基于同步的有向相互依存网络骨干结构识别
2020-02-21陈洁怡涂俐兰
陈洁怡,涂俐兰,余 东
(武汉科技大学冶金工业过程系统科学湖北省重点实验室,湖北武汉 430065)
(武汉科技大学理学院,湖北武汉 430065)
1 引言
2008 年美国的关键基础设施报告指出“理解跨部门基础设施系统之间的相互依赖和相互作用, 对于评估整个关键基础设施系统的恢复能力或鲁棒性至关重要”[1].为了更好地理解现今社会中的重要的基础设施系统之间的相互作用, Buldyrev 等人[2]首次在数学的框架下研究了两个相互依赖的设施系统的协调性与级联失效.他们的分析方法主要基于单网络渗流和单网络结构, 从而打开了利用复杂网络工具研究相互依赖设施系统的大门.
相互依存网络是由若干不同性质、不同尺度的复杂网络由相互依存关系耦合成的网络,所以它仍然可看作是复杂网络, 是一种网络中的网络.在过去的二十年里, 复杂网络科学中的相互依赖、相互作用研究领域吸引了大批科技工作者的关注[3−13].不只是因为这种相互依赖关系存在于基础设施系统中, 它还广泛存在于社会、经济、工程和生物系统中.网络的相互作用关系由网络的拓扑结构来表达.网络的结构决定了网络的功能.相互依存网络的结构包括子网络结构和骨干结构(即子网间结构).相比较而言, 骨干结构扮演着更重要的角色.一个自然的且带有挑战性的问题是: 对于相互依存网络, 它的骨干结构是怎样的, 如何识别, 如何挖掘?
结构信息的挖掘问题一直是复杂网络科学中的热点问题.它主要涉及两个问题: 一是结构预测问题, 即从现有观察中出发, 挖掘网络中的缺失信息, 进行网络结构演化预测; 二是从动力学表征挖掘网络结构.迄今为止, 网络结构信息挖掘和识别已经有一系列的研究成果[14−25].Zhang 等人[14]通过结合新的模块化功能来识别复杂网络中的重叠社区; Liu 等人[15]探讨了具有时滞的一般不确定复杂网络的结构识别和参数识别; Sun 等人[16]利用复杂网络的节点和连边的特征来描述蛋白质, 通过分析、识别蛋白质网络的结构获得蛋白质结构的最好表达; Wu 等人[17]研究了在随机噪声下, 时滞/非时滞复杂网络的未知结构恢复问题; Gui等人[18]提出了一种新的可扩展算法, 用于识别全基因组基因调控网络(GRN) 结构; Zhou等人[19]通过引入辅助系统, 提出了两种具有耦合时延的复杂时空网络的有限时间拓扑识别方法.
一直以来, 利用动力学来挖掘结构信息是主流方法, 它的基本思想是基于同步控制.文献[20–27]都是通过设置合适的控制器, 在使得复杂网络达到同步的同时, 获得各种复杂网络结构的识别.
然而, 上述现有结果的研究对象都是单个的复杂网络, 现今, 对相互依存网络甚至网络的网络的结构识别研究少之又少[28].基于以上, 本文将研究由两个子网构成的有向相互依存网络的骨干结构识别问题.在该网络中, 本文只考虑子网间的耦合连接, 不涉及子网的内部结构.基于李雅普诺夫稳定性理论、自适应反馈控制技术和LMI 方法, 本文对响应网络施加合适的自适应控制器, 从理论上提出了使得驱动网络和响应网络达到同步的充分条件.这些条件简单易行, 而且利用这些条件, 可同时识别出驱动网络中的有向骨干结构.
2 预备知识
给定一个有向相互依存网络, 它由节点数分别为N的子网G1和子网G2在相互依赖关系下构成.网络的状态方程可表示为
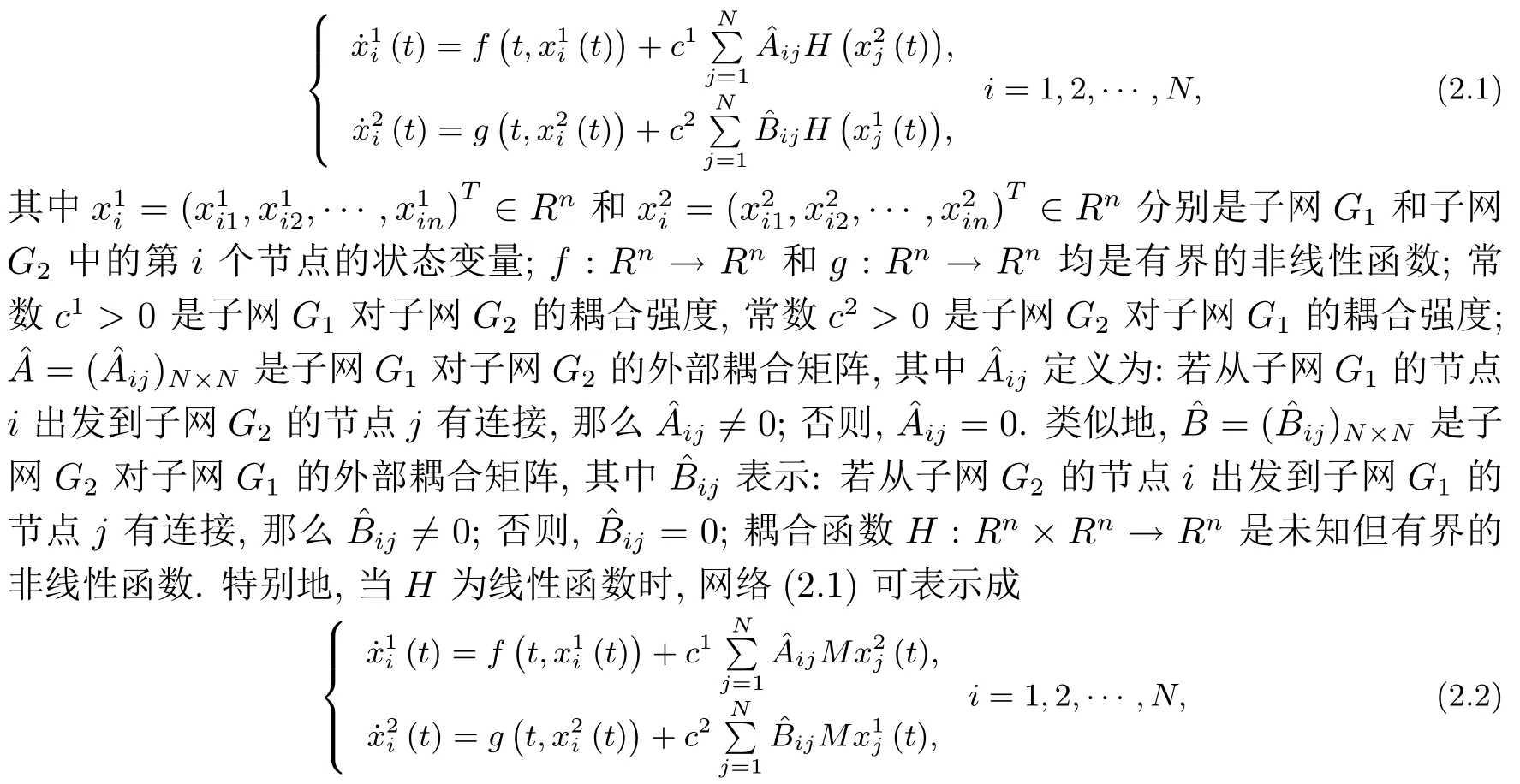
其中M是具有适当维数的矩阵.
注1本文的研究对象是网络(2.1).本文的研究目标是: 在控制器的作用下, 如何识别出网络(2.1) 的骨干结构即外部耦合矩阵
为了识别出骨干结构, 本文将在李雅普诺夫稳定性理论的框架下, 利用自适应同步控制技术和LMI 方法, 使得网络达到同步的同时, 获得拓扑结构的识别.假设网络(2.1) 为驱动网络, 再设响应网络为

注2在结构识别过程中, 本文的研究目标转化为构造出合适的自适应控制器和使得驱动网络 (2.1) 和响应网络 (2.3) 达到自适应同步, 即满足


注3若令则本文结构识别的目标是在获得式(2.6) 成立的同时, 满足

为了更好地说明所做出的的理论结果, 下面给出本文需要用到的几个假设和引理.
假设1本文总假设I为具有适当维数的单位矩阵, 同时设文中所用到的范数为2 -范数.
假设 2设F(t,e(t)) =f(t,y(t))−f(t,x(t)),G(t,e(t)) =g(t,y(t))−g(t,x(t)), 则由函数的有界性, 假设存在正数L1和L2, 使得成立.
假设3若令类似地, 假设存在常数L3>0, 总有
引理1[29]对于任意向量x,y ∈Rn和正定矩阵T ∈Rn×n, 下面的矩阵不等式成立

引理2[30]假设Q(x) =Q(x)T,R(x) =R(x)T和S(x) 都是x的矩阵函数, 下列线性矩阵不等式等价于下列条件中的任何一个
(1)R(x)<0,Q(x)−S(x)R(x)−1S(x)T<0,
(2)Q(x)<0,R(x)−ST(x)Q(x)−1S(x)<0.
3 主要结果
基于李雅普诺夫方法、自适应控制技术和LMI 方法, 本节获得驱动网络(2.1) 和响应网络(2.3) 达到自适应同步的充分条件, 从而识别出驱动网络(2.1) 的骨干结构.
定理1当假设1、假设2 和假设3 成立时, 若存在两个正定的矩阵P和Q使得

成立, 那么网络(2.1) 和网络(2.3) 在控制器
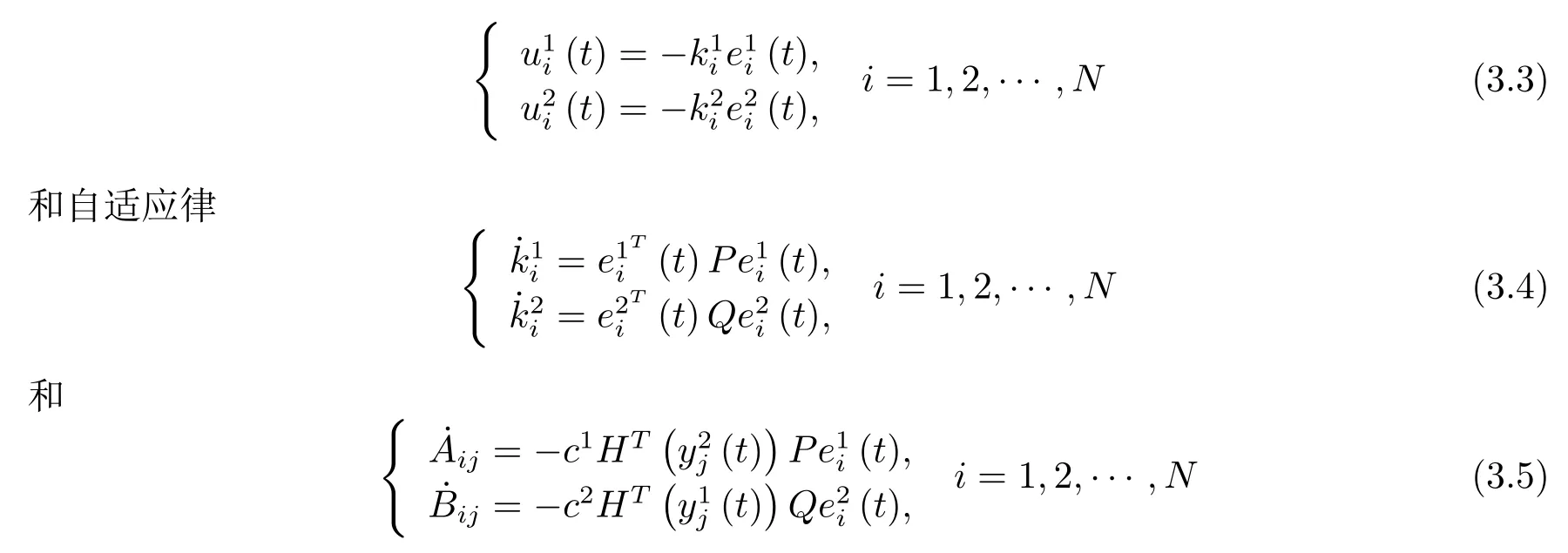
证由网络(2.1) 和网络(2.3) 以及假设1 和假设2, 可得网络的节点误差状态方程为

构造一个李亚普诺夫函数为
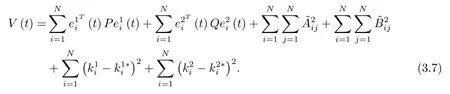
则由控制器(3.3) 和自适应律(3.4) 和(3.5), 关于误差系统(3.6) 的导数有
所以整理得
根据引理1, 有
且

所以不等式(3.8) 可化为

整理后可得

所以若

定理1 提出了当耦合函数为非线性的情况下, 网络(2.1) 和网络(2.3) 达到自适应同步的充分条件.当耦合函数H(·) 为线性函数时, 就不需要用到假设3, 此时, 定理1 中的条件相对来说更简单些, 因此得以下推论1.
推论1在假设1 和假设2 成立的条件下, 若存在两个矩阵P>0 和Q>0 使得不等式
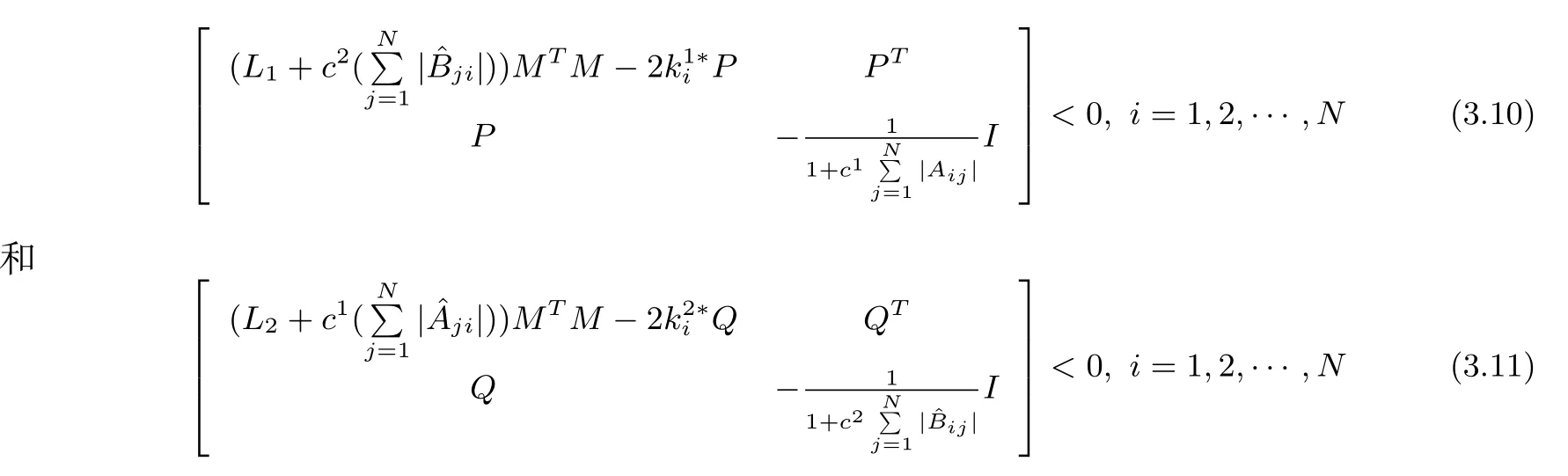
成立, 那么网络(2.2) 和网络(2.3) 在控制器(3.3) 和自适应律(3.4), (3.5) 的作用下达到自适应同步.
4 数值模拟
为了验证定理1 的可行性和有效性, 本节将对一个由两个子网构成的有向相互依存网络(2.1) 和(2.3) 进行数值模拟.因为节点个数过多, 对骨干结构的识别就显得过于复杂, 所以在本节中, 为了简单起见, 设网络节点个数为8, 其中子网G1和子网G2的节点个数分别为4.同样地, 对于网络(2.1) 和(2.3), 本节只考虑子网间的耦合, 不涉及到子网内部的耦合.对于子网G1, 设它的每个节点动力系统都是Lorenz 系统

其中a1,a2,a3是实数.当a1= 10,a2= 8/3,a3= 28 时, Lorenz 系统是混沌的.同时, 设子网G2的每个节点动力系统为Chen 系统
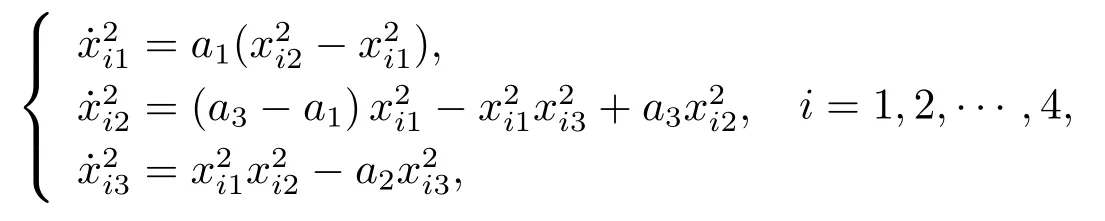
其中a1,a2,a3是实参数.当a1=35,a2=3,a3=28 时, Chen 系统处于混沌状态.由Lorenz系统和Chen 系统的特点, 可知存在L1=L2=60 满足假设2.在以下所有的数值模拟中, 设子网G1和子网G2的外部耦合矩阵为
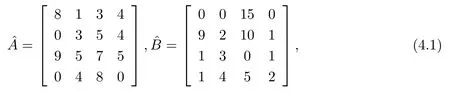
非线性耦合函数为H(x(t))=(x1(t),x2(t),sin(x3(t)))T.此时,可设L3=1 满足假设3.再设子网间的耦合强度c1=c2=0.5, 驱动网络(2.1) 和响应网络(2.3) 的节点(i=1,2,···,4)的初始值分别为
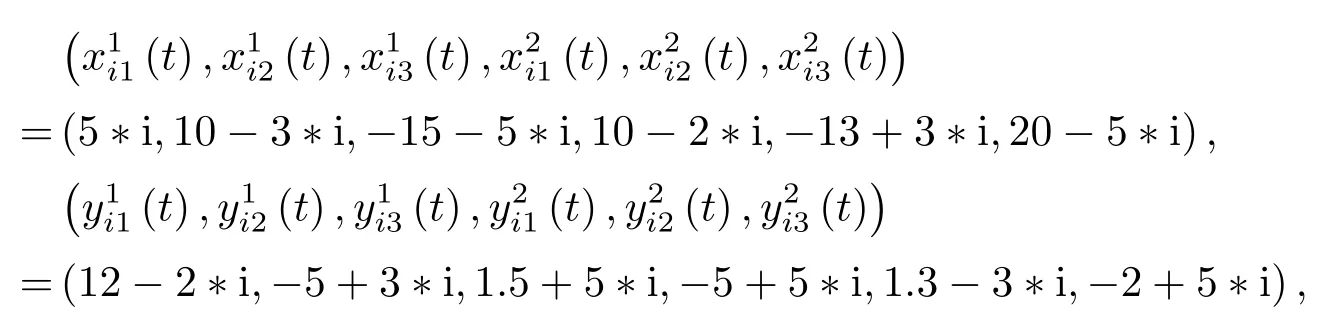

满足定理1 中的条件(3.1) 和(3.2), 从而从理论上保证了网络(2.1) 和网络(2.3) 能够达到自适应同步.在上述条件下, 利用Matlab 软件, 本节获得了子网G1和子网G2的误差轨迹图,如图1 和图2.图1 中的第二和第三个子图和图2 均表明了误差状态变量在控制器的作用下,很快趋于零, 也即驱动网络和响应网络很快达到了渐近同步.而图1 的第一个子图表明误差虽然在零的附近有很小的摆动, 但是它的轨迹仍然是有界的, 也就是说它在零的附近是渐近稳定的.
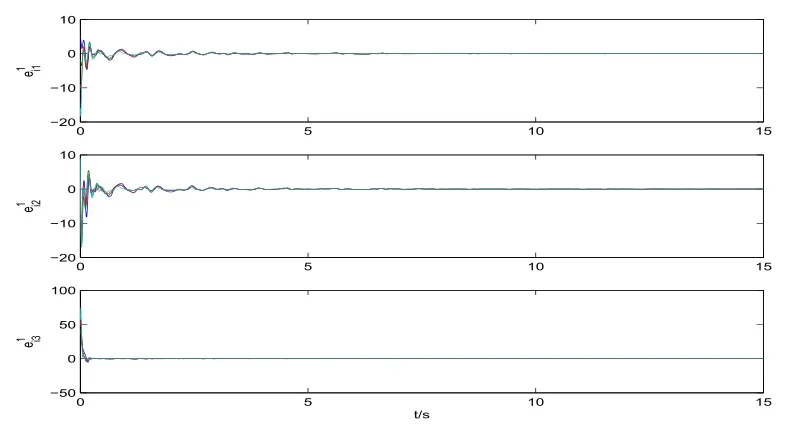
图1: 子网G1 的误差状态变量轨迹
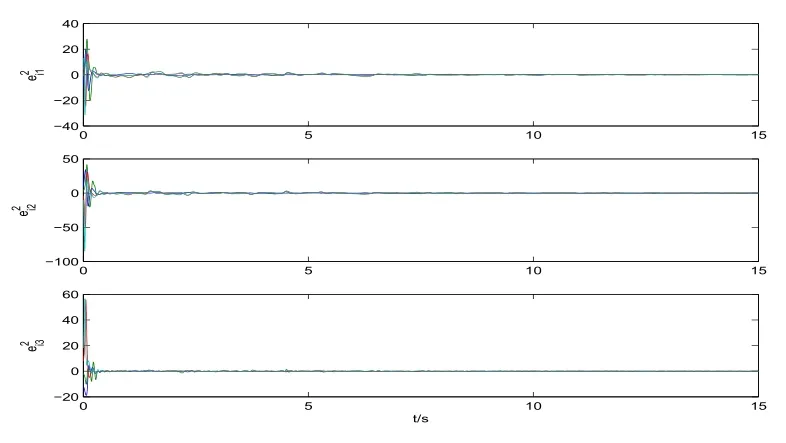
图2: 子网G2 的误差状态变量轨迹
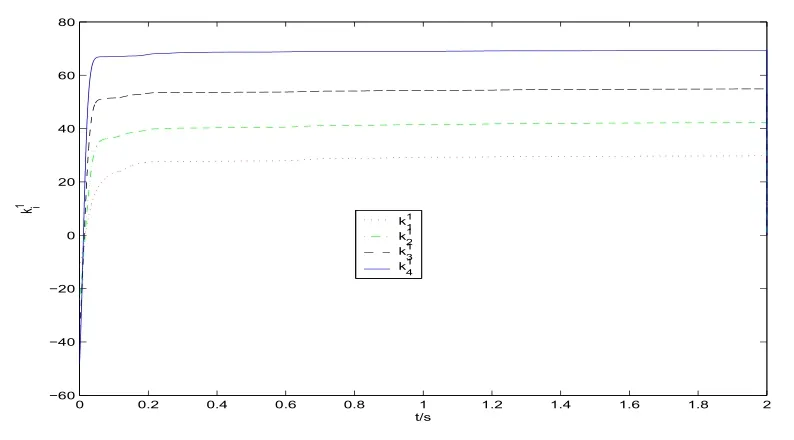
图3: 子网G1 的反馈增益运动轨迹
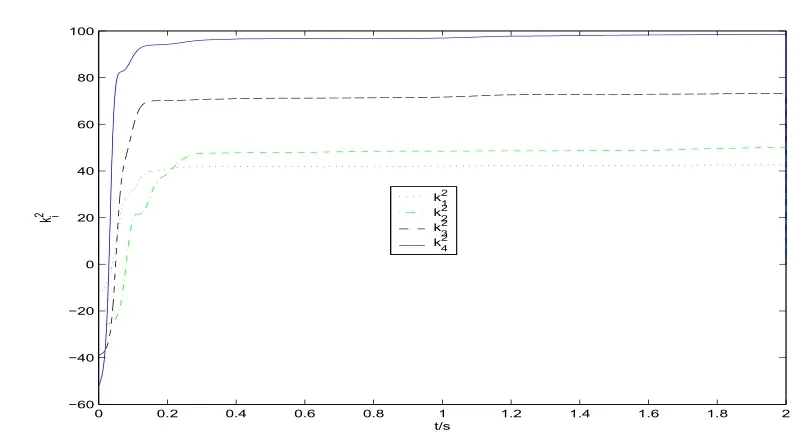
图4: 子网G2 的反馈增益运动轨迹
在驱动网络和响应网络达到同步的同时, 随着时间的增大, 网络(2.3) 的控制器的反馈增益也很快稳定在有界的值, 如图3 和图4 所示.而且, 此时, 驱动网络(2.1) 的拓扑结构也同时被识别出.图5 和图6 分别表示了响应网络(2.3) 中从子网G1出发和从子网G2出发的连接识别轨迹.与驱动网络(2.1) 相比, 图5 和图6 表明了识别的精度非常高.随着时间的变化,矩阵A和矩阵B的每个元素都很快稳定在矩阵式(4.1) 中的值.
5 结论
随着社会、科技的日益发展与成熟, 我们赖以生存的自然环境、社会环境以及各种人造环境之间的联系变得更加紧密和错综复杂.相互依存网络从复杂网络的角度, 利用网络的拓扑结构信息阐述了这种关系.对相互依存网络的结构的研究, 特别是骨干结构的研究是一个具有重要的理论和实际意义的热点课题.本文研究了有向相互依存网络的骨干结构识别问题.其中该网络中的连接只存在于子网间, 且具有非线性连接, 而在子网间没有连接关系.这种形式的网络代表了实际中的很多网络, 在以往的文献中很少涉及到.基于李亚普诺夫稳定性理论、自适应控制技术和LMI 方法, 本文提出了自适应同步的充分条件.这些条件能够保证驱动网络和响应网络中对应的每个节点的运动轨迹达到一致, 在此基础上, 驱动网络的骨干结构也能被响应网络对应识别出来.而且, 本文的假设和所获得的自适应控制器以及自适应律非常简单, 也便于实际中运行.最后的数值模拟也证明了所提出理论的正确性和有效性.本文的研究成果是目前相互依存网络研究的一个重要的发展和深入, 对于现实生活中存在的相互依存网络(譬如重要的基础设施系统等) 具有一定的理论指导意义.
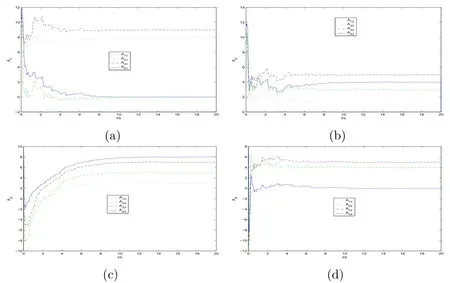
图5: (a) 矩阵的第1 列的识别; (b) 矩阵的第2 列的识别;(c) 矩阵的第3 列的识别; (d) 矩阵的第4 列的识别.
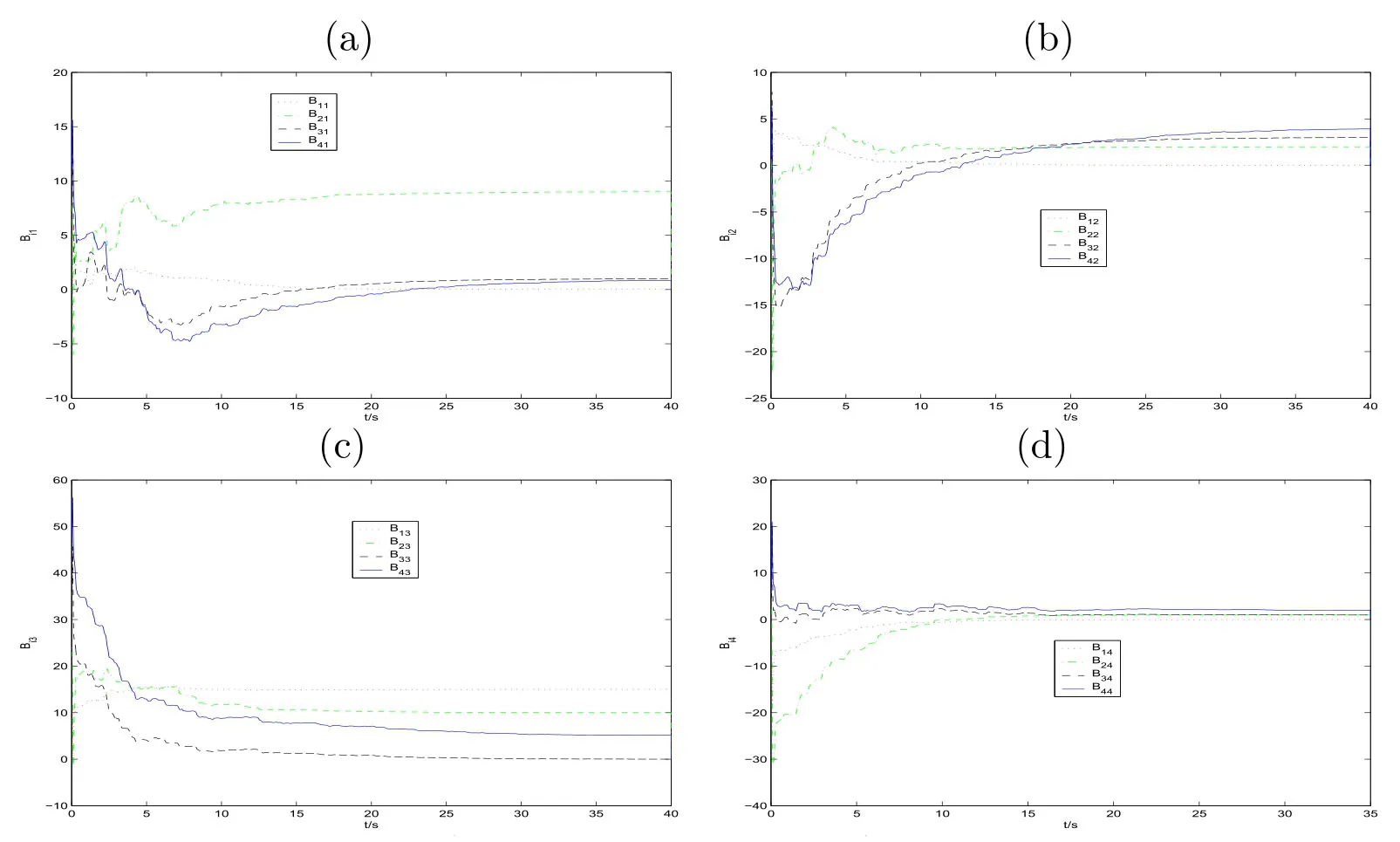
图6: (a) 矩阵的第1 列的识别; (b) 矩阵的第2 列的识别;(c) 矩阵的第3 列的识别; (d) 矩阵的第4 列的识别.
