面向基建验收的机载激光电力线路识别*
2020-03-04王和平孙怀木谭弘武
邹 彪 王和平 孙怀木 谭弘武 杨 鹏
(国网通用航空有限公司 北京 102213)
1 引言
电力线路的基建验收,需要对线路进行量测和分析,获取相间距和弧垂等线路数据[1]。这些现场检测工作需要耗费大量人工,难度较大,尤其在复杂地形上,常常需要耗费大量时间。相比之下,机载激光雷达(光探测和测距)可以直接采集电力线走廊的高精度三维点云数据[2]。尽管如此,电力线路通常靠近植被和建筑物,机载激光雷达数据量较大,难以准确快速地从激光雷达点云中提取电力线点[3]。因此,从机载激光雷达点云数据中提取电力线的高效,快速和自动化方法的研究和开发是一个至关重要的课题。
2 相关研究
传统的电力线提取技术主要包括:1)基于高度,密度或脉冲数的点云统计分析等[4];2)基于二维图像处理的霍夫变换和聚类[5];3)基于点与分布特征之间的监督分类[6]。
文献[7]提出使用二维霍夫变换来检测分段的电力线基元。采用随机采样一致性算法对电力线进行整体重构,选取用于估计垂直参数的电力线基元。由于该方法没有充分利用所有电力线数据,因此数据点分类和识别的准确率分别为91.04%和89%。文献[8]引入了一种利用脉冲返回的局部点密度和强度的树和电力线识别方法。该方法采用基于知识的监督分类方法,分别通过拟合XOZ或YOZ平面,分两步将电源线与背景分开。文献[9]提出了一种基于地面过滤算法和霍夫变换的电力线路走廊分类方法。文献[10]利用电力线的空间分布从点云中提取单条电力线,然后直接利用基于多项式的最小二乘匹配算法估计其三维重建的电力线模型参数。文献[11]提出利用悬链线的非线性调整来检测电力线候选点。这种方法计算复杂,最终拟合的线路模型也不连续。文献[12]设计了基于车载激光雷达点云数据特征的城市电力线路提取算法。文献[13]基于一组标准(例如高度、密度)以及考虑了几何特性的基于2D图像的处理技术,设计了专注于统计分析的电力线自动提取模型。电力线路识别的平均准确率为93.26%。然而,在复杂的城市场景中,树木和建筑物靠近电源线的地方,准确度会降低。
综上所述,机载激光雷达点云数据有可能克服传统线路验收现场工作的不足。但是有必要设计一种从数据点云中提取电力线的智能识别算法。因此本文提出了一种电力线识别方法,适用于电力线走廊中植被、建筑物和输电线路混杂的复杂场景。
3 电力线路识别算法框架
本文设计了基于几何多尺度特征和多尺度邻域类型的电力线点云分类方法。该方法的主要组成部分包括:1)电力线候选点过滤;2)邻域选择;3)特征提取;4)支持向量机的识别。算法流程如图1所示。

图1 算法框架
3.1 电力线路候选数据点过滤
进行电力线识别的第一步是对原始激光雷达点云进行电力线候选点过滤[14]。首先是进行地面点的分类和数字地面模型(DTM)的生成。地面数据点识别的第一步是对采集的数据集中存在缺失的数据进行填补,之后是创建地面网格,通过逐渐增大窗口大小的形态来移除地面上的物体。数据集中的一个共同问题是异常值的存在,这些异常值远高于或低于其周围地区。在形态学开放的表面可以去掉更高的异常值,而更低的异常值则不能。因此通过检测较低的异常值的方法填充地面。移除树木和异常物后,下一步是去除大型人造物体,如建筑物。一种算法被设计成使用逐渐增大的窗口尺寸来移除建筑物并且避免切割地形特征。最后,从近似表面提取地形点并产生DTM。然后选择所有的点距离地面4m作为电力线候选点。
3.2 邻域选择
使用局部三维空间拓扑结构围绕考虑的三维点X进行电力线分类,并初步考虑了三维点的邻域类型:单标度邻域和多尺度邻域。在每个尺度上,对球形、圆柱形和k邻域等不同的邻域类型进行试验和比对。每个邻域由一个单一的尺度参数定义,例如半径、k值或者最优邻域特征值[15]。经过多次试验,本文选择了多尺度的球形邻域来捕捉电力线拓扑结构的各向异性和细节。
3.3 拓扑特征提取
电力线点的成功识别取决于可以区分电力线和其他物体的有用特征的提取[16]。表征电力线路的测量特征和分布特征已被广泛用于各种应用。本文基于上下文信息提取特征以提高电力线分类准确性。
3.4 SVM分类
使用支持向量机(SVM)对电力线点进行分类。基于局部个体点邻域的提取特征是支持向量机(SVM)分类器的特征向量。支持向量机(SVM)是一种监督分类方法,需要训练数据集来校准分类器。为了校准和验证分类器,我们从数据集中手动确定了真正的电力线点,并使用五重交叉验证来评估分类器的准确性。
4 仿真试验
4.1 数据集
使用的数据集来自贵州城郊某220kV输电线路。数据集是在2016年获得的,如图2所示。
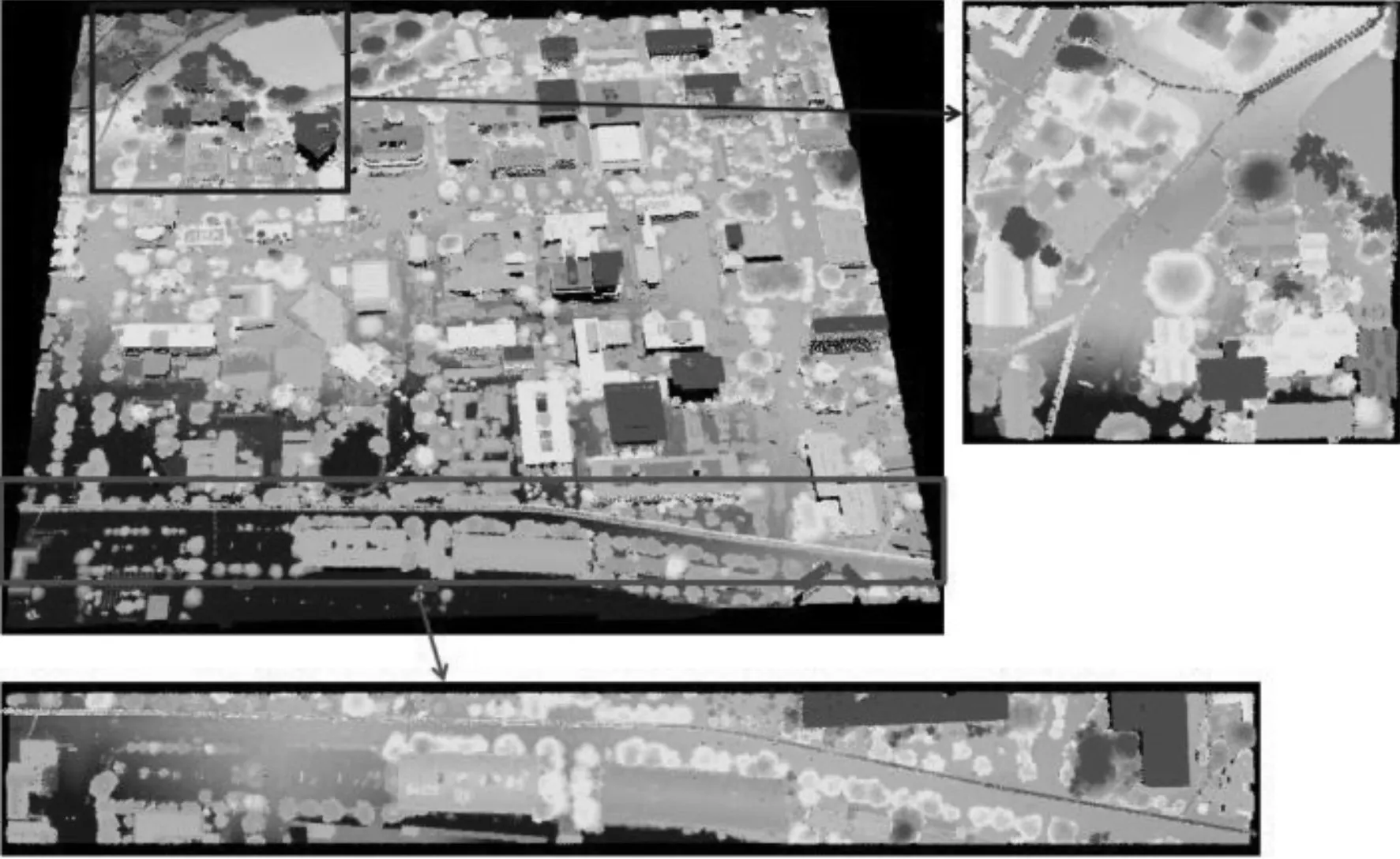
图2 真实电力线路的数据点云识别试验
图2 是由左上角区域(UL数据集,180×180m2)和下部区域(LP数据集,800×100m2)组成的大型机载激光采集场景。数据集中的点密度约为3.42点/m2。在UL数据集和LP数据集,都采用针对电力线路的逐点标记形式提供地面实际状况。表1中给出了电力线标记3D数据点的数量。
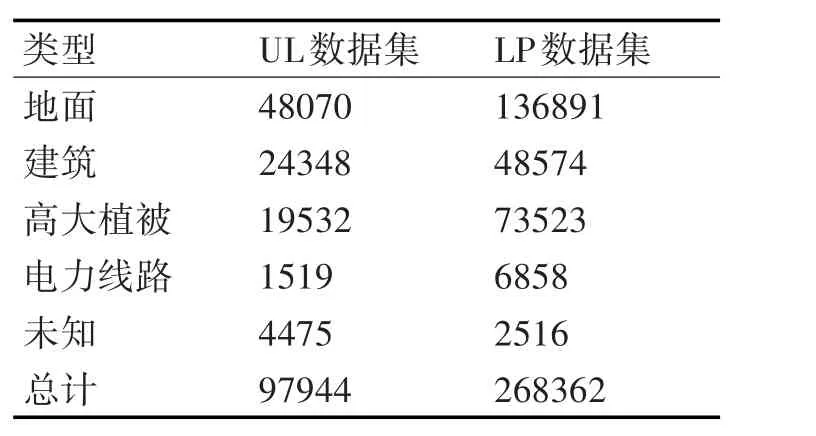
表1 图2所示数据集中不同类型3D点的数量
4.2 试验
试验中使用单尺度和多尺度邻域定义作为地理空间拓扑特征提取的基础:1)六个球形单尺度邻域,记为 N1m、N3m、N5m、N7m、N9m和 N11m;2)多尺度邻域,表示为由球面邻域 N1m、N3m、N5m、Nm、N9m和 N11m。所得到的特征连接到特征向量并作为SVM分类器的输入提供。
为了比较不同方法得到的分级结果,本文采用了以下几个评估电力线路识别算法的参数:准确率(PREC);召回率(REC);kappa系数(k)。PREC,REC和k计算如下:

其中TP为电力线真正的总和,FP为电力线误报的总和,FN为电力线的假阴性总和,N为电力线候选点的总和。
4.3 结果
由于使用了七种类型的数据点和两个数据集,共进行了14次实验。表2中示出了每个实验的精确率(PREC),召回率(REC)和kappa系数(k)的值。

表2 不同邻域定义的两个数据集的PREC、REC和k(%)
试验结果表明,在UL数据集的6个单尺度邻域中,N7m的性能较好,而N11m在LP数据集中性能较好。主要原因是UL数据集的电力线比树木和建筑更接近于LP数据集。但LP数据集的准确性从邻居N7m逐渐增加到N11m。多尺度邻域中所有N都具有比任何单尺度邻域更高的kappa系数统计量,因为它包含了所有单尺度拓扑结构特征,但是识别结果的覆盖率却不如精确率高。
5 结语
本文的创新之处在于利用多尺度邻域表征电力线路的空间拓扑进行分类。本文通过不同尺度的局部邻域的特征提取和分类进行逐点的个体三维点拓扑特性。试验数据集来自电力线靠近植被或建筑物的地区。尽管面积的复杂性,我们的方法仍然可以达到较高的分类精度。
在三类邻域(球形,圆柱形,k最近邻域)中,我们发现基于特征值的圆柱形和k最近邻域表现不如球形邻域。在实验中,电力线路距离地面约4m,间距约2m,总宽度5m。通过试验发现在UL数据集和LP数据集中,单尺度邻域的更好半径是5m或7m。这些最佳比例近似于电力线的水平或垂直跨度。由于环境的空间异质性,多尺度邻域的识别效果更好。
