素描工业机器人末端夹持器的改进
2020-03-05岳宗平张艳艳冯晓鹏
梁 杰,岳宗平,张艳艳,冯晓鹏
(1.郑州大华机电技术有限公司,河南郑州 450001;2.河南机电职业学院,河南郑州 451191)
0 引言
素描工业机器人工作站主要包括拍照、图像处理、数据传输、素描4 个部分[1]。图像处理是对照片进行旋转变换、伸缩变换、轮廓提取和线条打散后,把散点数据通过有线或无线的方式传送至工业机器人控制器[2-5]。素描工业机器人把散点作为以中性笔为工具坐标的工业机器人目标点,中性笔到达目标点的过程中完成线条绘制。在作业过程中,中性笔要于2 min左右的时间内,在数千个机器人目标点之间进行平面偏移和上下偏移。
1 问题概述
当前绘制时,存在以下问题:现用夹持器垂直夹持中性笔,绘画时,笔尖与纸面垂直接触,与人类握笔时姿势差别较大,以致动作生硬,人机协调性较差。
2 原因分析
人手在书写和绘图时,笔与纸面不是垂直的关系,而是成一定的角度。而机器人的夹持器用于安放中性笔的夹持器的中心孔轴线与纸面垂直,从而使素描作业时中性笔与纸面垂直,如图1 所示。
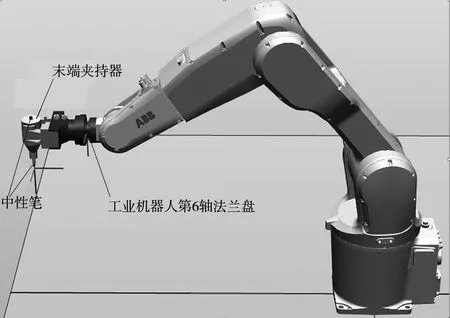
图1 带夹持器的素描机器人
虽然通过变更机器人目标点姿态的方法也能达到线条绘制流畅的效果,但是最便捷的方法是把夹持器上的中心孔加工成斜孔,来代替垂直孔。斜孔的加工难度,与垂直孔相比,略有增加。斜孔的中心线与纸面在空间坐标系里与各平面的夹角以人手握笔的习惯为宜。
为增加笔触纸面的弹性,在斜孔与中性笔之间可以设置垫圈,垫圈材料的弹性较大,垫圈壁上可设置一个贯通的缝隙,缝隙与斜孔中心线平行,用于安放中心笔的同时,还能起到与夹持器上斜孔配合时调隙。
项目使用的是ABB IRB 1200-7/0.7 工业机器人,此型号机器人可直立、倒置或壁挂安装。物理参数:底座尺寸210 mm210 mm,机器人重量52 kg。规格:范围1.65 m,有效承重12 kg,防护标准IP40。性能:重复定位精度0.02 mm,轴运动工作范围,轴1(-170170),最大速度288/s,轴2(-100135),最大速度240/s,轴3(-20070),最大速度300/s,轴4(-270270),最大速度400/s,轴5(-130130),最大速度405/s,轴6(-360360),最大速度600/s。
3 改进方法
加工出的通孔中心线不与工业机器人基坐标的X 轴和Y轴垂直,也不与Z轴平行,通孔的中心线与X 轴的夹角为,与Y 轴的夹角为,与Z 轴的夹角为,如图2 所示。
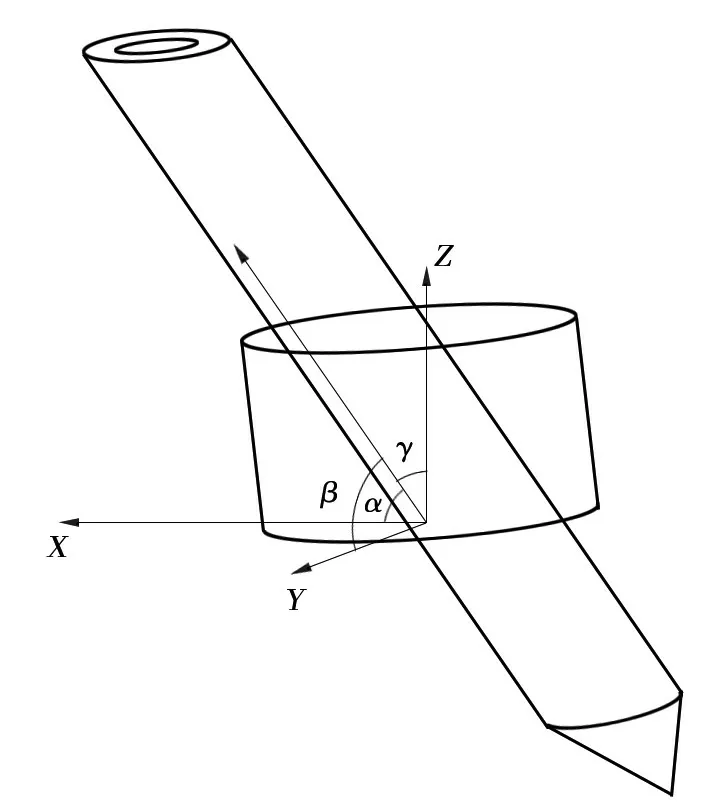
图2 斜孔与各坐标轴的夹角
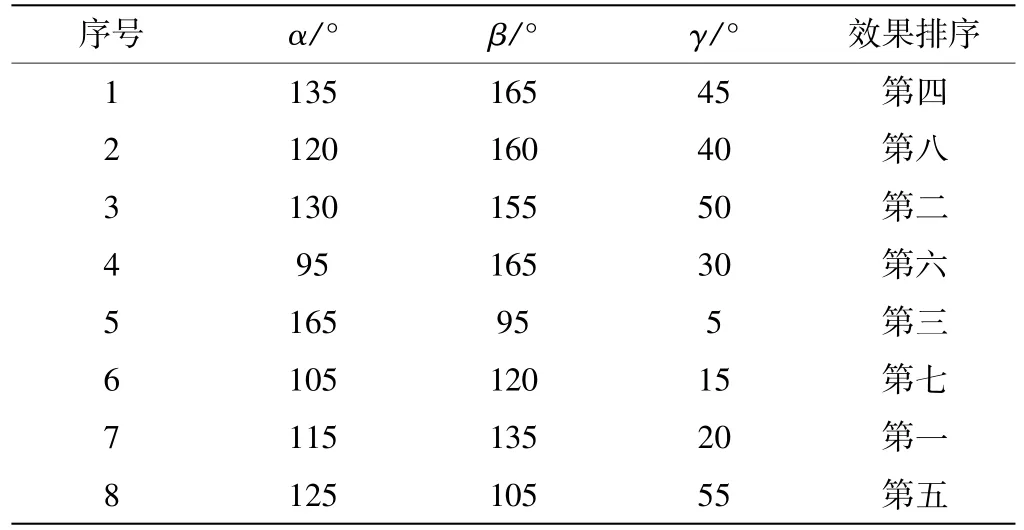
表1 制造夹持器的8 组夹角值及素描效果排序
把包括夹持器和中性笔在内的执行器安装在ABB IRB1200 型工业机器人第六轴法兰盘上,如图2 所示。试验用的素描工业机器人位于河南机电职业学院工业机器人培训中心。标定工具坐标系后的素描作业中,动作更符合人类握笔绘画习惯,动作不生硬,有利于人机协调。
4 结束语
在项目设计阶段,要充分考虑到是否能以略微增加夹具加工成本的方法,代替后续调试过程中时间成本的方法,以期减低总成本。
