基于路线优化的关口表数据无人机自主采集研究
2020-03-08才彦姣隋佳睿陈家昊
才彦姣, 隋佳睿, 陈家昊
(国网辽宁省电力有限公司计量中心, 辽宁 沈阳 110168)
0 引言
蚁群算法(Ant Clony Optimization,ACO)是一种仿生学算法,它由Marco Dorigo 于1992 年提出,其灵感来源于觅食的蚂蚁在寻找食物过程中总能发现一条从蚁巢和食物源的最优路径。蚁群算法是一种群智能算法,由一群无智能或有轻微智能的个体(Agent)通过相互协作而表现出智能行为, 从而为求解复杂问题提供了一个新的可能性,是一种用来寻找优化路径的概率型算法。
关口表数据是电力系统高效运转的重要保障, 随着现代化科技的发展, 关口表数据采集的方式需要改进和完善。现有的人工采集方法存在着精确性、适应性和经济性等方面的不足。
随着无人机技术的快速发展, 现今的无人机已可用于工业及商业用途,由于无人机地勤保障要求低,机动性强, 起降条件和维修保障要求都比较低, 安全风险系数小,因此具有作业方便、成本低、安全可靠等优点。 将无人机技术应用于关口表数据采集过程能大大节约时间成本,提高工作效率和精确性,为自动化数据采集提供了一种新思路。
1 系统总体设计
为了实现对关口表数据采集的自动化和无人机采集路线的优化,本文采用一种基于GPS 和RFID 射频技术的方法进行无人机与变电站之间的定位与数据传输, 采用蚁群算法对无人机采集数据路线进行优化。
无人机与变电站之间的数据采集与定位系统由两部分组成, 无人机通过GPS 卫星网络对每一个要采集数据的关口表所属变电站位置进行方向确认和大致范围确认;用RFID 对变电站进行精准识别和数据收发。同时,该网络系统也可实时监测无人机飞行状态、 工作进度和当前位置,确保自动化采集工作的顺利进行,系统总体结构如图1 所示。

图1 系统总体结构Fig.1 Overall structure of the system
2 定位与数据采集方法
GPS 定位距离远, 如果需要高精度的话使用成本很高,而RFID 可在几百米的范围内定位精确的同时成本也适中。 无人机定位与数据采集方法采用GPS 和RFID 结合进行,先利用GPS 导航定位变电站方向和所在范围,再利用RFID 精准识别、无人机悬停,进行数据传输,定位系统如图2 所示。

图2 定位系统Fig.2 Positioning system
RFID 应用系统由RFID 电子标签、读写器、发送接收信号的天线、通信网络系统四部分组成。 RFID 电子标签能够储存有关物体的数据信息。 将要被读取数据的RFID电子标签安装在便于无人机悬停的变电站建筑表面;再在无人机上安装RFID 读写器, 用于识读提取变电站RFID 电子标签中当前储存的数据信息,将收集的数据再写入总数据库的FRID 电子标签,并于与后台管理计算机进行信息交互; 天线是标签与读写器之间进行传输数据的发射、接收装置;通信网络系统包括数据库服务器和其他信息系统。数据库服务器处理读写器传送过来的信息,其他信息系统根据通过向读写器发送指令, 对电子标签进行相应操作。
3 路径优化算法
3.1 蚁群算法的基本原理
蚂蚁的行走路径表示待优化问题的可行解, 整个蚁群的所有路径构成待优化问题的解集合。 一开始蚂蚁的行走路径是随机的, 蚂蚁在行走的过程中会不断释放信息素,标识自己的行走路径。 在单位时间内,短路径上的蚂蚁数量比长路径上的蚂蚁数量要多, 从而蚂蚁留下的信息素浓度也就越高,随着时间的推进,较短的路径上累积的信息素浓度逐渐增高, 选择该路径的蚂蚁个数也愈来愈多,如图3 所示。 最终,整个蚂蚁会在正反馈的作用下集中到最佳的路径上, 此时对应的就是待优化问题的最优解。

图3 蚁群路线图Fig.3 Ant colony roadmap
蚁群算法通过模拟蚂蚁行为达到计算效果, 主要包括蚂蚁行为的两个过程:状态转移和信息素更新,其具体计算公式如下:
(1)转移概率公式:

式中:α—信息素的相对重要程度;β—启发式因子的相对重要程度;Jk(i)—蚂蚁k 下一步允许选择的城市集合。
(2)启发式因子计算公式:

式中: dij—城市i,j 之间的成本(或距离),dij越小,ηij越大,也就是从城市i 到j 的可见性就越大。
(3)信息素计算公式:
当所有蚂蚁完成一次周游后,各路径上的信息素为:
τij(t+n)=(1-p)·τij(t)+△τij


(4)更新信息素矩阵。
τij(t+n)=ρ·τij(t)+△τij
式中:τij(t+n)—t+n 时刻城市i 与j 之间的信息素浓度;ρ—控制参数;△τij—城市i 与j 之间信息素经过一个迭代后的增量。
3.2 无人机路径优化
设蚁群中所有蚂蚁的数量为m,所有变电站关口表之间的信息素用矩阵pheromone 表示, 最短路径为BestLength, 最佳路径为BestTour。每只蚂蚁都有自己的内存, 内存中用一个禁忌表来存储该蚂蚁已经访问过的变电站,表示其在以后的搜索中将不能访问这些变电站; 还有用另外一个允许访问的城市表(Jk)来存储它还可以访问的城市; 另外还用一个矩阵(△)来存储它在一个循环或迭代中给所经过的路径释放的信息素;还有另外一些数据,例如一些 控 制 参 数(α,β,ρ,Q),该 蚂 蚁行走完全程的总成本或距离(TourLength),等等。 假定算法总共运行N 次,运行时间为t。 路径优化算法流程图如图4 所示。
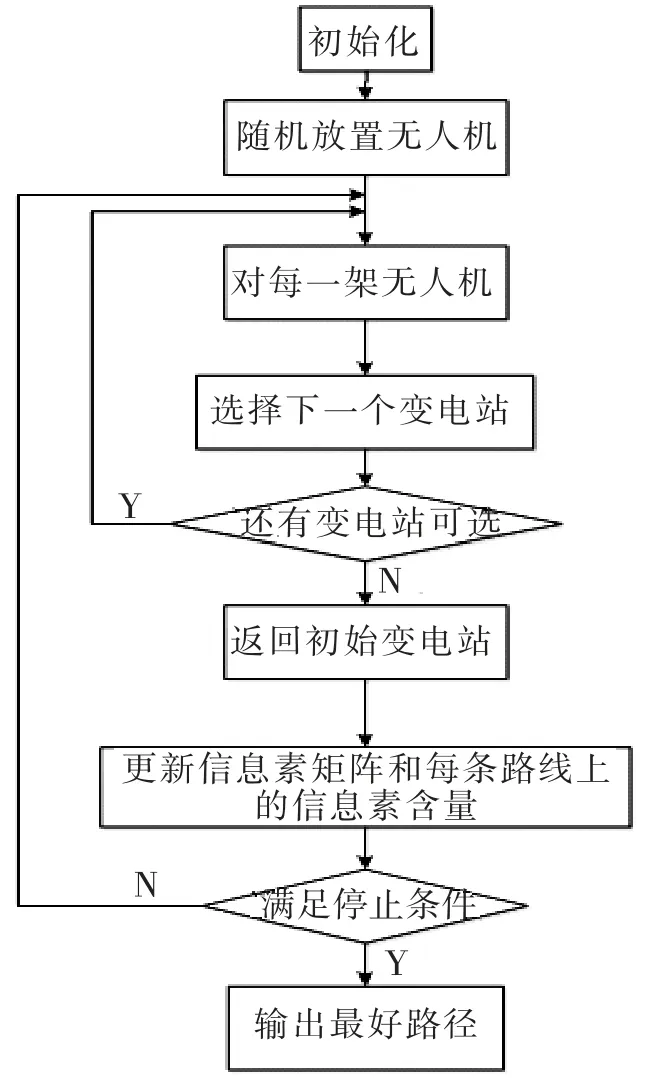
图4 路径优化算法流程图Fig.4 Flow chart of path optimization algorithm
4 结论
本文采用GPS 和RFID 应用系统对变电站所在位置进行精确定位, 先采用GPS 对变电站所在区域范围进行大致确定, 再利用RFID 射频技术进行变电站的精确定位,无人机精确悬停在变电站外表面的RFID 电子标签上方,通过机身安装的读写器与电子标签进行数据交互,达到采集数据与发送数据的目的。 无人机飞行规划路线通过蚁群算法优化,得出最佳采集路线,无人机工作时间的飞行状态与实时位置可通过移动设备显示, 保证采集工作的顺利进行。 该数据采集系统可实现采集工作的高度自动化,为数据采集的高效性、安全性、高效性提供了新的保障。
