卫星导航干扰监测与定位系统设计及实现
2020-02-27李洪力刘安斐窦晓晶
李洪力,刘安斐,窦晓晶,刘 京
(北京卫星导航中心,北京 100094)
0 引言
卫星导航系统能够提供全天候、全天时、高精度的导航定位服务,在国防建设和国民经济中发挥着重要作用。卫星导航系统地面站作为系统的核心组成部分,负责整个导航系统的业务运行与管理控制,其是否受到电磁干扰是制约系统稳定运行的关键因素。随着导航战的推进,卫星导航系统运行过程中面临严峻的电磁干扰问题,对RDSS业务和RNSS业务均多次发生干扰情况,并在不同程度上对系统服务质量产生影响[1-3]。同时,地面站场区电磁环境复杂,以及自身电子设备可能产生的电磁兼容问题,迫切需要对地面站的电磁环境进行长期监测。该卫星导航系统地面站在设计时具备一定的抗干扰能力[4-5],但在干扰信号监测和干扰源定位方面还缺乏有效技术手段,亟需进行相关条件建设。
为实现卫星导航系统地面站的干扰监测与定位,在综合考虑满足卫星导航系统RDSS业务和RNSS业务[6-8]干扰监测与定位需求的基础上,对地面站干扰监测与定位系统进行了总体设计和RDSS入站干扰监测与定位分系统、RNSS地面站场区干扰监测与定位分系统设计[9-11],实现了RDSS业务入站信号的干扰监测与定位和RNSS业务地面站场区附近复杂电磁环境的实时监测与干扰定位,为干扰源排查与消除提供了有效技术手段,从而最大程度减小了干扰对系统的影响,保障了卫星导航系统频谱资源的正常使用,确保了系统安全稳定运行。
1 系统方案设计与实现
1.1 系统总体方案设计
卫星导航系统地面站干扰监测与定位系统主要由RDSS干扰监测与定位分系统和RNSS干扰监测与定位分系统2大部分组成,系统组成框图如图1所示。

图1 卫星导航系统地面站干扰监测与定位系统组成框图Fig.1 Satellite navigation system ground station interference monitoring and positioning system composition diagram
1.1.1 RDSS干扰监测与定位分系统
RDSS干扰监测与定位分系统负责卫星导航系统RDSS业务卫星入站信号的干扰监测与定位[12],主要由5台监测接收机(含3台双信道监测接收机和2台三信道监测接收机)、1台数据库服务器、1套频谱监测管理软件和1套干扰源定位平台软件组成,分系统组成框图如图2所示。

图2 RDSS干扰监测与定位分系统组成框图Fig.2 RDSS interference monitoring and positioning subsystem composition diagram
双信道(三信道)监测接收机安装在发射机房,接收GEO卫星天线入站信号,完成信号的射频处理、采样、数字信号处理和测量;数据服务器作为数据库运行的硬件平台,为系统软件运行和数据存储提供资源和环境;频谱监测管理软件用于控制系统中各监测接收机的工作状态,设置参数并读取数据,同时在界面上显示频谱图和信号测量结果,通过功率测量等手段实现干扰信号判别,触发干扰报警,并将干噪比测量结果发送给干扰源定位平台软件,通过定位解算实现服务区内的RDSS干扰源定位。
1.1.2 RNSS干扰监测与定位分系统
RNSS干扰监测与定位分系统负责卫星导航系统RNSS业务地面站场区导航信号频谱的干扰监测与定位。主要由一套干扰监测测向固定站和一套干扰监测测向移动车组成。
(1)RNSS干扰监测与定位分系统固定站
固定站建设在卫星导航系统地面站内,全天候监测地面站场区附近电磁环境,主要由1套测向系统(含测向天线和测向接收机)、1套宽带监测系统(含监测天线和宽带监测接收机)、1套窄带监测系统(含监测天线和RNSS多信道监测接收机)、1套RNSS数据库服务器、1台监测操作控制终端和1套频谱监测管理软件组成。固定站组成框图如图3所示。

图3 RNSS干扰监测与定位分系统(固定站)组成框图Fig.3 RNSS interference monitoring and positioning subsystem(fixed station) composition diagram
RNSS多信道监测接收机(含1块天线分配卡)通过4个定频监测信道固定监测卫星导航系统RNSS业务下行3个导航频点及RDSS业务下行S频点附近频段的频谱状况,当发现周围电磁环境异常时进行报警和分析,宽带监测接收机通过1个扫描监测信道对整个监测频段进行扫描监测;当发现干扰时,固定站测向系统对干扰信号进行测向,移动监测车根据固定站测向结果指引,进行多点测向,根据多次测量结果选取一致性较好的测向结果进行干扰源定位,为使用便携式频谱监测设备逼近查找干扰源的具体位置提供指引。
(2)RNSS干扰监测与定位分系统移动车
移动车主要由1套测向系统(含测向天线和测向接收机)、1套宽带监测系统(含宽带监测天线和宽带监测接收机)、1套监测操作控制终端及1套频谱监测管理软件组成。测向部分采用车载天线升降杆系统,将测向天线安装在气动升降杆上,当需要测向时可升高天线高度,提高测向的精度和准确度。其他附属设备实现系统供电和联网操作与控制。移动监测车内常备便携式监测测向设备,用于现场干扰排查。移动车组成框图如图4所示。

图4 RNSS干扰监测与定位分系统(移动车)组成框图Fig.4 RNSS interference monitoring and positioning subsystem (moving vehicle) composition diagram
1.2 分系统单机方案设计
1.2.1 RDSS干扰监测与定位分系统单机方案设计
(1)RDSS多信道监测接收机
RDSS多信道监测接收机是RDSS干扰监测与定位分系统的核心设备,可监测卫星导航系统GEO卫星入站信号,发现干扰时可进行声光报警、信号特征分析和参数测量,能够记录干扰信息,具有干扰频谱回放和干扰数据提取功能。发现干扰时可进行信号干噪比测量,将测量结果送给RDSS干扰源定位平台软件进行定位解算,实现服务区内的干扰源定位功能。RDSS多信道监测接收机包括双信道监测接收机和三信道监测接收机,其中双信道接收机的2个信道是同步采样处理的,三信道接收机在双信道接收机的基础上增加一个独立的C/C监测信道。
接收机的设计基于CPCI工控机平台,主要由射频单元、标频单元和数字信号处理单元组成,其中射频单元包括信道和频合2部分,各单元采用CPCI板卡设计。天线信号首先经过滤波和放大,对频段内信号进行放大,对频段外信号进行衰减,然后经过变频,输出中频信号;中频信号送入数字信号处理单元进行采样、下变频和FFT计算,计算结果经PCI总线送给上位机,进行数据处理和信号特征测量,将测量结果和经补偿的FFT数据通过网络端口送给监测控制软件。标频单元负责时钟的产生,具有外标频输入接口,可使用内部或外部基准频率源。监测接收机原理框图如图5所示。

图5 RDSS多信道监测接收机原理框图Fig.5 RDSS multi-channel monitoring receiver schematic diagram
(2)RDSS监测管理软件
RDSS监测管理软件是RDSS干扰监测与定位分系统的监控软件,主要负责对RDSS多信道监测接收机的参数控制、实时监测频谱显示、干扰报警、干扰查询、频谱记录及回放等功能。采用QT5.3,VS2010进行软件设计,具备良好的人机交互界面,主要的实现界面如图6所示。

图6 RDSS监测管理软件实时监测界面Fig.6 RDSS monitoring management software real-time monitoring interface
(3)RDSS入站干扰源定位平台软件
RDSS入站干扰源定位平台基于幅差法干扰源定位原理实现系统入站干扰源定位。在接收到干扰源定位指令时,根据系统卫星G/T值分布数据,完成干扰源定位解算、定位结果地图显示和定位结果存储,同时利用系统实时入站用户定位数据修正系统卫星G/T值分布,确保干扰源定位精度。
RDSS入站定位平台软件采用C#进行设计,操作方便,界面友好,可实现RDSS入站干扰源的手动和自动定位功能,并可将定位结果保存为图片。
1.2.2 RNSS干扰监测与定位分系统单机方案设计
(1)RNSS多信道监测接收机
RNSS多信道监测接收机用于监测RNSS业务下行3个导航频点及RDSS业务下行S频点附近频段的频谱状况,当发现周围电磁环境异常或出现干扰时进行报警、信号分析测量及干扰数据存储,设备采用四通道并行监测。
RNSS多信道监测接收机结构设计基于CPCI工控机平台,主要由射频单元、标频单元及数字信号处理单元组成,其中射频单元包括信道和频合2部分,一个射频单元包括2个独立的射频信道,各单元采用CPCI板卡设计。天线信号首先经过滤波和放大,对监测信号进行放大,对频段外信号进行衰减,然后经过变频,输出中频信号;中频信号送入数字信号处理单元进行采样、下变频和FFT计算,计算结果经PCI总线送给上位机,进行数据处理和信号特征测量,将测量结果和经补偿的FFT数据通过网络端口送给监测控制软件。标频天线分配单元由2部分组成,标频部分负责时钟的产生,具有外标频输入接口,可使用内部或外部基准频率源,天线分配部分负责将天线输入信号分配给4个独立的监测信道。监测接收机原理框图如图7所示。
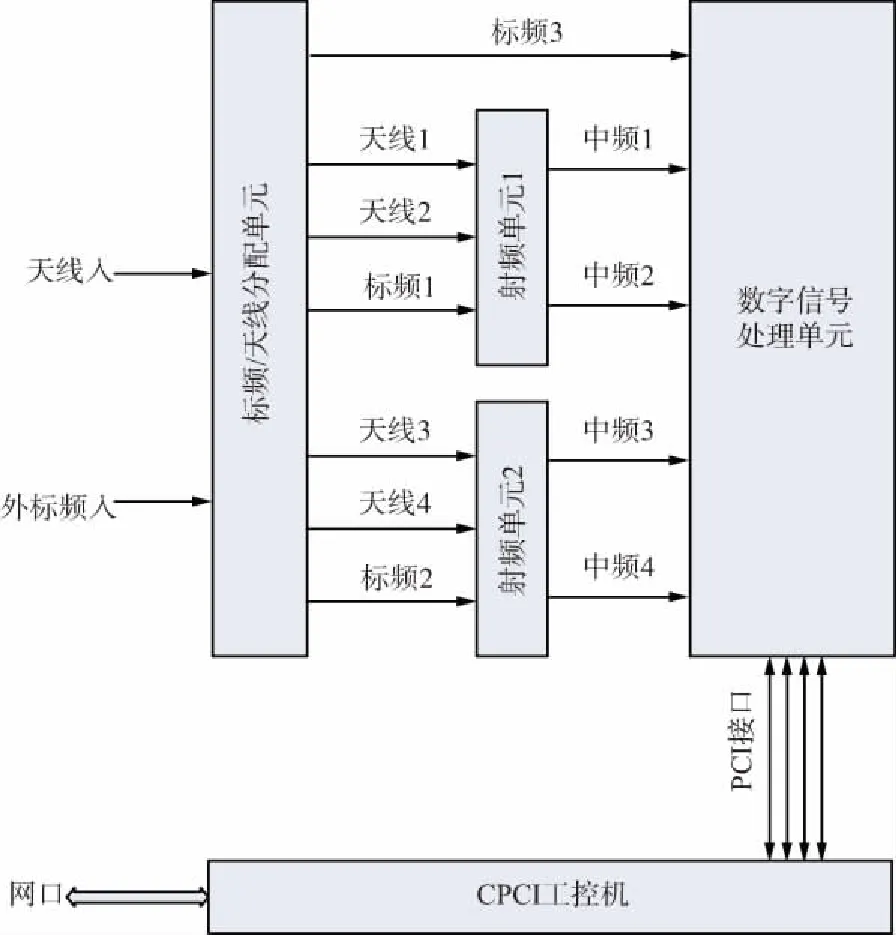
图7 RNSS多信道监测接收机原理框图Fig.7 RNSS multi-channel monitoring receiver schematic diagram
(2)宽带监测接收机
宽带监测接收机是RNSS干扰监测与定位分系统的宽带扫描监测设备,具有完善的频谱监测功能。接收机主要由射频信道单元、中频信号处理单元、标频单元、电源单元和远程控制单元组成。监测接收机原理框图如图8所示。
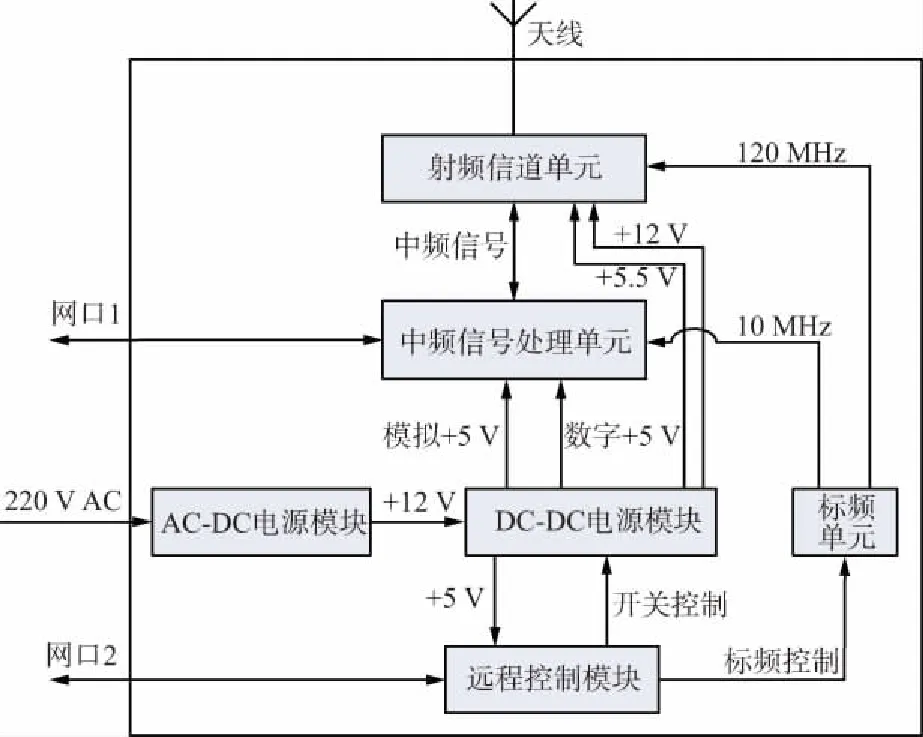
图8 宽带监测接收机原理框图Fig.8 Wideband monitoring receiver schematic diagram
(3)测向系统
测向系统由测向天线和双通道宽带监测测向接收机2部分组成,是RNSS干扰监测与定位分系统固定站和移动车的核心设备。测向系统采用双通道相关干涉仪测向体制,天线接收的射频信号经2个通道接收机进行下变频处理后变频为可采样的中频信号,经双通道采集卡采集,再变频并转换为基带IQ数据,IQ数据经相关运算后计算得出波的方位。
为了保证2个接收通道的相位是同步的,接收机射频部分配置有一部校准信号源,在每次数据采集前,先将校准源打开,校准源信号送入天线阵中的天线开关,功分成2路后再由接收机接收、采集处理,测出当前频率下2个接收通道的相位差,此相位差将作为固有误差予以消除,以确保实际测量的空中信号方位正确。
系统整机由测向天线和测向接收机组成,测向接收机包括双信道射频前端、信号采集处理、控制单元和电源等功能单元。其中,射频前端完成射频信号的接收及到中频的转换;信号采集处理单元完成中频信号的A/D变换与处理,以及对测向天线的控制;控制单元为嵌入式工控平台,是整个系统的控制中心和测向算法实现单元;接收机电源负责给射频前端和测向天线进行供电,控制单元电源负责为嵌入式工控平台供电。系统框图如图9和图10所示,车载测向系统和固定站测向系统相比,测向接收机完全相同,测向天线进行小型化设计。

图9 双通道宽带监测测向系统组成框图Fig.9 Two-channel wideband monitoring and direction finding system composition diagram

图10 双通道宽带监测测向系统设计框图Fig.10 Two-channel wideband monitoring and direction finding system design diagram
(4)RNSS监测测向管理软件
RNSS监测测向管理软件是RNSS干扰监测与定位分系统的监控软件,实现设备监测参数控制、监测数据采集、数据分析处理和监测数据存储等功能。软件设计采用C/S架构,采用Oracle数据库进行监测数据管理,功能强大、可靠性高、操作界面友好,支持设备参数控制、实时频谱显示、测向结果显示、地图显示、频谱回放、报表生成以及离线分析等功能[13-14]。软件实现界面如图11所示。

图11 RNSS监测测向管理软件实现界面Fig.11 RNSS monitoring and direction finding management software implementation interface
2 关键技术
2.1 基于同星双波束入站干噪比差值的幅差法干扰源定位技术
RDSS系统卫星工作于地球静止轨道,每颗星采用双波束入站,每个波束覆盖区内各点发射的上行L信号到达星上天线时对应的G/T值不同,且同一个G/T值对应地面一条闭合曲线[15-17],离波束中心越远闭合曲线对应的G/T值越小。与波束覆盖区特性对应,每颗卫星2个波束G/T差值也呈现类似分布关系,即2个波束G/T差值相等的点分布在一条闭合曲线上(称为等差值曲线),而地面控制站接收到的两波束间干噪比(J/N0)差值与该G/T差值存在直接关系[18]。
若系统同一颗卫星的各波束下行频点接近,同时地面天线、低噪声场放等射频接收设备采用多频点共用模式,则可认为空间路径损耗和设备增益、损耗基本相同,此时地面控制站接收到的任意2个波束间的干噪比(J/N0)差值只与卫星对应2个上行接收天线的G/T值差值有关,具体关系推导如下。
以1个波束为例,干扰信号经卫星上行链路到达卫星接收天线的干噪比[J/N0]u为:
[J/N0]u=[EIRP]J-[L]u+[G/T]s-[k]。
经卫星转发通过下行链路到达地面控制站低噪声场放的干噪比[J/N0]d为:
[J/N0]d=[EIRP]s-[L]d+[G/T]e-[k],
[EIRP]s=[EIRP]J-[L]u+[G]R+[G]tran+[G]T,
式中,EIRPJ为干扰源发射的等效全向辐射功率;EIRPs为卫星发射的等效全向辐射功率;Lu,Ld分别为干扰源到卫星、卫星转发器到地面站天线的自由空间损耗;[G/T]s,[G/T]e为星上接收天线和地面接收天线的品质因数;k为波尔兹曼常数,k=1.38×10-23;GR,Gtran,GT分别为星上接收天线增益、转发器增益和星上发射天线增益;中心控制系统地面接收到的总干噪比[J/N0]sum可根据上下行干噪比计算得出:
通常星上转发器增益比上行接收信号强度高出多个数量级,由上式可得[J/N0]sum主要取决于[J/N0]u,可认为[J/N0]sum≈[J/N0]u。因此,对于同一颗卫星的任意2个波束有:
而星上各个波束接收天线距离很近,可以认为干扰信号经任意2个入站波束的上行链路损耗相同即Lu1=Lu2,则有2个波束的入站干噪比差值等于2个波束接收天线G/T差值,即:
Δ[J/N0]sum12=Δ[G/T]s12。
因此,可以认为地面干扰源通过同星2个波束入站的干噪比差值对应地面一条等差值(G/T差值)曲线,可根据同星2个波束间的干噪比差值进行干扰源定位:当只有一颗星的2个入站波束接收到干扰时,可将干扰源定位在波束间G/T差值曲线上;若多颗星的所有波束均同时接收到干扰,则可将干扰源定位在多星G/T差值曲线的交点处,定位示意如图12所示。

图12 幅差法干扰源定位示意Fig.12 Amplitude difference interference source positioning method schematic diagram
2.2 “相位相关+电平相关”联合测向技术
传统的相关干涉仪测向技术[19]主要利用各阵子之间的相位差信息,与样本库中的相位样本数据进行比较,通过相关运算,获得来波方向信息。但是在城市环境下,由于存在建筑物的信号遮挡与反射,对相位测量影响很大,导致测向系统性能下降,表现为测向质量差或测向结果跳动大。
本方案采用无源双极化相关干涉仪测向技术[20],并通过“相位相关+电平相关”联合模式完成测向,综合利用测向天线多元阵子间的电平和相位信息,充分发挥电平相关抗多径能力好、相位相关测向精度高的优点。首先依据电平相关结果获得来波比较粗略的方向范围,然后在粗选的范围内利用相位相关的结果搜索来波方向,获得更为精确的结果,极大地克服了城市环境下建筑物信号遮挡与反射影响单一相位测量结果而导致的测向质量差或测向跳动大等问题。
本方案采用9元阵测向天线,中央参考阵子为双锥全向阵子,四周采样天线采用的双极化扇形天线阵子具有一定的方向性,如图13所示。当来波方向如图13所示时,阵子3和4接收信号较强,阵子7和8接收信号较弱,每个采样阵子的电平测量结果都存在差异,因此电平分布也包含了来波方向信息。与相位相关类似,采样时将每个采样阵子与参考阵子的电平差也存储在样本库中,进行干扰源测向时,将测量获得的9个阵子电平信息与样本库中的电平样本做相关运算,获得电平相关的测向结果。

图13 “相位相关+电平相关”联合测向示意Fig.13 “Phase correlation + level correlation”joint direction finding schematic diagram
测向系统联合利用“相位相关和电平相关”结果,进行联合测向,结合电平相关抗多径能力好、相位相关测向精度高的优点,首先由电平相关结果获得来波比较粗略的方向范围,然后在初选的范围内利用相位相关的结果搜索来波方向,可充分发挥二者的优点。
3 结束语
本文进行了卫星导航系统地面站干扰监测与定位系统总体方案及RDSS入站、RNSS场区干扰监测与定位分系统方案设计,实现了卫星导航系统地面站干扰监测与定位系统建设,为卫星导航系统干扰源排查与消除提供了有效技术手段。设计成果已成功应用于我国卫星导航系统,在保障系统稳定运行和服务质量方面发挥了重要作用。随着未来电磁环境日益复杂,其成果可推广应用于其他卫星导航系统和我国下一代卫星导航系统,应用前景广阔。
