机器人第六轴与示教旋转角度互补问题的处理
2020-03-05孔一君周云鹏冯晓鹏
王 辉,梁 杰,孔一君,周云鹏,冯晓鹏
(1.郑州大华机电技术有限公司,河南郑州 450001;2.河南机电职业学院,河南郑州 451191)
0 引言
郑州大华机电技术有限公司是一家从事生产智能化、信息化自动生产线的企业。尤其以超硬材料、超硬磨具和超硬工具的智能化产线整体方案而知名。
在郑州大华承担的某智能产线的机器人搬运粉末冶金成形块工位上,搬运过程中,从机器人目标点A 到点B,除了X、Y 和Z 三个坐标值的变化,其四元数q1、q2、q3和q4也发生改变。一组四元数可对应三个欧拉角、和。工程师进行点位调试时,出现了如下问题:示教机器人目标点B 时,用直线运动的方式把工具末端示教到相应位置后,用单轴运动的方式使第六轴旋转30。然而在调试运行时,从A 到B 的过程中,第六轴旋转330,虽然也能到达示教的姿态,但是走的不是预想的轨迹,同时也影响生产节拍。
1 原因分析
项目使用的是ABB IRB 2600-12/1.65 工业机器人,此型号机器人具有工作范围大,占地面积小,安装灵活的优点[1]。物理参数:底座尺寸676 mm511 mm,机器人高度1328 mm[2]。规格工作:范围1.65 m,有效承重12 kg,防护标准IP67[3]。性能:重复定位精度0.05 mm,轴运动工作范围:轴1 为-180180,轴2 为-95155,轴3 为-18075,轴4 为-400400,轴5 为-120120,轴6 为-400400[4]。
2 问题解决方法
改变轴配置参数有2 种方法,使用示教器方法和robotstudio 方法,二选一即可。
根据现场需要把值加4 或减4,表示第六轴的配置增加或减少了4 个象限,也就是360。在此案例中cf6 从-1 改为3,如图2 所示。确认后就解决了本案例的问题。
(2)软件robotstudio 的方法。在Rapid 程序中,在程序模块的下方和例行程序的上方的声明里找到类型为robtarget 的P10点的参数,把第三个方括号中的第三个参数cf6 直接加4 或减4。然后把修改全部应用到控制器里,如图3 所示。同样能解决本案例中的问题。
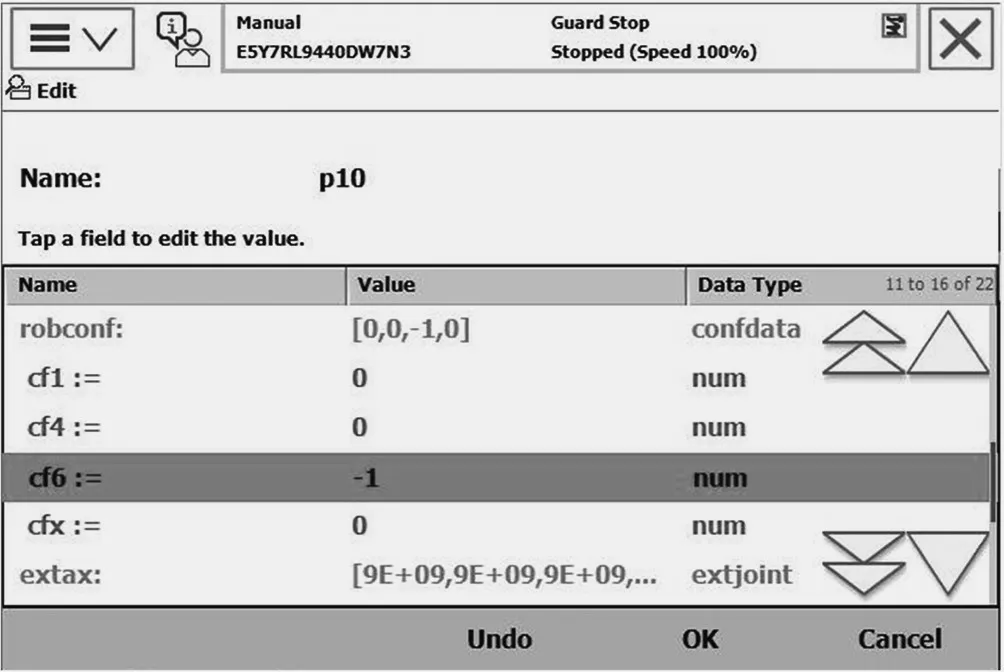
图1 修改前的cf6 值
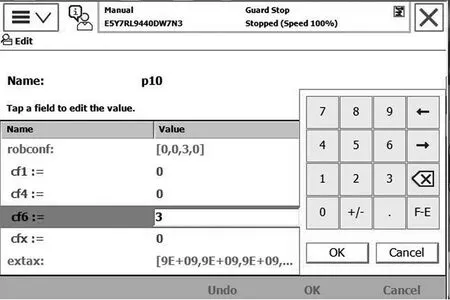
图2 修改后的cf6 值

图3 robotstudio 中修改的cf6 应用到控制器中
robotstudio 软件中的修改方法更接近于底层,缺点是没有示教器中的方法直观,优点是减少机器人的停机时间,更适合于工业机器人工程师使用。而示教器中的修改方法适合于现场操作人员和初学者使用。应根据实际情况选择相应的方法。
3 结束语
现场操作人员要善于发现问题和描述问题,机器人工程师需要对工业机器人的基本概念有深刻的理解,才能在工作现场游刃有余。两者相互配合才能尽快维修好设备,减少产线停车时间。
