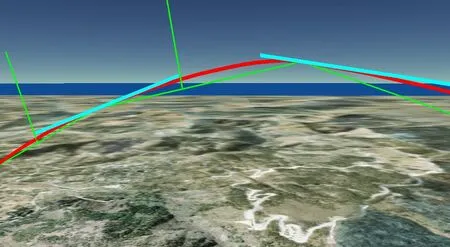
图14 曲线局部几何特征综合分析(隐去高程后)
图14中的下部细折线为凸包线,中间曲线为Bézier曲线,上部粗线段为控制点连线,向上的垂线为凸包边的垂直平分线。从该图可看出:(1)新插入的控制点在垂直平分线两侧,不会越界与交错;(2)每一小段上的Bézier 曲线保凸且处于外侧,与凸包线的凸性一致;(3)两个新控制点连线与该段基本平行,特征多边形构成凸点列;(4)每一小段上的Bézier曲线近似对称,没有明显的单侧凸出现象;(5)整条曲线(中间曲线)保凸,贴近凸包线,与文献[6]中的抛物线效果相比,空间占用更少;(6)整条曲线连续、光滑。
4.2.3 算法性能与结果分析
对算法中的时间及中间数据进行统计,最大值Bézier 曲线(简称最大值曲线),凸包拟合光滑线(简称凸包拟合线)。表1 是绘制不同数目曲线的时间统计,表2是不同精度时各类曲线生成的时间统计,图15是与之对应的曲线图,表3是与表2对应的高程采样点、凸包采样点等的点数统计,图16是与表3对应的高程采样点数与凸包点数比较曲线图。精度系数越大,高程采样点数越多,曲线越精确,默认精度系数取0.1。
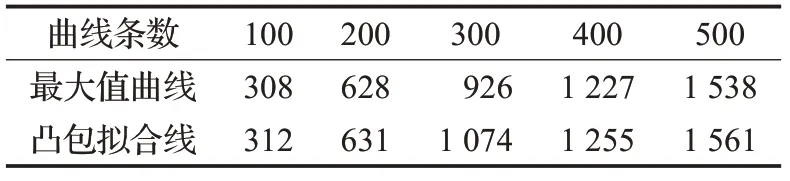
表1 不同数目曲线的生成时间 ms
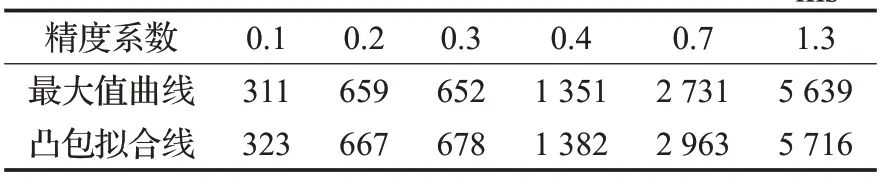
表2 不同精度曲线的生成时间 ms
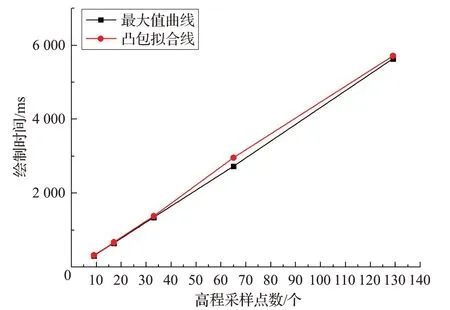
图15 不同采样点数生成时间

表3 不同精度曲线的点数 个
从表1 可知,随着曲线条数的增加,凸包拟合线生成时间与最大值曲线生成时间都呈线性增长,两者时间基本近似。
表2是不同精度下,凸包拟合线生成时间与最大值曲线生成时间都呈线性增长,两者时间也基本接近。结合表3,参看图15,可看出:随高程采样点数的增加(即精度增加),凸包拟合线生成时间与最大值曲线生成时间都呈线性增长。
从表3 看出,高程采样点数变化范围:9~129,而对应的凸包拟合线(光滑前)的凸包点数已得到极大的优化,点数范围降低到:4~7。参看对应的图16可知:在高程采样点数不断增加(即精度增加)的情况下,凸包点数基本趋于稳定,这表明了凸包在抽取地势整体变化趋势方面,具有很强的简化能力。
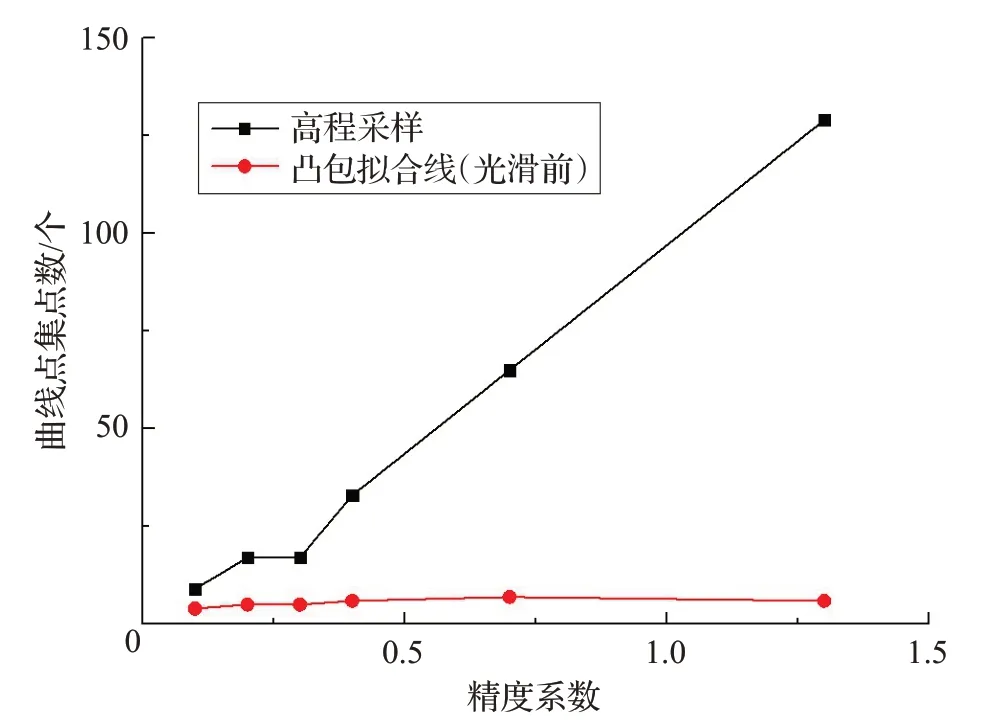
图16 凸包点数和高程采集点数对比
4.3 实验结论
综合上述实验结果,结论如下:保凸可视化算法生成的目标连接曲线具有较好的特点:整体保凸、光滑、拟合地势较好、无“穿山入地”现象、符合图的美学原则等。算法中的凸包对地势整体变化趋势的抽取具有较强的能力。
5 结束语
通过在目标之间进行剖面分析,获得三维地势的起伏变化信息;通过与目标位置等进行保凸融合,采用Graham 扫描算法,优选出了反映整体地势变化趋势的保凸特征点集;通过设计保凸的Bézier曲线控制点几何构造方法,实现整条曲线的保凸光滑,而且整体空间占有较少。实验结果显示:目标连接曲线拟合地形变化整体趋势,具有优良的保凸性,较好地保证了目标之间连接曲线的整体单凸性,整体单一向下弯曲,形成了空中分布的视觉感知,在一定程度上减弱了高山前后遮挡的影响,避免了视觉上的“S”型扭曲现象等,较好地消除了地形起伏引起的“穿山入地”,极大减轻了视觉感知上的间断性“破碎”感[12]及抖动感等,视觉感知较好。
进一步:(1)研究STK、ECharts、FireEye等软件中的动态特效及光照效果[11],完善可视化动态效果。(2)针对网络作战领域,探索虚拟网络空间与地理空间的混合显示,深入研究地理因素约束下的网络态势可视化。(3)针对军事中作战编队这种特殊群体,借鉴复杂网络社区划分的思想进行挖掘[25],并进一步探索更好的群体关系可视化。(4)针对小范围两点型,可考虑采用边集束[10]技术进一步改善效果等。(5)针对拓扑结构复杂混乱的问题,考虑地形约束,进行布局算法,从而减少边交叉数量,提升视觉美感,需要下一步深入研究。
