铁路导航精密单点定位方法改进及性能验证
2020-02-01靳成铭蔡伯根上官伟AllisonKealy
靳成铭,蔡伯根,2,王 剑 ,2,3,上官伟,2,3,Allison Kealy
(1. 北京交通大学 电子信息工程学院,北京 100044;2. 北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044;3. 北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044; 4. 皇家墨尔本理工大学 自然科学学院,墨尔本 3001)
全球导航卫星系统(Global Navigation Satellite System, GNSS)是中国BDS、美国GPS、俄罗斯GLONASS、欧盟Galileo等系统的统称,具有全方位、全天候、全时段和高精度等特性,现已广泛用于基于位置和时间的服务。以GPS标准定位服务(SPS)为例,用户利用一台接收机即可在全球范围内大部分地区实现95%时间内水平3 m、垂直5 m的定位精度[1]。
随着GNSS技术的发展,先后出现了多种基于伪距和载波相位的差分技术。其基本原理是通过在确定位置建设参考站,实现对观测量的连续观测,并向移动站(即用户)提供额外的差分改正信息,使得用户能够消除观测量中的大部分误差项,从而提高位置和时间的解算精度。其中,以伪距为主要观测量的DGNSS(Differential GNSS)技术能够实现动态分米级定位精度,而以更精密的载波相位为主要观测量的载波相位差分技术则可以实现动态分米级甚至厘米级精度,静态精度可达厘米级至毫米级[2]。
近十余年来,精密单点定位(Precise Point Positioning, PPP)技术得到了飞速发展。PPP不需要建设传统差分定位方式所需的地面参考基站,使用码和载波相位观测值,结合精密星历和时钟等产品,对影响解算精度的各误差项进行改正,进而提高观测量的精度,最终获得高精度的目标接收机钟差、位置等未知参数结果。PPP一词来源于美国喷气推进实验室(JPL),其可行性和基本原理最早被Zumberge等[3]、Kouba等[4]所讨论。因其全球范围内精度高、实时性较差等特点,在地理信息科学中的地壳形变监测、气象学中的对流层延迟估计等领域得到了广泛的应用,PPP也可以提供精密授时功能。随着加拿大自然资源部(Natural Resources Canada, NRC)、GNSS服务组织(International GNSS Service, IGS)等国际组织所提供的精密时钟和轨道等服务的日益完善,PPP的实时性问题正在逐步改善,因此也被更多的应用领域所关注。基于BDS的PPP定位精度略低于GPS,其中的动态精度差别最明显,主要原因在于BDS星座几何结构相对GPS较差,在轨服务卫星数量也相对较少,同时轨道和时钟产品精度也相对较低,但基于BDS的PPP依然达到了分米级定位精度[5]。
卫星导航在我国铁路安全定位领域中的应用主要为导航应用[6]、控制测量、形变监测等,其中的导航应用以列车运行控制系统测速定位为主。我国列车运行控制系统(Chinese Train Control System, CTCS)当前最高等级的CTCS-3采用车载里程计进行列车位置推算,并通过地面间隔布设的应答器来修正累积误差,最终实现列车定位。为了消除累积误差保证定位精度,需要在轨旁大量布设应答器,建设和运维成本高,难以适应自然环境苛刻的偏远地区的低密度线路以及现代基于通信的列车运行控制系统对于成本及性能的需求[7]。一种有效的解决方法是GNSS,因为不存在累积误差,因此可以减少轨旁设备[8]。在下一代列控系统研究中,欧洲ETCS(Europe Train Control System)、中国CTCS、美国PTC(Positive Train Control)系统均提出了以车载为中心、基于GNSS的列车自主定位等基本原则[9]。
以列控系统为代表的铁路导航定位应用通常采用DGPS技术,为保证精度需要使用差分基站,我国青藏铁路格尔木至拉萨段采用的信号系统便是基于DGPS定位的ITCS系统,沿线设置了众多的基站,带来了大量的建设和运维成本。基于非差码和载波相位的PPP技术能克服这一缺点,在无参考站精度增强的情况下实现全球尺度动态分米级的高精度解算。伴随着PPP技术向实时化方向所取得的进展,IGS已经可以提供PPP实时服务(RTS),并且已经出现了商用的实时PPP系统Trimble RTX[10]。当前,实时动态PPP精度在分米级,但仍需要15 min左右的收敛时间[11]。为提高定位结果的可用性,PPP技术通常需要与惯性传感器等组合使用,收敛后水平动态精度仍然能够保持在分米级[12-14]。
实时PPP(RT-PPP)是PPP技术发展的重要方向,因实时性问题,国内外尚未开展基于PPP的铁路导航定位应用研究,随着RT-PPP的到来,有必要对PPP铁路导航应用的可行性进行评估,为技术升级提供依据。同时,铁路导航应用中使用的数字轨道地图,在制作中对于实时性要求不高,PPP同传统基于DGNSS等制图方法相比,具备精度、成本等优势。基于GNSS的定位同传统的铁路定位方式相比,传感器不仅包括轨旁设备,还同导航星座有关,因此定位性能随环境不同而变化,需在实际的运行环境下进行评估和验证[15]。同时,针对铁路导航定位应用的高安全属性,需要设计可信的质量控制方案,以有效剔除滤波过程中的粗差。本文以铁路实际应用为背景,通过对铁路现场数据的采集和处理,评估了CSRS-PPP(Canadian Spatial Reference System-PPP)软件性能,研究了PPP技术在铁路导航定位应用中的可行性,通过引入惯性传感器和质量控制,给出了可行的铁路精密单点定位应用方法。
1 精密单点定位技术
PPP工作原理见图1。精密单点定位使用非差码和载波相位观测量,根据不同的使用频率可以分为双频和单频PPP[16-17],两种方式使用不同的观测量组合模型。传统PPP模型[18](Traditional PPP Model)是一种常用的观测量组合模型,使用双频GPS码和载波相位观测量,并通过双频消电离层组合(Ionosphere-free Combination, IF)构建组合观测量,组成含有未知参数的方程组,结合NRC、IGS等提供的修正产品对观测量中的各误差项进行模型纠正,剩余的误差项则和估计目标的位置等参数作为未知量进行参数估计,常用的方法为卡尔曼滤波和最小二乘。

图1 PPP工作原理
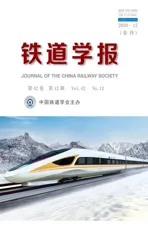
从2003年开始,加拿大自然资源部使用CSRS-PPP软件,提供在线的PPP服务,用户通过在线提交GNSS观测文件就可以得到全球范围内的高精度定位结果。CSRS-PPP可以处理静态或动态模式下的GNSS单频或双频观测文件[19]。 图2显示了两个不同软件版本动态解算的误差,其中ECEFx、y、z表示地心地固坐标系的x、y、z三个方向轴。
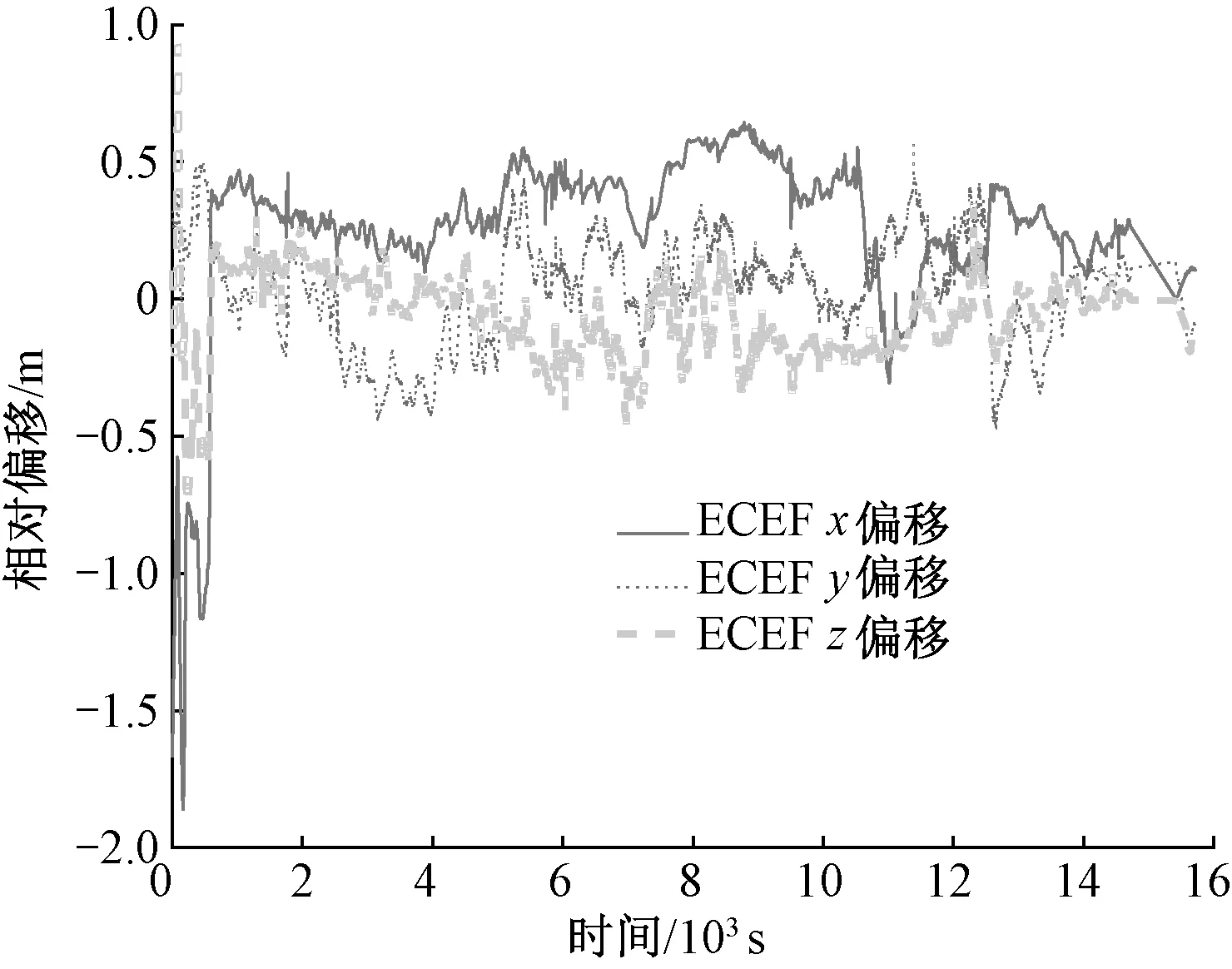
图2 CSRS-PPP不同版本解算结果
CSRS-PPP采用的传统PPP模型的观测方程为
( 1 )
( 2 )
MCOR=MRA+MSAG-MTID+WCOR+MION2+MPCV
( 3 )

为卫星端的码、相位偏移;
为目标接收机端的码、相位偏移;εP、εL为噪声以及潜在的多径影响,其他未建模的载波相位、码误差;

为卫星的位置;MRA为相对论影响;MTID为地球潮汐造成的位置迁移;MSAG为地球转动造成的萨格纳克效应;MION2为二阶电离层延迟影响;WCOR为卫星端天线的相位卷积;MPCV为接收机相位中心偏移。

( 4 )
( 5 )
式中:f1、f2为观测频率。使用精密卫星产品的纠正后,式( 4 )和式( 5 )可整理为最终的传统PPP模型估计方程。
( 6 )
式中:NIF为具有非整数特性的载波相位模糊度。
PPP在解算前不仅要对运行参数进行设置,还需要提供多个外部输入文件,多用于对各建模误差项的纠正,如表1所示。
输入文件的实时性决定了PPP的实时性,由于IGS精密时钟和星历、GNSS卫星差分码偏移等信息目前尚未实现实时发布,因此软件实时性较差。由此推知,输入文件实时性的改善将提高PPP的实时性。PPP采用最小二乘法完成观测方程的求解,可输出各历元的接收机钟差、位置等未知参数。
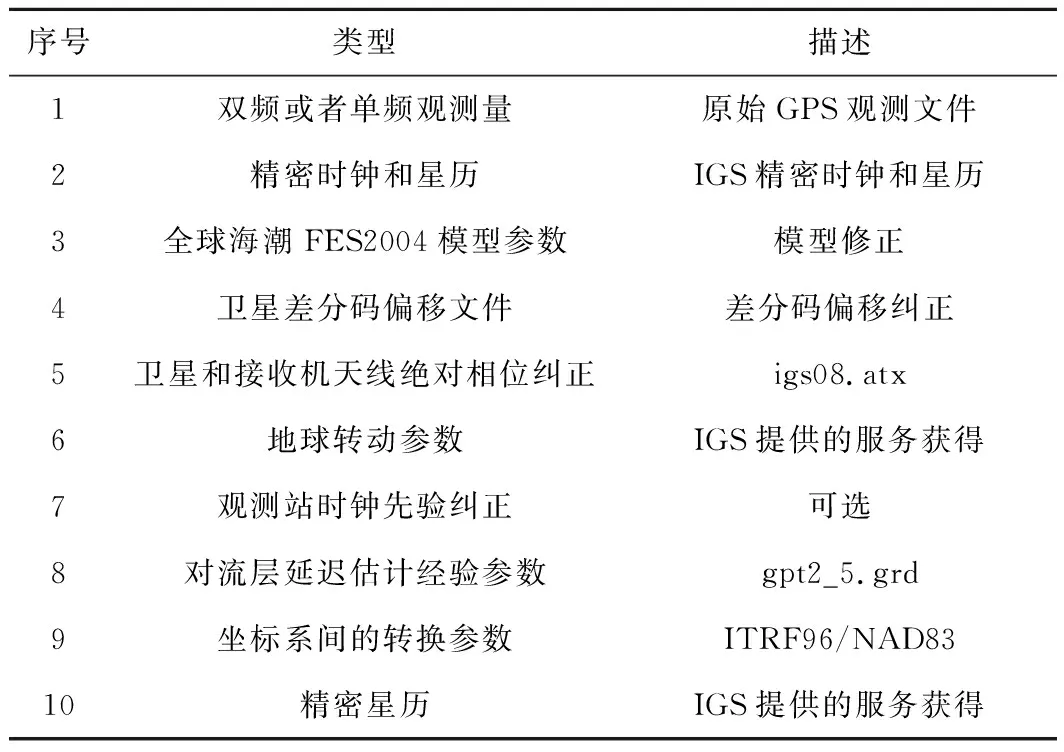
表1 输入文件
2 PPP在铁路导航定位的应用性能分析
为验证PPP在铁路应用中的性能,试验采用NavCom SF-2050 接收机采集GPS双频码以及载波相位观测量,见图3,其接收机的天线型号为NAVAN2004T,并已包含在天线相位纠正文件igs08.atx中。参考系统则为NovAtel的SPAN ProPak6 GNSS 接收机,两个接收机天线的相对位置已知并靠近安装。整个试验由静态、动态两部分组成,并设置了不同的参数,以满足分析需要。
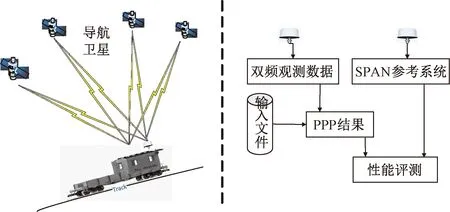
图3 试验方案
2.1 实时性验证
精密单点定位的实时性受输入文件实时性的限制,因此PPP的实时性较差。提供实时服务也是IGS等国际机构的发展方向。在静态解算中,除了输入文件的限制,PPP要收敛到标称的厘米级精度,仍需要较长的收敛时间。
分别采集两处地点的GPS双频观测文件开展相关的研究,本次试验评估了PPP在静态模式以及动态模式下的收敛性。当PPP工作在静态模式时,GPS观测量的输出周期为30 s,采集时长约4 h。图4为静态定位误差,结果表明精密单点定位收敛到分米级精度需要约15 min。

图4 静态解算结果
图 5为当GPS观测周期为1 s时,PPP的动态解算误差。试验结果表明,精密单点定位收敛到分米级定位精度需要超过30 min。在初始的解算阶段,由于载波相位模糊度的估计精度不足,需要足够多的观测历元来确定模糊度参数。因此,在精密单点定位的解算过程中,随着观测历元的逐渐增加,模糊度逐渐确定,进而使解算误差趋于收敛。

图5 动态解算结果
试验结果表明,在静态模式下,即便PPP能够获取到实时输入文件,仍然需要较长的时间才能将定位误差收敛到分米级,期间其定位误差最高可达2.5 m。在动态模式下,受环境影响定位误差可达5 m。
2.2 可用性验证
在不存在遮挡的静态工作模式下,精密单点定位可以输出连续的解算结果。然而,在动态工作模式下,遮挡会导致观测量不足。而且,图6中动态观测条件下接收机会出现观测量为零的情况。分析数据表明,PRN 16号卫星的P2、L2观测值异常,显示为零。所以,当精密单点定位设置为使用双频消电离层组合解算时,由于L2频段的观测量缺失,对应的历元无解算结果输出。图7中试验一共采集了12 000个历元的观测量,而观测值的缺失导致了有若干历元无法获得解算结果。进一步分析发现,这种情况导致的解算失败间隔较短,试验中通常不超过10个历元。因此,为了能够输出连续的定位结果,可以采用精密单点定位和惯性导航组合的方式,提高定位结果的可用性。

图6 动态解算(0.5:解算成功,0.7:解算失败)

图7 解算失败间隔(0.5:解算成功,0.7:解算失败)
2.3 安全性验证
周跳是在接收导航卫星载波信号时,接收机由于某种原因导致载波相位跟踪环路的计数停止,随后又恢复载波相位整周计数,导致载波相位周期的计数值有一个整数周的跳变。如果不能准确探测并修复周跳,将导致定位精度降级,影响定位应用的安全性和结果的可信度。
为验证PPP对周跳的探测和修复性能,试验以故障注入的方式向观测量中添加周跳,添加的时间设置为解算结果收敛到厘米级精度时,将固定偏移的周跳添加到所有可见卫星的观测值中,并持续到观测结束。图8所示试验中的PPP能够准确探测周跳,对于解算精度没有影响。
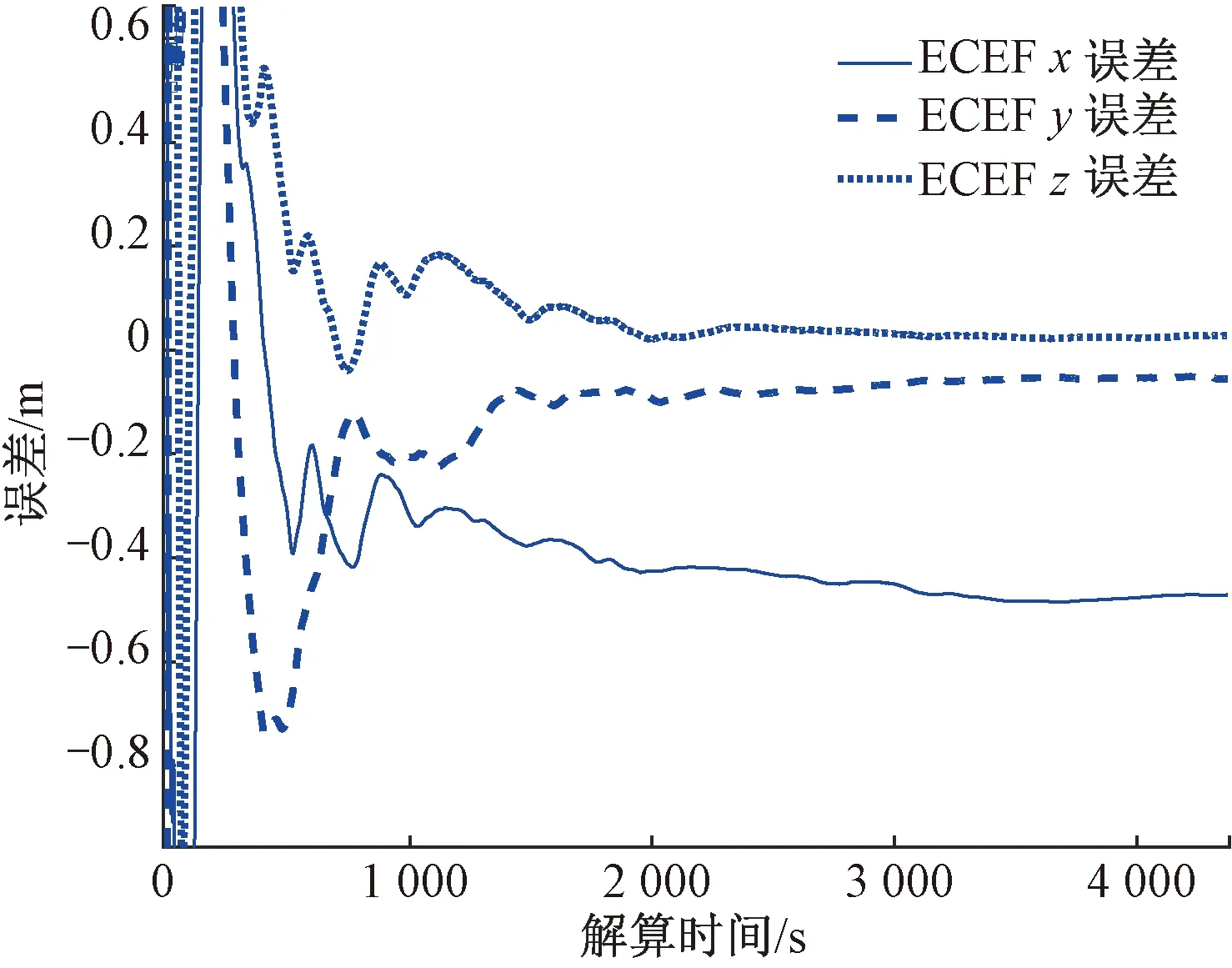
图8 10 m周跳解算
除了自身解算算法对结果的影响,输入文件的可信度也直接影响解算结果,PPP在程序初始阶段,会设置固定的码、载波相位观测精度等参数值作为参数估计的输入,这些参数具有普遍性,但可信度较低,不能完全符合当前特定观测地的参数特征。因此,目前PPP的解算结果无完备的安全性保障。
3 改进的铁路精密单点定位应用方法及验证
3.1 方法介绍
铁路导航应用是一种实时和高安全应用,同时,根据我国《铁路技术管理规程》中关于相邻线间距的规定,为了能够区分区间和站内股道,定位精度应优于2 m。由上一节铁路应用环境下的性能验证可知,当PPP收敛后精度可优于2 m,但由于历元缺失存在可用性问题。
图9给出了改进的铁路精密单点定位应用方法,为提高定位方法的可用性,引入了惯性传感器。

图9 改进的铁路精密单点定位应用方法

( 7 )

卡尔曼滤波虽然能够输出连续的定位结果,但结果的可信度难以保证,因此引入适合同卡尔曼滤波结合使用的误差探测、诊断、修复(DIA)算法[20]实时监测融合结果的可信度,进行质量控制。
DIA[21]本地测试(Local test)能够探测卡尔曼滤波器中的观测误差,而整体测试(Global test)能够验证滤波模型的可信性。探测阶段使用的检验统计量tk为
(8)
式中:vk为卡尔曼滤波测量新息;Qvk为新息的协方差矩阵;mk为历元k时的观测数量。如果检验统计量大于参数为(mk,∞)的中心F分布概率的上限值,则探测到观测误差并进入误差诊断阶段,识别统计量为
(9)
式中:Ci为 [0 … 1 … 0]T,即其仅第i个元素为1,其余均为0。误差被识别定位至某观测量后进入误差修复阶段,DIA可以剔除观测误差,并重新更新卡尔曼滤波参数为
(10)
(11)
(12)
(13)
(14)

3.2 方法验证
为验证所提出的铁路精密单点定位应用方法的性能,试验在青藏铁路现场采集了原始的观测数据,使用列车搭载的车载设备采集、存储GPS双频等原始观测数据,然后采用后处理的方式进行定位应用方法的验证,惯性导航数据由仿真方式获得,设置输出频率为10 Hz。试验中使用NavCom SF-2050接收机采集GPS双频码、载波相位观测量,参考系统则为NovAtel的ProPak6 GNSS 接收机,两个接收机天线的相对位置已知并靠近安装。图10为车载终端。

图10 车载终端
(1)单PPP解算
试验期间采集了4个多小时的原始数据,由于在部分历元中观测信号缺失,期间精密单点定位无定位结果。本文截取了其中约1 h数据做精密单点定位后处理,从而获得解算结果。图11为经过精密单点定位解算后的全程定位误差,需要说明的是图11中的10 m误差为无观测信号时设置的固定数值,不代表真实误差值。试验结果表明,在动态模式下,当精密单点定位需要重新确定载波相位模糊度时,将导致一个明显的收敛时间,收敛期间的动态误差可超过10 m,而无信号缺失下的定位误差在5 m以内。

图11 全程实验数据
图12中当所有设备均正常工作,GPS信号接收正常的情况下,以差分定位结果为参考,动态精密单点定位的垂直误差较大,但垂直和水平误差优于1 m。分析数据表明,由于观测量不足,精密单点定位的解算存在两处短暂的中断,而中断时间分别为34 s和4 s。

图12 1 h PPP结果
(2)卡尔曼滤波解算
试验测试了卡尔曼滤波器的性能,列车运行轨迹见图13,图14和图15分别给出了PPP/INS扩展卡尔曼滤波(EKF)定位误差和线性卡尔曼滤波(LKF)定位误差,两种滤波器的主要区别在于EKF使用线性化的状态转移矩阵。结果表明,同单PPP定位相比,EKF组合定位方式能够在精度不降级的情况下提供连续、高频定位结果,从而改善了单PPP定位中存在的因观测量短暂不足导致的可用性问题。如果GNSS观测量长时间不足,当观测恢复后,PPP因存在收敛时间,定位误差较大,同时INS也会因为误差累积而降级,影响后续组合定位的精度。
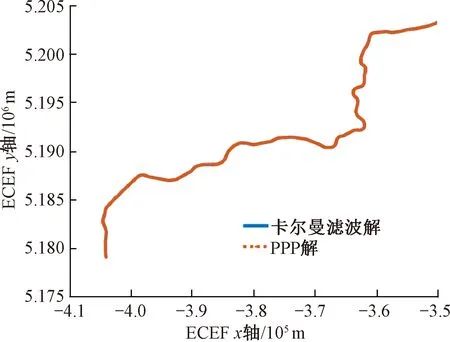
图13 列车运行轨迹

图14 组合定位结果-1
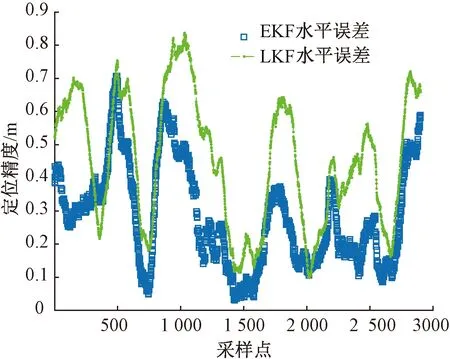
图15 组合定位结果-2
4 结束语
本文基于加拿大自然资源部CSRS-PPP软件介绍了传统精密单点定位解算原理。通过铁路现场采集的数据分析了PPP技术在铁路导航定位应用中所面临的实时性、可用性和安全性问题。结果表明,受可用性和安全性限制,PPP在收敛后仍无法满足铁路实时导航定位应用的需求。为此,提出了一种改进方案,通过引入惯性传感器来改善定位的可用性,同时,为改善组合定位的安全性,引入DIA质量控制方法进行滤波过程中的误差探测和修复。结果表明,组合定位方法能够有效提高基于PPP的铁路导航定位应用的可用性。
当前,在IGS等国际组织的努力下,PPP正在迈向实时解算,如何设计合理的方案,将最新的服务产品用于基于PPP的铁路导航定位应用,同时提高质量控制的性能是下一步需要重点解决的问题,PPP技术将为基于卫星导航系统的铁路应用提供一种新的思路。