精确定位及计算机视觉技术在三峡、葛洲坝船闸智能引泊上的应用
2020-02-26蒲浩清
江 涛,陈 冲,蒲浩清
(长江三峡通航管理局,湖北 宜昌 443002)
船闸运行管理中对船舶进出闸、系缆靠泊的监管是运行人员的两项重要工作。三峡、葛洲坝船闸目前对于船舶过闸行为的监管主要依靠图像监控系统,存在下列问题:1)针对船舶超速、越界、靠泊不到位等方面的监测没有直观、量化的指标,可能导致观察偏差;2)在恶劣天气、低能见度、船舶遮挡等客观条件下,对于浮式系船柱系缆等环节无法进行准确的监测。根据葛洲坝船闸运行数据,1个有载闸次(以一号闸为例)整个流程的时间为60~80 min,其中设备运行时间仅为25 min,大量的时间消耗在船舶进出闸和靠泊的过程中,因此通过精确定位和计算机视觉技术的应用解决上述2个问题以提高船舶进出闸效率和船闸运行管理水平,并最终实现过闸智能引泊具有良好的前景[1]。
1 闸室内精确定位
1.1 卫星定位
基于全球定位系统进行单点定位,其精度一般为5~10 m。如果采用差分定位,理想状况下精度可达0.05 m。结合三峡、葛洲坝船闸所在区域的基站建设现状,考虑使用实时动态差分技术(RTK),利用卫星载波相位观测值进行实时动态相对定位。进行RTK测量时,位于基准站上的接收机通过数据通信链,实时地把载波相位观测值以及基准站坐标等信息发给附近的流动站,流动站的用户根据基准站及自己所采集的载波相位观测值实现实时相对定位,进而求得流动站点的实时三维坐标。
1.2 3D扫描全站仪定位
3D扫描全站仪是一种集水平角、垂直角、距离(斜距、平距)、高差测量功能于一体的测绘仪器系统,可作为数据采集装置,负责闸室内船舶动态数据的无接触采集。采集的数据通过线缆或无线局域网实时传输至数据服务器。数据服务器将同一时刻的数据按固定格式打包发送至数据处理终端。数据处理终端处理实时接收到的原始数据,并自动进行特定点(船首、船尾、船上系缆桩等)数据的提取,将成果发送至运行管理显示终端。运行管理显示终端根据闸室及其附属设施底图和闸室内动态船舶数据生成实时显示界面,供运行管理单位指挥船舶靠泊指定的区域和浮式系船柱,同时向用户终端实时发送经简易化处理后的导航数据供用户使用。
1.3 技术对比
2种定位技术都能实现高精度数据采集。全球定位系统数据是单点的采集,如果需要采集单个过闸船舶上的多个通航关键特征点,则须通过加密安装流动站点,以获取其三维坐标信息,多艘船舶须一致安装,或提前知晓过闸船舶的准确几何尺寸及流动站天线安装位置,通过计算获取特征点的三维坐标。这无形中增加了单船定位的数据成本和获取准确数据的基础工作量。全球定位系统实时差分定位效果,不仅受船闸水工建筑物遮挡卫星信号的影响,还受大面积水域电磁波信号的多次反射的干扰。
3D扫描全站仪则可通过非接触的方式,即时获取面状点云数据,只须在通航水工建筑物上合适地点固定安装设备、布设数据传输链即可。但3D扫描全站仪需要点对点直接可视,由于闸室水位起伏、闸室内过闸船舶首尾遮挡等问题导致获取的点云数据不全,存在遗漏。
1.4 定位方式选择
全球卫星定位系统实时差分定位综合效果不及全站仪,且需要船载终端的硬件支持,广泛应用推广成本较高;全站仪技术成熟,但对闸室内船舶间遮挡问题不能很好地解决,系统集成化程度相对较低。综合考虑航运管理的发展要求和技术更新的趋势,卫星精确定位系统在船闸智能引泊中具有更好的应用前景。
2 船闸智能引泊
2.1 系统结构设计
船闸智能引泊系统在结构上可分为基础层、数据层、服务层、业务逻辑层和展现层。
1)基础层:主要为系统提供设施的支持,包括硬件设置和网络环境部分。
2)数据层:主要包括船舶精确定位数据、船舶属性数据、用户数据、系统基础数据。
3)服务层:主要为系统提供数据接收、传输和存储服务,起到数据层与业务逻辑层直接的互动作用。
4)业务逻辑层:通过与数据层交互,获取数据后进行数据分析处理、业务逻辑运算等。
5)展现层:将系统分别展现给船方和船闸运行人员使用,分别为船舶的移动端、船闸运行调度系统及其他管理系统等。
2.2 应用展示设计
展示内容包括船闸水工建筑、船舶仿真图形、船舶行驶信息、管理交互界面等,考虑到三峡、葛洲坝水利枢纽的安全要求,向船方推送的信息不涉及建筑物坐标、高程等数据,仅以相对距离、仿真图形的形式进行展示(图1)。
智能引泊系统面对船方通过管理单位微信公众号或手机APP进行实时服务,面对管理单位则通过开发运行管理软件实现功能(表1)。
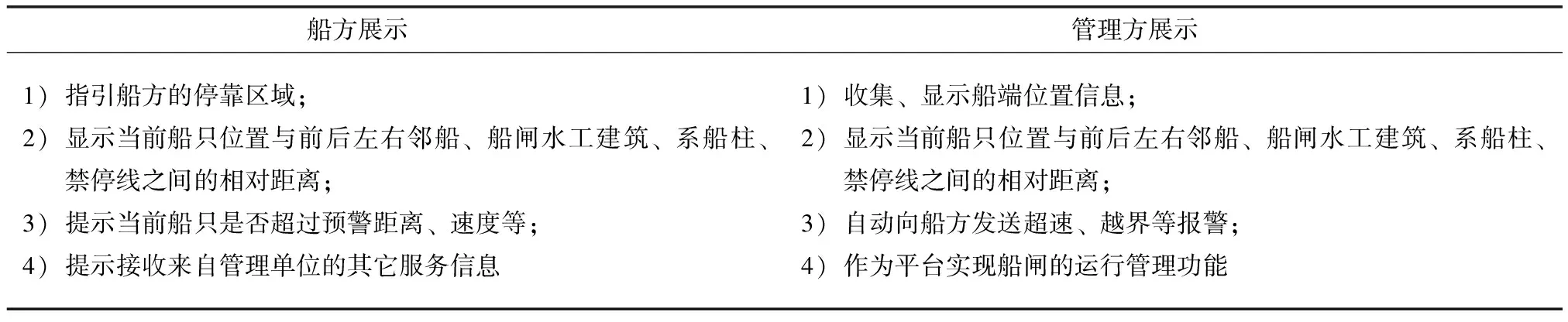
表1 智能引泊系统功能展示
2.3 应用难点
卫星定位在船舶智能引泊应用中最大的难点是船舶(终端安装位置)差异化的问题。过闸船舶卫星定位的结果为单点坐标,实际应用则需要定位船舶的整体轮廓,船舶定位终端安装位置的不确定性是定位轮廓的主要难点。对此须同时利用其他检测技术,如视频识别、激光扫描等,通过特征点(船头、船尾、两侧船舷)多点检测结合适当的算法计算单点坐标相对于整体轮廓的距离,最终计算出船舶轮廓的坐标信息。
3 卫星定位效果分析
3.1 实船测试
采用RTK技术的卫星定位在复杂外界条件下的稳定性和可靠性不及全站仪测量。为验证其实际效果,对在三峡船闸进行的北斗、GPS、GLONASS多星系实船试验相关测试情况进行分析(图2),测试设备主要包括1个基准站、1个移动站、2个多系统多频测试天线[2]。
测试全过程船舶位置的经纬度信息基本稳定连续,上行数据中因船在上闸首区域受事故门桥机遮挡存在个别断点,其精度在固定解的情况下达到厘米级。
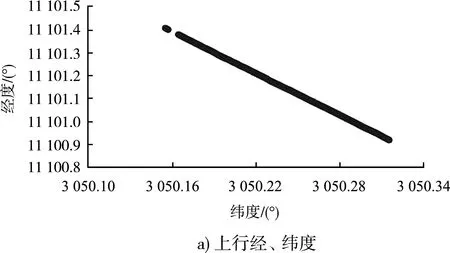
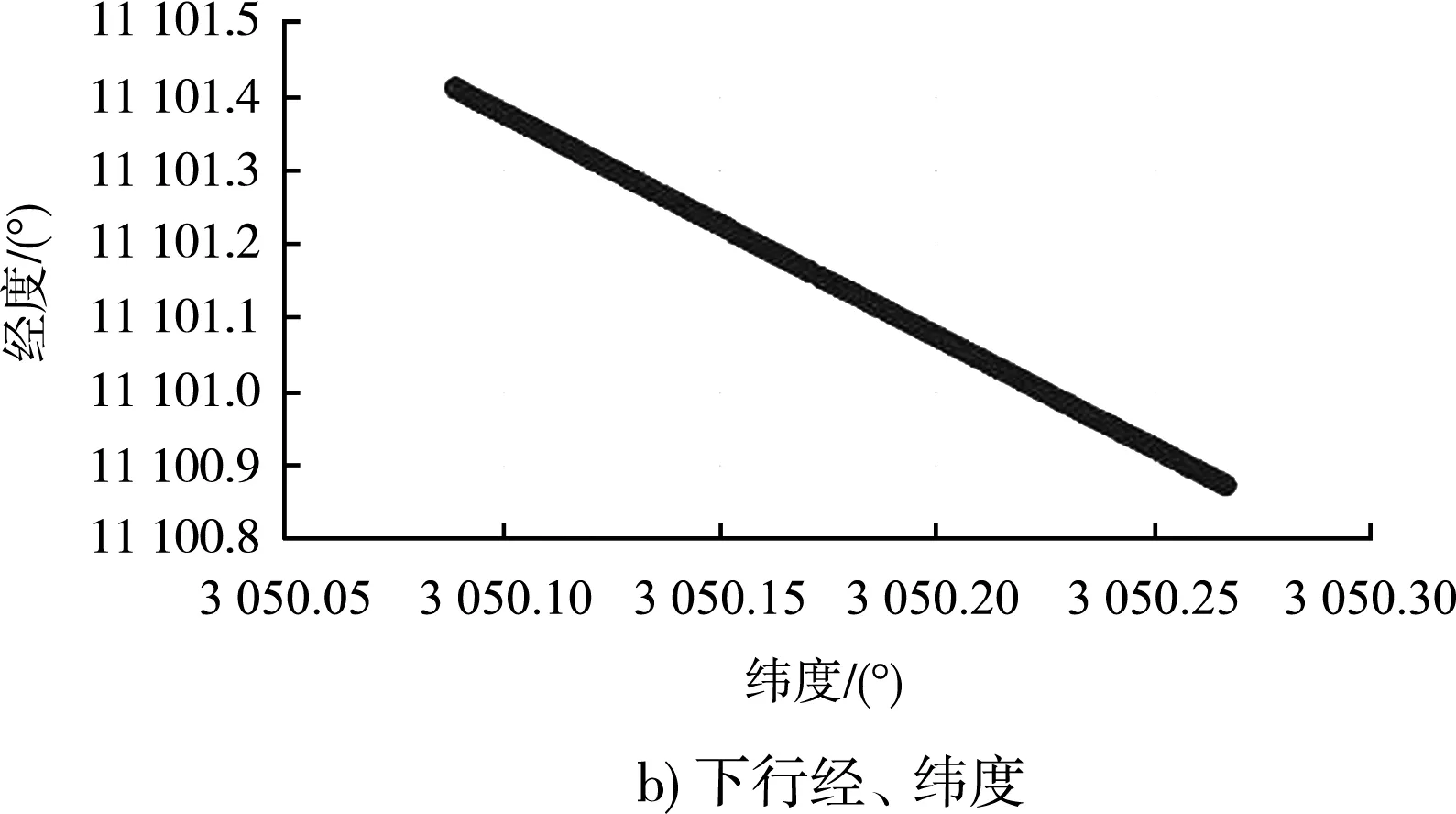
图2 上行、下行经纬度测试结果
解算相关方程需要4颗观测卫星,在实际测量过程中,上行和下行时移动站北斗卫星、GPS卫星和GLONASS卫星总数一般在14颗卫星左右,满足测量要求。上行测试一共4 785个历元,平均卫星数是17.05颗,下行测试一共6 186个历元,平均卫星数是15.7颗(图3)。
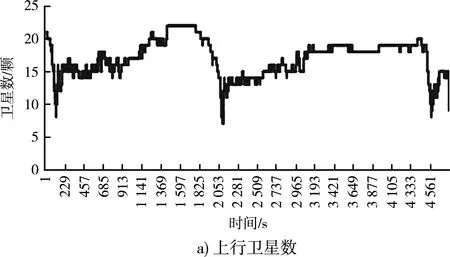
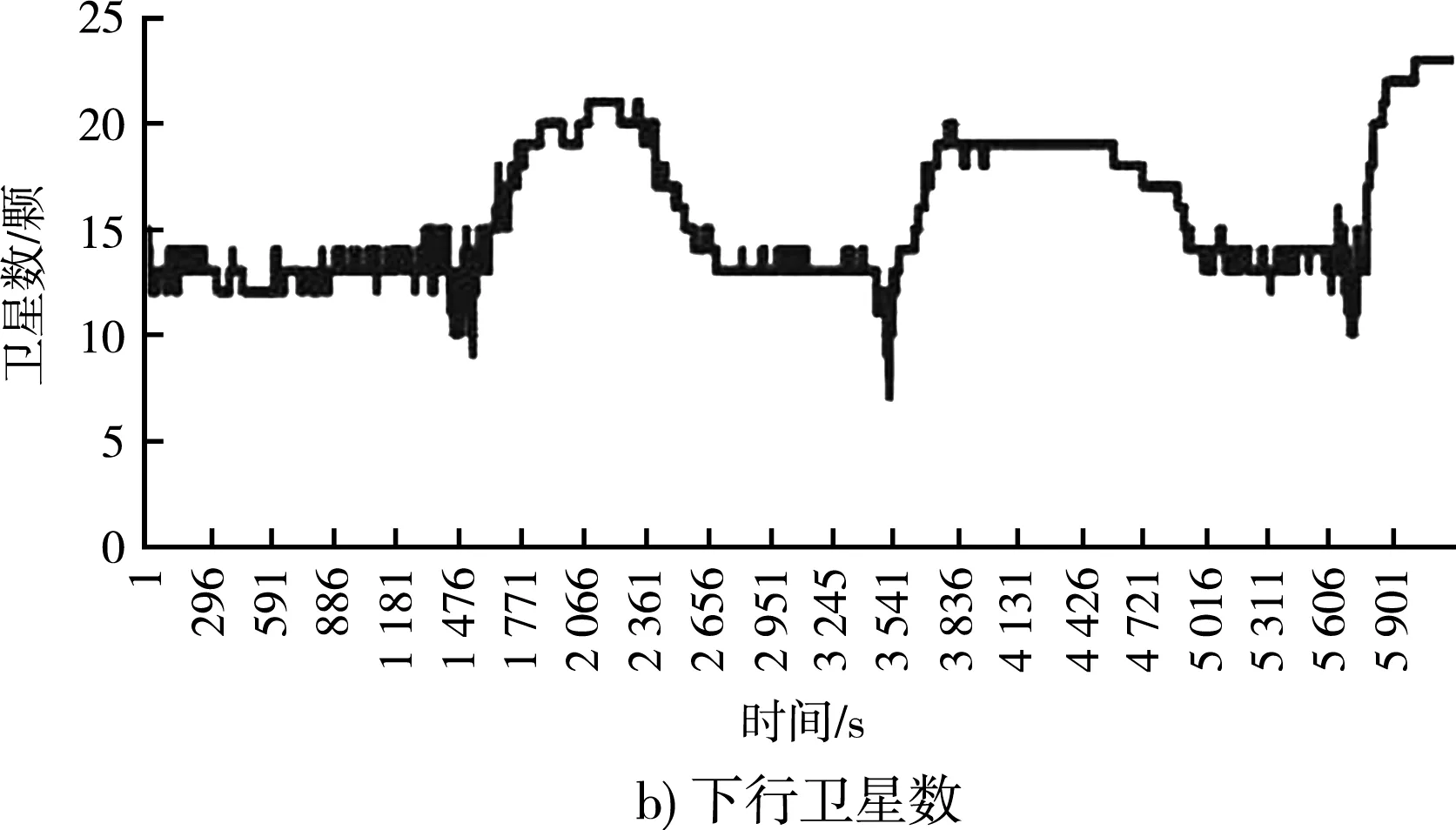
图3 上、下行卫星数测试结果
在测量过程中,在固定解的情况下测量精度可以达到标称精度,在浮点解的情况下精度会有一定程度的下降。根据实测数据统计,在上行4 785个历元中固定解状态有4 778个历元,7个历元处于浮点解的状态,在下行的过程中所有历元均处于固定解状态。
船舶航向通过船上的2个天线所在的方向与正北方向的夹角得出,在水位较低时航向失锁会使航向急剧变化,不过可以通过定位加算法进行补充。
3.2 极端状态分析
船舶在三峡、葛洲坝船闸上游水位时,对空情况良好,卫星信号稳定,但到下游水位时,由于闸墙、闸门的遮挡,对空面积大受影响,可能由于接收卫星数量不足无法定位。下面设计以葛洲坝2#船闸下游水位的极端不利条件进行近似计算。
地球半径r≈6 400 km,定位卫星轨道高度H在距地面2.0万~2.4万km,H取最低值2.0万km,可简化看成半径r(6 400 km)、R(2.64万km)的2个同心球。三峡流域通航船舶高度基本为10~18 m(接收天线高度),船体宽度为13~19 m,葛洲坝下游通航水位39.0~54.5 m,2#船闸闸面高程为70 m,闸室尺寸为280 m×34 m(长×宽)。现选取最低下游水位(39 m)、最小尺寸船型(10 m高、13 m宽)、闸门全部关终、最小可视上空的极端条件:
闸室纵向可视角α≈85°,闸室横向可视夹角β≈69°;
卫星轨道球面积S1=4πR2,地球外围切面形成的球冠面积S2=2πRH;
极端条件下的可视面积S3(R相对于r较大,忽略偏心造成的误差)S3≥(85180)×(69180)S2。
粗略得出:S3S1≥0.07,即极端条件下的可视面积相对于卫星轨道球面的大小,结合北斗、GPS和GLONASS各星系的卫星数量(包括非静止和静止)及轨道分布,对应估算出可视范围内3个星系总接收卫星数应不少于5颗。
3.3 定位效果
从测试数据可知,上行和下行时移动站北斗卫星、GPS卫星和GLONASS卫星总数一般在14颗左右,极端情况下也能满足6颗以上的解算要求,前述计算结果也大致符合,固定解比例情况均较好,在上行和下行过程中基本能解算位置信息,其经、纬度也无太大变化,与实地经、纬度一致,在整个测试过程中航向信息基本符合实际情况。
4 闸室内系缆检测
4.1 基于计算机视觉技术的监测原理
船闸浮式系船柱在闸室两侧的闸墙轨道中随水位上下浮动,工作环境恶劣,检修时须垂直吊出,不便于直接在系船柱工作区域内或附近安装传感器及敷设线缆,考虑设备布置以及后期维护的便捷,建议利用计算机视觉技术对画面局部(系船柱位置)进行定点图像分析的方式实现监测功能。该系统设置适当位置的摄像点,针对闸室两侧的浮式系船柱设计预置点,利用船闸工控系统运行指令控制摄像机转动、变焦、拍摄预置点图像(浮式系船柱),图像文件在终端进行数据处理,通过opencv、halcon类函数库对系缆前后的系船柱局部图像进行特征检测对比,输出监测及报警信息[3]。系统结构见图4。
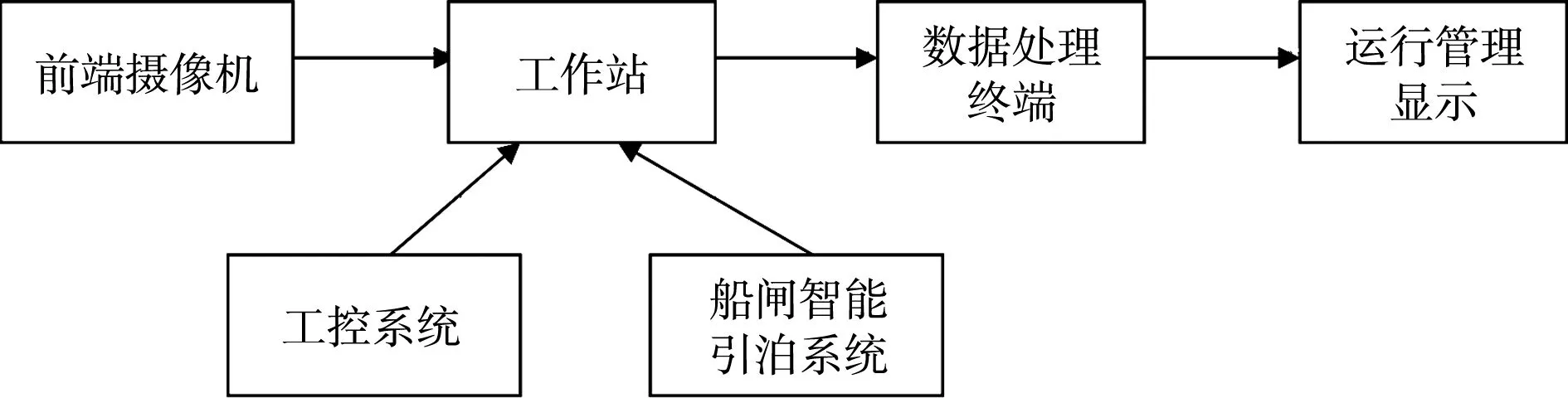
图4 系船柱监测系统结构
4.2 应用难点
有效的视频数据采集在实际应用中有2个技术难点:1)三峡、葛洲坝船闸单个闸室尺寸为280 m×34 m,观测范围较大,浮式系船柱数量较多,上、下游水位变化频繁,摄像机在多个预置点间频繁转动、调整、变焦拍摄对云台电机及传动部分的稳定性、耐用性要求很高;2)浮式系船柱轨道布置在闸室两侧闸墙内,图像特征范围很小,同时为避免船舶的遮挡和靠泊时对闸墙边安装设备的刮蹭,摄像机安装位置受限,造成图像处理的困难(图5)。针对上述问题须合理设置摄像机的点位并进行分区监测,增加整个图像内的特征信息如特殊颜色的标靶或特征形状的目标,并改进算法提高目标识别的效率,减少前端设备的工作压力。

图5 布置在闸墙内的系船柱
5 结论
1)采用RTK技术的多星系卫星精确定位基本可以忽略闸室低水位极端条件对卫星信号质量的影响,所需的船舶航向、轮廓定位等重要数据均可通过算法进行补充,满足建设数字船闸智能引泊系统的必要条件。
2)采用图像识别监测浮式系船柱因其摄像机安装位置的灵活性,在功能设计、建设投资、后期维护方面都有明显的优势。
3)上述方案在技术成熟性和市场风险方面较为可控,已具有一些在铁路、港口领域的类似应用和实船测试数据的支撑,是提高船闸运行管理水平、实现智能引泊的一个重要发展方向。