毫米波调频引信的优化二维FFT信号处理算法
2020-02-11郭晨曦郝新红栗苹李国林贾瑞丽
郭晨曦,郝新红,栗苹,李国林,贾瑞丽
(北京理工大学 机电工程与国家控制重点实验室,北京100081)
毫米波调频引信相较于传统微波调频引信而言,具有体积小、功耗低、质量轻、频带宽且分辨率高、抗干扰能力强等优点,且与激光、红外引信相比具有全天候作战的能力,在各国都备受重视[1]。
毫米波调频引信的差频信号包含了目标的距离和速度信息,目前主要有连续测距[2-3]、谐波定距[4-5]以及多普勒包络提取[6]3类方法。连续测距类的方法主要集中在瞬时频率估计算法研究,但是算法实时性往往无法满足实际工程需求,工程实现有一定的难度;谐波定距与多普勒包络提取方法需要对差频信号进行二次混频与滤波处理,二次混频的参考信号频率与调制频率必须是严格的倍数关系,对数字芯片中的直接数字频率合成器(Direct Digital Synthesizer,DDS)要求较高,而且滤波器的设计往往占用较多的系统资源,其性能的优劣将影响目标信息的提取效果。
通过分析调频引信的差频信号可以得到,差频信号含有高次谐波分量且其各次谐波频率、幅度均受到多普勒信号的调制,且还有噪声等干扰[7]。当引信工作在毫米波段时,目标尺寸大于引信工作波长,此时调频引信产生的差频信号可近似看作目标多个散射点回波差频信号的叠加,频谱分量增多,距离信息的提取更加复杂[8-11];实际作战环境中,干扰机与引信为非合作目标,无法准确测量弹目相对运动速度信息,因而速度信息的提取有助于提高引信抗干扰性能。
针对毫米波调频引信差频信号中的距离速度信息联合估计的问题,本文提出一种基于相对距离评价函数优化的二维快速傅里叶变换(Fast Fourier Transform,FFT)信号处理算法。首先通过分析二维FFT算法实际测距测速精度与FFT点数的关系,将选取合适点数提高精度问题等效优化问题,采用相对距离评价函数优化方法进行求解,得到FFT点数的最优解;然后对差频信号进行采样,将采样得到的数据整理为二维数据矩阵形式,利用优化后的二维FFT算法对数据矩阵进行分析计算,最终提取相应的距离和速度信息;最后验证了本文提出的算法能够同时提高实际测距测速精度,而且优化后算法的实时性满足毫米波调频引信的工程需求。
1 毫米波调频引信差频信号模型
毫米波调频引信的原理框图如图1所示。
假设引信采用三角波调制信号,此时发射信号、回波信号以及差频信号的时频特性如图2所示。图中为目标回波产生的时延,R为弹目距离,v为径向相对速度,f为频率,t为时间,fc为载频,Fm为单边频偏,Tm为调制周期,fb,down为下扫频段对应的差频频率,fb,up为上扫频段对应的差频频率,c为光速。
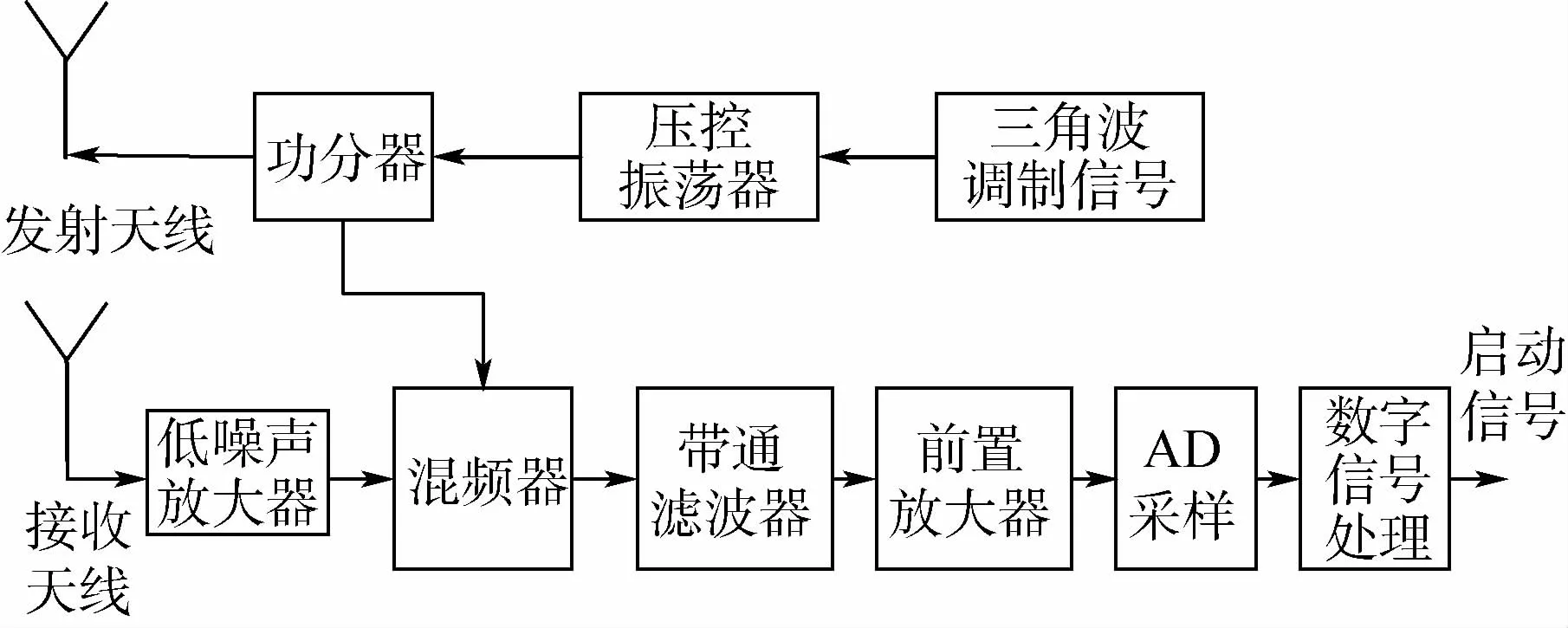
图1 毫米波调频引信原理框图Fig.1 Block diagram of principle of millimeter-wave frequency modulated fuze
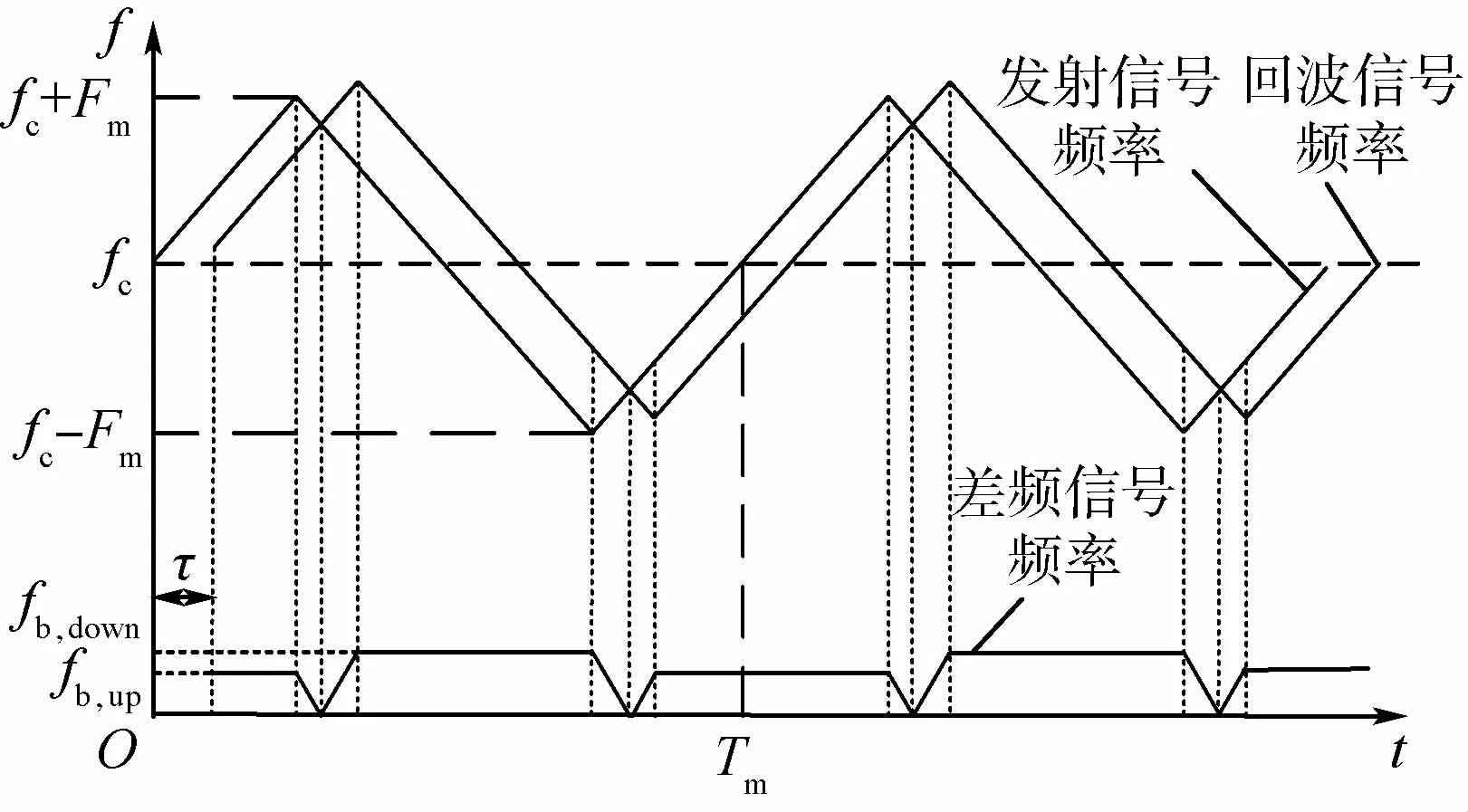
图2 发射信号、回波信号及差频信号时频特性Fig.2 Time-frequency characteristics of emission signal,echo signal and beat signal
差频信号表达式为
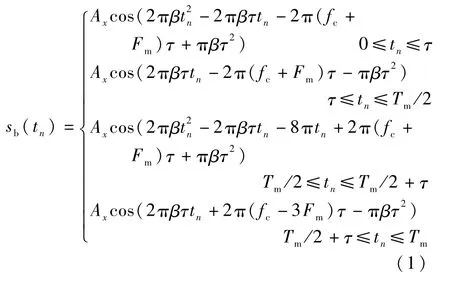
式中:Ax为差频信号幅度为调制斜率;tn为观测时刻。
由式(1)可知,一个周期内差频信号由2个单频信号和2个调频信号组成,针对式(1)做傅里叶变换,可得一个调制周期内差频信号频谱为[12]

式中:k(m,τ)表示2个单频信号的傅里叶系数;a(m,τ)表示2个调频信号的傅里叶系数;m为谐波次数;fm为调制频率;fd为多普勒频率。在引信应用中,由于每个周期内2个调频信号的持续时间很短(τ≪T),它们产生的频谱成分对后续信号处理的贡献可忽略不计,因此,毫米波调频引信的差频频谱主要考虑2个单频信号的频谱成分。k(m,τ)的表达式为k(m,τ)=
式中:fc为电磁波载频。
由式(3)可知,m次谐波出现峰值时满足
2 基于相对距离评价函数优化的二维FFT算法
2.1 二维FFT算法原理
二维FFT是一维FFT在二维的推广形式,现广泛用于图像领域的处理,处理的数据为像素矩阵[13],其表达式为

式中:f(x,y)表示要处理的二维数据矩阵,矩阵维度为J×K,x=0,1,…,J-1,y=0,1…,K-1;F(u,v)表示二维FFT的结果。
从式(4)中可以看出,它可以分解为2个一维FFT,即

设

则

基于二维FFT算法的距离速度信息提取方法原理示意图如图3所示。图3中:Amp为幅度,N为距离维FFT点数。
差频信号首先经ADC采样,采样频率为fs,将采样后的离散信号做一次N点FFT,得到N×1的频谱向量;积累M次N点FFT后,得到M×N的二维频谱矩阵,再对二维矩阵按列做M点FFT,此时的采样频率为经过二维FFT处理后,通过峰值点检测找到相应的频率测量值和多普勒频率测量值,则目标的距离与速度为
式中:λ为电磁波波长。由于所采用的三角波调制信号分上下扫频周期,因此当找到时,应当读取相应的采样点数Nm,计算此时的采样时刻,则式(8)取“+”号;如果则式(8)取“-”号。
图3 二维FFT算法提取信息方法原理示意图Fig.3 Schematic diagram of two-dimensional FFT algorithm principle for extracting information
2.2 测距精度
由差频信号的频谱可知,出现峰值处的m次谐波对应的主瓣宽度为理论测距精度为与调制频偏成反比,如图4所示。
由图4可知,理论测距精度随着调制频偏的增大而提高。然而对于调频引信而言,由于体积和成本的限制,通过增大调制频偏来提高理论测距精度的方法在工程上难以实现,因此当调制频偏一定时,引信的理论测距精度为固定值,与其他因素无关。
实际测量中,测距精度与距离维FFT算法中的频率分辨率有关,即频率分辨率当时,多普勒频率对测距精度影响可以忽略,此时实际测距精度Tm=10μs,则实际测距精度与距离维FFT点数N关系如图5所示。
图4 理论测距精度与调制频偏的关系Fig.4 Relationship between theoretical ranging accuracy and modulation frequency offset
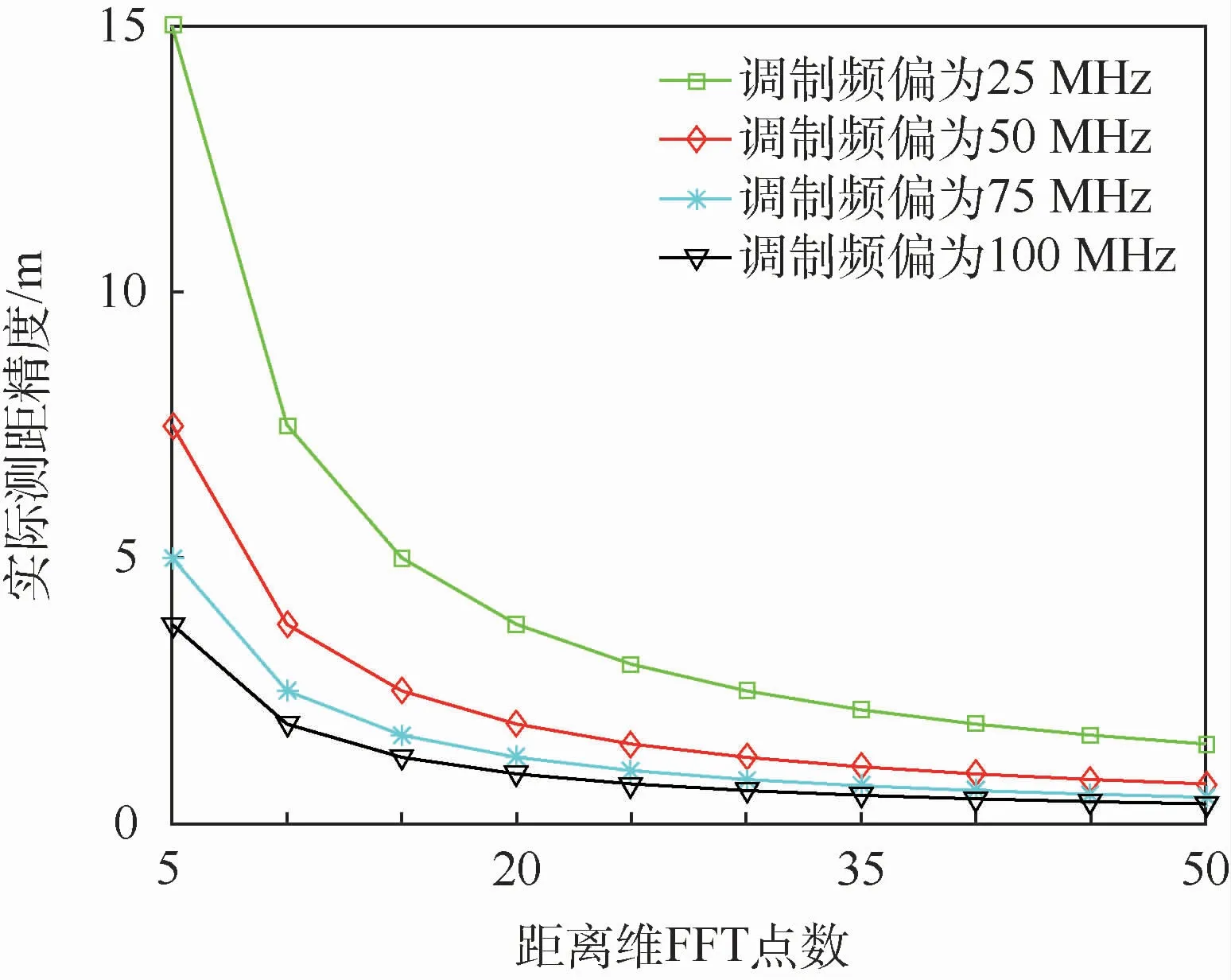
图5 实际测距精度与距离维FFT点数的关系Fig.5 Relationship between practical ranging accuracy and distance-dimensional FFT point number
从图5中可看出,当调制频偏一定时,实际测距精度与距离维FFT点数成反比,当FFT点数较少时,实际测距精度较低;随着FFT点数增加,实际测距精度提高,但是当FFT点数继续增加时,实际测距精度变化不大,这是因为当FFT点数无限增加时,实际测距精度ΔR逐渐逼近理论测距精度ΔRT,而ΔRT与FFT点数无关,只与调制频偏有关,因此选取合适的距离维FFT点数N对提高实际测距精度十分重要。
2.3 测速精度
由三角波线性调频信号的模糊函数可知,信号的多普勒分辨力为则理论测速精度ΔvT=其中L为采样时长内调制周期的个数,如图6所示,可以看出,随着调制周期数L越大,理论测速精度越高。
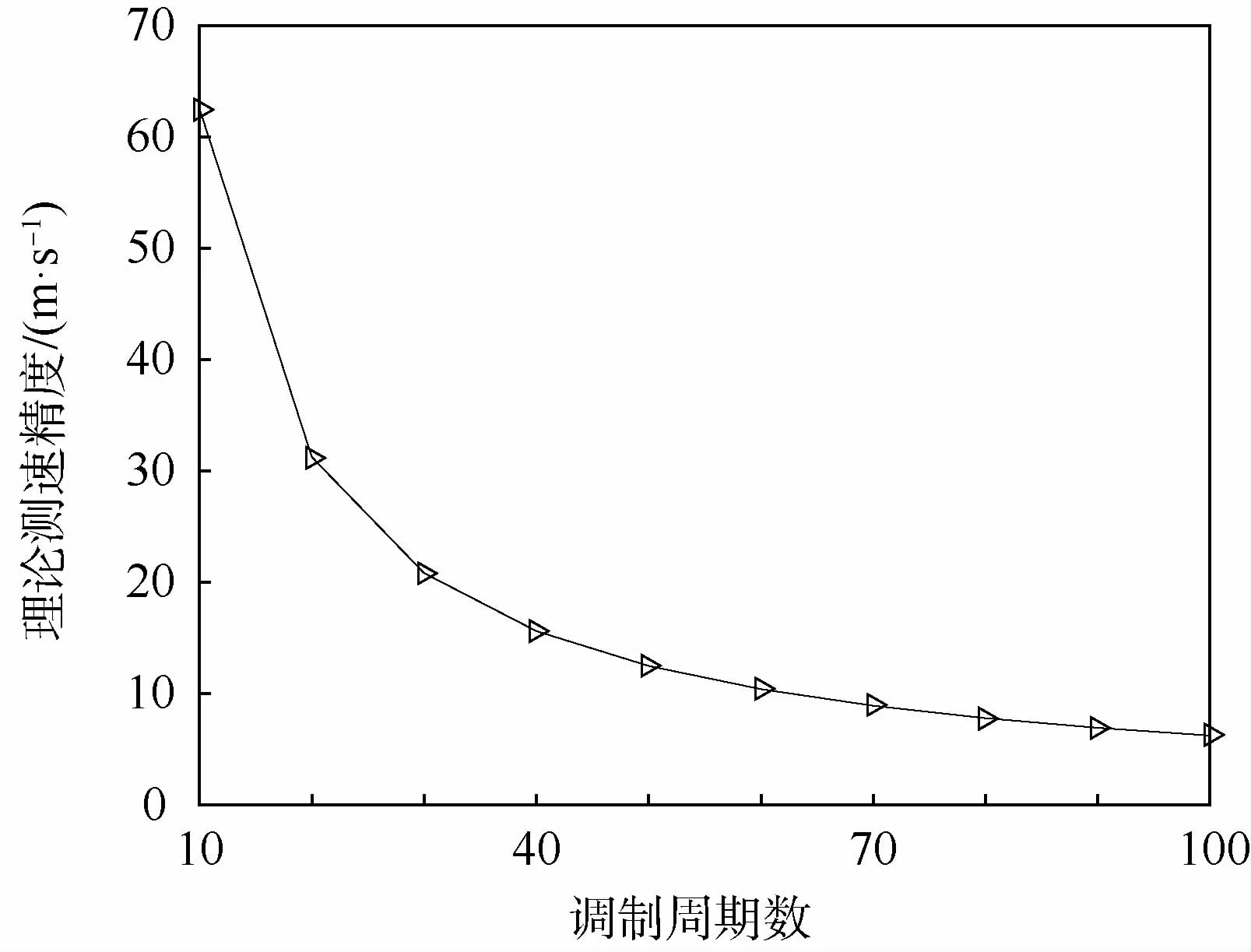
图6 理论测速精度与调制周期数的关系Fig.6 Relationship between theoretical velocity measurement accuracy and number of modulation periods
实际测量中,由二维FFT算法对速度的提取主要是二维矩阵中的列向量FFT变换,这一过程可看作以为采样频率,对距离维FFT的结果进行采样,然后做M点FFT,根据奈奎斯特采样定理,为保证准确提取速度信息,此时的频率分辨率实际测速精度为假设λ=0.012 5m,fs=5MHz,目标径向相对运动速度v=300m/s,则实际测速精度与距离维FFT点数N、速度维FFT点数M的关系分别如图7、图8所示。
由图7和图8可以看出,实际测速精度与距离维FFT点数N、速度维FFT点数M均成反比关系,当某一维点数一定时,随着另一维点数的增加,实际测速精度逐渐提高,但是当点数继续增加时,实际测速精度变化不大,且过多的点数会增加二维矩阵的维度,直接影响数据的存储空间和计算量。实际测速精度与N、M的联合关系如图9所示。
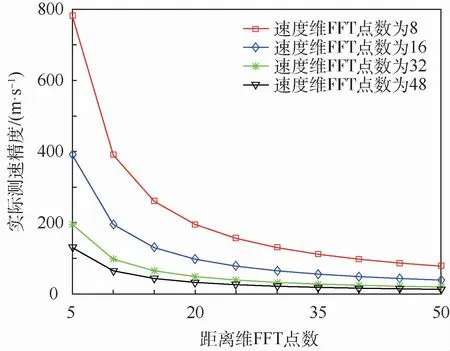
图7 实际测速精度与距离维FFT点数的关系Fig.7 Relationship between practical velocity measurement accuracy and distance-dimensional FFT point number
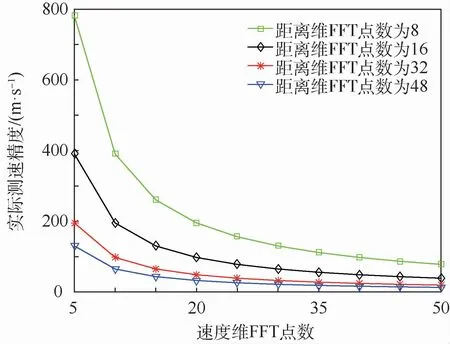
图8 实际测速精度与速度维FFT点数的关系Fig.8 Relationship between practical velocity measurement accuracy and velocity-dimensional FFT point number
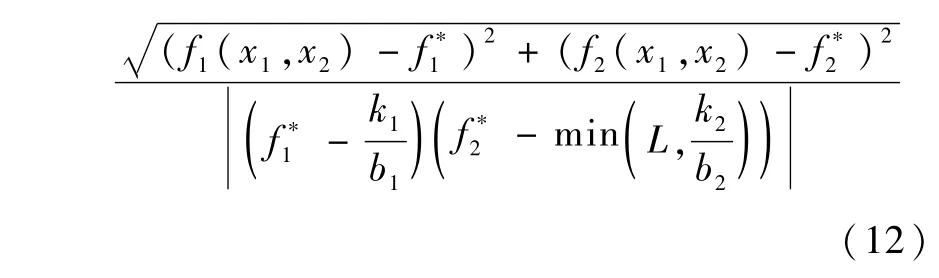
由上述分析可知,对差频信号进行二维FFT处理时,距离维FFT点数N与速度维FFT点数M的选择直接影响实际测距精度ΔR与实际测速精度Δv,如何选取N、M使得ΔR、Δv同时达到最优成为算法实现的关键问题。由ΔR、Δv表达式可知,定义则,由于k1、k2与x1、x2无关,因此优化问题中的目标函数可定义为f1(x1,x2)=考虑如下的优化问题:
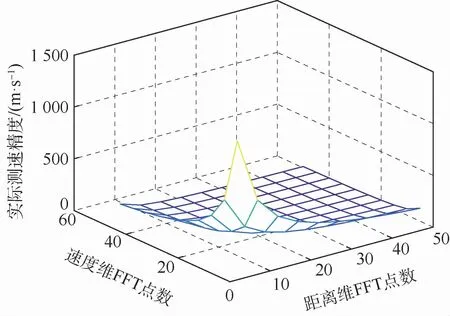
图9 实际测速精度与距离维和速度维FFT点数的联合关系Fig.9 Joint relationship between practical velocity measurement accuracy and distance-dimensional and velocity-dimensional FFT point number
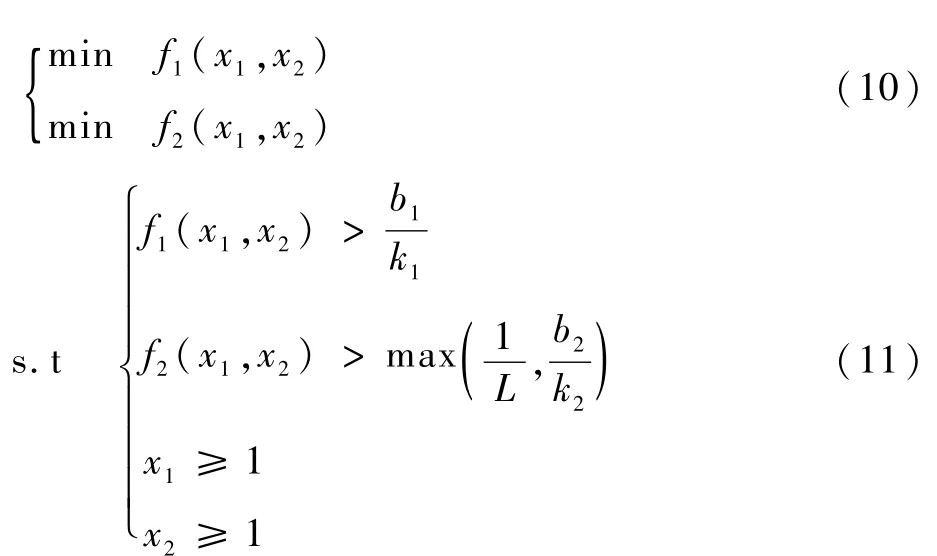
2.4 基于相对距离评价函数的优化算法
针对2.3节的优化问题,本文提出一种基于相对距离评价函数的优化算法。首先判断约束条件(11)中的大小,然后选择两者中的最大值作为第2个目标函数的约束条件;其次在约束条件下求解2个单目标优化问题,即minfi(x1,x2),i=1,2,得到2个值域最优解则为整个优化问题值域中的一个理想点,一般很难达到,于是可以构造一个基于相对距离的评价函数来寻找距离f*最近的f作为近似值,评价函数为φ(f(x1,x2))=
然后在约束条件下求φ(f(x1,x2))的极小值,即

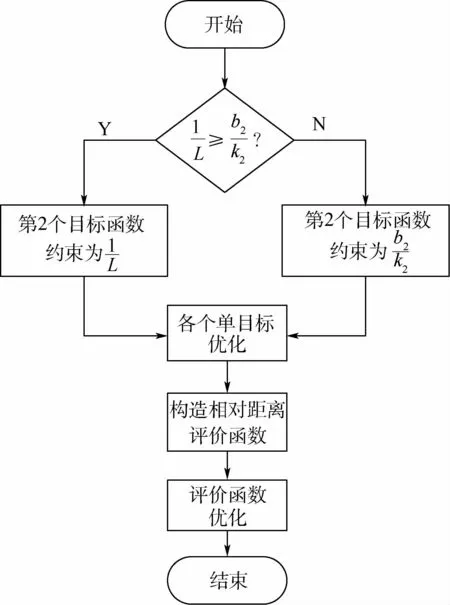
图10 基于相对距离评价函数的优化算法流程图Fig.10 Flowchart of optimization algorithm based on relative distance evaluation function
3 仿真与讨论
3.1 优化算法的仿真讨论
为验证基于相对距离评价函数的优化算法在优化求解二维FFT点数、提高二维FFT测距测速精度方面的可行性,本文进行了蒙特卡罗实验,实验次数K′=100,以实验结果的均方根误差(RMSE)作为评价算法的性能,表达式为
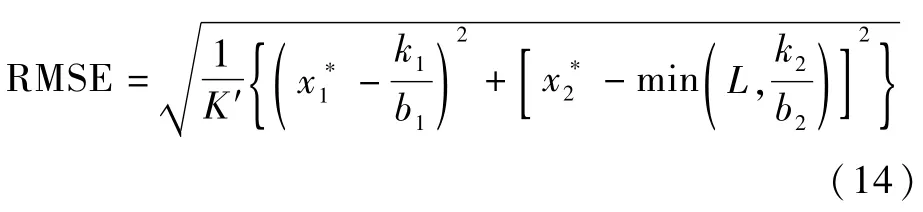
具体参数为:工作载频fc=24 GHz,相应的波长λ=0.012 5m,三角波调制周期Tm=10μs,调制频偏Fm=±100MHz,径向相对运动速度为v=300m/s,理论测距精度调制周期数,理论测速精度为b2=ADC采样频率fs=5MHz,系数从图11中可以看出,本文算法在给定参数条件下得到一个最优解,考虑到实际二维FFT点数均为正整数,最优解为N=49,M=123,其对应的实际测距精度为实际测速精度为
图12比较了传统理想点法[14]与本文算法之间的优化性能,可以看出,随着采样时长内调制周期数L的增加,本文算法优化性能更好,RMSE值更接近于0,即通过最优解求出的实际测距测速精度更接近理论值。
差频信号经过每一次N点FFT处理,信噪比的增益为10 lgN(单位:dB),因此二维FFT处理对差频信号产生的信噪比增益为10 lg(MN)(单位:dB),关系如图13所示。由图中可看出,随着点数N、M的增加,信噪比增益逐渐增大,二维FFT能有效提高差频信号的信噪比增益。
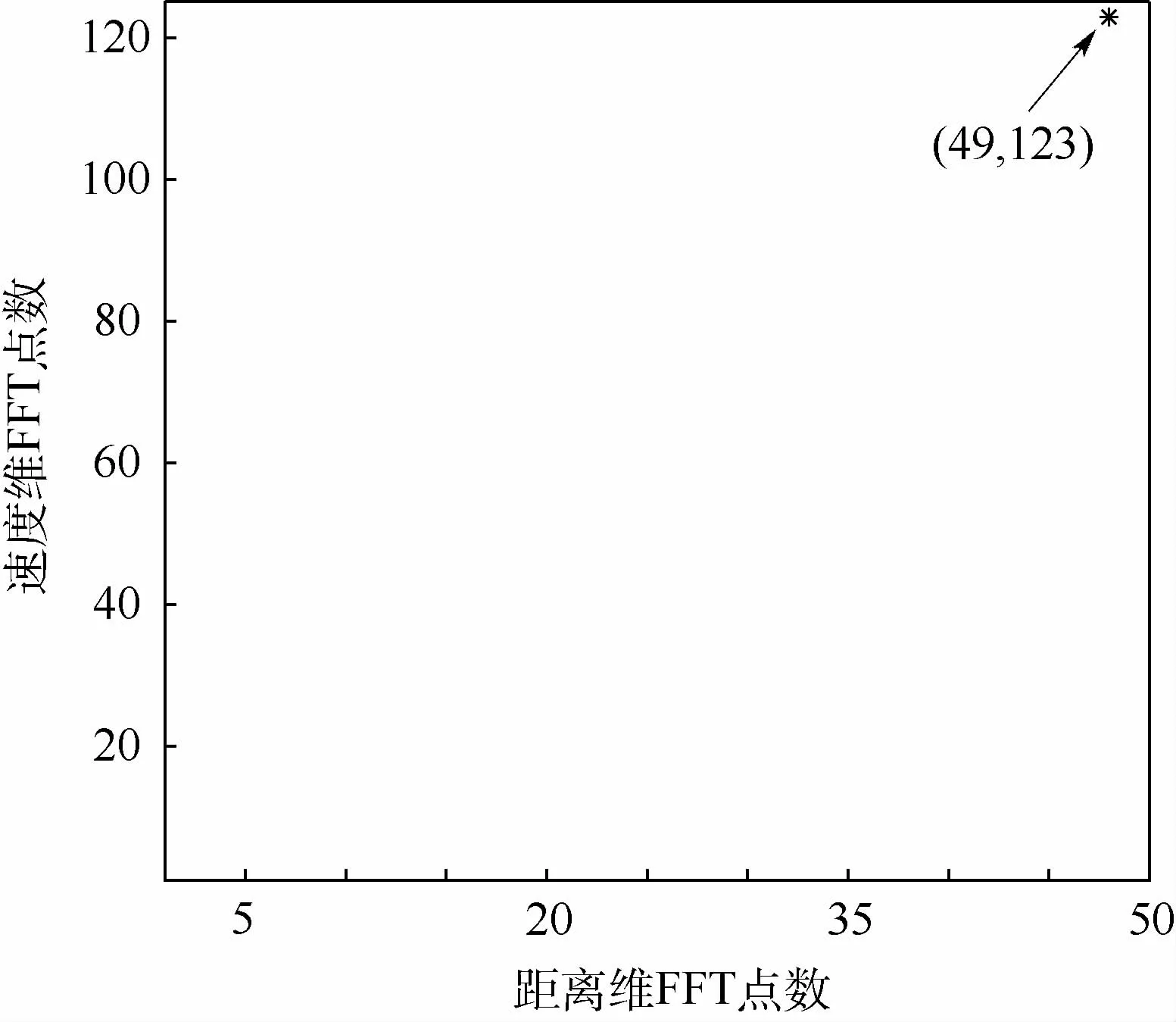
图11 基于相对距离评价函数的最优解Fig.11 Optimal solution based on relative distance evaluation function
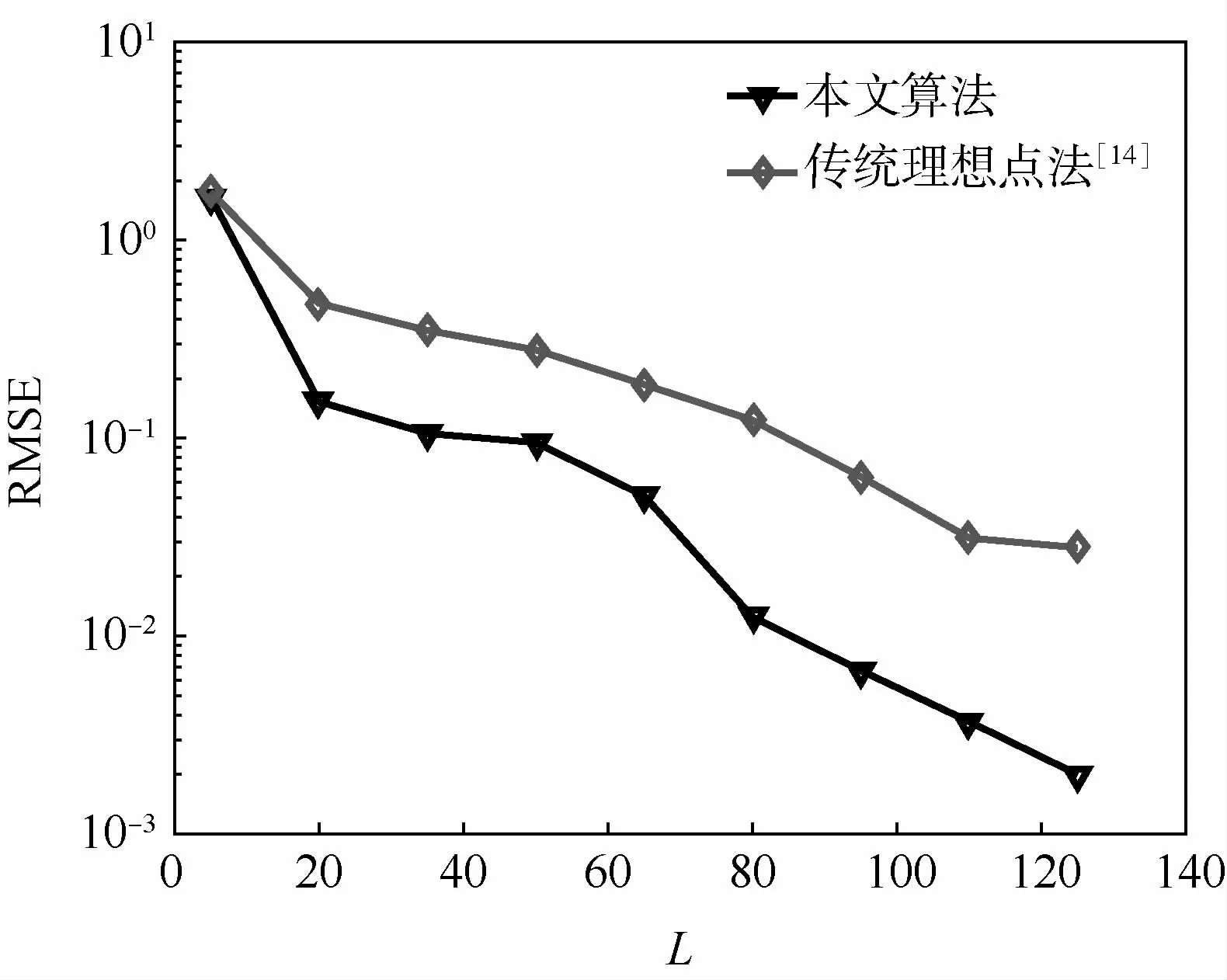
图12 传统理想点法与本文算法的优化性能比较Fig.12 Comparison of optimal performance between traditional ideal point method and proposed algorithm
图13 信噪比增益与距离维和速度维FFT点数的联合关系Fig.13 Joint relationship between signal-to-noise ratio gain and distance-dimensional and velocity-dimensional FFT point number
3.2 优化后二维FFT算法仿真讨论
为验证经过优化处理后二维FFT算法估计毫米波调频引信距离速度信息的正确性与可行性,本文将联合采用MATLAB软件与FPGA硬件平台对调频引信的差频信号进行建模仿真。首先,使用MATLAB中的Simulink建立点目标下毫米波调频引信差频信号模型,如图14所示。
具体参数与3.1节仿真参数一致,经过优化后的距离维FFT点数N=49,速度维FFT点数M=123,实际测距精度实际测速精度为在信噪比为10 dB的输入下,差频信号的时域波形如图15所示。
将Simulink仿真产生的差频信号送入MATLAB工作空间,对其进行二维FFT算法处理,分别得到距离维FFT频谱图、速度维FFT频谱图,如图16、图17所示。
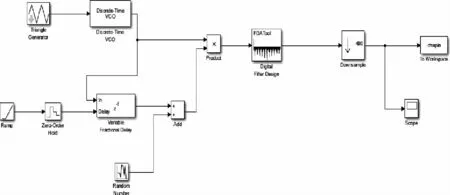
图14 点目标下毫米波调频引信差频信号Simulink模型Fig.14 Simulink model of beat signal of millimeter-wave frequency modulated fuze under condition of point target
图16中的峰值出现在8次谐波位置处(800 kHz),对应的距离为3 m,符合参数设定值;谱线间隔为102 kHz,与最优解N=49对应的距离差频频率分辨率结果一致。
图15 差频信号的时域仿真波形Fig.15 Time domain simulation waveform of beat signal
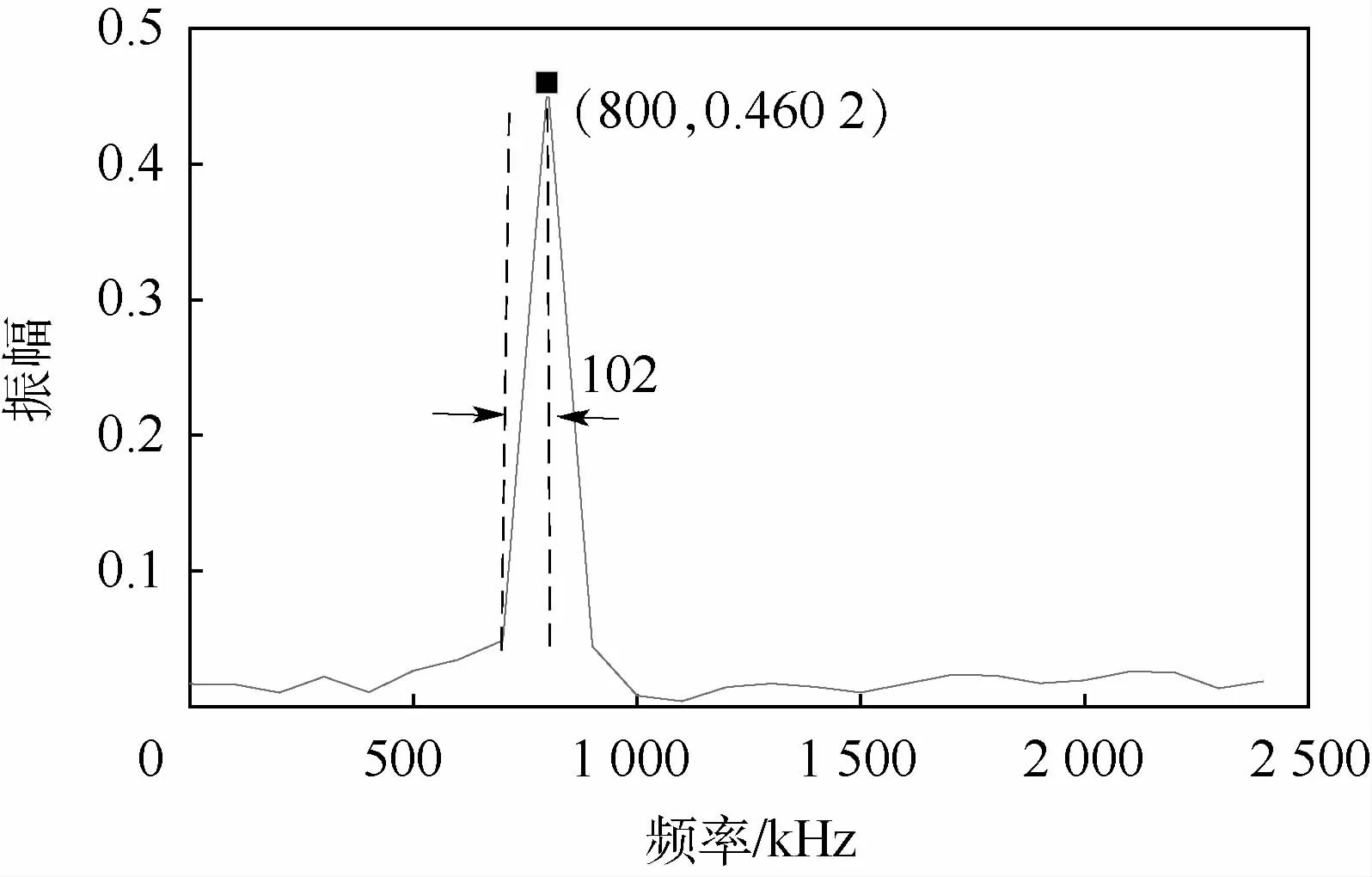
图16 距离维FFT频谱图Fig.16 Range-dimensional FFT spectrogram
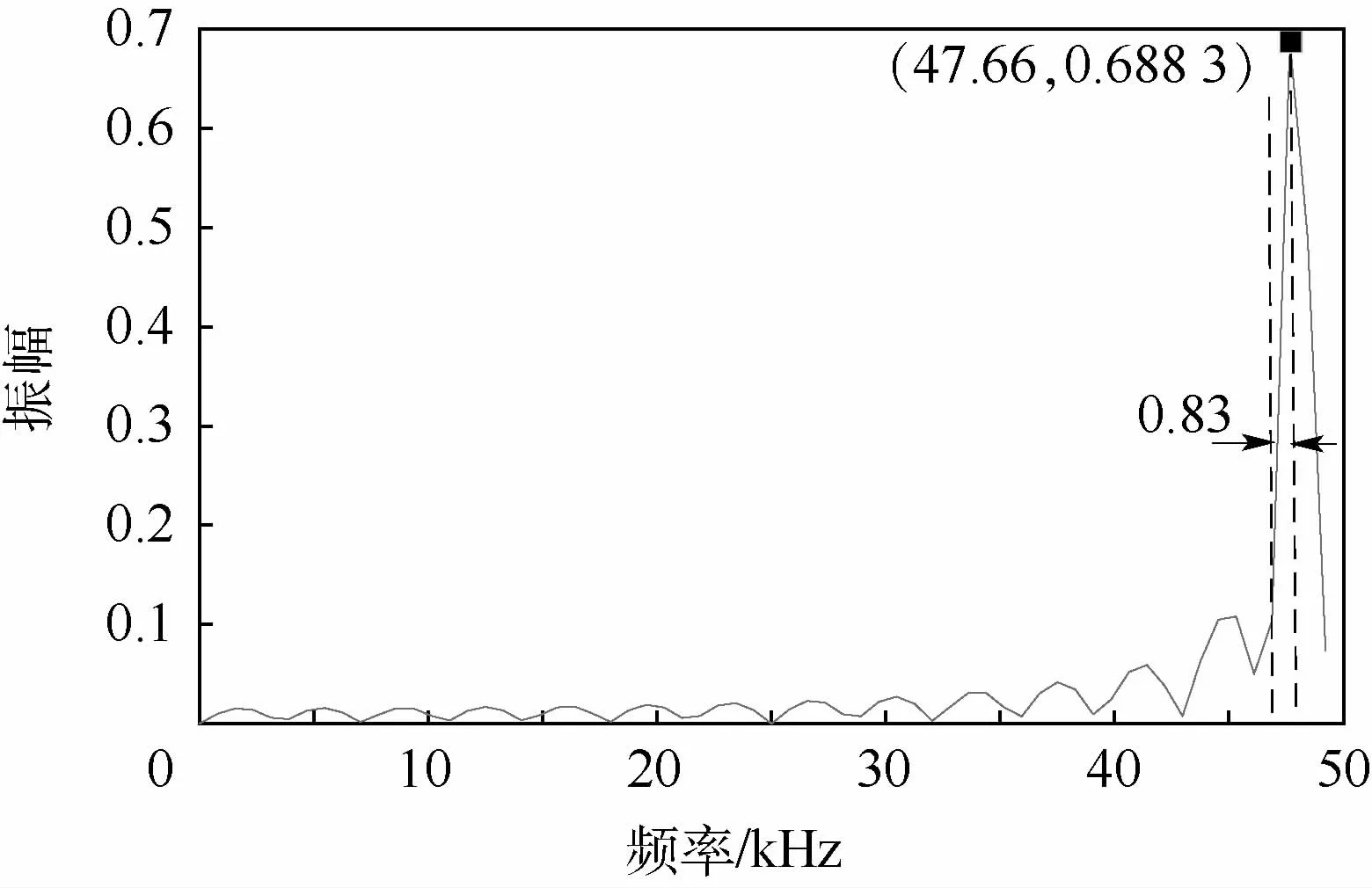
图17 速度维FFT频谱图Fig.17 Velocity-dimensional FFT spectrogram
图17中的峰值出现在位置47.66 kHz处,对应的速度为v=297.8m/s,考虑到实际测速精度为5.18m/s,在误差范围内符合参数设定值;谱线间隔为0.83 kHz,与最优解N=49,M=123对应的多普勒频率分辨率结果一致。
由以上仿真分析可看出,毫米波调频引信的目标距离速度信息可以利用优化后的二维FFT算法直接提取,不用经过二次混频和多普勒滤波即可获得相应信息。
3.3 算法复杂度分析
优化处理算法由于在引信参数设定后可离线处理,因此不占用实时硬件处理资源;优化后的二维FFT算法复杂度主要来自于二维数据的存储与2次FFT的计算[15]。假设二维数据存储位数为16位,计算过程中需要存储M组距离维N点FFT的结果和N组速度维M点FFT的结果,则存储空间的大小为2×16×M×N;距离维FFT的复杂度为O(MNlog2N),速度维FFT的复杂度为O(NMlog2M),总 复 杂 度 为O(MNlog2N+NMlog2M)。
表1从采样点数、算法复杂度、测距精度和测速精度4个方面对比了优化前后二维FFT信号处理算法仿真测试结果。
从表1中可以看出,在距离分辨率和速度分辨率一定的情况下,本文提出的优化二维FFT算法能够减少采样点数,降低算法复杂度,适合硬件实时计算;换言之,相同采样点数的前提下本文算法可以同时提高测距测速精度。
为了进一步验证本文算法的实时性,采用FPGA硬件平台进行检验。本文采用的FPGA芯片为Spartan 6系列中的XC6SLX16,其时钟频率为50MHz[16]。本文采用Verilog HDL硬件描述语言编写二维FFT算法,整个过程中占用的资源量如图18所示,功能仿真后的时序图如图19所示。
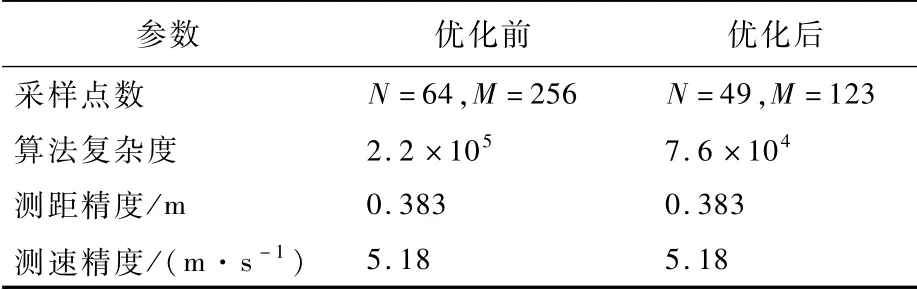
表1 优化前后仿真测试结果对比Table 1 Comparison of simulation test results before and after optimization
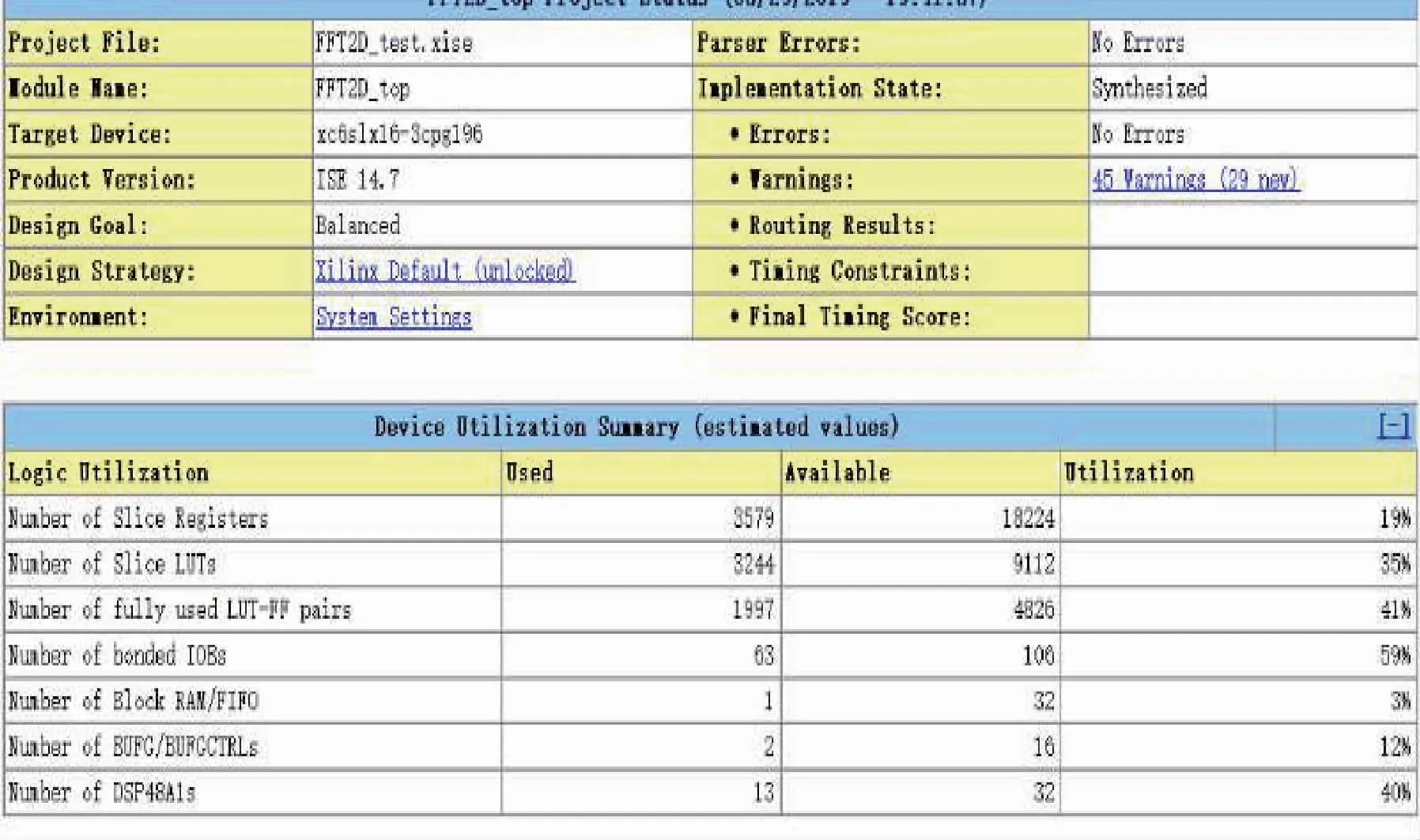
图18 算法实现所用FPGA资源Fig.18 FPGA resource used for algorithm implementation
由图18可以看出,本次计算使用了13个DSP48A1s单元,其中每个单元包含一个乘法器,一个加法器和一个累加器,占总量的40%;使用了一个Block RAM存储单元,占总存储空间的3%,满足实际需求。
由图19中可以看出,二维FFT算法可以在FPGA芯片上实现,其中距离维FFT频谱峰值处对应的频率值分别为805、903 kHz,速度维FFT频谱峰值处对应的频率值为49 kHz,与MATLAB仿真结果有所差异,这主要是由于数据处理过程中需要对定点数进行截位操作,从而引入一定的误差。且每次计算时长为tatency+MNTclk,其中Tclk为时钟周期,tatency为距离维FFT IP核的延时,其延时与距离维FFT点数关系如表2所示。
由于采用基-2 FFT,因此距离维FFT处理时进行了补零,将49点采样数据补零至64点数据后再做距离维FFT处理,延时latency1=269Tclk。因此二维 FFT 算法执行一次的总时长为162.82μs,对应引信的移动距离约为0.049m,再加上采样引起的距离延迟为则一次二维FFT处理引起的距离延迟为0.049 06 m,与实际测距精度0.383m相比很小,可忽略其对信息提取精度的影响,满足引信实时性需求。
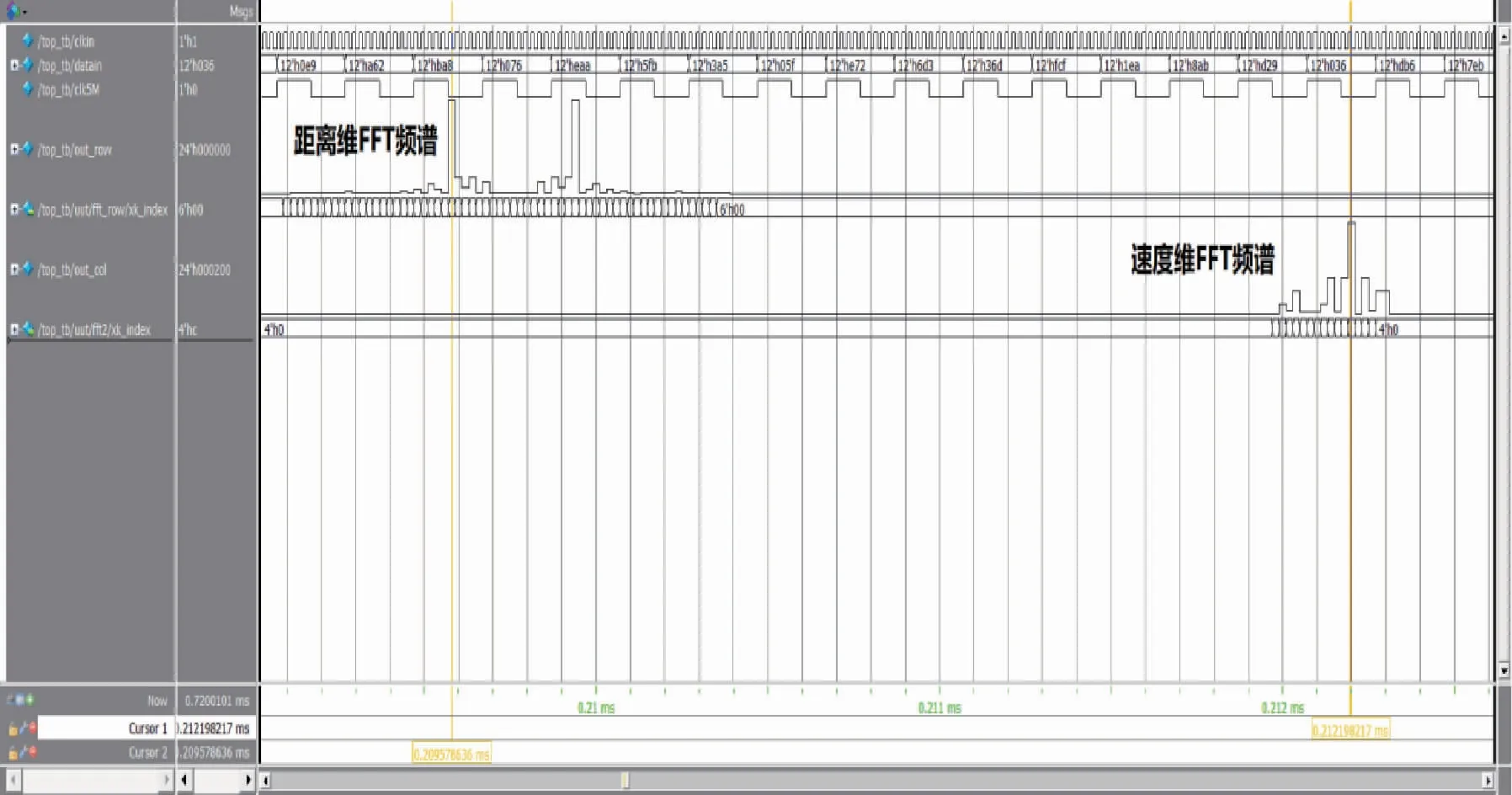
图19 算法功能仿真时序图Fig.19 Sequence chart of algorithm function simulation
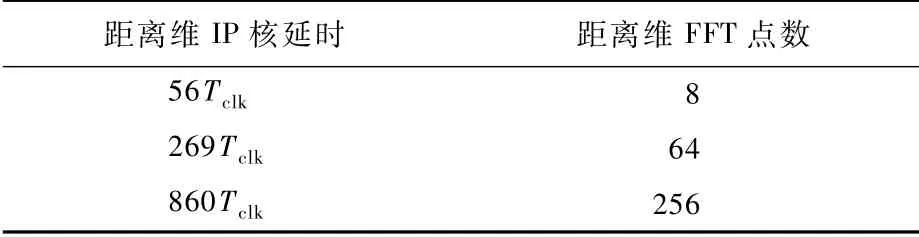
表2 距离维FFT IP核延时与FFT点数的关系Table 2 Relationship between distance-dimensional FFT IP core delay and number of FFT points
4 结 论
1)本文通过理论分析与仿真实验,验证了基于相对距离评价函数优化的二维FFT算法可以用于同时提取毫米波调频引信的距离速度信息,在实际提取过程中,需要考虑测量精度与实时性这2个因素,根据本文算法进行优化,然后再对差频信号进行二维FFT处理,可以在测距精度与测速精度同时达到最优的条件下提取信息。
2)本文算法同时提高了实际测距测速精度,由于采用离线处理,不占用硬件资源,降低了信号处理单元中数字系统处理的复杂度。
3)本文算法的实时性满足实际引信的工程需求,因此选用合适的FPGA芯片和外围配置电路可以实现毫米波调频引信的信号处理要求,能够在复杂的环境下提取目标信息。