基于地面三维激光扫描技术的单木信息提取
2020-02-03王涛范广顺凌王章
王涛 范广顺 凌王章


摘要:近些年激光测量技术不断普及,在森林资源调查、单木三维建模等方面三维激光扫描技术具有十分突出优势,目前三维激光扫描技术在林业测量等领域有着广泛的应用,为林业工作者提供了全新的测量手段,简化了复杂的外业工作。本文主要采用地面三维激光扫描仪,采集单木点云信息,构建单木点云模型,对单木信息进行测量和提取。
Abstract: In recent years, laser measurement technology has been popularized, which has outstanding advantages in forest resources investigation, single tree 3D modeling and other aspects. At present, 3D laser scanning technology has a wide range of applications in forestry measurement and other fields, providing a new measurement method for forestry workers, simplifying the complex field work. In this paper, three-dimensional laser scanner on the ground is used to collect the single wood point cloud information, build a single wood point cloud model, and measure and extract the single wood information.
关键词:三维激光扫描;点云;单木
Key words: 3D laser scanning;point cloud;single wood
中圖分类号:TU723.3 文献标识码:A 文章编号:1006-4311(2020)02-0279-03
0 引言
林业测量能够反映森林资源变化,是森林资源调查的关键内容。以往的林业测绘基本采用皮尺和钢卷尺测量单木的信息,该方法作业周期长、效率低、劳动强度大,测量精度不高,数据简单,只能通过经验公式推算材积、树冠体积等测树因子。随测量技术的不断发展,出现了利用全站仪和摄影测量等方法,但这些方法都有一定的局限性,对树木只能进行二维分析[1-2]。三维激光测量,不与目标物接触,是通过发射高速激光测量反射目标的回波信号,利用回波形成的点云获取目标物的表面信息。本文主要利用X500三维激光扫描仪获取单木点云信息,再通过附带点云处理软件提取树高、胸径、冠幅等林木测量因子,为林木材积、树面积与体积的测定提供更全面的精准数值,有利于林木科研工作者对林业资源进行更深入探索研究[3-4]。
1 单木点云数据获取与处理
1.1 单木点云数据获取
地面三维激光扫描技术采集树木点云数据的具体操作:①布设标靶。两个相邻测站之间的标靶放置三个及以上,布置在不同高度上,保证不同扫描站数据最后坐标系的统一;②布设扫描站。在数据采集过程中,通过现场合理布设测站点,尽量保证数据采集范围内较少遮挡;③点云数据采集。在测站点上架设X500三维激光扫描仪,设置扫描角度,对单木进行扫描[5]。
1.2 单木点云数据处理
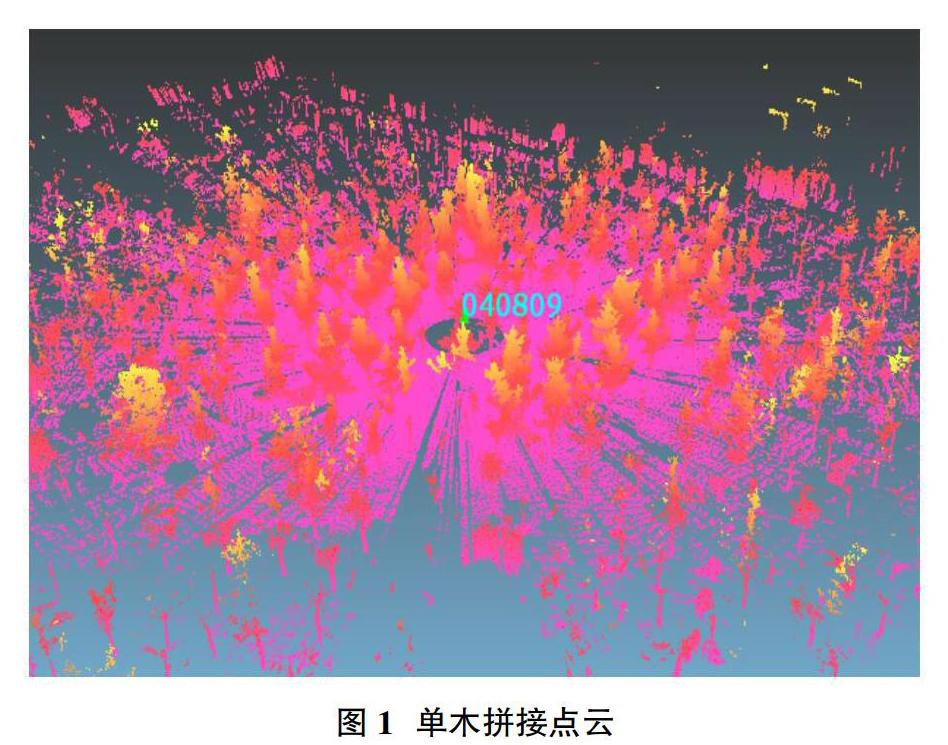
由于地面三维激光扫描仪一般以扫描仪几何中心为坐标原点采集点云数据,属于局部坐标系。本文通过在研究区域布置八个靶球,利用高精度全站仪测量其绝对坐标,借助X500随机附带的点云处理软件计算各站间点云的转换参数,完成各站点云的拼接。再对拼接后的研究区域整体点云进行去噪、抽希,使研究区域地上部分的最低点归到统一的高度,如图1所示,再对其进行点云分割,提取杆状物,如图2所示。
2 单木参数提取
2.1 胸径提取
单木胸径的提取算法与标准采用霍夫变换方法类似[6],圆的一般参数方程为:
以(a,b,r)为空间坐标轴构建坐标系,坐标系中的任一点(xi,yi)都有与该点所一一对应的一个圆锥面。霍夫变换检测圆的对应点在空间坐标系中示意图如图3所示。假如所有的点都属于同一个圆,那么它所形成的圆锥簇便会相交于空间坐标系中的某一点(a0,b0,r0),所形成的交点是该圆在空间平面上的圆心和半径。
霍夫变换检测圆在检测时是输入二维图像,因此在进行树木胸径自动提取时,必须先对研究区域树木点云进行切片,再将获取的点云数据层转变变成二维图像[7]。本文根据前面学者的研究成果,将点云数据的切片厚度定为5cm,采用平面切割工具,沿竖轴选择树高1.3m处进行单木胸径切片,如图4所示。
形成单木胸径点云切片后,将胸径点云导入Matlab,制作栅格影像,栅格影像灰度值是由(1cm×1cm×5cm)范围内所包含的采样点的数量决定,如果采样点的数量大于3个,就将此栅格单元的灰度值定为255,如果采样点的数量小于等于3个,则该栅格单元值设为0。然后将经过二值化后的栅格影像输入程序中,采用霍夫变换检测圆的方法确定树木的坐标和胸径。在检测过程中要设置阈值,如果阈值过大,空间中低频率的点会被删除,这将就会造成某些数目不能被识别出来。但是阈值如果设置过小,将会保留大量的点云数据,将造成研究区域中不存在的树木被错认为树木,图5为监测到的圆形。
2.2 树高量算
以往的测树过程中,当高度大于2m时,虽然可以采用测高仪进行测量,但是树的根部和顶部很难同时看到,本文采用激光扫描技术可有效地减小这种测高误差。为了快速获取树木基本信息,直接使用软件进行树高的测量,只保留树冠部分的点云数据,直接测量冠高和冠幅[8],如图6。
3 结论
本文采用地面三维激光扫描仪获取单木点云数据,采用霍夫变换检测圆的算法对单木胸径点云进行处理,获取单木胸径信息,单木的高度、冠高和冠幅等信息采用直接测量法获取其信息,与传统的林业测量调查方式相比,采用三维激光扫描技术效率高、可随时查验。但是本文在处理单木点云的过程中也出现了一些问题,如研究区树木间距过小、杂物遮挡等,造成部分树木胸径切片时点云数据较少,难以有效识别树木胸径截面不同方向上的差异,从而影响最终提取的精度,还有就是对于单木的高度、冠高和冠幅等信息没有完成计算机自动提取。后期将进一步结合无人机倾斜模型进行研究,完善单木信息提取算法。
参考文献:
[1]关晓平,李国辉,马岩,等.基于激光测距的树高和胸径测量方法与研究[J].浙江林业科技,2017,37(4):82-88.
[2]孙浩,刘晋浩,黄青青,等.基于二维激光扫描的立木胸径计算方法性能分析[J].农业机械学报,2017,48(8):186-191.
[3]王祺,胡洪,吴艳兰,等.基于三维激光点云的树木胸径自动提取方法[J].安徽农业大学学报,2017,44(2):283-288.
[4]杨炜静,牟洪波,戚大伟,等.基于三维激光扫描技術的原木三维图像重构[J].森林工程,2018,34(4):52-56.
[5]郑淯文,吴金卓,林文树,等.应用地面三维激光扫描对白桦单木结构参数的提取[J].东北林业大学报,2018,46(8):49-55.
[6]屈汉章,王洋,吴成茂.基于直径累积的霍夫变换检测圆算法[J].西安邮电大学学报,2017,22(5):89-93.
[7]刘伟乐,林辉,孙华,等.基于地面三维激光扫描技术的林木胸径提取算法分析[J].中南林业科技大学学报,2014(11):111-115.
[8]刘芳,冯仲科,杨立岩.等.基于三维激光点云数据的树冠体积估算研究[J].农业机械学报,2016,47(3):328-333.