基于雾计算的煤矿全场景监测系统研究
2020-02-29曹健萍李敬兆
曹健萍, 李敬兆
(1.安徽理工大学 电气与信息工程学院, 安徽 淮南 232001; 2.工业节电与电能质量控制协同创新中心, 安徽 合肥 230000)
0 引言
煤矿全场景监测系统将煤矿物理信息与云计算资源深度融合,集煤矿状态感知、数据通信与分析处理、智慧决策于一体,实现煤矿环境安全状态、开采设备工作状态的全方位智能监测[1]。目前,煤矿全场景监测系统主要依赖云计算实现数据处理、存储与决策。但是,随着煤矿自动化技术的不断发展,云计算需实时处理海量监测信息,严重影响煤矿全场景监测系统决策层的时效性与精确度[2]。雾计算是云计算的延伸概念,将数据、数据处理和应用程序集中在网络边缘设备中,可实现系统信息快速传输和处理、有效信息提炼、决策精度提升[3]。因此,本文提出一种基于雾计算的煤矿全场景监测系统,以神经元感知节点为单元设计雾计算神经网络,缓解云计算数据处理压力。
神经元感知节点布置的位置和数量通常是根据需要随机安排的。由于节点发射功率有限,其无线通信范围有限,若部署的节点数量过多,会造成资源浪费;若部署的节点数量过少或位置不合理,可能出现感知死角,因而需对神经元感知节点进行优化部署[4-7]。文献[8]提出一种分布式无线感知网络节点部署算法,通过粒子群优化(Particle Swarm Optimization,PSO)算法优化目标监测区域的网络覆盖和感知节点的布置,但容易出现过早收敛现象,解得的部署方案可能只是局部最优方案。针对该问题,本文通过改进的PSO算法优化感知节点的部署,实现网络结构优化。
1 系统结构设计
基于雾计算的煤矿全场景监测系统包括神经元感知层、边缘传输层、边缘智慧决策层、边缘服务层,结构如图1所示。边缘传输层、智慧决策层、边缘服务层均属于雾计算范畴。
神经元感知层由神经元感知节点组成,模拟人体神经系统的感觉神经元感知煤矿系统的瓦斯含量、温度等信息,对信息进行初步处理后通过边缘通信设备传输至决策层[9-11]。边缘传输层兼容多种通信协议,通过边缘网关使基于不同通信协议的网络系统互联,实现通信数据的重新统一打包。利用全功能设备(Full Function Device,FFD)布置Mesh网络,Mesh网络中的神经元感知节点间相互连接,单个节点有多条连接通道,即使个别节点出现故障,也不影响整个网络的可靠运行[12-15]。智慧决策层处于整个系统的本地服务器中,其本质上是一种边缘计算平台。通过本地数据库接收来自本地的数据信息并分类处理,建立BP神经网络模型,结合无迹卡尔曼滤波算法,优化处理煤矿多传感器参数信息,从而有效地从海量数据中提炼有用信息,高效精确地作出决策,并通过网关分类下达至神经元感知节点。同时,边缘计算平台通过TCP通信协议入网,将简化处理后的有效数据传输至边缘服务层。边缘服务层主要指云服务平台,用于接收经过处理的数据和决策信息,并进行数据分类、存储和管理,为后期维护管理提供依据。
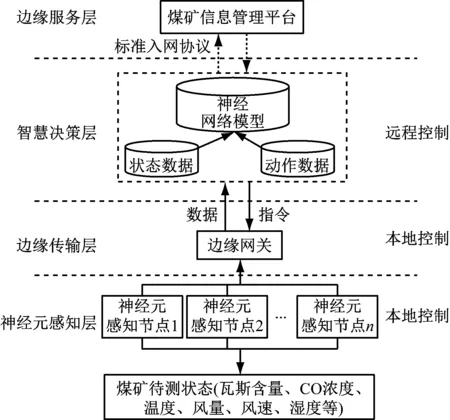
图1 基于雾计算的煤矿全场景监测系统结构Fig.1 Structure of coal mine full scene monitoring system based on fog computing
2 神经元感知节点设计
神经元感知节点包括无线感知节点和有线感知节点2种。无线感知节点主要由传感器模块、控制器模块、无线通信模块及供电模块组成,其结构如图2所示。
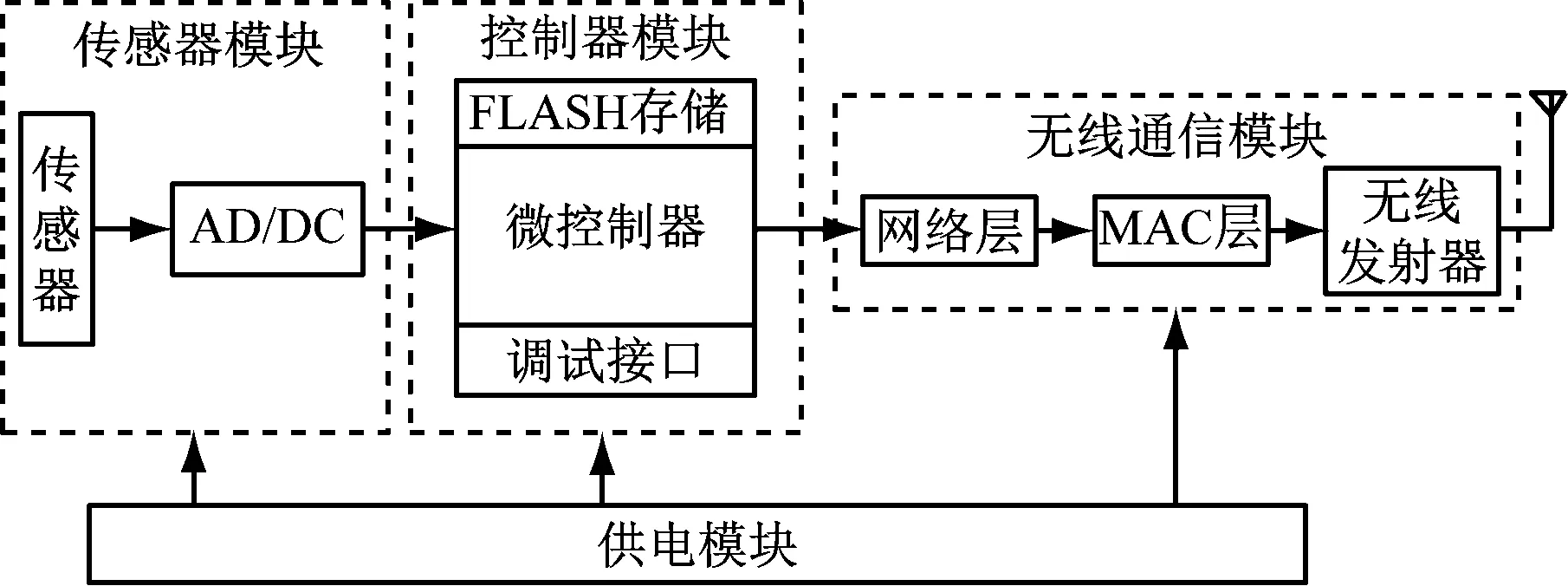
图2 无线感知节点硬件结构Fig.2 Hardware structure of wireless sensing node
传感器是基本感测元件,应根据煤矿各系统实际运行情况,结合检测精度要求和采集频率要求,进行传感器选型。微控制器是神经元感知节点的核心决策与控制单元。选用的微控制器应具有功耗低、信息处理效率高及集成度高等特性,支持休眠模式。由于不同神经元感知节点之间传输信号功耗大,在无数据收发时微控制器应处于休眠状态。
3 神经元感知节点部署
3.1 神经元感知节点部署框架
神经元感知节点网络部署框架如图3所示。首先,根据煤矿状态监测需要,随机投放神经元感知节点。然后,利用RSSI算法确定汇聚节点位置并估计其网络覆盖范围。最后,采用改进的PSO算法优化神经元感知节点部署。
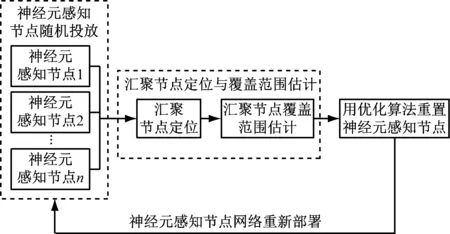
图3 神经元感知节点部署框架Fig.3 Deployment framework of neuron sensing nodes
3.2 汇聚节点的定位与覆盖范围估计
各神经元感知节点通过RSSI定位算法确定自身位置,节点m(xm,ym)与n(xn,yn)之间的距离为

(1)
选用阴影衰落模型作为神经元感知网络汇聚节点的信号传输模型,神经元感知节点i接收到的信号强度PR(di)为
(2)
式中:A为汇聚节点的发射功率;β为路径损耗;di为节点i与汇聚节点之间的距离;ndB为偏差函数。
3.3 神经元感知节点优化部署
以扩大重点网络覆盖区域和减少神经元感知节点投放为目的,通过改进的PSO算法实现神经元感知节点优化部署。
假设粒子群中的粒子数为N,搜索空间为D维,粒子的空间位置向量xi=(xi1,xi2,…,xiD)。xi向量中,从左向右依次每2个元素表示一个感知节点的位置坐标,如(xi1,xi2)表示一个神经元感知节点的位置坐标。粒子的空间速度向量vi=(vi1,vi2,…,viD)与位置向量同理。设粒子个体寻优的最优空间位置Pi=(Pi1,Pi2,…,PiD),粒子群中最佳位置Pg=(Pg1,Pg2,…,PgD)。
由于神经元感知节点部署侧重于通信覆盖区域,确定优化目标函数为
(3)
通过优化目标函数评价粒子所在位置的优劣,在粒子位置及速度不断更新的过程中寻找最优位置。粒子的位置和速度更新公式为
vi(t+1)=ωvi(t)+h1r1(t)[Pi(t)-xi(t)]+
h2r2(t)[Pg(t)-xi(t)]
(4)
xi(t+1)=xi(t)+vi(t+1)
(5)
式中:t为时刻;ω为惯性权重系数;h1和h2为学习因子;r1和r2为独立随机变量。
在经典PSO算法中,惯性权重系数ω是从初始点出发并根据前一次速度得出的比例因子,学习因子h1和h2通常情况下数值为2。整个更新过程是从初始点沿确定的方向转移,存在过早收敛现象,易出现局部最优寻解的情况。针对这一现象,对PSO算法进行改进。在保障粒子群稳定的前提下,为防止ω因沿某一方向转移而出现局部收敛现象,利用余弦非线性函数提高ω方向转移的随机性。设惯性权重系数为
ω(t)=0.1+0.9cos(t/c)
(6)
式中c为迭代更新次数。
在改进惯性权重系数的基础上,根据粒子稳定运动条件,得到学习因子为
(7)
改进的粒子速度更新公式为
vi(t+1)=ω(t)vi(t)+h1(t)r1(t)[Pi(t)-xi(t)]+
h2(t)r2(t)[Pg(t)-xi(t)]
(8)
粒子位置更新公式不变。通过粒子位置和速度更新公式和优化目标函数,进行神经元感知节点的优化部署。
4 仿真分析
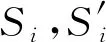
在Matlab平台进行仿真,设部署区域为600 m×600 m的矩形,区域内布置3个中心节点。初始状态下,将区域划分为20 m×10 m的网格进行节点部署。设权重系数σ1=0.4,σ2=0.6,选用经典PSO算法作为对比,得到Matlab仿真结果,如图4所示。
图4 经典PSO算法与改进PSO算法性能对比Fig.4 Performance comparison between classic PSO algorithm and improved PSO algorithm
由图4可知,与经典PSO算法相比,改进PSO算法能够更快寻得最优解,最优解下的整体覆盖率更高。
经过100次独立仿真,统计并比较2种算法的通信覆盖率和适应度等,结果见表1。

表1 经典PSO算法与改进PSO算法的覆盖率对比Table 1 Coverage comparison between classic PSO algorithm and improved PSO algorithm
由表1可知,与经典PSO算法相比,改进PSO算法将整体通信覆盖率的最优值、最差值和平均值分别提高了3.19%,3.31%,3.25%。改进PSO算法具有收敛快速有效、适应性强、稳定性高等优势,可应用于神经元感知节点优化部署方案中。
5 结语
提出一种基于雾计算的煤矿全场景监测系统设计方案,介绍了系统整体架构及神经元感知节点硬件组成,并结合边缘设备的特点,通过改进PSO算法优化边缘神经元节点的部署,提高通信覆盖率,降低节点部署成本。该系统充分利用了边缘计算技术,将数据处理决策任务从远程网络监测中心迁移到网络边缘侧,实现了系统中冗长数据在边缘侧的过滤,从而减小了海量数据分析与存储对云计算造成的压力,提升了数据信息处理效率。提出用改进PSO算法优化神经元感知节点部署,从而优化雾计算网络结构,并通过仿真验证了其有效性。
