一种自适应的四轴飞行器PID控制算法
2020-02-11徐德利
李 威,邱 霞,徐德利
(湖北理工学院 电气与电子信息工程学院,湖北 黄石 435003)
四轴飞行器因具有飞行性能良好、造价低的优点,被广泛应用于地质测绘、无人航拍等领域。四轴飞行器以PID控制算法为主,但PID参数的调节易受环境影响,远不能满足不同行业的差异化需求[1]。例如:在PID参数保持不变的情况下,当挂载重量为100 g时,飞行器飞行稳定;当挂载重量为200 g时,飞行轻微不稳定;当挂载重量为300 g时,飞行极其不稳定。因此,需要重新调整PID参数,以适应不同的载重需求,确保飞行器稳定飞行。
针对以上问题,提出了一种自适应的四轴飞行器单双环并行调节的PID控制算法,具有成本低、实时性强、数据处理率高的优点。
1 四轴飞行器硬件平台的搭建
四轴飞行器实物图如图1所示,主要由机体、电机、集成电路板和遥控器4个部分组成。电机包括4个无刷电机,分别固定于机体的4个角部上,电机输出轴上均安装有螺旋桨叶片,对角的螺旋桨叶片旋转方向一致,相邻的旋转方向不同。集成电路板上的集成飞行控制系统固定在机体上,包括三轴陀螺仪、三轴加速度传感器、数字气压传感器、GPS定位模块、超声波模块、无线模块和电子调速器。遥控器通过无线模块与飞行控制系统实现通信连接。

图1 四轴飞行器实物图
四轴飞行器通过MPU6050传感器获取飞行器的姿态数值[2],由无线接收机获取遥控指令,经主控芯片进行数据处理并输出PWM波控制电机转动实现飞行[3-4]。在飞行过程中通过实时改变4个电机的转速配比,实现四轴飞行器上升、下降、悬停及向前、向后、向左、向右等不同姿态的飞行。
传感器在使用过程中会受到各种因素的干扰,从而导致经PID控制算法处理后的输出数据发生突变,所以传感器的输入数据必须保证平滑。因此,采用限幅滤波与低通滤波相结合的滤波方式来消除干扰。
2 PID控制算法的设计
2.1 PID控制算法简述
PID控制算法的实质是根据输入的偏差值,按照比例、积分、微分的函数关系进行运算,运算结果用以控制输出[5]。PID控制算法公式如下:
Y=P×e(k)+I×∑e(k)+D×[e(k)-e(k-1)]
(1)
式(1)中,e()为目标姿态与实际测量姿态之差;k为PID控制次数;Y为PID输出;P为比例调节参数,对偏差做出即时反应,即偏差一旦产生,调节器立即产生控制作用使被控量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数的大小;I为积分调节参数,只要偏差不为零,输出就会随时间不断变化,以减小偏差,直到消除偏差,不再起控制作用,系统达到稳态;D为微分调节参数,调节偏差变化快慢,变化越快,反对作用越强,微分作用有助于减小超调,抑制振荡,让系统趋于稳定。
2.2 PID控制算法参数的设计
四轴飞行器的控制算法采用单环PID控制算法与双环PID控制算法2种方案。
2.2.1单环PID控制算法
只对四轴飞行器进行角度测量,构建单环PID控制算法,其输入为X,Y,Z三轴的角度,输出为控制4个电机转速的4路PWM波。单环PID控制示意图如图2所示。其中,θ(x,y,z)为期望角度;θ(x,y,z)measure为测量角度;y为输出4路PWM波;e(k)为第k次期望角度与测量角度之差。PID控制调节理想波形如图3所示。
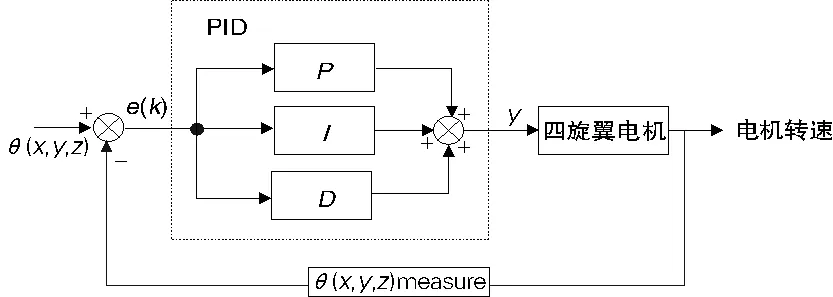
图2 单环PID控制示意图
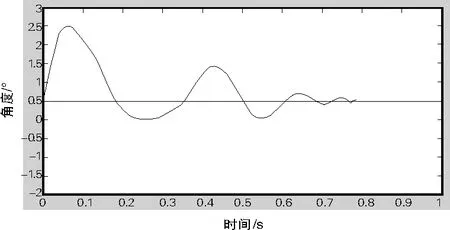
图3 PID控制调节理想波形图
通过将反馈回来的姿态角度与姿态期望角度进行对比,以修正四轴飞行器的飞行姿态期望角度,实现平稳飞行。通过调节PID控制参数,进行飞行测试并记录实验数据。单环PID控制算法的参数较优值与飞行效果见表1。
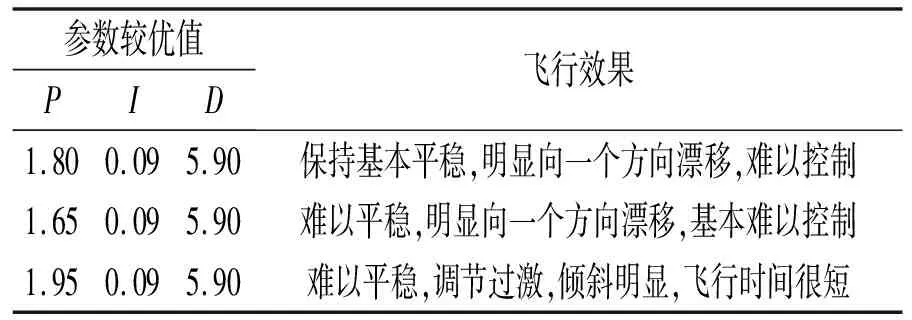
表1 单环PID控制算法的参数较优值与飞行效果
由表1可知,采用单环PID控制算法在对四轴飞行器进行飞行姿态调节时存在2个问题。
1)即使采用最优PID参数,其实际飞行效果仍然不佳。
2)飞行器飞行效果对PID参数极为敏感,仅参数P值波动±8.3%时,飞行效果就相差极大。
2.2.2双环PID控制算法
双环PID控制示意图如图4所示,分为角度PD环和角速度PID环。角度PD环的输出作为角速度PID环的期望输入[6]。其中,θ0(k)为三轴期望角度;θ(k)为三轴反馈角度;ω0(k)为三轴期望角速度;ω(k)为三轴反馈角速度;k为PID调节次数;输出为4路PWM波。实际测试的双环PID控制算法的参数较优值范围见表2。
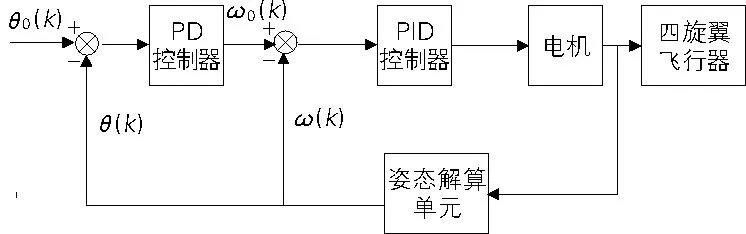
图4 双环PID控制示意图

表2 双环PID控制算法的参数较优值范围
注:表中百分比范围是相对于上述飞行效果最优时对应环的PID参数而言,且每次仅改变1个参数,其他参数仍为最优值。
采用双环PID控制算法时,四轴飞行器在飞行过程中十分平稳,即使没有进行定高飞行,飞行器依旧能悬停空中。在前、后、左、右控制过程中,飞行器反应灵敏,同时在停止方向控制后经过较短时间,飞行器也会悬停。
2.2.32种控制算法的对比分析
从飞行效果上看,方案1(单环PID控制)的预期飞行效果是在发生姿态偏离正常稳定飞行状态时,飞行器能够快速进行姿态修正,保持平稳的飞行状态。但实际情况是即使在最优PID参数下,其飞行姿态也只能勉强朝一个方向倾斜,无法保持平稳的飞行状态。而方案2(双环PID控制)不仅做到了平稳起降、易于控制,且在空气气流稳定时能够实现空中悬停,飞行效果远优于方案1。
从参数较优值范围上看,在方案1中仅参数P值变化了±8.3%时,飞行器就已经无法正常飞行,而方案2中最小的参数变化范围为±13.7%,此时飞行器仍能平稳飞行,方案2的参数较优值范围远大于方案1。
通过对比分析可以发现,单环PID控制算法的参数调节不够迅速,只有当飞行器倾斜到一定角度时,飞行器才能作出反应;当飞行器倾斜角度较小时,调节无力,倾斜角度较大时反应过激,飞行不稳。而双环PID控制算法以角度调节作为外环,角速度调节作为内环,外环的角度输出作为内环角速度的期望输入。例如:当飞行器朝X轴正方向倾斜,经过角度环PD控制器调节,其输出的角速度期望为X轴负方向,使已经朝X轴正方向倾斜的飞行器具有X轴负方向的角速度,以解决飞行器飞行状态调节不够迅速的问题,确保飞行器能稳定飞行。
2.3 PID控制算法结构的设计与优化
控制算法的控制效果是由算法结构决定的,并非由单纯的PID参数决定,因此控制算法设计的核心是算法结构的设计。
算法结构的调整可以解决同一算法体系的适用性问题。要实现飞行器在挂载不同重物时依旧能稳定飞行的目标,可以通过优化算法结构完成。
2.3.1实验验证
选择风洞作为实验对象,进行验证性实验。自制简易风洞结构[7]由超声波测距传感器、透明圆筒、乒乓球、连接部和风机5个部分组成。风洞结构示意图如图5所示。
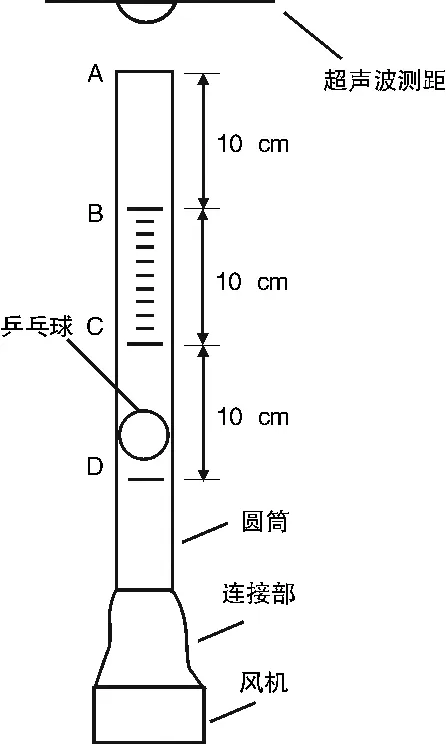
图5 风洞结构示意图
通过超声波测距实时反馈数据,单片机发出PWM波控制电机转速来实现小球悬停在指定高度。在实验过程中将乒乓球的悬停高度类比于飞行器的不同载重,PID参数的取值范围类比于系统对不同环境的适应能力,对同一硬件系统设计2种控制算法进行测试。
控制算法1:采用普通单环PID控制算法结构控制乒乓球悬停在圆筒中指定的位置高度。普通单环PID控制算法见公式(1)。
控制算法2:提出1种改进型的单双环PID控制算法,控制乒乓球悬停在圆筒中指定的位置高度。改进型单双环PID控制算法见公式(2)。
(2)
在式(2)中,比例调节和积分调节的调节强度均随期望误差e(k)的变化而变化,有利于减小调节波动,突出比例调节和积分调节各自的特点,其中比例调节有利于使控制指标快速达到期望值附近,但不利于最大程度上消除期望误差e(k);积分调节有利于最大程度上消除期望误差e(k),但不能使控制指标快速达到期望值,且在期望误差e(k)较大时,极易过调。
2种PID控制算法的调节波形图如图6所示。由图6可以发现,在最优参数条件下,改进型单双环PID控制算法相比于普通单环PID控制算法而言,调节时间更短,波动更小,由此再次验证了算法结构对控制效果的影响显著。改变目标高度,再次进行实验。目标高度改变时,2种PID控制算法调节情况见表3。
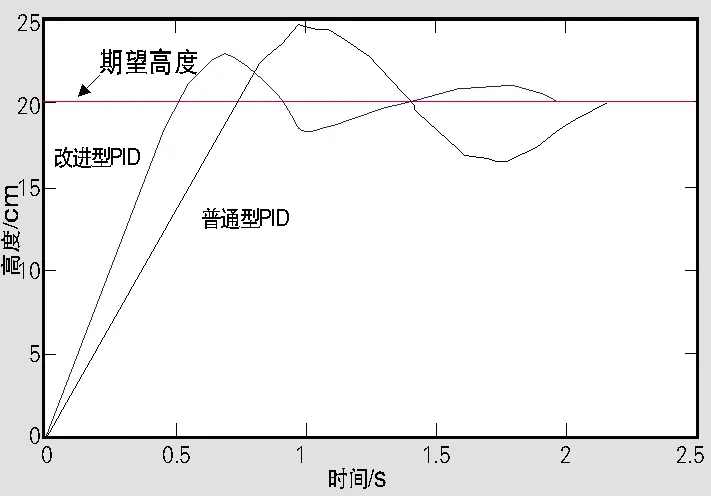
图6 2种PID控制算法的调节波形图
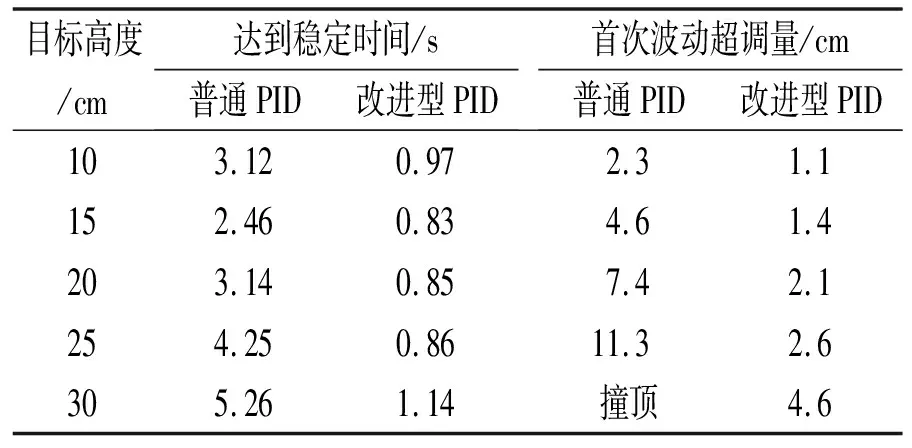
表3 目标高度改变时2种PID控制算法调节情况
注:实验数据均为多次测量取平均值。
根据表3中数据,可以得出以下结论。
1)改进型单双环PID控制算法调节过渡时间少于普通单环PID控制算法。
2)随目标高度变化,PID调节的过渡时间均有所变化,但改进型单双环PID控制算法的调节过渡时间及波动超调量均小于普通单环PID控制算法。
3)在小球高度最低和最高时,调节过渡时间明显大于中间位置,且在中间位置高度较低时,调节过渡时间最短。
取目标高度为20 cm,在保证调节过渡时间不超过4 s的前提下不断地改变PID参数进行实验,2种PID控制算法的参数较优值范围见表4。
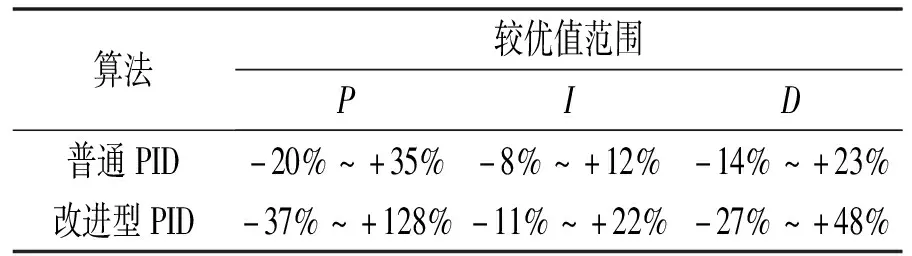
表4 2种PID控制算法的参数较优值范围
注:表中百分比范围是相对于上述飞行效果最优时对应环的PID参数而言,且每次仅改变1个参数,其他参数仍为最优值。
由表4中的数据可以发现,改进型单双环PID控制算法的参数较优值范围比普通单环PID控制算法的要大。这说明在不同的环境中,改进型单双环PID控制算法的适应性更强。
2.3.2结构优化
针对四轴飞行器的飞行特点,设计一种单双环并行调节的PID控制算法。该控制算法在飞行器的X,Y轴采用双环PID控制算法,Z轴采用单环PID调节。同时,将式(2)中的改进型单双环PID控制算法用于四轴飞行器X,Y轴的内环调节中,其外环为PD结构不变。单双环并行调节的PID控制算法的参数较优值范围见表5。在参数较优值范围内,飞行器飞行十分平稳,在前、后、左、右控制过程中,飞行器反应灵敏。
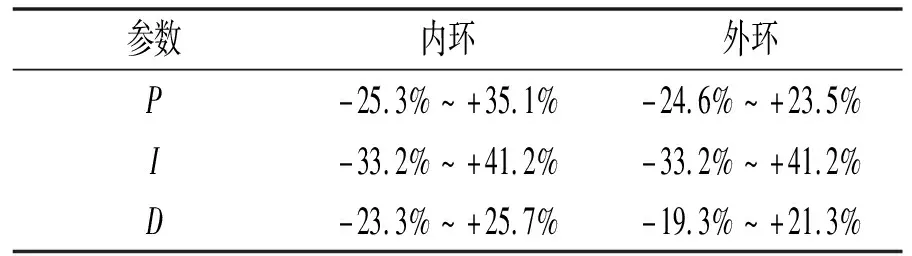
表5 单双环并行调节的PID控制算法的参数较优值范围
注:表中百分比范围是相对于上述飞行效果最优时对应环的PID参数而言,且每次仅改变1个参数,其他参数仍为最优值。
在参数最优值的条件下进行四轴飞行器的载重实验。载重实验结果见表6。
由表6可以看出,当采用单双环并行调节的PID控制算法时,四轴飞行器基本上均能保持稳定飞行,可以适应不同的载重需求。这说明改进PID的算法结构可以大大提高控制效果,增强PID控制的稳定性。
3 结论
提出了一种自适应的四轴飞行器PID控制算法。该算法集各姿态控制器为一体,采用单双环并行调节的PID控制算法,结构简单,所需数据少。与传统的使用MPU6050、电子罗盘等多种模块的四旋翼飞行器相比,该控制系统仅使用MPU6050模块,在保障抗干扰能力和恢复平衡速度相同的情况下,成本更加低廉。同时,该算法使用限幅滤波与低通滤波相结合的滤波方式,提高了数据的实时性和数据处理的效率。