弧焊机器人焊缝跟踪系统在实践教学中的应用
2020-03-05徐江波姚启明高党寻王龙兵周冰科
徐江波,姚启明,高党寻,王龙兵,周冰科
(清华大学基础工业训练中心,北京 100084)
0 引言
目前,工业机器人主要通过人工示教的方法进行工作,工作环境发生改变时,需重新进行示教,不能实现自动化控制功能。因此,对基于机器视觉的机器人跟踪技术进行研究和探索,以期能够有效提高机器人自动化程度。同时针对本科金工实习和工程素质教育的要求,可以一方面与现代科技发展同步,另一方面重点培养学生的实践操作能力。以KUKA-KRC4 弧焊机器人(图1)为例,对激光焊缝跟踪器的原理、系统论述及课程应用等方面进行深入探讨和剖析,学生通过对弧焊机器人焊缝跟踪系统的学习,能够很好地感受焊接技术的先进性和当前工业的发展,从而激发参与焊接实践的兴趣,达到锻炼学生创新思维和实践动手能力的目的。
1 功能原理

图1 KUKA-KRC4 弧焊机器人
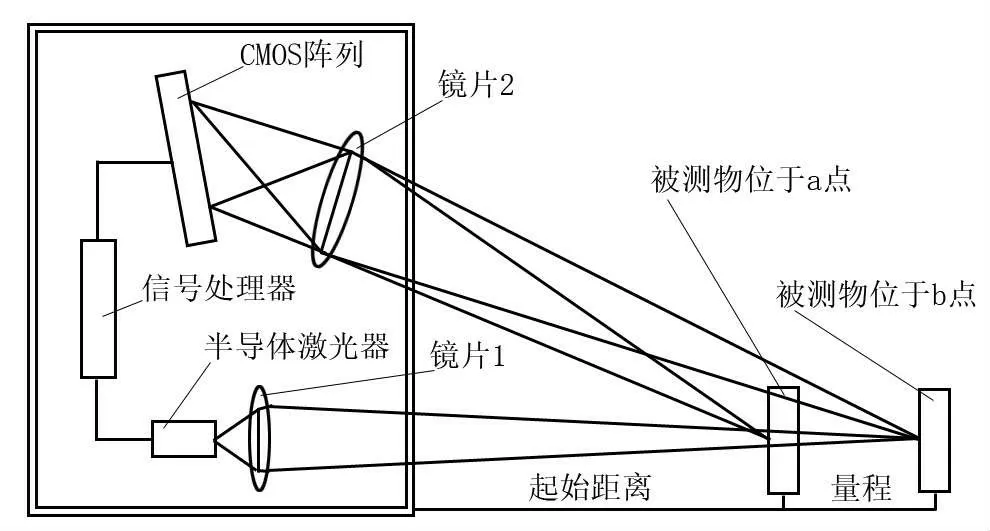
图2 激光焊缝跟踪器原理
如图2 所示,半导体激光器发出的光,经透镜1 形成XZ 平面光幕,并在被测物上形成一条轮廓线,镜片2 收集被测物体反射回来的光并将其投影到二维CMOS阵列,这样形成的目标物体剖面图形被信号处理器分析处理,得到被测物的2D轮廓线。轮廓线的长用X 轴计量,高用Z 轴计量。如果在此基础上扩展一个垂直于XZ 平面的一个运动的Y 轴,即可得到物体表面的3D 图像。
2 焊缝跟踪系统操作流程
2.1 启动焊缝跟踪系统软件
软件启动后的界面如图3 所示。以拼接焊缝为例,进行具体讲解。
(1)将机器人移动至焊接区域选择参数,段个数选择16,手动输入参数11。
(2)选择模式1,轴1 对应反方向(水平),轴2 对应正方向(垂直)。
(3)校准,点击“校准”按钮前,要保证激光线尽量垂直于焊缝(误差5),焊枪的出丝位置对准焊缝,IO 水平与垂直,对准输出选中。
(4)写入参数,注意有焊点点击滤波32。
2.2 常见焊接类型及焊缝形式跟踪模式
(1)可支持焊缝类型见图4。
(2)焊接形式跟踪模式见图5。

图3 焊缝跟踪系统工作界面

图4 常见焊接类型
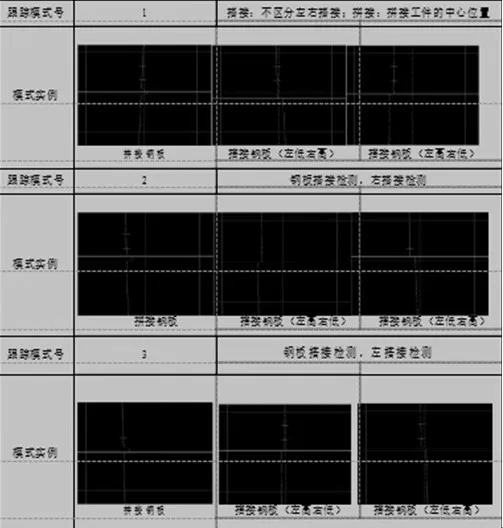
图5 焊接形式跟踪模式
3 机器人焊缝跟踪系统在焊接实践教学中的应用
在进行弧焊机器人实践教学环节的同时,加入焊缝跟踪系统的学习,能有效激发学生的创造力,提升学习的趣味性和挑战性,锻炼和提高学生实际操作弧焊机器人的能力,达到理论与实践相互结合的效果。而学生通过具体学习和实际锻练,不但能够熟练掌握搭接、拼接等焊缝跟踪的操作能力,还能学会设置和修改其基本参数等重要知识点(图6)。
通过此实践教学内容的学习,激发了学生的学习兴趣,使学生在掌握传统焊接方法的前提下,对于先进弧焊机器人加深了认识、提高了操作能力。因此,该环节必须注重实践操作在整个教学环节中的比重,积极引导学生在学习实践中以团队的方式进行深入探讨与交流,提升学生工程素质的培养,增加学习的趣味性和挑战性。

图6 学生操作机器人焊缝跟踪系统
4 结语
机器人焊缝跟踪系统的应用,可以降低成本,无需高精度工装实现一致的和可复现的连接。对于复杂的焊件,可减少编程工作。在教学方面,能够充分激发学生创造力、想象力与实践动手能力;提升教学的吸引力、说服力和影响力;进而提高弧焊机器人实践教学的实效性。这种创新的实践教学模式效果显著,受到了学生的普遍欢迎。
