基于模糊死区补偿的曲面加工机器人PD控制研究
2020-03-03朱海燕刘备
朱海燕,刘备
基于模糊死区补偿的曲面加工机器人PD控制研究
朱海燕,刘备
(湖北交通职业技术学院 汽车与航空学院,湖北 武汉 430079)
针对曲面加工机器人中的死区,提出了一种基于模糊补偿的PD控制算法,该算法用模糊死区补偿器实现机器人中的死区补偿,PD控制算法用于机器人关节的轨迹控制,从而消除死区对机器人轨迹控制的影响;为了验证该算法的有效性,在MATLAB仿真平台进行了数字化仿真,仿真结果表明:与传统的PD控制算法相比,本文所提出的基于模糊死区补偿的PD控制算法能够有效的对机器人中的死区进行补偿,提高了曲面加工机器人的位置精度,减少了位置误差,从而提高了加工精度。
曲面加工;死区;模糊死区补偿;PD控制;MATLAB仿真
随着科学技术的发展,机器人被应用于各行各业中,如通信、机械、汽车、航空航天、物流等领域[1]。因此,机器人的研究得到了广泛的重视。而机器人的轨迹跟踪性能将影响到机器的工作性能,针对机器的轨迹控制,学者们进入了深入的研究,目前主要的控制方法有:PID控制[2]、滑模控制[3-5]、神经网络控制[6]、模糊控制[7]以及反演控制[8]等控制算法,且都取得了很好的轨迹跟踪效果。然而,机器人中诸如齿隙、死区、摩擦等非线性因素将影响运动控制,如果缺乏死区补偿,那么将增大机器人控制误差,引起大幅振荡,从而影响到机器人控制系统的动态响应[9]。
本文以曲面加工机器人为研究对象,针对曲面加工机器人中存在的死区,提出了一种基于模糊死区补偿的PD控制算法,利用模糊逻辑实现对机器人死区的补偿,并利用MATLAB进行仿真,验证了该方法的有效性。
1 死区特性及其补偿方法
1.1 死区非线性特性
如图1所示为非对称死区的非线性特性,用数学表达式,可将如图1所示的非对称死区的非线性特性表示为:
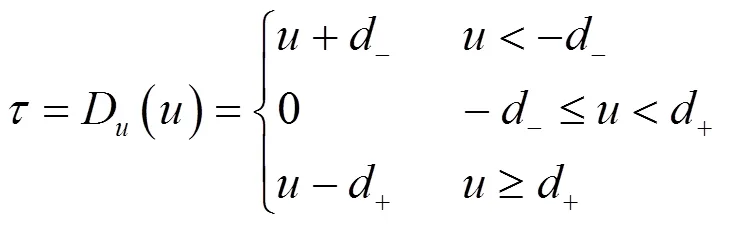
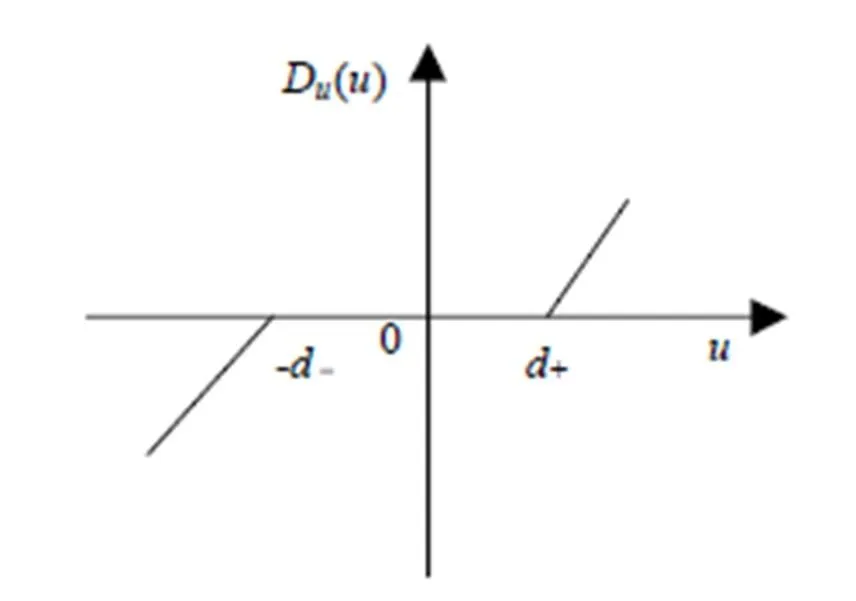
图1 非对称死区的非线性特性
如果将死区特性定义为:
那么式(1)所示的控制输入则可以表示为:

1.2 模糊死区补偿器
根据如图1所示的死区的非线性特性,死区补偿的规则设计为:
隶属函数设计为:
经过模糊补偿后的控制输入为:
根据下述模糊规则可得:
根据模糊理论,模糊系统的输出为:
由图1、式(3)和式(6),可得:
定理1:采用式(7)所设计的模糊规则,则控制输入为:

证明:
定义:
则:
由上述分析结果可得:
将式(17)代入式(11),可得:
2 基于模糊补偿的机器人控制器设计
2.1 系统描述
设曲面加工机器人的动态方程为:

经历死区补偿后系统的控制输入为:

曲面加工机器人的动态方程具有如下特性:
(1)特性1()为对称正定,2<()<1,1和2为常数;
(5)特性5 未知死区有界:
如果死区的宽度为常数,则有:
定义位置跟踪误差为:
定义误差滤波函数为:
式中:Λ为正定阵。
则:
定义式中的非线性项为:

2.2 基于模糊死区补偿的曲面加工机器人控制算法
对于曲面加工机器人而言具有多个关节,那么根据式(3),有:

则式(26)可改写为:

则死区非对称的饱和函数为:
经过死区补偿后的控制输入为:
根据下述模糊规则可得:
那么有:

根据定理1,补偿后的控制输入为:

2.3 控制律设计
死区补偿前的理想控制律设计为:
那么死区补偿后的控制律则应为:
将式(33)代入式(32)中有:

将式(35)代入式(24)中可得:

定理2:如果控制律采用式(33),死区补偿器采用式(34),那么系统的鲁棒项为:
死区宽度的自适应调整算法为:
式中:>0,Γ>0。
3 数字化仿真
为验证本文所提出算法的有效性,以曲面加工机器人的关节驱动伺服电机为控制对象,控制对象的传递函数为:
在MATLAB仿真平台中对传统的PD控制算法以及模糊死区补偿的PD控制算法进行了仿真,其关节跟踪效果以及位置跟踪误差结果如图2~图5所示。
从图2、图3可以看出:传统的PD控制算法的关节跟踪效果图中,理论位置和实际位置两条曲线未重合,有一定的偏离,误差较大;而由基于模糊死区补偿的关节位置跟踪效果图可以看出,理论位置和实际位置两条曲线几乎完全重合,误差较小。
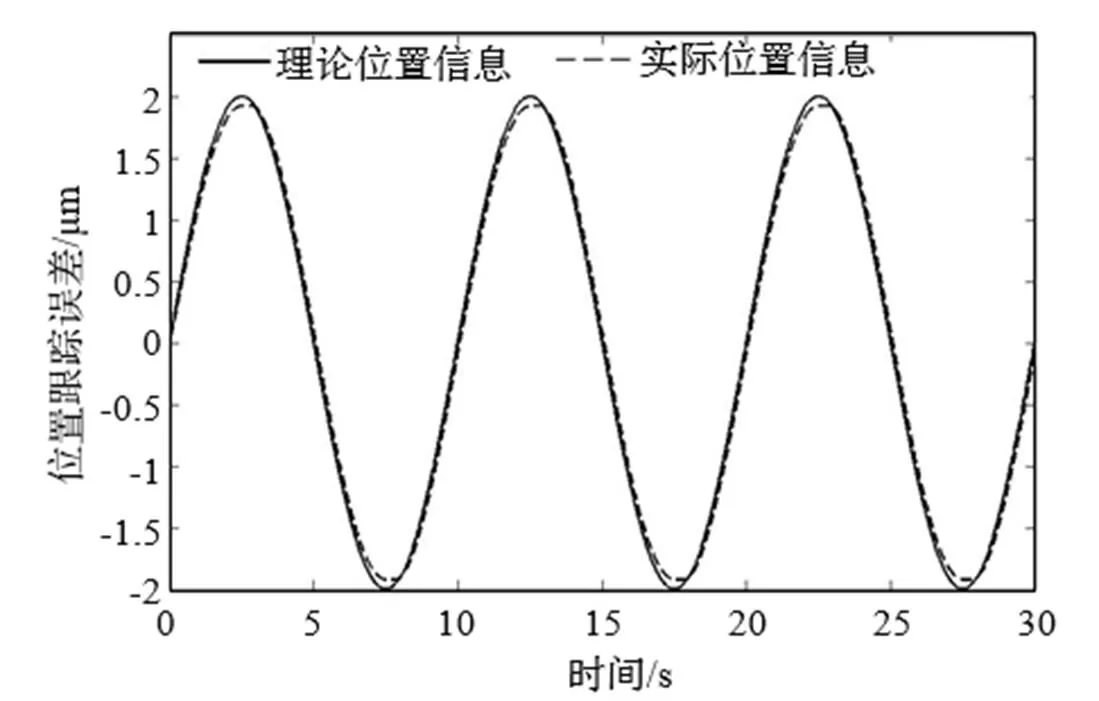
图2 基于PD控制的曲面加工机器人的关节位置跟踪效果
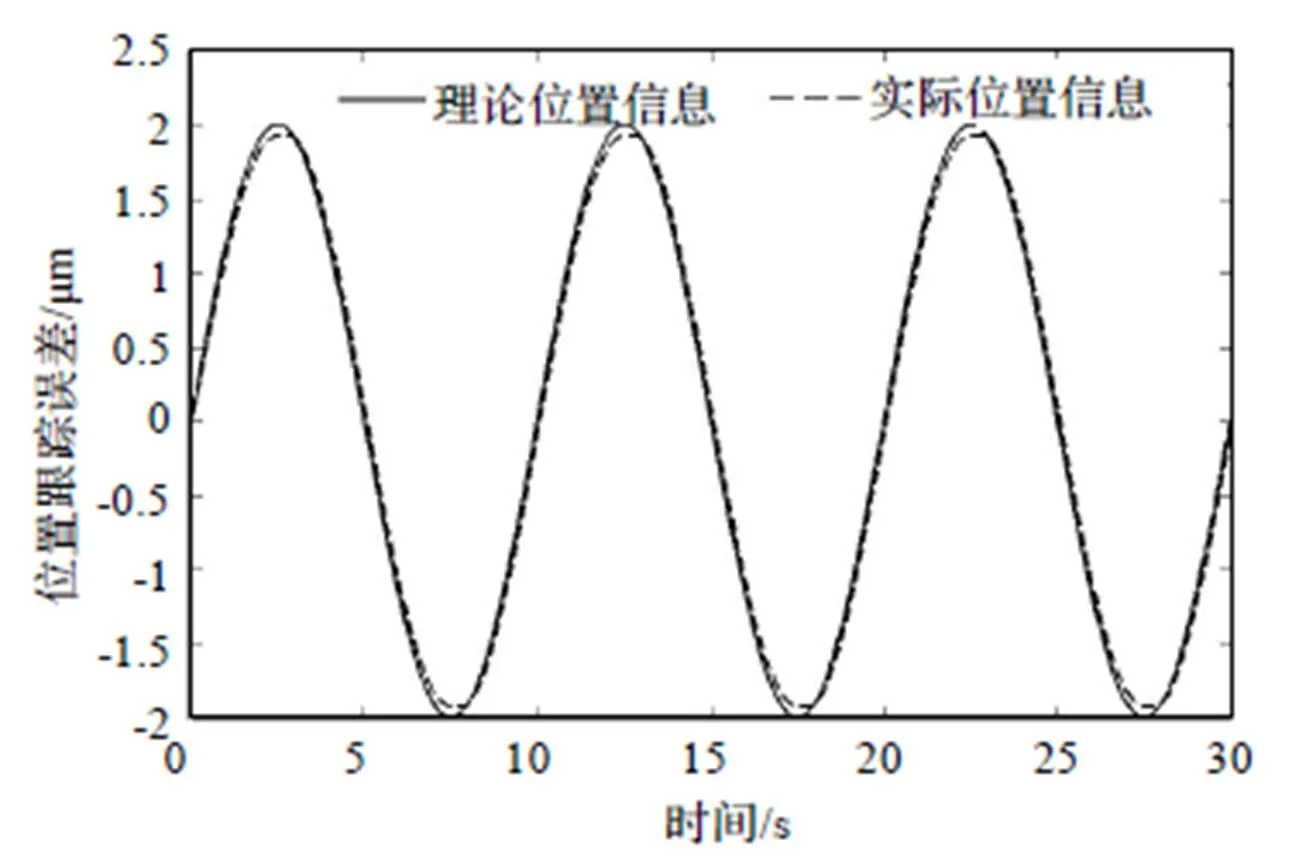
图3 基于模糊死区补偿的曲面加工机器人的关节位置跟踪效果
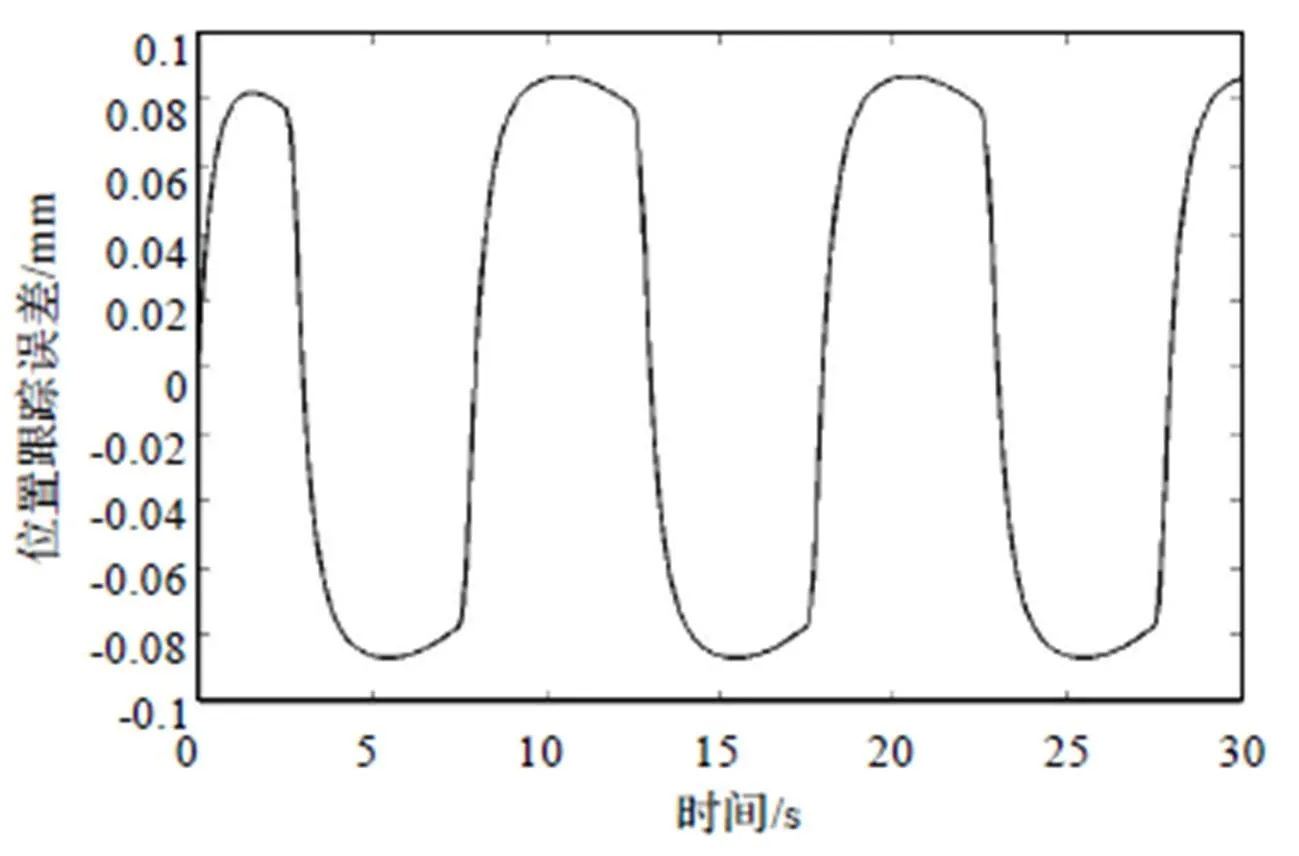
图4 基于PD控制的曲面加工机器人的关节位置跟踪误差
从图4、图5可以看出,传统的PD控制算法中,机器人关节位置跟踪误差最大达到0.086 mm,而使用本文提出的基于模糊死区补偿的PD控制算法的位置跟踪误差最大为0.015 mm,跟踪误差明显减少,跟踪能力明显增强。
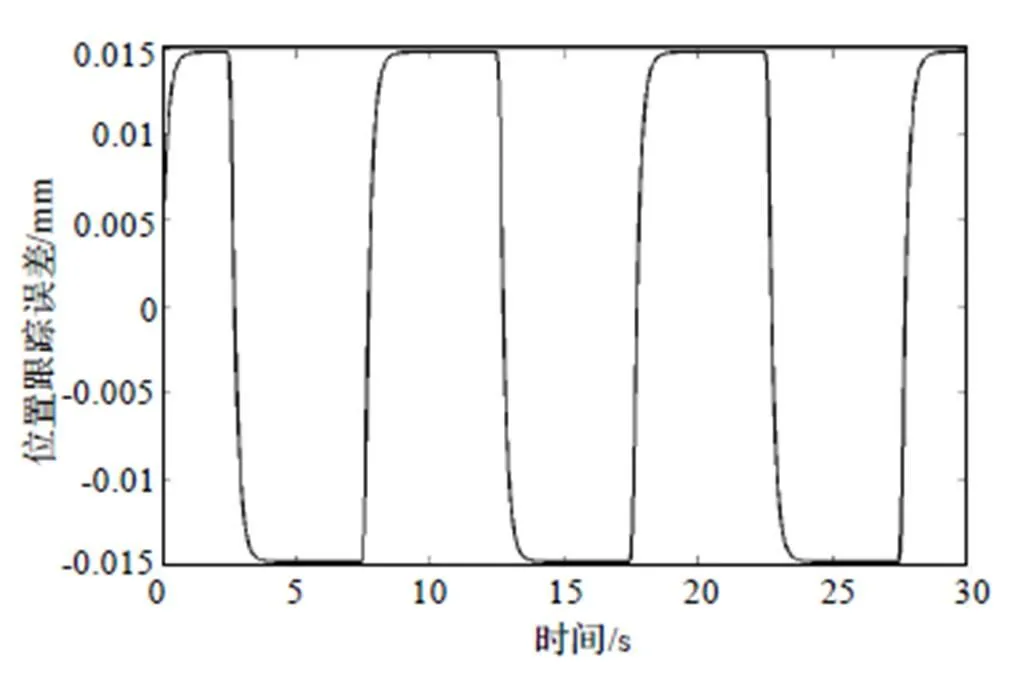
图5 基于模糊死区补偿的曲面加工机器人的关节位置跟踪误差
4 结论
本文针对曲面加工机器人中存在的死区,提出了一种基于模糊补偿的PD控制算法,MATLAB仿真结果表明,该方法的位置误差明显减小。因而本文所提出的基于模糊死区补偿的PD控制算法能够有效的实现对机器人中存在的死区进行补偿,从而提高机器人的位置精度,减少了因机器人的位置精度所引起的曲面加工误差。
[1]熊有伦. 机器人技术基础[M]. 武汉:华中科技大学出版社,2003:1-3
[2]王志勃,毕艳茹. 机器人PID控制算法研究与实现[J]. 计算机技术与发展,2014,24(10):127-130.
[3]李郁峰,李魁武,潘玉田,等. 基于模糊补偿的弹药自动装填机器人滑模控制[J]. 中北大学学报,2014,35(3):258-262,269.
[4]李艳东,王宗义,朱玲,等. 基于递归模糊神经网络的移动机器人滑模控制[J]. 吉林大学学报(工学版),2011,41(6):731-737.
[5]张文辉,齐乃明,尹洪亮. 基于滑模变结构的空间机器人神经网络跟踪控制[J]. 控制理论与应用,2011,28(9):1141-1144.
[6]刘钰,周川,张燕,等. 基于RBF神经网络的轮式移动机器人轨迹跟踪控制[J]. 计算机工程与设计,2011,32(5):1804-1806,1832.
[7]孙炜,王耀南. 模糊B样条基神经网络及其在机器人轨迹跟踪中的应用[J]. 动力学与控制学报,2005,3(1):56-61.
[8]徐传忠,王永初,杨冠鲁. 多关节机器人的反演自适应模糊滑模控制[J]. 电气自动化,2011,33(2):28-31.
[9]葛维维,张天平. 带有未知死区的机器人积分变结构模糊控制[J]. 电光与控制,2011,18(6):31-36.
Study on PD Control of Curved Surface Machining Robots Based on Fuzzy Dead Zone Compensation
ZHU Haiyan,LIU Bei
(Automative & Aviation School, Hubei Communications Technical College, Wuhan 430079, China )
This paper put forward a PD control algorithm based on fuzzy compensation against the dead zone among curved surface machining robots. This algorithm realizes the dead zone compensation of robots via fuzzy dead zone compensator. The PD control algorithm can control the track of the joints of robot, and eliminate the effect of dead zone on the control of robot tracks. In order to check the algorithm validity, numerical simulation was made based on MATLAB Simulink platform. And the results show that compared to conventional PD control algorithm, the PD control algorithm based on fuzz dead zone compensation can effectively compensate the dead zone of curved surface machining robots, improving the positional accuracy and reducing positional error, thence improve the processing accuracy.
curved surface machining;dead zone;fuzzy dead zone compensation;PD control;MATLAB simulation
TP391.9;O159
A
10.3969/j.issn.1006-0316.2020.01.008
1006-0316 (2020) 01-0046-06
2019-10-16
朱海燕(1965-),男,湖北襄樊人,工学硕士,讲师,主要研究方向为车辆工程、机电一体化。