三峡升船机锁定机构单点保压失效时小齿轮受力变化
2020-02-26李明,周维
李 明,周 维
(长江三峡通航管理局,湖北 宜昌 443002)
三峡升船机为全平衡垂直升船机,采用齿轮齿条爬升式驱动机构,船厢在处于对接或者上下运行时,不平衡的负载主要通过小齿轮→小齿轮托架→液气弹簧机构对接锁定机构,通过长螺母-短螺杆式安全机构满足平衡负载的要求。
小齿轮托架系统是船厢驱动小齿轮的支承系统,具有传递小齿轮荷载、适应塔柱和船厢变形从而保持小齿轮与齿条精确啮合、限制小齿轮荷载等功能。小齿轮托架系统由小齿轮轴、支承及导向机构、位移适应机构和液气弹簧机构组成。
长螺母-短螺杆式安全机构是升船机的安全保障机构,安装时二者之间在上、下两个方向均有60 mm的间隙。当船厢全平衡状态被破坏,造成安全机构螺纹副间隙变小,直至间隙完全消失,船厢的不平衡荷载经螺杆传递到螺母柱上。
船厢锁定机构的主要作用,是在船厢与闸首对接期间,承担船厢竖直方向的附加荷载。当竖直不平衡力超过锁定机构的设计荷载时,锁定块承载油腔油液溢流,船厢将在不平衡力作用下产生竖向运动,直至安全机构螺纹间隙消失,船厢不平衡力由安全机构承担。
小齿轮受力由安装在液气弹簧底部销轴上的传感器监测,当驱动机构小齿轮荷载超过1 560 kN时,监测和控制系统发出警报;当驱动机构小齿轮荷载超过1 580 kN时,主拖动系统电气制动;当小齿轮荷载达到1 650 kN时,液气弹簧动作,当安全机构螺纹间隙消失时,小齿轮荷载为2 200 kN。
1 研究背景条件下的机构动作
设定的背景条件为:船厢处于对接状态时,单个驱动点锁定机构上锁定块无法保压,船厢偏轻、水深偏浅。
由上述的机构原理,结合锁定机构和液气弹簧的液压回路设计特点[1-3],锁定机构上锁定块会出现行程退让,此过程中小齿轮的受力发生了变化。船厢锁定机构油缸行程与机构最终状态为:上锁定块完全缩回到位,下锁定块伸出到位,安全机构上螺纹面与塔柱螺母接触,液气弹簧上极限位。当偏载水深达到一定数值,最终状态下会引起液气弹簧上极限位、小齿轮受力超限,出现船厢倾斜。
2 受力分析与计算
2.1 小齿轮受力分析
由设定条件下机构的动作变化过程,锁定机构上锁定块在对接期间出现了退让,小齿轮的受力发生了变化。
锁定机构正常工作时,小齿轮只有与齿条啮合的残余荷载F余;锁定机构无法正常保压,出现连续行程退让时,小齿轮受船厢不平衡偏载F偏载,在本次故障状态下,当锁定机构出现退让导致锁定信号丢失后,再次执行锁定动作,此时只有下锁定块动作,上锁定块未发生动作。液气弹簧充压时,小齿轮受船厢不平衡偏载F偏载和液压力F液的合力F合作用。
研究设定条件下的相关参数为:液气弹簧油缸的内径为320 mm,活塞杆外径为200 mm,工作行程440 mm;锁定机构油缸内径为580 mm,活塞杆外径为320 mm,工作行程148 mm;船厢内水深一侧为3.366 m,另一侧为3.341 m。
2.2 船厢倾斜状态下水深偏载对锁定机构受力影响
船厢水平时,锁定机构承受±0.6 m内的偏载水深,各点受力均衡,但当船厢处于倾斜状态时,船厢各点受力分布产生了不均衡,此状态下,船厢偏轻时4#驱动点发生了倾斜,如图1所示。
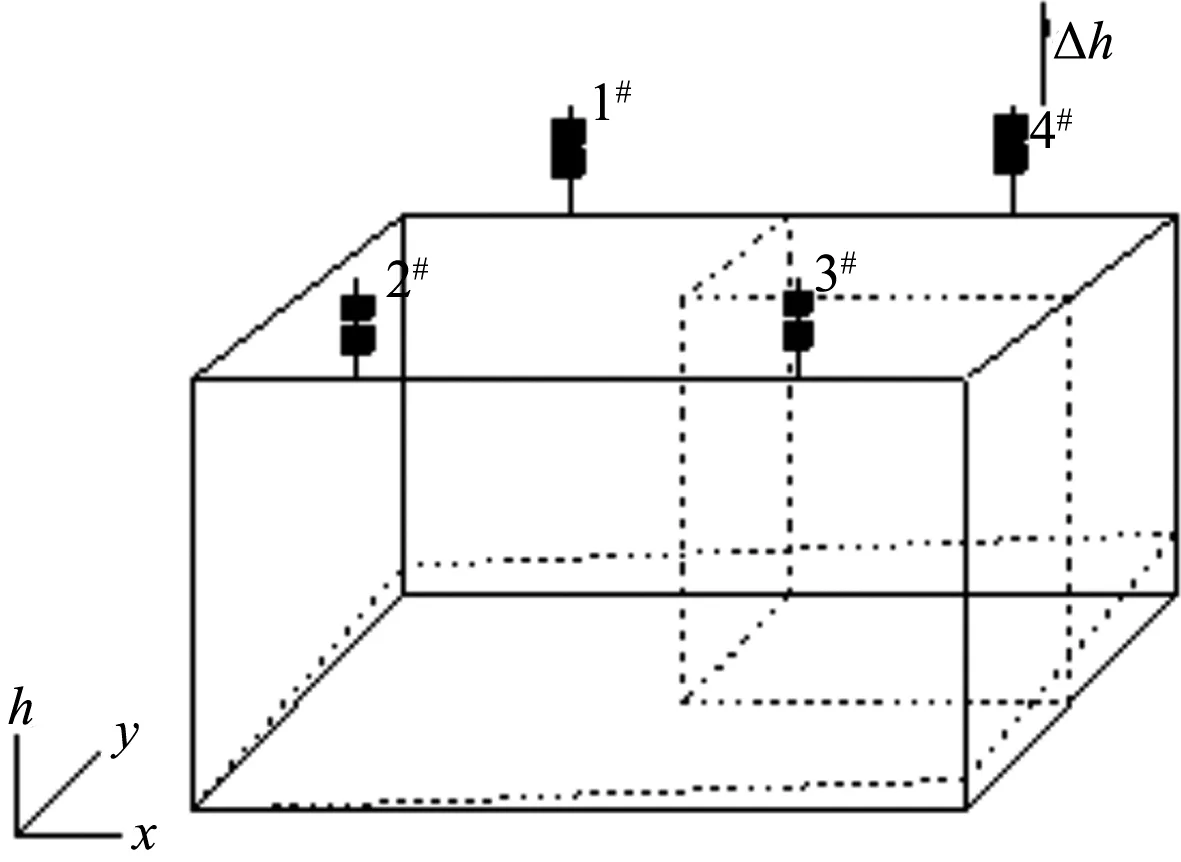
图1 船厢内水体示意
由于船厢总体水量f(x,y,h)不变,当4#点锁定机构向上倾斜Δh时,有:
(1)
式中:h1为船厢水平时的水深;h2为船厢倾斜时的最大水深。h2与h1关系为:
h2=h1+0.635Δh
(2)
船厢水平状态下,4#驱动点锁定机构的的受力偏载为:
(3)
式中:ΔV为单个驱动点水域体积变化;l1、l2为船厢水域的长、宽。
船厢倾斜Δh时,4#驱动点锁定机构的的受力偏载为:
(4)
船厢处于对接状态时,对接锁定机构承受全部的不平衡负载,此次船厢倾斜状态下,Δh=0.06 m,依据船厢水深数据,根据式(5)计算出水深造成的不平衡负载F偏载为989.604 kN;根据式(6)计算出产生的受力差值ΔF为36.965 kN;根据式(7)计算出对锁定机构产生的压力差ΔP[4]为0.201 MPa。
F偏载=ρΔVg4
(5)
ΔF=F1-F2=616.077×103Δh
(6)
(7)
式中:D为锁定机构锁定块内径;d为锁定机构中心杆外径。
由此可见,船厢倾斜导致其受力不均衡对锁定机构受力产生了影响,有理论上的区别,会影响锁定机构的承载安全系数。因此,平时运行中船厢的不水平也会对锁定机构和液气弹簧受力造成影响,但影响不大。
2.3 锁定机构失效时小齿轮受力计算
依据小齿轮托架的四连杆机构设计[5],液气弹簧与小齿轮受力约为1:2的关系,根据液气弹簧动作原理,根据式(8)计算出充压过程对小齿轮产生的液压力F液为1 688.064 kN。

(8)
式中:D为液气弹簧油缸内径;d为液气弹簧油缸活塞杆外径;P为已设定的压力值,取10.5 MPa。
处于下游对接状态时,由于船厢侧偏轻,液气弹簧充压过程中小齿轮上齿面与齿条下齿面接触啮合,充压过程产生的液压力与船厢偏载产生不平衡负载,对小齿轮施力方向一致,不考虑安全机构与螺母柱间隙消失后承担部分负载的情况下,根据式(9)计算出小齿轮所受合力最大值为2 677.668 kN。
(9)
此实际工况下,船厢出现了垂直方向上的行程退让,受安全机构旋转螺杆与螺母柱螺牙间隙的影响,小齿轮所受荷载未能达到最大值,部分负载由安全机构承担。
3 试验数据验证
对设定条件下的试验数据进行验证,驱动机构动作与分析一致,试验过程中检测到的液气弹簧底部销轴受力如图2所示,根据小齿轮托架的受力特点可知,小齿轮的受力最大值Fmax≈2 100 kN(为液气弹簧底部销轴受力的2倍关系),与计算值基本吻合。由安全机构承担的部分负载F安≈577.668 kN。
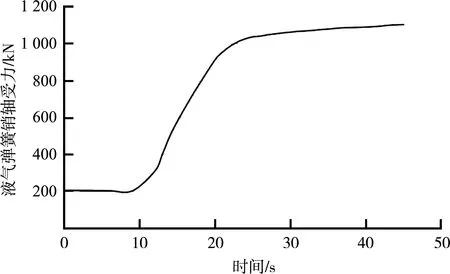
图2 液气弹簧底部销轴受力变化
4 结论
1)锁定机构的保压性能失效会引起船厢驱动机构的受力变化,导致连锁的机构动作,如船厢的倾斜、小齿轮的受力超限、液气弹簧的极限位等,因此需要及时发现、及时处理,以免造成严重后果。
2)当船厢发生偏斜时,由于4#点的上移,将导致4#点区域水深偏载比初始值大,会逐渐增加,直至安全机构动作。单个驱动点允许的水深偏载荷载应该按船厢上、下偏移60 mm计算,即以船厢1#~4#驱动点为整体计算锁定机构的动作偏载水深,与以单个驱动点计算单点锁定机构的动作偏载水深是不一样的,计算值有理论上的差别,所以船厢倾斜时,对锁定机构动作的允许偏载水深是有影响的,但计算结果显示此影响较小。