基于精准步态下肢康复机构的优化设计
2020-02-24李志强王良诣
李志强, 王良诣, 王 勇
(合肥工业大学 机械工程学院,安徽 合肥 230009)
0 引 言
由于疾病灾难及老龄化导致的下肢运动障碍患者越来越多,康复医学与机器人学结合的康复机器人技术正逐渐成为国内外研究的热点[1]。物理治疗是恢复患者肢体运动功能的主要手段,训练方法主要有传统步行训练和机器人辅助步行训练[2]。传统步行训练一般是指患者在理疗师的指导下通过人扶着或拄着拐杖步行[3]。机器人辅助步行训练主要有悬吊减重式步态训练、外骨骼穿戴式训练、坐卧式减重训练等。悬吊减重式步态训练是悬吊躯干以减轻下肢承重,同时踝关节、膝关节及髋关节在机械跑台或脚踏板的带动下在矢状面内运动的一种训练方法,瑞士Hocoma A G和苏黎世联邦理工大学联合研发的Lokomat[4]及上海大学研发的下肢康复机[5]、清华大学的GRTS[6]都是采用这种方法来实现步态训练;外骨骼穿戴式训练是运用仿生学原理设计的多驱动康复训练机器人,通过外骨骼机构提供驱动力以达到步态训练的目的,如荷兰特温特大学设计的LOPES系列康复机器人、新加坡国立大学设计的外骨骼康复机器人、合肥智能机械研究所与东南大学联合设计的穿戴式康复机器人、北京航空航天大学设计的下肢康复训练机器人[7-11];坐卧式减重训练是通过固定在座椅上的机械臂来训练患者下肢,采用该训练方法的有瑞士SWORTEC公司开发的MotionMaker康复机器人[12]、燕山大学设计的康复机器人[13]等。
传统步行训练耗时,成本较高,而且因体力有限,患者得不到长时间足够频次和强度的康复训练。悬吊减重式步态康复机器人以及外骨骼穿戴式步态康复机器人对于初期患者和下肢运动功能彻底丧失患者的训练效果不是很好,使用不当甚至可能会造成二次伤害。坐卧式减重机器人为实现人正常行走时的下肢运动规律,设计成多驱动结构,该结构复杂、造价昂贵,不适合于家庭康复[14]。
针对上述问题,本文根据步态康复训练理论,以精准实现人正常步行时髋、膝关节运动规律为目的,设计一种四杆机构,这种机构能精准地实现正常步行时髋、膝关节运动规律。与外骨骼穿戴式下肢康复机器人相比,该机构具有驱动少、容易控制、操作简单等特点,适合于家庭及社区步态康复训练。步行时髋关节和膝关节运动规律具有复杂性及高度耦合性[11],单自由度机构实现其运动规律较为困难。通过对运动学分析,寻找出步态轨迹与髋、膝关节的角度耦合关系;通过提高M点运动轨迹与正常行走时踝关节运动轨迹的重合度可精准复现正常步行时髋关节和膝关节运动规律;为解决步态轨迹难拟合问题,采用21个不相等的曲柄角度作为设计变量,设计了优化的步态康复训练机构;最后通过仿真实验验证了该机构能使下肢按照人体标准的步态进行运动。
1 机构模型
人体多刚体假设理论[15]提出,人体是由多个刚体组成,它们通过铰链连接,人体的步态运动可看成刚体之间的相互运动。因为步行时下肢各关节主要在矢状面内运动,所以针对下肢运动障碍患者的步态康复训练的主要研究内容是髋关节、膝关节、踝关节在矢状面的协调运动[6]。本文研究重点为髋关节和膝关节的康复。
本文所设计的组合式单自由度康复机构数字样机模型如图1所示,该结构主要包括座椅、康复执行机构和下肢固定机构。其中康复执行机构是由连杆、摇杆、曲柄杆和座椅构成的平面四杆机构;下肢固定机构包括大腿固定支架、小腿固定支架和脚踏板。
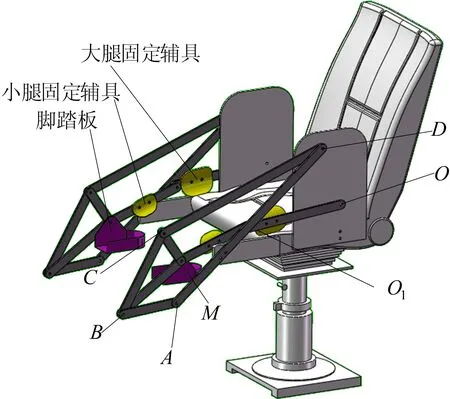
图1 座式下肢康复训练器机构数字样机模型
将机构的数字样机模型简化,得到的原理图(即机构的数学模型)如图2所示。
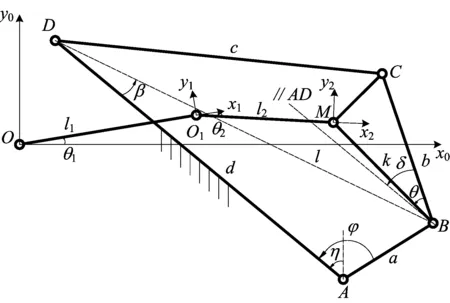
图2 座式下肢康复训练器机构结构简图
坐标系Ox0y0z0(z方向垂直纸面,图中省略,下同)固定在座椅上,A、D为座椅上两点,M为脚踏铰接点;AB处为曲柄杆,长度为a;BC处为连杆,长度为b;CD处为摇杆,长度为c;AD处为机架,长度为d;长度为k的杆BM与BC夹角为θ;机架AD与y0轴的夹角为η;θ1为人体髋关节运动角度,θ2为膝关节运动角度,取逆时针方向为正;OO1、O1M处分别为大腿固定辅具和小腿固定辅具,长度分别为l1、l2。该机构的自由度为1。
2 运动学分析
本文设计是在一个平面四杆机构的基础上串联一个两自由度的下肢固定机构,使之成为一个封闭的串联组合式机构。由人机工程学原理可知,下肢固定机构应与人体下肢的尺寸相等,为已知构件,因此在对支链ABCD进行运动分析之前,先对支链OO1M进行正逆解分析。
2.1 位姿正解
本文采用D-H坐标变换法对支链OO1M进行正解分析。支链数学模型见图2,其坐标系间的变换矩阵为:
(1)
(2)
坐标系Mx2y2z2以坐标系Ox0y0z0为参考,3个坐标轴单位矢量方向余弦列阵分别为[ixiyiz]T、[jxjyjz]T、[kxkykz]T。其中ix=cos(θ1-θ2),iy=sin(θ1-θ2),iz=0;jx=-sin(θ1-θ2),jy=cos(θ1-θ2),jz=0;kx=0,ky=0,kz=1。则位姿矩阵方程为:
(3)
2.2 位姿逆解
根据(3)式,等号两边矩阵相同位置元素相等,可得非线性方程组为:
Mx=l1cosθ1+l2cos(θ1-θ2)
(4)
My=l1sinθ1+l2sin(θ1-θ2)
(5)
(4)式、(5)式为支链的运动学方程,即踝关节的运动方程。把(4)式、(5)式分别平方后相加,可得:
(6)
则有:
cosθ2=S
(7)

为使(7)式有解,S值应满足-1≤S≤1。在训练时需满足∠OO1M介于0°~180°,即0≤θ2≤180°,若不在膝关节活动范围内,则会使下肢受到二次伤害。由(7)式可得:
(8)
再由(7)式、(8)式得到:
(9)
由(4)式、(5)式可得:
Pcosθ1+Qsinθ1=Mx
(10)
Psinθ1-Qcosθ1=My
(11)
其中,P=l1+l2cosθ2;Q=l2sinθ2。由(10)式、(11)式解得:
sinθ1=(PMy+QMx)/(P2+Q2),
cosθ1=(PMx-QMy)/(P2+Q2),
(12)
由支链OO1M的正逆解分析可知,当末端M的坐标一定时,髋、膝关节角度θ1、θ2的值是唯一确定的,而θ1、θ2即反映了髋、膝关节的运动规律。因此,通过提高M点运动轨迹与正常行走时踝关节运动轨迹的重合度,可更加精准实现正常步行时髋关节和膝关节的运动规律。
2.3 运动分析
对支链ABCD进行运动分析,由图2所示的数学模型可知M点的运动方程为:
(13)
其中,Ax、Ay为A点横、纵坐标;δ为杆BC、AD之间的夹角;θ为∠MBC;η为杆AD与竖直方向的夹角;φ为曲柄AB的转角;β为∠ADB;其余符号含义同第1节,角度取逆时针方向为正。δ、β、BD长度l的表达式为:
3 机构尺寸优化
由运动学分析可知,训练时髋、膝关节的角度θ1、θ2只与M点坐标有关,因此要使坐姿状态下髋、膝关节的角度运动规律与特定步态的关节角度运动规律一致,只需使脚踏铰接点的运动轨迹与人体特定的步态轨迹完全吻合。然而实际情况下,两轨迹很难完全重合,只能多点近似吻合,因此需对机构进行尺寸优化。由于步态轨迹拟合较为困难,为了提高优化的收敛精度且便于驱动电机的控制求解,本文采用一种基于曲柄转角为设计变量的全局Powell平面四杆机构优化方法求解机构的尺寸。
3.1 优化数学模型
(1) 设计变量。将不同时刻的曲柄转角作为设计变量,则优化模型的设计变量为:
X=[abcdθkAxAyηφ1φ2…φn]T
(14)
其中,n为待拟合点个数。
(2) 目标函数。由位姿逆解分析可知训练时人体髋、膝关节角度θ1=θ1步态、θ2=θ2步态可等效为Mx=Mx步态、My=My步态,即脚踏铰接点M点的轨迹与给定步态轨迹重合。在两轨迹上取n个具有代表性的点,将这n个点两轨迹坐标值误差的平方和作为目标函数,即
(15)
其中,Mxi、Myi为脚踏铰接点M轨迹上的第i个点的横、纵坐标;Mxi′、Myi′为给定已知步态轨迹上的第i个点的横、纵坐标。
(3) 约束条件。平面四杆机构形成曲柄的条件为:
(16)
机构传动角在20°~160°之间,即
(17)
当支架OO1、O1M共线时,机构处于死点位置,将不能连续运动或者失稳,则M点距原点O的距离应小于l1与l2之和,即
i=1,2,…,n
(18)
3.2 优化实例
根据GB 10000-88,以身高1 604 mm的人体肢体尺寸为例,大腿长度为436 mm,小腿长度为334 mm,因此O1O2、O2M长度分别为436 、334 mm。
将文献[16]中人体平地常速行走的步态数据代入运动方程(4)式、(5)式可得踝关节点轨迹。取21个表达轨迹特征的点,则共有30个设计变量,即
X=[abcdθkAxAyηφ1φ2…φ21]T。
基于全局优化的Powell算法,设定各变量的取值范围为:a,b,c,d,k∈[1,1 000];Ax,Ay∈[-1 000,1 000];θ,η∈[0,2π];φ1,φ2,…,φ21∈[0,360°]。
设置目标函数值收敛精度ε=10-6。优化所得结果见表1、表2所列。曲柄做循环的圆周转动,由表2可得曲柄的在1个周期内的转动规律表达式为:
φ=943.5sin(2.874t-0.570 6)+
713.1sin(3.514t+2.293)+2.238×
sin(16.28t-19.03)
(19)
其中,0≤t 表1 机构尺寸优化结果 表2 转角φ优化结果 (°) 运动仿真得到的踝关节运动轨迹如图3所示。运动仿真得到的髋、膝关节角度变化曲线如图4所示。 图3 踝关节运动轨迹 (a)髋关节 (b)膝关节图4 髋关节、膝关节角度变化曲线 由图3、图4可知,仿真轨迹和正常步态轨迹基本重合;仿真的髋、膝关节活动度未超过人体步行时的髋、膝关节活动度范围;仿真结果中的髋、膝关节角位移和步行时的运动规律基本一样,角度误差小于5°。 由图4可知,仿真结果中的髋、膝关节角位移在0.1~1.0 s时间段内的一致性比同一周期内起始和末尾时间段的好,在0.6~0.9 s时间段内髋、膝关节的角位移与实际步态中的重合度大于98%。由前文的机构位姿逆解可知,髋、膝关节的角位移在0~0.1 s、0.9~1.079 s两时间段误差比较大,主要原因是在步态周期的始末位置处仿真轨迹与步态轨迹存在一定的偏差。 本文以1 604 mm身高的人体尺寸为例,对机构进行优化设计。在后续的研究中将对不同身高人群进行机构尺寸优化,并使机构尺寸可调,以适应不同身高人群、不同康复训练模式的要求。同时将制作物理样机用于临床试验以验证机构步态康复的有效性。 针对下肢瘫痪患者步态康复的需求,本文设计了一种具有创新性的单自由度组合式坐姿下肢康复机构。对该机构进行运动学分析,结果表明,通过提高M点运动轨迹与正常行走时踝关节运动轨迹的重合度,能更加精准地实现正常步行时髋关节和膝关节的运动规律。为此建立了机构尺寸优化的数学模型,并采用一种以不同曲柄转角为设计变量的全局Powell平面四杆机构优化方法,求解出了机构的最优尺寸。通过运动学仿真得到髋、膝关节角位移变化规律曲线,结果表明髋、膝关节角度误差小于5°,在0.6~0.9 s区段关节的角位移与实际步态中的重合度大于98%。该下肢康复机构能够满足患者在家庭及社区中对精准步态康复的需求。

4 运动仿真



5 结 论
