结合空化微泡母小波变换的高空化噪声比超快速主动空化成像方法∗
2020-03-03田淑爱田志鑫
田淑爱 丁 婷 田志鑫 杨 录
0 引言
聚焦超声治疗[1−3](Focused ultrasound surgery, FUS)是利用超声束良好的方向性、可穿透性和可汇聚性,将体外超声聚焦到体内靶病变区域,通过热效应、空化效应和机械效应等达到治疗效果。其中空化效应是肿瘤热消融、体外碎石.、超声溶栓以及超声药物控制释放等超声治疗的关键机制。为了控制和利用空化效应以实现FUS的高效精准治疗,必须对FUS过程中的声空化进行监控成像。
目前,现有的声空化检测和成像的方法主要是光学法和声学法。光学法主要是通过高速/超高速摄影[4−5](High-speed photography, HSP)、声致发光[6−7](Sonoluminescence, SL)以及声致化学发光[8](Sonochemiluminescence, SCL)和光衰减法等。光学方法可以直观记录空化泡的行为和时空动态分布,但对于某一断层面的空化分布无法给出具体信息,且受限于透明介质。声学法包括主动空化成像[9](Active cavitation imaging, ACI)和被动空化成像[10](Passive cavitation imaging, PCI)。Farny 等[11]和Gyongy 等[12]使用线阵换能器,线阵阵元不发射只接收的方式进行数据采集空化信号,然后通过波束合成算法计算时间能量进行二维重建得到被动空化成像,然而对于提供准确的空间位置信息的一级重建算法有待提升。主动空化成像包括普通B 模式空化成像和超快速空化成像方法。由于声空化具有瞬态特性,普通B 模式超声成像采用逐线扫描模式,成像速度较慢,无法捕获空化微泡瞬态特性。Gateau 等[13]提出了一种超快主动空化成像(Ultrafast active cavitation imaging, UACI)技术,该技术采用高帧速率的平面波发射模式,但是基于平面波的空化成像质量较差,需要依赖于后端波束合成算法以改进图像横向分辨率和信噪比。目前常用的后端波束合成算法包括延迟叠加(Delay-and-sum, DAS)算法、最小方差(Minimum variance, MV)算法和相干系数最小方差(Coherence factor based minimum variance,MVCF)算法。
空化微泡母小波(Cavitation bubble wavelet transform, CBWT)技术是近年来提出的一种新型平面波超快速超声空化主动成像方法,它可在保留平面波高帧频低能量的同时,提高空化噪声比(Cavitation-to-noise ratio, CNR)。Liu 等[14]利用RPNNP 模型构造母小波,并且用波束合成后的信号进行小波变换得到空化图像。Bai 等[15]基于特征空间的脉冲反转次谐波和超快速超声空化成像相结合,保证了波束合成图像的质量,提高了图像的分辨率。黄玉蓉等[16]在超声诊断的造影成像中利用Doinikov 模式构建造影微泡母小波,先进行连续小波变换,再由小波系数代替原始回波信号,最后对其进行后续波束合成得到造影图像。本文提出一种结合CBWT、波束合成和平方差值求和减影(Sum-of-squared differences,SSD)的超快速主动空化成像方法,以获得高质量的空化图像。首先,采用基于平面波的超快速超声空化主动成像方法,获取空化微泡原始回波信号;其次,基于RPNNP模型构建空化微泡母小波,并对空化微泡原始回波信号进行连续小波变换;再次,对获取的小波系数进行多种波束合成算法,并结合SSD 减影算法,提高空化图像质量。为验证方法有效性,本文讨论了CBWT、3种波束合成算法(DAS、MV、MVCF)以及SSD数字减影算法对空化图像CNR 值的影响,实验结果表明CBWT-MVCF-SSD空化图像最优,其CNR值比DAS空化图像高31.73 dB。
1 实验系统
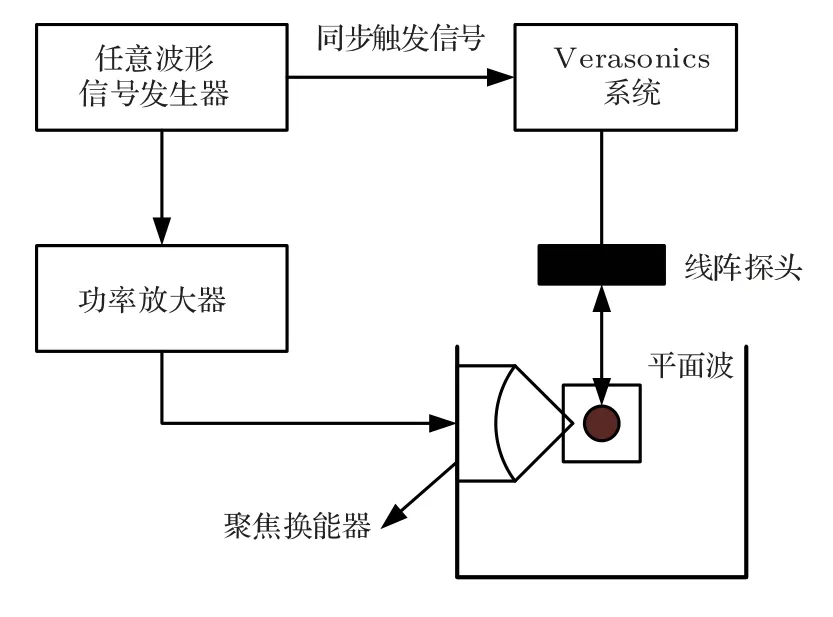
图1 基于超快速主动空化实验系统示意图Fig.1 Schematic diagram of the ultra-fast active cavitation experiment system
实验系统包括聚焦超声系统和Verasonics 平面波超声采集系统两部分,两者之间通过一个任意波形发生器进行时序控制。如图1所示,聚焦超声换能器固定在透明有机玻璃水槽(50 cm×40 cm×30 cm)的侧壁,水槽中充满自来水,并保持在室温(20◦C±2◦C)。水槽壁和底部放置有吸声材料,用以减少聚焦超声声束的多次反射干扰。聚焦超声系统是由聚焦超声换能器和功率放大器构成。聚焦超声换能器是单阵元凹面探头,其中心频率为1.2 MHz,孔径150 mm,聚焦超声声功率为72 W。聚焦超声作用时间是1 ms,作用停止后触发信号输入到Verasonics 系统时,选择的线阵探头的中心频率为5 MHz,带宽为80%,阵元数为128,采样率为40 MHz,发射并接收平面波信号,采集得到空化微泡原始回波信号,该回波信号在数值仿真软件中进行处理。
2 研究方法
本文提出结合CBWT、波束合成和SSD 减影的超快速主动空化成像方法,如图2所示,给出了本文3 部分算法:CBWT 算法、波束合成算法(DAS、MV和MVCF)以及SSD数字减影。
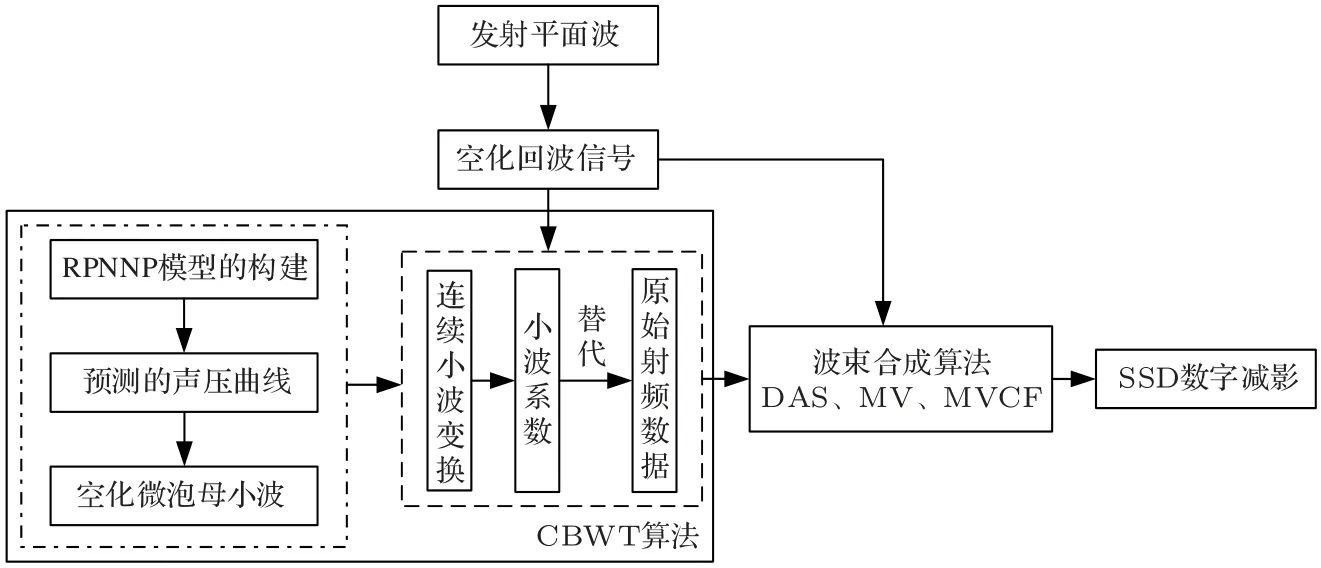
图2 CBWT 结合波束合成以及SSD 数字减影研究流程图Fig.2 CBWT combined beam synthesis and SSD digital subtraction research flowchart
2.1 基于平面波的空化微泡母小波技术
2.1.1 构建空化微泡母小波
本文所研究的空化微泡属于无包膜的自由气泡,并且假设初始微泡是静止不动,微泡振动过程中一直保持球形而没有形状改变的理想状态。RPNNP 模型[17]假设符合这一理论,其模型表达式为
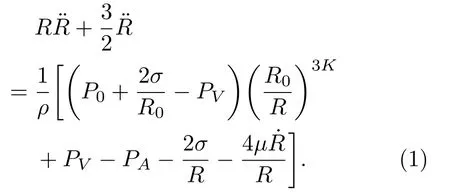
利用四阶Runge-Kutta 方法对与时间有关的半径进行数值求解,可以得到微泡振动半径随时间的变化曲线R(t)。振动微泡辐射出的声压曲线P(t)计算公式如下:

其中,r是驱动声压到微泡中心的距离。
在常温20◦下,在液体水中的RPNNP 模型中各符号的含义以及仿真需要的参数如表1所示。根据空化泡尺寸分布[18]相关研究,这里将初始半径设置为1.0 µm。
通过对公式(1)和公式(2)求解,可预测出空化微泡回波声压曲线,如图3所示。将预测的声压曲线P(t)进行归一化,作为空化微泡母小波。声学参数是平面波传输的声场分布参数,驱动声压是实际测量值,如图3(a)所示。
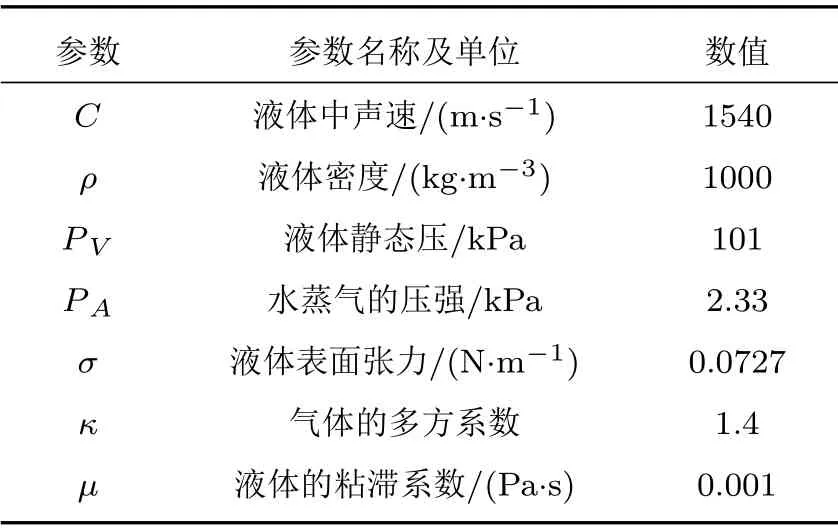
表1 RPNNP 模型中符号的含义与仿真计算时使用的参数Table 1 Meaning of symbols in RPNNP model and parameters used in simulation calculation
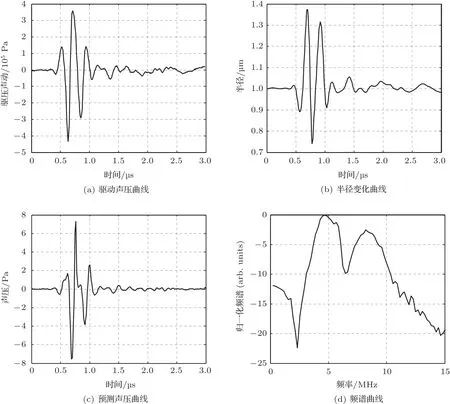
图3 空化微泡RPNNP 模型仿真结果图Fig.3 Simulation results of cavitation microbubble RPNNP model
2.1.2 空化微泡母小波技术
本文采用基于平面波超快速超声空化主动成像,平面波高帧频采集到空化回波信号E(t),将空化微泡母小波φ(t)作为小波基,对回波信号E(t)进行连续小波变换。关于回波信号E(t)的连续小波变换可以定义为

基于空化回波信号与构建的空化微泡母小波具有相关性,本文将两者进行连续小波变换,其实质是将尺度变化下的空化回波信号与空化微泡母小波信号进行卷积运算,得到一系列关于尺度的小波系数,小波系数将代替原始回波信号。本文参考Liu等[14]的相关研究,将小波尺度设置为23。
2.2 波束合成算法
平面波发射的不聚焦性,导致空化图像质量降低,为了提高CBWT 后的图像质量,需要后端进行波束合成。本文采用DAS、MV 和MVCF 三种波束合成算法,DAS算法是通过对不同信道接收的回波信号进行特定的延迟再叠加求和,得到目标点的聚焦信号;MV 算法是在回波信号没有失真的情况下,在特定方向上输出能量最低,得到最优的加权值。
MVCF[19]波束合成是在最小方差的基础上加入相干系数,进一步提高了图像质量。选取目标点并根据目标点位置计算波束合成的有效阵元数大小,记为M。根据目标点位置对M个阵元通道信号计算延时,得到延时后的信号,记为X(t):

把阵元数为M的阵列分为长度为L的子阵,子阵的总数为M -L+1,计算X(t)空间平均相关矩阵R(t):

用R(t)+γI来代替R(t),实现对角线加载,其中I为单位矩阵,γ=∆·trace{R(t)},trace{R(t)}为相关矩阵的迹,∆为算法加入的空间噪声与信号功率比。取a为单位向量,并用式(4)的R(t)计算最优加权系数w(t):

计算X(t)的相干系数(Coherence factor, CF),CF定义为相干方向的能量与阵元信号总能量的比值:

2.3 SSD数字减影算法
数字减影是一种基于B 超视频数据的处理方法,通过减影法可以消除两幅图像之间的差异,从而消除了背景噪声带来的高回声影响。本文采用平方差求和数字减影算法,即SSD 数字减影算法,计算公式如下:
其中,In(z,x)、Ib(z,x)分别表示聚焦照射不同时间的B 超图像,z为深度,x为扫描方向,n为计算的窗宽。
3 结果与讨论
图4是尺度为23 时CBWT 前后3 种波束合成算法空化图像对比结果。图4(a)是空化原始数据直接成像效果图。图4(c)、图4(e)和图4(g)是CBWT前,3 种不同的波束合成算法对图像的质量的影响,DAS 和MV 波束合成算法周围噪声影响较大;MV 算法提高了空间分辨率,但是没有提高对比度;MVCF 算法是在MV 算法基础上加入了相关系数,图像空间分辨率和对比度均有所提高,空化图像质量最佳。图4(d)、图4(f)和图4(h)是CBWT后,CBWT 技术结合3 种波束合成算法后的空化图像。将图4(d)、图4(f)和图4(h)与图4(c)、图4(e)、图4(g)进行比较,图像的噪声有所减少,空化图像质量有所提高,说明CBWT 对周围组织和噪声有抑制作用。CBWT 是应用小波变换的解相关算法,将预测的回波信号与空化信号进行小波变换构建空化微泡母小波,得到的小波系数与原始的回波信号具有很高的相似性。波束合成算法效果中,在CBWT 前后,MVCF 算法最佳,整体最佳效果为CBWT-MVCF。
空化噪声比(CNR)是评价空化图像质量的重要指标,其表达式为

其中,Icavitation指的是ROIs 区域空化的平均强度,ROIs 区域选择为空化微泡区域;Inoise指的是同等面积大小下周围噪声的平均强度。
表2是CBWT 前后空化图像CNR 值的对比。通过表中的数据发现,使用CBWT 后,进行波束合成对于图像CNR有一定提升。DAS算法的CNR值提高了0.27 dB,MV算法的CNR值提高了0.36 dB,MVCF算法的CNR值提高了1.17 dB。CBWT中构造母小波与空化微泡信号的相关性较高,CBWT 技术抑制了周围噪声和组织信号。通过研究分析,在CBWT后,CBWT-MVCF效果最佳,空化图像质量较好。
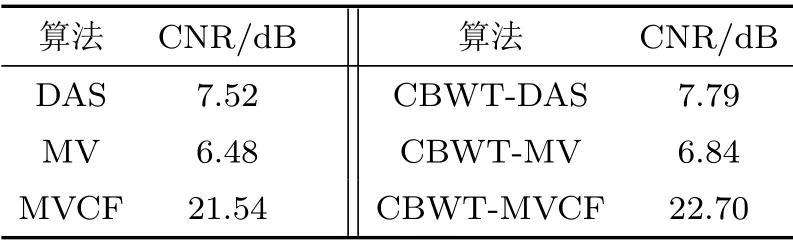
表2 CWBT 前后空化图像的CNR 值Table 2 The CNRs of cavitation images before and after CWBT
图5是CBWT 对于3 种波束合成算法结合SSD 减影图像的对比,图5(a)、图5(c)和图5(e)是CBWT 前波束合成进行了SSD 数字减影,图5(b)、图5(d)和图5(f)是CBWT后波束合成进行SSD 数字减影。SSD减影算法很大程度上抑制了周围组织和噪声,图像分辨率得到提高,进一步提高了空化图像的质量。
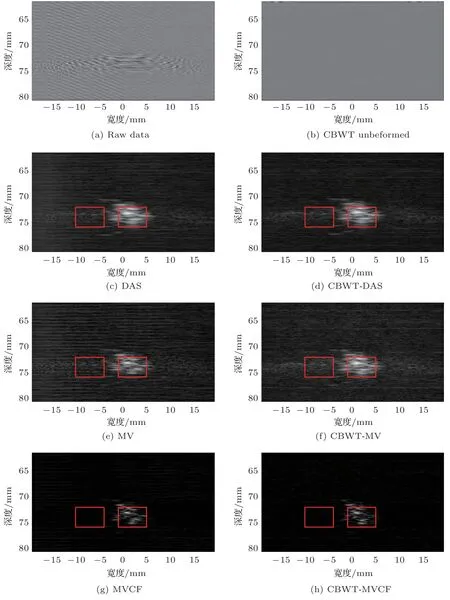
图4 CBWT 前后不同波束合成算法空化图像对比Fig.4 Comparison of cavitation images with different beam synthesis algorithms before and after CBWT
将SSD 数字减影后的图像与DAS、 MV、MVCF 空化图像进行对比,SSD 数字减影算法在消除了背景噪声后的图像明显优于只单独进行波束合成算法时的空化图像。CBWT 结合波束合成算法与数字减影算法处理后的空化图像,去除背景噪声的干扰,空化图像的质量同样优于只进行波束合成算法的空化图像。但与波束合成后进行数字减影的图像效果差异较小,所以本文图像质量评价指标参考表3中CNR值。CNR值显示CBWTMVCF-SSD效果最佳。
表3是结合CBWT 和SSD前后空化图像的CNR值。通过与表2进行比较,DAS-SSD、MVSSD 以及MVCF-SSD 三种算法,CNR 值分别提高了15.99 dB、13.51 dB、10.19 dB;CBWT-DASSSD、CBWT-MV-SSD、CBWT-MVCF-SSD 三种算法,CNR 值分别提高了16.34 dB、15.07 dB、17.71 dB。从数据可以看出,通过SSD 减影算法,提高了空化噪声比,可以验证SSD 算法是有效的。CBWT-MVCF-SSD 的CNR 值最高,比DAS 空化图像高31.73 dB,三者相结合的效果最佳。

图5 CBWT 对于不同波束合成算法结合SSD 减影图像的影响Fig.5 The effect of CBWT on different beam synthesis algorithms combined with SSD subtraction images
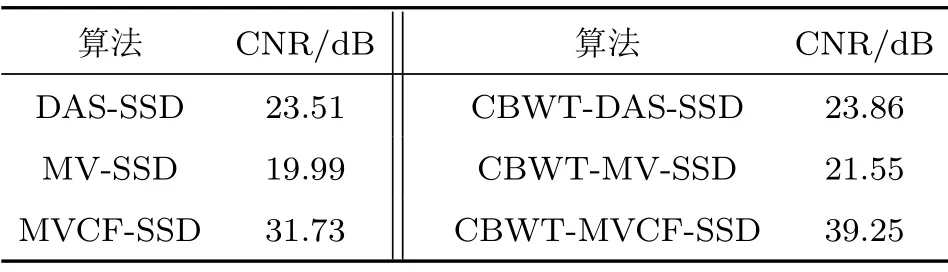
表3 结合CBWT 和SSD 前后空化图像的CNR 值Table 3 The CNRs of cavitation images before and after CBWT and SSD
图6是基于CBWT-MVCF-SSD的空化动态监控序列图,分别是聚焦超声作用50 µs、1 ms、2 ms、5 ms 时的空化图像,图中高亮区域为泡群,显示了不同聚焦超声作用时刻空化分布情况,从而达到对空化活动的动态监控。
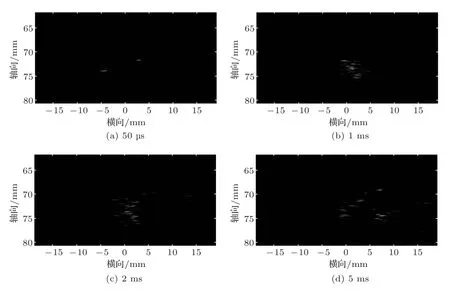
图6 CBWT-MVCF-SSD 最佳效果不同聚焦时刻下空化泡群分布序列图Fig.6 CBWT-MVCF-SSD distribution sequence diagram of cavitation bubble group at different focusing moments for best results
4 结论
本文提出一种结合CBWT、波束合成和SSD数字减影的超快速主动空化成像方法,主要讨论了CBWT、3 种波束合成算法(DAS、MV、MVCF)以及SSD数字减影算法对空化图像CNR值的影响,实验结果表明,CBWT结合波束合成算法可提高空化图像的质量和CNR值,且CBWT-MVCF的效果最佳。进一步结合SSD 数字减影,CBWT-MVCFSSD 空化图像最优,其CNR 值可比DAS 空化图像高31.73 dB,可实现对空化活动的动态监控。
