双齿轮联动樱桃采摘器
2020-02-11李新辉徐洪杨相煜张海南吕叶成杨越
李新辉, 徐洪, 杨相煜, 张海南, 吕叶成, 杨越
(1.浙江师范大学 行知学院,浙江 金华321004;2.金华市技师学院,浙江 金华321004)
0 引 言
樱桃在20世纪初被引入我国,经过多年的发展,已经成为我国水果的重要组成部分,深受国人的喜爱[1]。樱桃的采摘一直是困扰果农的问题,目前在果园中运用广泛樱的桃采摘方式主要有全自动化机械采摘和人工采摘两种[2-3]。
全自动机械采摘主要分为以下2种:1)采摘机器人是利用三维视觉传感器识别定位,控制机械手完成采摘;2)樱桃采摘车是在樱桃树四周围起挡板,利用激震器激烈晃动樱桃树,从而使所有成熟的樱桃都会散落下到挡板中。这类设备适合规模大、地面较平整、果树种植规范的果园。我国南方的果园大部分处于丘陵地带,受地形限制,很难实现全自动化机械采摘。成年的樱桃树较高,人工采摘时需爬树或借助楼梯和高架等设备,存在采摘速度慢、采摘困难和安全隐患多等问题[2,4-6]。
对此,本文提出了一种双齿轮联动樱桃采摘器,它是辅助人工采摘樱桃的小型便携式机械采摘装置,实现人站在地面采摘高处的樱桃,提高采摘效率,消除安全隐患。
1 方案设计
樱桃果不仅比较脆弱,而且若不小心使果柄与果实分离,则容易失水,不利于樱桃的保鲜,会降低果园的经济效益。为使樱桃果柄与果实不会分离,采摘方法如图1所示。采摘者需一只手抓住树枝,另一只手抓住樱桃果柄,向生长的反方向推掐,使果柄与树枝分离,完成采摘。
因此采摘器模仿人工采摘“先夹紧树枝再推掐果柄”的动作,实现采摘的果柄与果实不会分离,采摘器结构示意图如图2所示。
采摘器的采摘工作如图3所示,操作者在采摘时需将采摘头抵在樱桃果柄底部,夹持臂张开在樱桃树枝条两侧。夹持臂先夹紧树枝条,采摘头再往前推出,樱桃果实会掉入到收集网中,模仿人工采摘“先夹紧树枝再推掐果柄”的动作,采摘的果柄与果实不会分离。

图2 采摘器结构图
2 基本原理与主要结构
2.1 手持部分与齿轮齿条部分
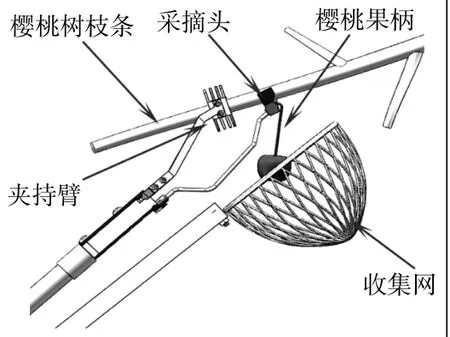
图3 采摘器工作原理
手持部分的基本形状类似于剪刀把手,如图4所示。固定把手与伸缩杆连接,活动把手与固定把手间用铰链连接,活动把手与内部的钢索连接,拉杆与操控箱内的齿条相接。

图1 采摘方法
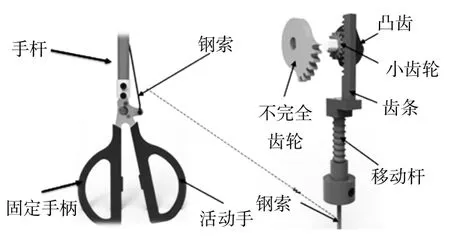
图4 手持部分与齿轮齿条机构示意图

图5 凸轮、不完全齿轮、小齿轮三者联接图
齿条与小齿轮啮合。当活动把手闭合时,会带动钢索松开、拉紧,当钢索拉紧时,拉动与之连接的拉杆,拉杆带动齿条,齿条带动小齿轮转动。
凸轮、不完全齿轮和小齿轮三者之间 通 过“D”字轴联接,联接图如图5所示。小齿轮转动能带动凸轮和不完全齿轮转动。
2.2 采摘头推出和收回动作
操作者先将采摘头抵在樱桃果柄底部,再闭合手持部分的活动把手,小齿轮转动带动不完全齿轮转动,不完全齿轮与齿条框进入啮合状态,齿条框向上运动,带动采摘头向前运动,推向樱桃柄与树枝连接处,将樱桃从树枝上顶下。当完成采摘后,松开活动把手,上述机构在相应的弹簧作用下完成复位。采摘头动作如图6所示。
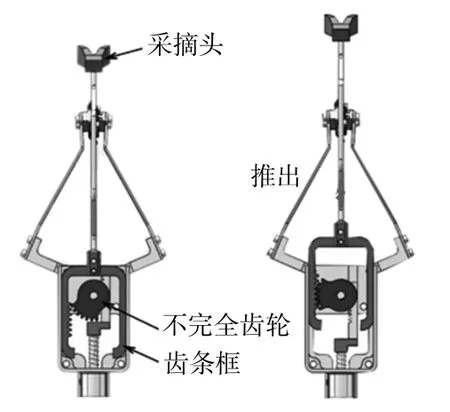
图6 采摘头动作
2.3 夹持臂夹紧与张开动作
操作者将采夹持臂张开在樱桃树枝条两侧,闭合手持部分的活动把手,小齿轮转动带动凸轮转动。凸轮转动带来的曲线变化带动摆杆夹紧,完成对樱桃树枝条的夹持;当凸轮转过一定角度后,进入休止状态,夹持臂保持夹紧状态。松开活动把手,上述机构在相应的弹簧作用下完成复位,凸轮反向转动,夹持臂在回程弹簧作用下会回到张开状态。夹持臂动作如图7所示。
2.4 时序设计
为实现夹持臂要先夹紧树枝条,采摘头再往前推出的动作,进行了如图8所示的时序设计。
初始阶段,夹持臂的摆杆与凸轮接触点在凸轮的基圆上,夹持臂处于张开状态;不完全齿轮与齿条框处于不啮合状态,采摘头处于回收状态。
操作者在采摘时可将此状态的采摘期的采摘头抵在樱桃果柄底部,夹持臂张开在樱桃树枝条两侧。

图7 夹持臂动作

图8 先夹紧再推出动作
初始阶段转向只夹紧阶段:操作者闭合手持部分的活动把手会带动小齿轮转动,进而凸轮和不完全齿轮会同时转动。在凸轮转动角度在45°内,凸轮处于推行程,凸轮推动夹持臂的摆杆,使夹持臂夹紧;而此时,不完全齿轮尚未进入啮合,采摘头不动作,实现了“先夹紧”的动作。
凸轮转动角度在45°时,齿条框与不完全齿轮开始啮合。
只夹紧阶段转向推出阶段:在当凸轮转动角度在45°~90°时,凸轮处于休止状态,夹持臂保持夹紧状态;不完全齿轮与齿条框在进入啮合状态,采摘头推出。
操作者在采摘时需将采摘头抵在樱桃果柄底部,夹持臂张开在樱桃树枝条两侧,闭合手持部分的活动把手,夹持臂会先夹紧树枝条,采摘头再往前推出,樱桃果实会掉入到收集网中,操作者看到樱桃掉在收集网后,松开手持部位的活动把手,在弹簧作用下齿条带动齿轮、凸轮往反方向旋转,机构复位。
2.5 行程放大结构
为了能顺利采摘,对齿条的行程进行了放大。如图9所示,齿轮分度圆的半径为5 mm,而不完全齿轮的分度圆半径为15 mm,齿轮与不完全齿轮是同步转动的,即两者转过的角度相同,这样,使采摘头的移动量放大成了齿条移动量的3倍。
3 样机制作
根据结构设计方案,加工制作了如图10 所示的样机。整个采摘器质量约0.65 kg,尺寸为1200 mm×95 mm×44 mm。样机工作如图11、图12所示。
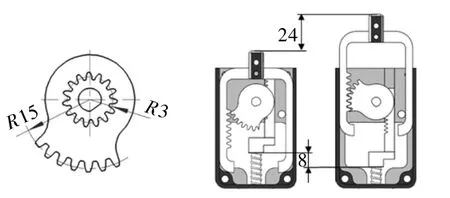
图9 行程放大原理图
在样机的实验过程中,采摘低处的樱桃不使用采摘器更快,但采摘高处的樱桃,操作站在地面就能采摘高处的樱桃,节省了人爬树时间或搬梯子和爬采摘头的时间。同一个人使用采摘器采摘高处樱桃1 kg约使用5 min,爬树采摘约使用8 min,借助梯子采摘约15 min,使用采摘器采摘高处樱桃效率高。

图10 样机实物图

图11 样机夹持头工作图

图12 样机工作图
4 结 论
双齿轮联动樱桃采摘器可以实现对樱桃的高效率采摘,降低樱桃采摘工人的劳动强度和采摘难度,达到省时省力的效果。该装置产品体积小、易操作、质量轻,使用者可以轻松上手进行樱桃的高效率采摘。该产品既可应用于工作量大的采摘基地,也可用于观光农业中果园游客的体验项目。
