轮式磁吸附超声检测爬壁机器人的设计与吸附稳定性分析
2020-01-18李杰超曹力科肖晓晖
李杰超,曹力科,肖晓晖
(武汉大学动力与机械学院,湖北武汉,430072)
吸附式爬壁机器人属于特种机器人,将地面移动机器人技术与吸附技术结合起来,能够携带工具代替人工在高强度、高风险的情况下进行探测、油漆喷涂、污垢清除、焊缝修形、焊接等作业,降低了操作危险,提高了作业效率[1-4]。针对铁磁壁面的缺陷检测作业,要求爬壁机器人具有可靠的吸附能力,并且与检测功能融合。国内外学者对爬壁机器人的吸附方式进行了研究。KOH等[5]提出了静电与弹性体吸附机构混合的爬壁机器人,MINOR等[6]提出了采用欠驱动结构的双足四关节吸盘式爬壁机器人,TOHRU等[7]提出了基于真空吸附式的采用1个吸盘和2个独立驱动轮的爬壁机器人,真空吸附方式不受壁面材料的限制,但吸附力易受壁面光整度的影响。DANIEL等[8]提出了基于定向黏合结构的Stickybot仿生爬壁机器人,能够在光滑竖直表面以4 cm/s的速度爬行,但负载能力不足。朱志宏等[9]提出了基于负压吸附原理的爬壁机器人,其吸附力容易控制,但吸附稳定性不足。而磁吸附爬壁机器人对壁面要求低,同时可保证负载能力,如SHEN等[10]提出的履带式永磁吸附爬壁机器人,负载可达到30 kg以上。磁吸附方式有永磁轮式[11]、磁性履带式[12]和永磁间隙式[13]。机器人的负载能力与运动灵活性互相矛盾[14],永磁轮式爬壁机器人运动灵活性好,但负载能力差,磁性履带式爬壁机器人负载能力好,但运动灵活性差,耗能多;机器人的负载能力与机器人体积也互相矛盾,永磁轮式爬壁机器人将永磁铁布置在车轮上,不增大机器人的底盘尺寸,永磁间隙式爬壁机器人将永磁铁布置在底盘上,增大了机器人的底盘尺寸,但负载能力比永磁轮式爬壁机器人的更优。因此,综合考虑负载能力、运动灵活性以及机器人体积,选择永磁轮式爬壁机器人。在爬壁机器人与检测技术的融合方面,位雷雷[15]提出了轨道客车焊点超声检测爬壁机器人;田兰图[16]提出了基于涡流检测的油罐检测爬壁机器人。虽然这些爬壁机器人实现了与检测技术的融合,但存在检测步骤不完整、检测效果不足的缺点,缺少壁面打磨、耦合剂涂抹以及缺陷标记等步骤,检测机构设计的标准化和集成式是未来的发展方向。针对铁磁壁面的缺陷检测需求,为实现磁吸附爬壁机器人与超声检测技术的融合,本文作者提出了一种融合集成式超声检测机构的轮式磁吸附爬壁机器人结构方案,分析了机器人在不同工况下稳定运行的吸附力条件和电机扭矩条件,并对机器人样机进行了试验,验证了设计的合理性和可行性。
1 轮式磁吸附超声检测爬壁机器人结构方案
1.1 轮式磁吸附超声检测爬壁机器人整体方案
要实现机器人在铁磁壁面上移动检测作业,需满足以下要求:1)在壁面上灵活运动,小型化、无缆化;2)融合壁面缺陷检测功能。
1)吸附方式:基于吸附力稳定、运动灵活、耗能少、体积小、质量轻等优势,为满足机器人在铁磁壁面灵活移动作业的要求,设计机器人时采用永磁轮式。
2)检测方式:在壁面缺陷检测中,超声检测技术以其低廉的成本、广泛的检测范围、相对较高的检测精度等优势获得了普遍应用[17]。目前国内外主要采用传统的压电超声方式来激发导波。但是,使用压电超声换能器要受到一定的限制,粗糙表面需要经过打磨、涂抹纯净的耦合剂来进行检测。
3)检测作业分析:完整的检测作业包括壁面打磨、耦合剂涂抹、超声检测和缺陷标记4个步骤。这些步骤要通过相应的机构来完成,且要方便调整机器人位姿,因为打磨区域、涂抹区域、检测区域和标记区域是相同的,所以在设计机器人时,对机构的布置和集成提出了要求,而这一点对机器人的小型化将起到很大的作用。
1.2 集成式检测机构设计
为了提升检测爬壁机器人的性能、使用的方便性和通用性,并且减小机器人尺寸、降低检测作业控制难度,设计了集成式检测机构,如图1所示。
检测机构按照集成式的思路,分别设计了涂抹模块、检测模块、标记模块3个部分并实现集成。集成式检测机构独立于机器人本体之外,通过螺栓实现与机器人底盘的连接,便于拆卸和维修。相对于3种单独的功能装置,集成式检测机构减少了驱动数目,减小了在底盘上所占空间,避免了因搭载装置多导致机器人尺寸过大,有助于实现机器人小型化设计,同时降低了机构成本。
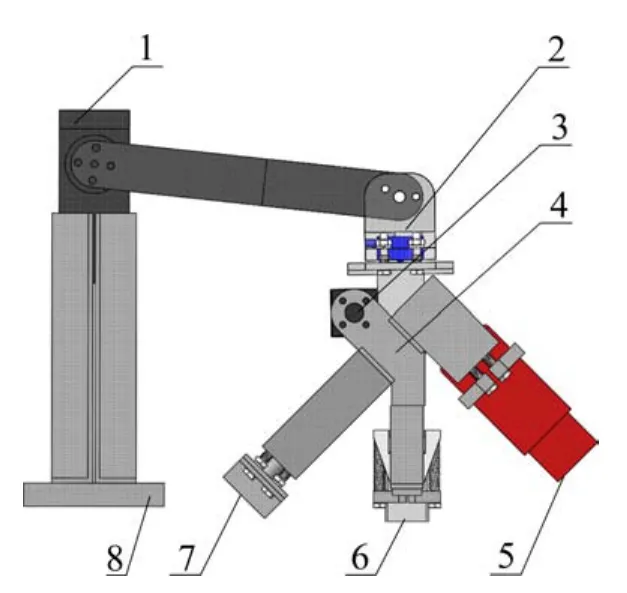
图1 集成式检测机构示意图Fig.1 Schematic of integrated testing institution
检测机构采用双关节的设计,其中以舵机1驱动的旋转压紧关节实现检测机构对壁面的贴紧,以舵机2驱动的旋转切换关节实现涂抹、检测和标记3个功能模块的切换。在旋转压紧关节和旋转切换关节的中间连接处设计安装力传感器以实现检测机构对壁面压紧力的稳定和可控;在3个功能模块的末端连接处采用被动适应机构以提供对不平整壁面自动适应的能力,同时减少动力装置,有利于减小检测机构的质量和尺寸,且可以进一步减少检测机构自由度的控制数;设计3个功能模块在同一高度,即舵机1的同一个位置信号即可对舵机2选择的3种装置起到控制贴紧壁面的作用,极大地减小了检测机构的控制难度;同时,3个功能模块处于机器人同一轴线上,保证了与检测壁面接触区域的一致。
涂抹模块通过齿轮齿条机构以一定的速度将耦合剂经软胶管挤压到耦合剂盒,进而将耦合剂涂抹在打磨过的壁面上。耦合剂盒设计为多孔结构以实现耦合剂的直接涂抹,同时多孔结构的有效涂抹面积与探头面积设计相同以避免二次涂抹,提高了检测效率。检测模块通过将超声导波探头与涂抹有耦合剂的区域接触以实现检测。在检测发现缺陷时,标记模块对该区域进行缺陷标记,方便后续的维修作业。
1.3 爬壁机器人本体结构设计
基于轮式磁吸附超声检测爬壁机器人整体方案设计爬壁机器人模型,如图2所示。机器人采用2个舵机(电机模式)驱动的主动轮以差动驱动方式实现机器人整体运动,采用2个从动轮作为辅助支撑轮实现与壁面的稳定接触,同时2个驱动轮采用前后交叉平行的布置方式以减小机器人的横向尺寸。机器人携带移动电源以减少机器人高空作业时的额外负重,同时提高运动灵活性,扩大作业空间。
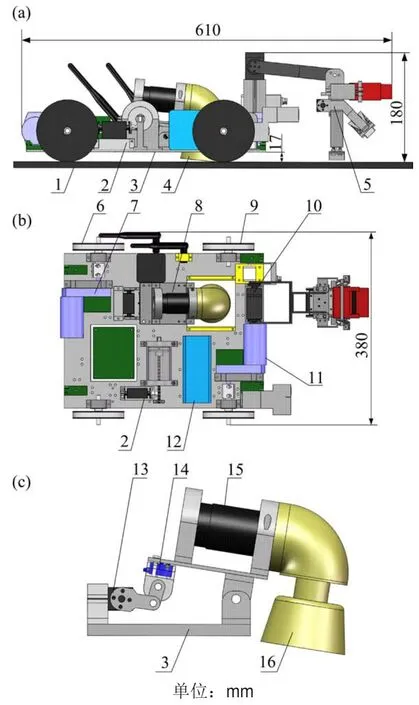
图2 爬壁检测机器人示意图Fig.2 Diagram of wall climbing robot for detection
机器人的4个磁轮是主吸附体,同时,将所有装置和机构集中布置在底盘上,减小机器人的倾覆力矩,以保证机器人不发生脱落、倾覆和滑移,实现机器人全位置安全可靠作业。每个磁轮采用轭铁-永磁铁-轭铁(外缘包橡胶轮胎)的结构以保证吸附力,保护永磁铁不受破坏,同时单个磁轮可并列安装2个以上的永磁铁以增大吸附力。打磨机构与检测机构中轴线重合,机器人只需前后移动即可实现对打磨区域的检测作业。耦合剂挤压通过舵机驱动的齿轮齿条机构来实现。
打磨机构采用马达驱动以实现对壁面的打磨,采用舵机驱动,通过四杆机构传动实现打磨头对壁面的贴紧,同时设计安装力传感器以实现打磨机构对壁面压紧力的稳定和可控。其中打磨头采用工业用钢丝刷打磨头,打磨马达与锥齿轮减速箱采用对角磨机零件设计制作。
2 轮式磁吸附爬壁机器人吸附稳定性分析
机器人在检测作业时,会受到自重、打磨装置重力以及耦合剂重力对机器人质心的影响,同时会受到打磨机构、检测机构压紧力对机器人反作用力的影响,使机器人有滑落和倾覆的趋势。另外,磁轮的吸附力并不是越大越好。磁力越大,机器人稳定性更高,但会使灵活性降低、机器人质量更大。因此,在保证稳定性的同时,使机器人具有较高的灵活性,有必要对机器人在壁面上的受力进行分析,以提供轮系设计的理论依据[18],对永磁铁和电机的选型具有指导意义。与文献[11]相比,本文的力学稳定性分析不仅考虑移动平台的受力,还考虑搭载在机器人平台上的其他机构、零部件的重力、对机器人质心的影响以及检测作业时壁面对机器人的反作用力。针对横向、竖直、转弯和悬壁4种姿态,分析机器人的吸附力条件和电机扭矩条件,姿态定义如图3所示。
2.1 横向姿态
2.1.1 静止状态
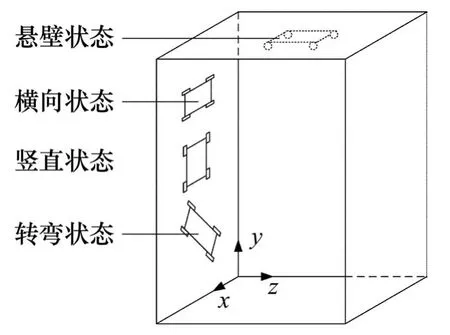
图3 机器人姿态示意图Fig.3 Diagram of robot state
横向姿态下机器人静止受力图如图4所示,其中,为4个磁轮受到的摩擦力;Ni和分别为4个磁轮受到的支持力和吸附力,4个磁轮吸附力相同,因此用FN表示;G为机器人的重力;O为机器人的质心,O1为力矩作用点,O2为力作用点;x1,x2和z分别为机器人质心与前后磁轮轴线、壁面的距离;d1为机器人两磁轮的横向距离。

图4 横向姿态下机器人静止状态受力示意图Fig.4 Transverse forces of robot in quiescent state
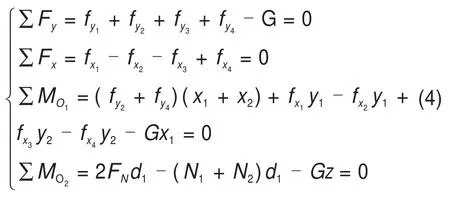
由图4可知机器人的平衡方程式为
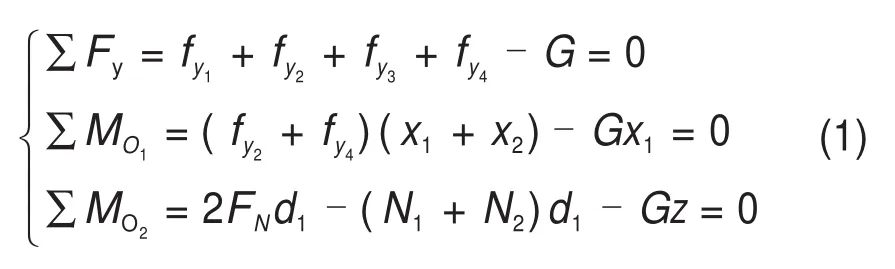
式中:∑Fy为机器人在y方向所受的合力;和分别为机器人受力对O1和O2的力矩。
为防止磁轮打滑,应小于最大静摩擦力fmax,因最大静摩擦力不易求得,以μFN代替。另外,为防止机器人外翻,磁轮的支持力Ni应大于0 N,故有:
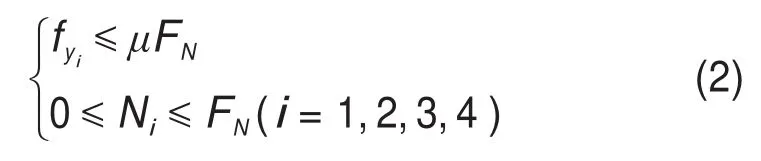
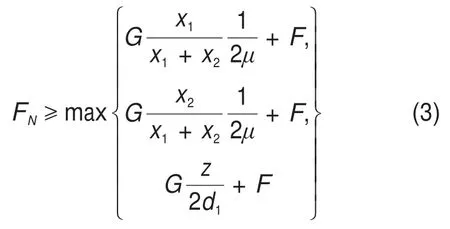
式中,μ为磁轮与铁磁壁面的滑动摩擦因数。静止状态下,考虑打磨机构、检测机构压紧力对机器人反作用力的影响,吸附力应增加附加力F。联立式(1)和式(2),可得机器人稳定的吸附力条件为
2.1.2 运动状态
横向姿态下机器人运动受力图如图5所示。与静止状态不同的是,机器人运动时受到x方向的摩擦力,其中和为主动轮受的摩擦力,和为从动轮受的摩擦力;v表示前进方向,y1和y2分别为两侧磁轮截面与质心间的距离。
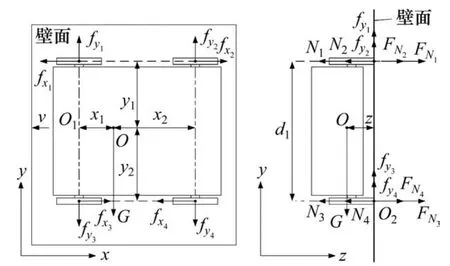
图5 横向姿态下机器人运动状态受力示意图Fig.5 Transverse forces of robot in movement state
由图5分析,机器人的平衡方程式为
式中:∑Fx为机器人在x方向所受的合力。

运动状态下,不需考虑打磨机构、检测机构压紧力对机器人反作用力的影响。联立式(4)和式(5),简化计算可得机器人稳定的吸附力条件为
2.2 竖直姿态
竖直姿态下机器人静止受力图和运动受力图分别如图6和图7所示,其中,O3为力作用点;d3为机器人前后磁轮轴线间的距离。

图6 竖直姿态下机器人静止状态受力示意图Fig.6 Vertical forces of robot in quiescent state
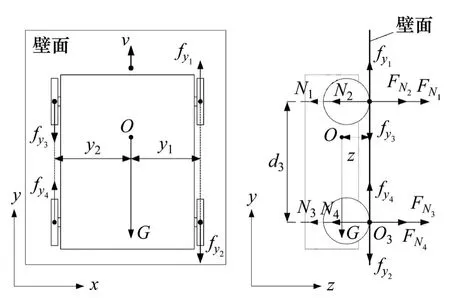
图7 竖直姿态下机器人运动状态受力示意图Fig.7 Vertical forces of robot in movement state
2.3 转弯姿态
转弯姿态下机器人静止受力图和运动受力图分别如图8和图9所示,其中,O4为力作用点;l0为重力与O4间的距离,l1,l2和l4分别为摩擦力,与O4间的距离,m1,m2和m3分别为支持力N1,N2和N3与O4间的距离;θ为机器人轴线与y轴的夹角。
2.4 悬壁姿态
悬壁姿态下机器人静止受力图和运动受力图分别如图10和图11所示。
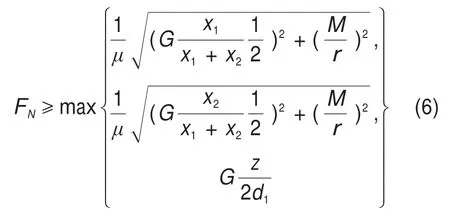
综合4种姿态下的吸附稳定性分析,可得机器人稳定的吸附力条件和电机扭矩条件分别为:
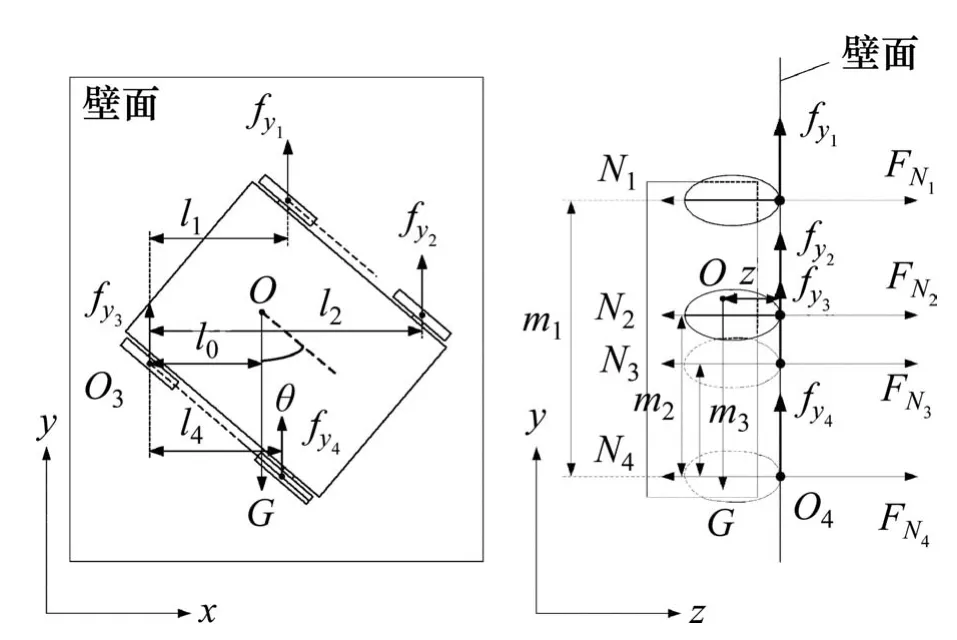
图8 转弯姿态下机器人静止状态受力示意图Fig.8 Turning forces of robot in quiescent state
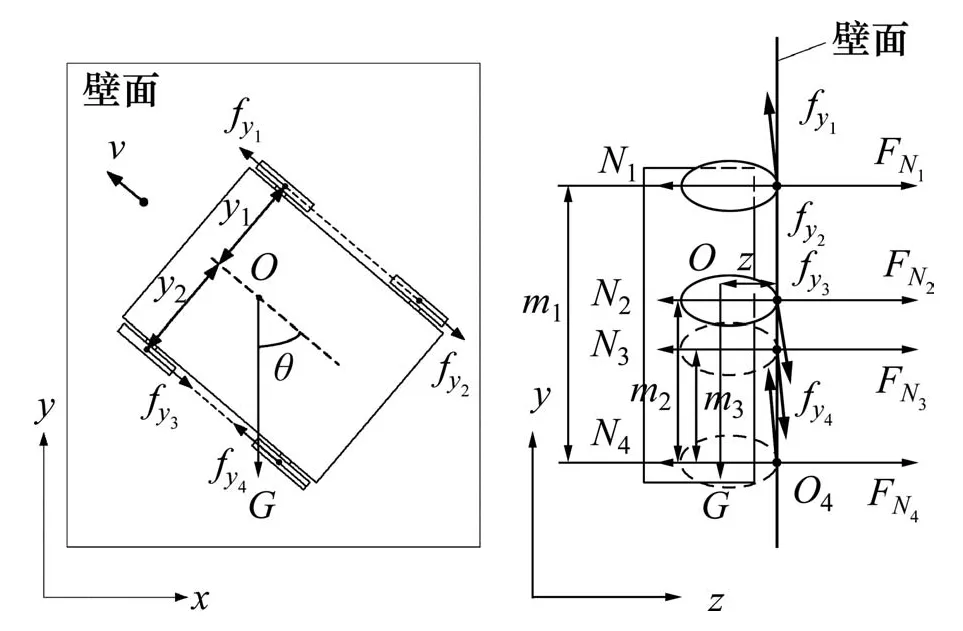
图9 转弯姿态下机器人运动状态受力示意图Fig.9 Turning forces of robot in movement state
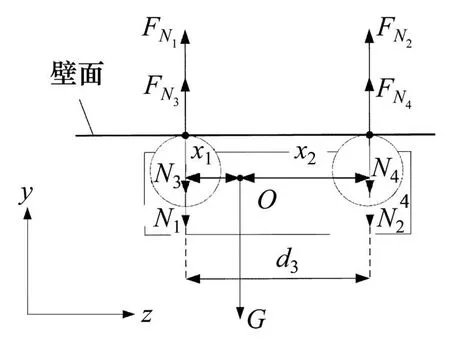
图10 悬壁姿态下机器人静止状态受力示意图Fig.10 Hanging forces of robot in quiescent state
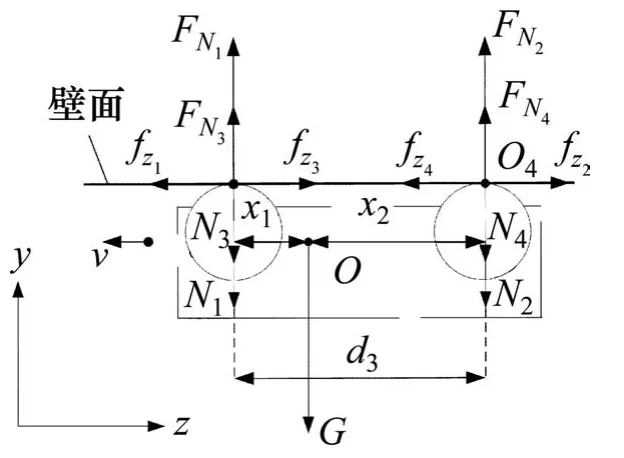
图11 悬壁姿态下机器人运动状态受力示意图Fig.11 Hanging forces of robot in movement state

3 轮式磁吸附超声检测爬壁机器人样机试验
基于轮式磁吸附超声检测爬壁机器人结构方案以及吸附稳定性分析所得吸附力条件和电机扭矩条件,设计并制造机器人样机,如图12所示,其主要结构参数见表2。
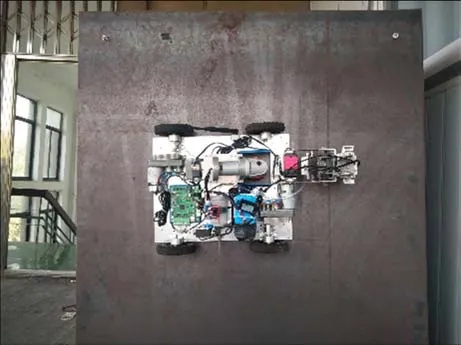
图12 轮式磁吸附超声检测爬壁机器人样机Fig.12 Prototype of wall climbing robot based on wheeled magnetic adsorption for ultrasonic detection
为验证轮式磁吸附检测爬壁机器人的技术可行性,在铁磁壁面上进行了机器人运动试验和缺陷检测试验。
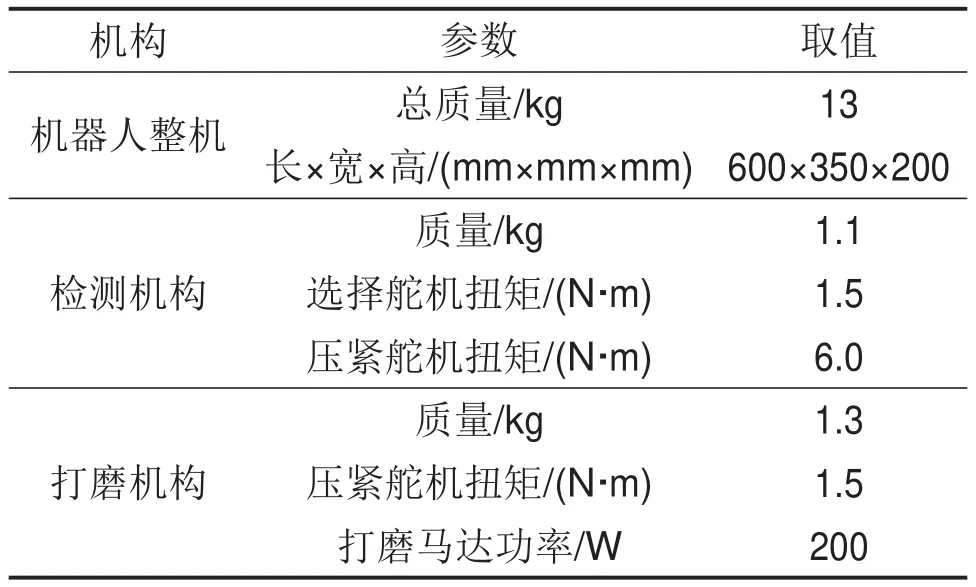
表2 爬壁机器人样机主要结构参数Table 2 Structure parameters of wall climbing robot
3.1 爬壁机器人运动实验
机器人运动试验包括机器人横向运动、竖直运动和转向运动。机器人可以稳定吸附在铁磁壁面上。图13(a)所示为机器人运动路径示意图,运动过程为①竖直直行、②左转、③横向直行、④右转、⑤竖直直行5个阶段。图13(b)所示为运动过程中陀螺仪角度α的变化曲线,与机器人运动路径序号相对应。从图13可以看出,陀螺仪数据随机器人的运动而连续变化,机器人稳定吸附在铁磁壁面上,没有发生脱落、傾翻和滑移。机器人样机的主要性能参数见表3。
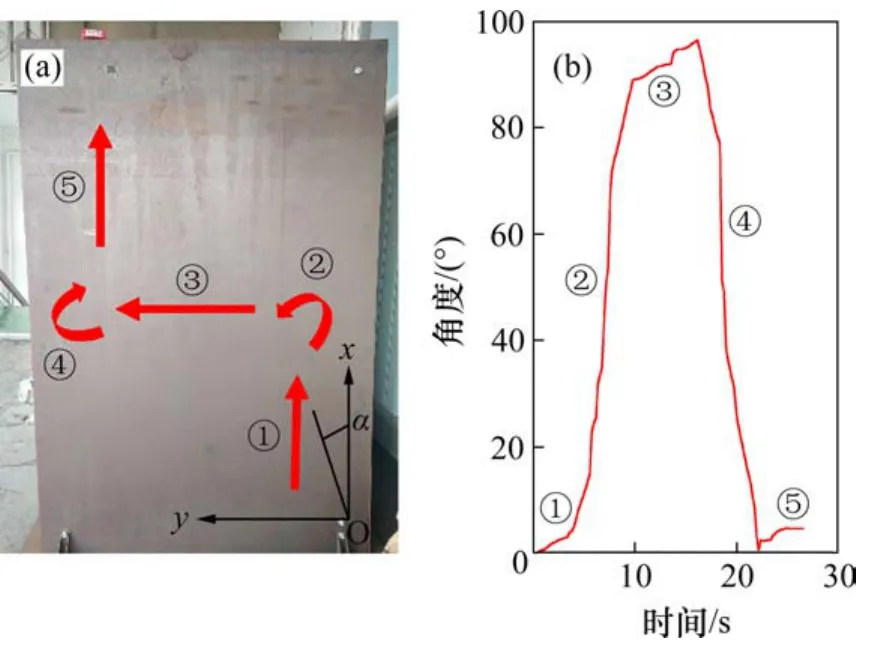
图13 爬壁机器人运动曲线Fig.13 Diagram of motion path of wall climbing robot

表3 爬壁机器人样机主要性能参数Table 3 Performance parameters of wall climbing robot
3.2 爬壁机器人缺陷检测试验
机器人缺陷检测试验包括壁面打磨试验、耦合剂涂抹试验、超声检测试验和缺陷标记试验,其中超声检测试验只做超声探头与检测壁面的贴紧。在缺陷检测试验过程中,机器人若干典型姿态如图14所示。由图14可见:机器人可以实现壁面打磨、耦合剂涂抹、超声检测和缺陷标记4个任务。

图14 缺陷检测试验Fig.14 Test of detect detection
打磨头和检测机构对壁面的压紧力采用增量式PID控制,控制算法如图15所示。
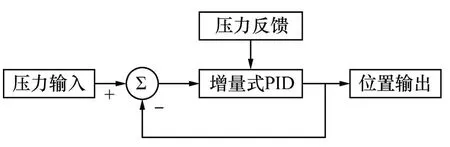
图15 增量式PID控制图Fig.15 Control chart of increment-PID
检测机构理想压紧力为10 N。打磨机构和检测机构的压力曲线如图16所示。由图16可见:使用PID控制后,打磨机构压力超调量减少了22.3%,达到稳态时间减少了27.8%,检测机构压力超调量减少了33.0%,达到稳态的时间减少了22.2%,可见PID控制对提高机器人的作业效率以及保护机器人稳定作业有显著效果。
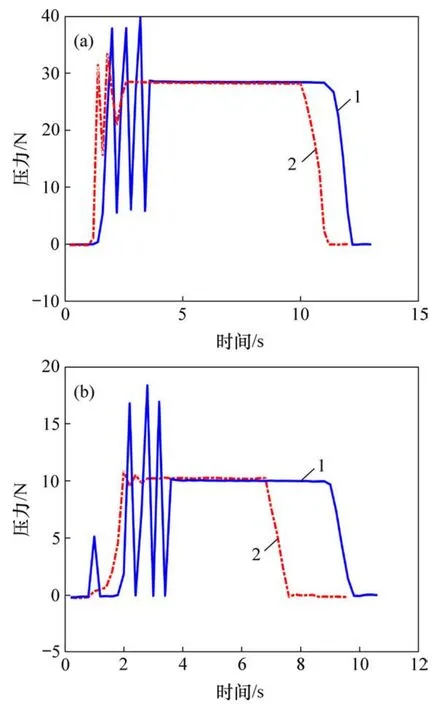
图16 压力曲线Fig.16 Pressure curves
4 结论
1)设计并实现了一种轮式磁吸附检测爬壁机器人,包括移动平台和检测机构,小型和无缆的移动平台增大了机器人的灵活性和工作空间,集成式的检测机构减小了机器人的尺寸和机构的控制难度。该机器人能在铁磁壁面上实现基本的运动功能,完成检测任务。
2)在横向、竖直和悬壁3种姿态下,机器人静止和运动时,其稳定的吸附力条件和电机扭矩条件为磁吸附爬壁机器人的设计提供了理论依据。
3)在铁磁壁面上进行了运动试验和缺陷检测试验,实现了基本的运动功能以及完整的超声检测作业,包括壁面打磨、耦合剂涂抹、超声检测和缺陷标记,证明提出的轮式磁吸附检测爬壁机器人具有可行性。
