石化管道巡检的多旋翼无人机云台的设计
2020-03-03陆叶邓梓光陈锦铭
陆叶,邓梓光,陈锦铭
石化管道巡检的多旋翼无人机云台的设计
陆叶1,邓梓光2,陈锦铭1
(1.茂名职业技术学院 机电信息系,广东 茂名 525000;2.三赢科技(深圳)有限公司,广东 深圳 518000)
针对石化管道巡检无人机所搭载的云台在强度刚度、结构稳定性等方面要求高的问题,设计了一种以多旋翼无人机为平台的三轴云台。根据工况要求设计了无人机的机体,同时对云台的结构组成、结构设计、材料选择、所受载荷等方面进行分析,运用UG NX软件的高级仿真模块建立了云台的有限元模型,解算该模型,分析静力学应力应变及动力学四阶模态振型。为验证设计,制作了云台样机,并挂载在无人机上进行测试。结果表明:该云台在强度刚度、减振性能上满足系统稳定性要求,设计合理可行。
石化管道巡检;多旋翼;无人机云台
目前无人机在航拍、农业、植保等领域得到了广泛应用。在石化管道巡检方面,传统的人工巡线方法所花时间长、人力成本高、困难大,而无人机能搭载多种传感器,进行管道泄漏检测作业,不仅具有更高更全的视角,还能进入危险区域观察收集信息,大大提高劳动生产率,减少安全事故的发生,降低经济损失的风险[1-2]。发达国家早已开始利用无人机进行石化设备巡检的研究及应用[3],而我国在这方面的研究还处于起步阶段[4]。为了配合石化管道巡检的任务,无人机需要云台来搭载如运动相机等各种传感器,用于实时传输图像和数据。云台结构稳定性决定了其工作性能,直接影响了无人机巡检的效果。因此,本文利用结构化设计与仿真技术,对石化管道巡检无人机的云台进行了结构设计、静力学校验及动力学分析。
1 无人机云台的结构设计
1.1 云台的结构
石化管道巡检的无人机工作时,搭载高清摄像头和各种精密的检测仪器(如气体报警仪、超声波检测仪等),在自动或遥控飞行模式下,在石化管道等设备上空沿线飞行,且需具备检测、防爆、耐高温、抗风等功能。比较了目前各种无人机的优劣,其中多旋翼无人机能够垂直起飞和降落,具有很强的机动性和可操作性,且易于控制,能很好地满足石化加工环境的要求,因此石化管道巡检的无人机采用六旋翼无人机。利用UG NX软件设计的无人机如图1所示。

图1 无人机三维模型图
无人机上面挂载的云台要能够接收地面遥控指令并根据指令进行调整或保持云台的特定姿态;对工作中无人机产生的振动进行相应的补偿,以保证无人机上的任务载荷能实现巡检作业。无人机云台一般分为能左右旋转的二轴云台和能左右、上下旋转的三轴全方位云台。由于石化管道巡检需要大范围、多角度进行扫描监视,因此本设计采用三轴云台方案,该云台有三个活动自由度:绕轴旋转为俯仰轴,绕轴旋转为横滚轴,绕轴旋转为方位轴,每个轴都由电机控制,电机接收来自控制模块的信号精确地运行定位,实现云台的运动姿态的控制。
设计的云台由控制模块、传感器模块、动力模块、减振结构、支撑结构和连接结构组成。其中控制模块主要是主控板,采用STM32处理器,通过传感器将云台末端姿态读出,再与无人机主控传感器的姿态角比较,发出控制信号让电机及时做出动作修正,从而使装在云台上的相机等外部传感器时刻保持初始平衡位置。传感器模块主要是陀螺仪和加速度传感器MPU6050,用于感应云台末端姿态位置,反馈给主控板。动力模块包括直流无刷电机、磁环等,无刷电机装在云台机架的各个轴连接处,从主控板接收信号,调节云台的各轴到相应的位置,是云台保持稳定的重要零件。磁环是一块环状的导磁体,对高频噪声起到抑制作用,用于配合无刷电机。减振结构主要是减振球,用于缓冲无人机作业时产生的振动,减振球一般采用橡胶材料,长时间反复形变容易产生裂痕,因此需要及时更换,在减振球轴孔插入销钉防止其振裂脱落。支撑结构与无人机机体相连接,是整个云台的支撑,主要零件有顶板和悬架,顶板根据采用多孔样式设计,便于不同型号的无人机搭载,增加了云台的应用范围。支撑结构的主要功能是连接无人机,保护主控板、固定电机和支撑云台上的其他元件。连接结构可以连接云台三个方向的轴,保护无刷电机等电子元件。无人机进行石化管道巡检是需搭载相机等设备进行航拍,因此云台需设计有相机固定板,相机可以通过螺纹孔或者扎带连接上俯仰轴和相机固定板。云台三维模型如图2所示。
云台系统总重约170 g,安装上相机约250 g;俯仰轴转动角度为-30°~+30°;横滚轴转动角度为-45°~+45°;方位轴转动角度为-180°~+180°。
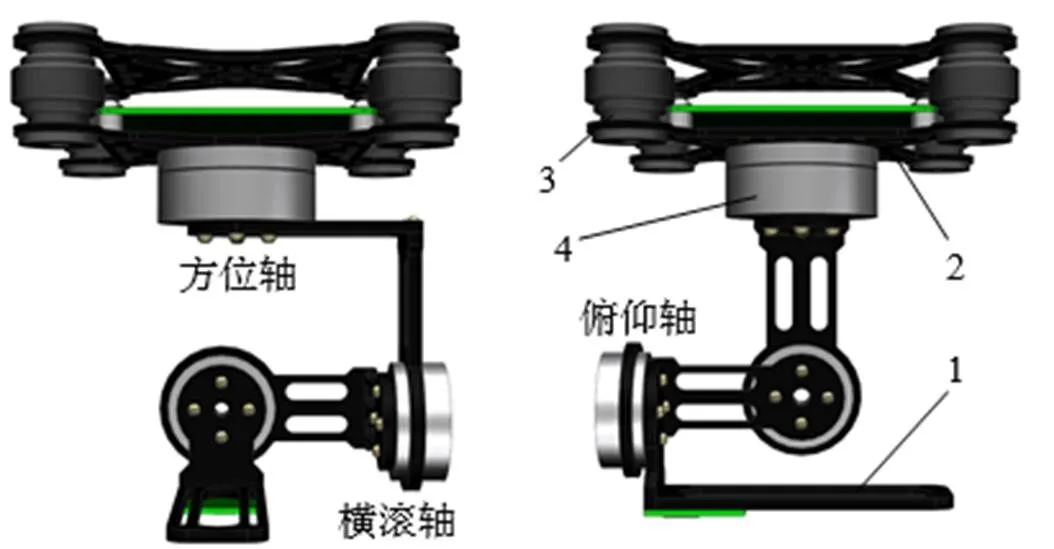
1.相机固定板 2.支撑结构 3.减振结构4.连接结构
1.2 云台主体结构的材料
云台除了无刷电机、传感器等电子元件外,还有其他机械零件,这些零件材料性能的好坏,对无人机起到至关重要的作用,必须满足轻量化、易加工、易装配、够强度等要求,才能保证云台的整体性能,从而实现云台位置的实时精确调整。因此选择铝合金作为云台机械结构中如支撑结构、连接结构等起承载、固定零件作用的部件材料[5],选择橡胶作为减振球的材料。云台主要零件材料如表1所示。
表1 云台主要零件材料
2 云台的静力学校核
为验证无人机云台结构设计的合理性,需进行相关的力学分析[6-7]。UG NX软件是一款较全面的机械设计分析软件,其中高级仿真模块具备有对产品进行有限元分析的功能,其工作流程是建立产品的有限元模型,通过软件内置的NX Nastran等解算器解算模型,得到有效的分析结果[8]。
为了简化计算,忽略云台三维模型中对有限元分析影响很小的螺纹孔、圆角等细小结构,首先将处理好的云台的UG NX装配体模型转换成高级仿真模块的有限元模型,按表1所示的材料设置云台各零件的材料属性,由于云台具有不规则的外形,因此对云台三维模型进行3D四面体网格划分,单元类型为CTETRA(10),单元尺寸为 2 mm。云台模型划分后节点总数为186785,单元总数为103642个。其次将云台系统的主要元件如机械结构件、电机等的重力转换为载荷。云台系统所受载荷及其约束主要是:顶板的四个减振球孔轴处(图3(b)的处)设置为固定约束,模拟云台与无人机机体的连接;分别在方位轴电机位置(图3(b)的处)、横滚轴电机位置(图3(b)的处)、俯仰轴电机位置(图3(b)的处)、俯仰轴臂处(图3(b)的处)施加一个沿坐标轴负方向2.2 N的力、一个沿坐标轴负方向1.6 N的力,一个沿坐标轴负方向1.2 N的力,一个沿坐标轴负方向0.9 N的力,以上作用力是模拟云台系统所产生的重力。
云台的有限元模型如图3所示,云台静力学分析结果如图4所示。
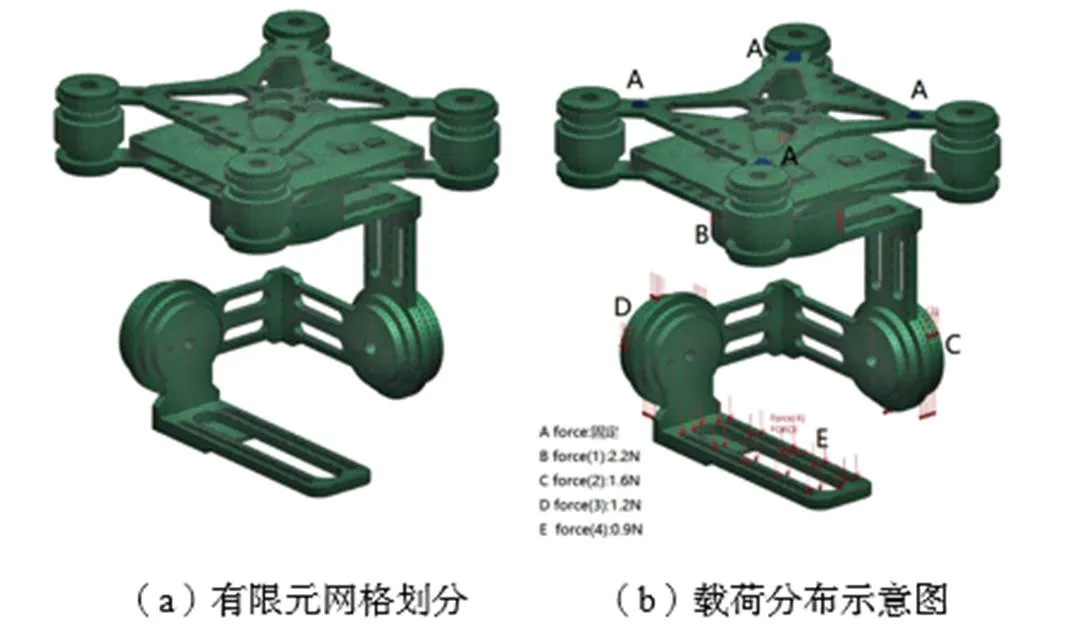
图3 云台的有限元模型
从图4可以看出,最大应力发生在横滚轴连接臂的位置,大小为8.63 MPa,主要来源于扭矩的作用,远小于铝合金材料的屈服强度极限255 MPa。云台最大形变为0.22 mm,不影响其正常工作。
3 云台的动力学模态分析
由于本设计的云台用于多旋翼无人机,该无人机运行时产生的振动情况较复杂[9-10]。原因为:一是多旋翼无人机采用直流无刷电机作为动力,电机数量较多,多个电机同时运行会产生耦合作用;二是各个旋翼的转速不完全相同,运行时容易发生受力不平衡的情况;三是各个旋翼所受的空气流有差别,造成的振动也不同。一般情况下,云台系统运行时产生的振动,其频率集中于40~110 Hz之间。为达到实际振动工况的要求,需要对云台进行动力学四阶模态振型分析。云台的四阶模态振型图如图5所示。
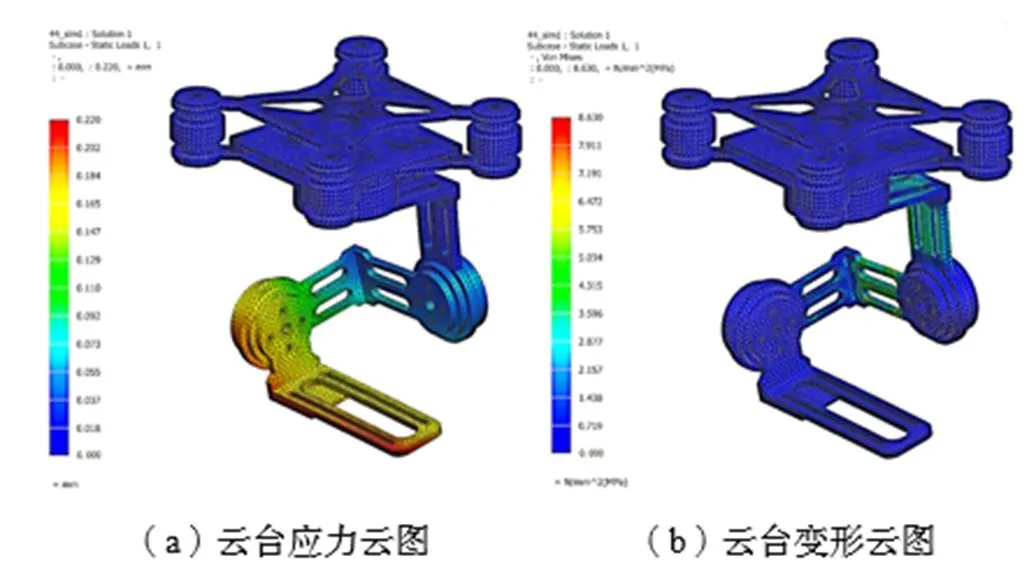
图4 云台静力学分析结果
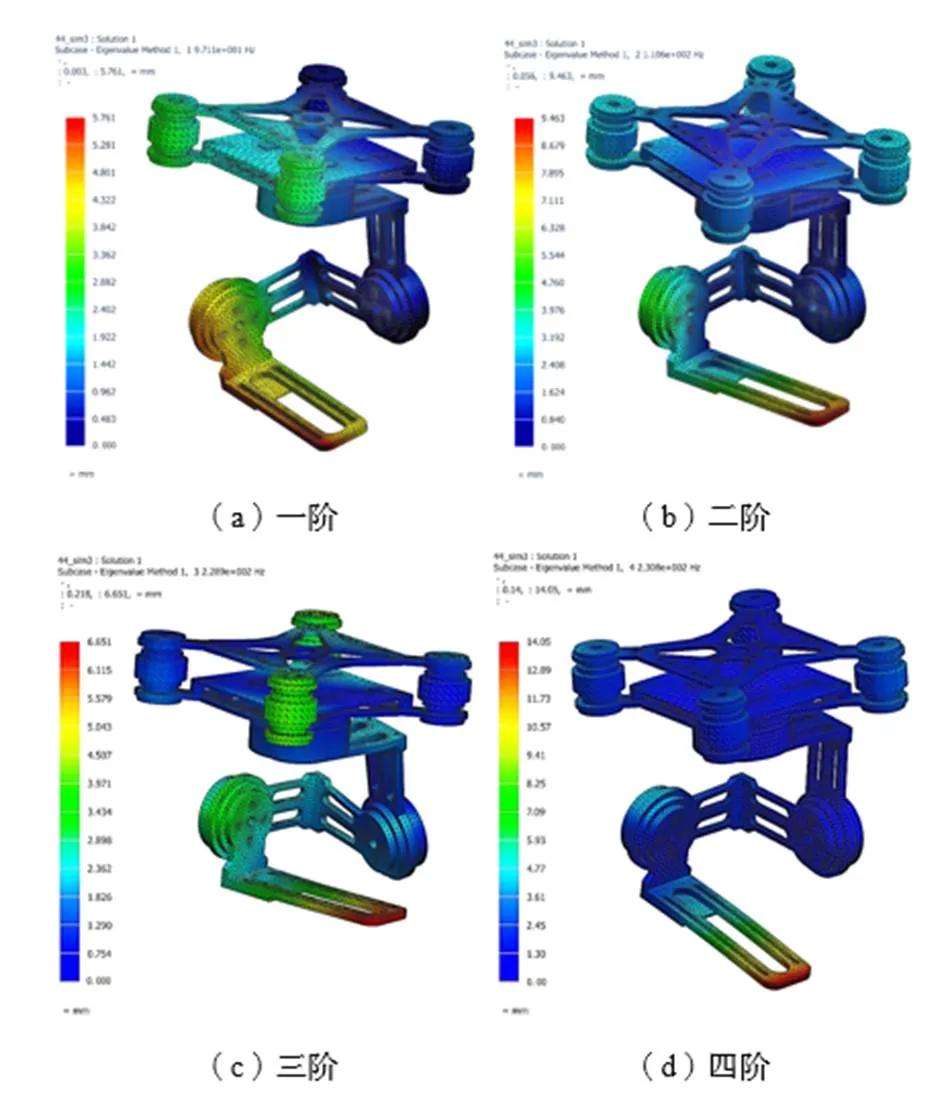
图5 振型云图

表2 各振型的分析
通过图5可以看出,第一阶和第二阶较大的振型变形出现在顶板减振球和俯仰轴臂处,第三阶和第四阶的振型变形出现在俯仰轴臂处,都是弯曲变形。在云台产生共振的频率范围内,云台由于变形产生的位移量较小,第三阶、第四阶振型的固有频率避开了共振频率范围,不会发生共振。因此,云台满足振动工况的要求,设计合理可行。在以上研究基础上制作了云台样机,并进行样机测试,实验结果达到设计要求,图6为无人机挂载云台样机测试。

图6 无人机挂载云台样机测试
4 总结
本文为石化管道巡检的多旋翼无人机设计了配套的三轴云台,先利用UG软件对该云台进行了三维建模,再用UG高级仿真模块对云台进行了静力学校核和动力学模态分析,仿真结果表明该云台是满足设计要求的。为了使无人机能在石化行业得到更广泛的应用,无人机云台的研究将需要融入更多的先进技术,如选用强度更高、防爆性能更好的材料;采用3D打印等先进的制造手段进行复杂零件加工等等,从而使云台达到更理想的性能。
[1]蔡卫林. 无人机在石化管道巡检的应用前景分析[J]. 中国石化,2016(1):6.
[2]秦国晋,冼国栋,杨钦. 油气管道经济损失风险可接受准则研究[J]. 机械,2018,45(9):41-47.
[3]Kent R,Karl P,Nicholas F G,et al. Autonomous Chemical Vapour Detection by Micro UAV[J]. Remote Sensing,2015,7(12):16865-16882.
[4]Zeyu Jiao,Guozhu Jia,Yingjie Cai. A new approach to oil spill detection that combines deep learning with unmanned aerial vehicles[J]. Computers & Industrial Engineering,2019(135):1300-1311.
[5]宋科. 一种多旋翼无人机三轴稳定云台的设计[J]. 机电工程,2018,35(2):153-157.
[6]吴高强,宋军,姜年朝. 某无人机用涡喷发动机主轴疲劳寿命计算[J]. 机械,2014,41(3):21-23.
[7]纯阳. 对两轴光电云台的有限元分析及优化[J]. 制造业自动化,2015,37(12):89-91.
[8]刘仲宇,张涛,李嘉全,等. 超小型无人机光电稳定平台照准架的结构优化设计[J]. 南京航空航天大学学报,2013(45):104-108.
[9]王晶东,于化东,李妍. 小型无人机载光电稳定平台框架结构研究[J]. 机械科学与技术,2014,33(10):1604-1608.
[10]张博豪. 多旋翼无人机云台动力学特性分析及减振控制研究[D]. 石家庄:河北科技大学,2018.
Design of Multi-Rotor UAV platform for Petrochemical Pipeline Inspection
LU Ye1,DENG Ziguang2,CHEN Jinming1
(1.Department of Mechanical and Electrical Information, Maoming Polytechnic College, Maoming 525000, China; 2.Fuhonyang Precision Industrial (Shenzhen). Co., Ltd.,Shenzhen 518000, China)
Aiming at the high requirements of strength, rigidity and structural stability of platform carried by UAV of petrochemical pipeline inspection, triaxial platform for multi-rotor UAV is designed. The airframe of UAV is designed according to the working condition. The structural composition, structural design, material selection and load of the platform are analyzed. The finite element model of the platform is established by using the advanced simulation module of UG NX software. The model is solved and the static stress-strain analysis and the fourth-order mode vibration mode of the dynamics are analyzed. In order to verify the design, the prototype of the platform is made and mounted on the UAV for testing. The results show that the platform meets the stability requirements of the system in terms of strength, stiffness and vibration damping performance. It’s proved that the design is reasonable and feasible.
petrochemical pipeline inspection;multi-rotor;UAV platform
TP242.6;TP391.9
A
10.3969/j.issn.1006-0316.2020.01.013
1006-0316 (2020) 01-0076-05
2019-08-13
广东省智能化制造装备工程技术研究中心(粤科函产学研字[2017]1649号);茂名市科技计划项目“用于石化管道等设备监测、作业的智能飞行机器人关键技术研究”(茂科字[2017]47号);茂名职业技术学院教研项目“构建以机器人为载体的机电创新实践平台”(茂职院[2016]57号)。
陆叶(1979-),女,广东阳江人,硕士,讲师,主要研究方向为机器人技术、智能制造等。
