基于车路协同技术的信号交叉口改进车辆跟驰模型
2020-01-16安树科徐良杰陈国俊罗浩顺
安树科 徐良杰 陈国俊 罗浩顺 曹 辉
(武汉理工大学交通学院,武汉 430070)
随着城市化和机动化的发展,交通拥堵已经成为阻碍我国城市发展的关键问题之一,极大地影响着人们的出行质量.改善信号交叉口的“停-走”式交通状况,是提高道路通行能力和服务质量的重要手段[1].许多交通信号优化模型,包括单点信号交叉口定时方法[2-5]和协同信号控制方法[6-8],在一定程度上增强了信号交叉口的通行能力并降低了停车延误.然而此类方法中车辆行驶速度是预先设定的,忽略了相邻交叉口距离、驾驶员特性、交通量等因素的影响,不能适应多变的交通流环境.
速度引导是提高信号交叉口通行能力并降低停车延误的有效方法.车路协同(vehicle infrastructure cooperation,VIC)系统可以根据当前的交通流状况和信号灯状态引导车辆的行驶轨迹[9].目前,已经开展了一些关于合作驾驶策略的研究,从宏观角度考虑了交叉口的延误、停车次数和排放等问题[10-12].但这些研究的重点是设计引导策略,并不能描述速度引导对车辆跟驰行为与交通流波动的影响.
事实上,信号交叉口的速度引导对车辆的跟驰行为有较大的影响.例如,车辆可以根据速度引导在红灯结束前预先减速或在绿灯结束前加速通过以清空交叉口[13].因而部分学者建立了单车速度引导模型[14-16],在一定程度上降低了车均延误,但是随着交通流饱和度的增大,其引导作用将趋于失效.Wu等[17]研究发现多车速度引导能够更为显著地降低停车次数和车均延误.此后,Tang等[18]和Zhao等[19]分析了速度引导策略对驾驶行为的影响,改进了跟驰模型的优化速度,进而提出了考虑信号相位的车辆跟驰模型,在一定程度上提高了当前绿灯相位的通行能力,但是对本周期不能通过交叉口的车辆引导效果并不明显,依然会产生大量的排队现象.龙科军等[20]在车速引导中考虑了车辆位置和信号灯状态之间的关系,但是未考虑速度引导过程中被引导车辆与周围车辆的协同关系,引导效果有待进一步验证.He等[21]提出的速度引导策略实现了车辆的不停驶通过交叉口,但是采用该方法时本周期绿灯相位通过率较低,且并未考虑信号交叉口的最低限速问题.
本文基于车路协同技术,提出一种实时考虑前方车辆运动状态和信号灯相位信息的多车协同引导车辆跟驰模型.另外,该模型还涉及了不同信号相位情况下被引导车辆的决策问题,以探索速度引导对跟驰行为的影响.
1 问题描述
当车辆进入信号交叉口附近区域,如果以当前速度继续行驶时,车辆可能会在信号交叉口停车线前经历红灯,被迫停车.由于缺乏对道路状况与信号灯状态信息的认知,驾驶员仅可以根据前后车辆的相对运动状态进行速度调节,因而可能导致车辆在绿灯结束时刻te后到达停车线,增加了信号交叉口的停车时间和排队延误.
如图1所示,当车辆进入信号交叉口速度引导区间L时,车路协同系统可以实时获取前方车辆和信号灯的状态信息,因而考虑信号灯相位与车辆可能面临的交通状态,制定了以下3个引导策略以实现车辆的路径规划:
1) 当车辆进入速度引导区间且信号相位为绿灯时,若该车辆能够在te前通过信号交叉口,则其在当前绿灯相位通过信号交叉口.
2) 当车辆进入速度引导区间,若该车辆即使采用路段最低限速行驶也将会经历停车,则其被引导减速停车,并在绿灯开始时刻tb后跟随其他车辆通过信号交叉口.
3) 当车辆进入速度引导区间,若该车辆不能在本周期绿灯相位通行,且其规划路径满足路段最低限速,则被引导不停驶通过信号交叉口.
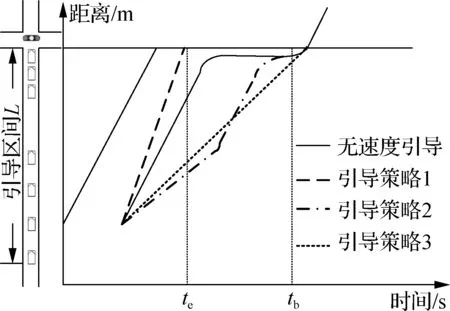
图1 信号交叉口速度引导策略
2 改进车辆跟驰模型
为了探讨速度引导策略对信号交叉口到达车辆跟驰行为的影响,需要改进现有的跟驰模型,假设所有车辆能够在单个信号周期内通过交叉口,每辆车的驾驶行为可分为以下4个部分.
1) 若车辆Cn在绿灯相位进入引导区间L,且采用最大速度能够在当前相位通过信号交叉口,即其满足以下公式时,则采用引导策略1:
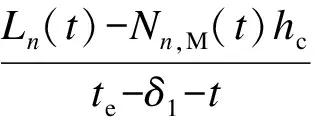
(1)
式中,Ln(t)为车辆Cn在t时刻与信号交叉口的距离;Nn,M(t)为t时刻车辆Cn前方的排队车辆数;hc为安全车头间距;δ1=hc/vn(t)为车辆的安全车头时距,其中vn(t)为车辆Cn在t时刻的速度;Vmax为最大速度.该方法可以确保车辆在绿灯结束前清除交叉路口而不是阻止跟随车辆.然而车辆在行驶过程中可能会受到其他车辆的制约,因此车辆运动行为可以表述为
(2)
式中,a1为车辆Cn采用引导策略1时的加速度;α为驾驶员敏感度系数;λ为反馈系数,若车辆Cn为首车,则λ=0;Δvn(t)=vn+1(t)-vn(t)为相邻车辆速度差.
2) 若车辆Cn不满足引导策略1的条件,此刻以路段最低限速亦不能通行,即其满足以下公式时,驾驶员将被预先通知车辆在该信号周期不能通过交叉口,此刻采用引导策略2:
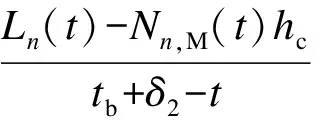
(3)
式中,δ2为排队清空时间;Vmin为路段最低限速.车辆将被引导平滑地减速至停止,以防止突然停车,车辆运动行为可以表述为
Nn,M(t)hc))-vn(t)]+λΔvn(t)
(4)
式中,a2为车辆Cn采用引导策略2时的加速度;β为引导速度裕量,Vmin+β用以描述即将排队停车的驾驶员所能接受最小跟驰速度;V(Ln(t)-Nn,M(t)hc)为车辆Cn采用引导策略2时的优化速度,计算公式为
Nn,M(t)hc-hc)+tanhhc]
(5)
3) 若车辆Cn不满足引导策略1的条件且其规划路径满足路段最低限速,即其满足以下公式时,可以采用引导策略3,在其前方排队车辆开始移动时到达队尾,进而消除了该车辆及其后方车辆的停车等待问题:
(6)
当车辆Cn为采用引导策略3的首车,即其满足
(7)
式中,Ln+1(t)为车辆Cn+1在t时刻与信号交叉口的距离;Nn+1,M(t)为t时刻车辆Cn+1前方的排队车辆数.此时车辆运动行为可以通过以下公式确定:

(8)
式中,a3为车辆Cn采用引导策略3且其是首车时的加速度.
当车辆Cn为采用引导策略3的非首车,即其满足以下公式时,为了降低系统负荷,车辆Cn不进行速度引导,采用传统车辆跟驰方法:
(9)
本文采用全速度差(full velocity difference, FVD)模型[22]描述此场景下的跟驰行为,即
(10)
式中,a4为车辆Cn采用引导策略3且其非首车时的加速度;Δxn(t)=xn+1(t)-xn(t)为车辆Cn与相邻前车Cn+1的跟驰间距,其中xn(t)为车辆Cn在t时刻的位置;V(Δxn(t))为车辆Cn在t时刻的优化速度,计算公式为
(11)
4) 若车辆Cn位于引导区间之外时,亦采用传统车辆跟驰方法,此时a4为车辆Cn在非引导区间的加速度.
综上所述,考虑不同信号灯相位状态,得到了改进车辆跟驰模型,其表达式如下:

(12)
Nn,M(t)hc))-vn(t)]+λΔvn(t)
(13)
(14)

(15)
3 数值仿真
本文基于Matlab软件,假设各车辆为可控的单体,将跟驰模型写入车辆控制规则,指导车辆的跟驰运动.仿真道路为无坡度的信号交叉口路段,路段长度为600 m,信号灯位于500 m处.信号周期设为60 s,其中前35 s为绿灯相位,仿真时长为80 s,仿真车辆数为8.参考文献[19, 22-23]给出了仿真实验中其他相关参数取值,如:仿真步长Δt=0.1 s,敏感度系数α=0.41 s-1,反馈系数λ=0.3 s-1,安全跟驰间距hc= 7.02 m,最低限速Vmin=5.00 m/s,最大速度Vmax=16.66 m/s,引导速度裕量β= 2 m/s.为了探讨速度引导对交通流的影响,引入经典的FVD模型作为对比实验.此外,Zhao等[19]研究的速度引导模型(记为ZSGCF模型)能够描述速度引导对驾驶员跟驰行为的影响,且实现了个体车辆的诱导,因而本文亦将其作为对比实验,验证改进车辆跟驰模型的有效性.车辆的初始位置及编号采用如下公式:
xn(0)=(n-1)ρn=1,2,…,N
(16)
式中,xn(0)为车辆Cn在0时刻的位置;ρ为车辆的初始密度;N为车辆总数.
仿真系统中各车辆的速度和位置可以分别由以下公式确定:
(17)
(18)
3.1 FVD模型与改进车辆跟驰模型
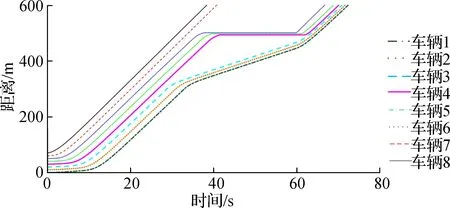
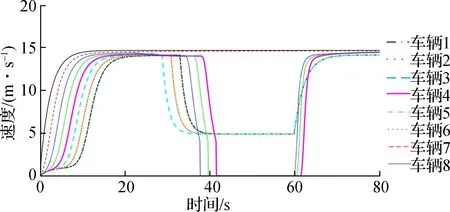
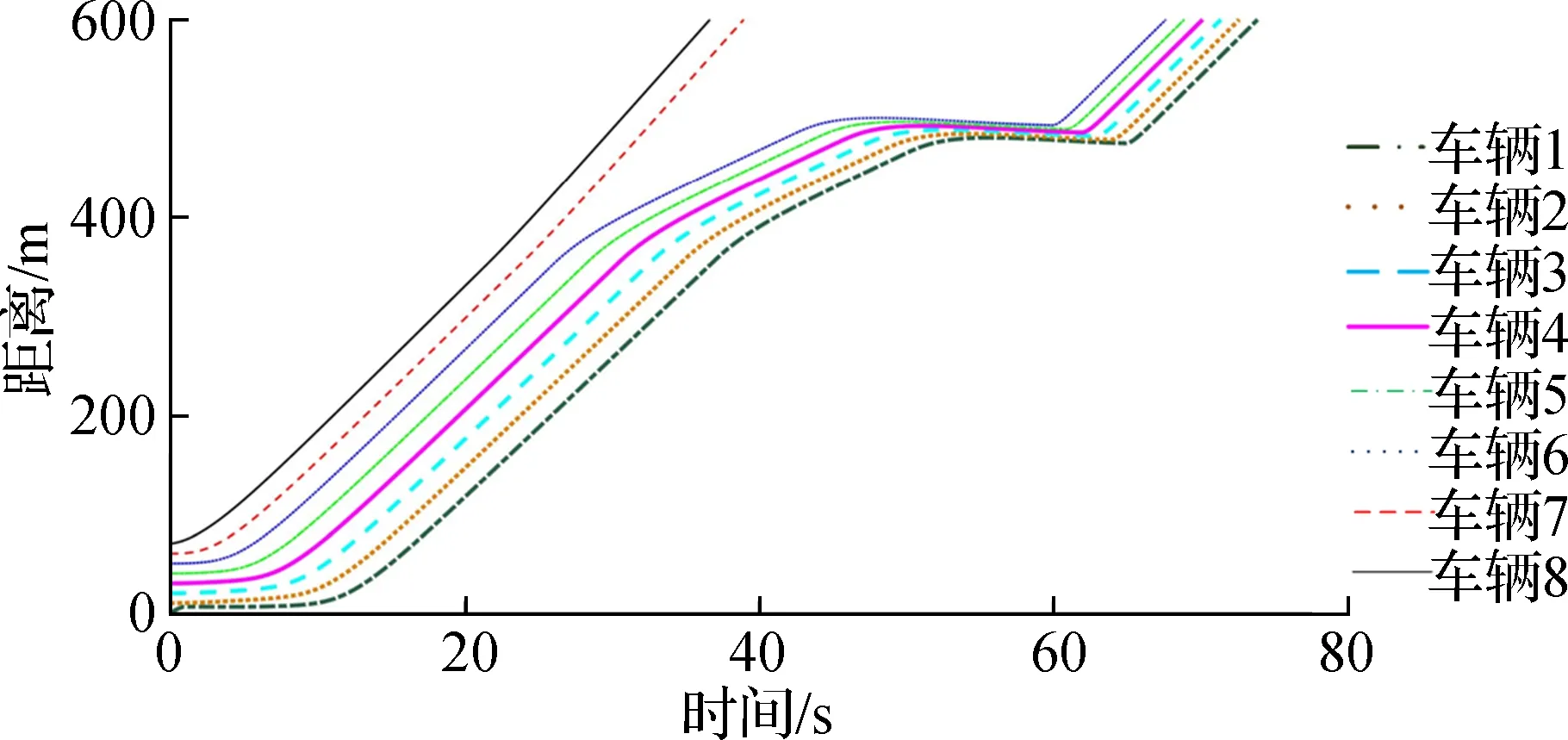
在上述仿真环境下,对比分析传统FVD模型和改进车辆跟驰模型的车辆路径轨迹及速度轨迹.路段初始密度为100 veh/km,各车辆初始速度为v1(0)=v2(0)=…=v8(0)=0,速度引导区间L=200 m.图2和图3分别给出了FVD模型和改进车辆跟驰模型的仿真结果.
对比图2(a)和图3(a)可以看出,在FVD模型中只有2辆车在第1个绿灯相位(0~35 s)内通过信号交叉口.与此同时,改进车辆跟驰模型中成功通过了3辆车,表明所提模型减少了该3辆车的行驶时间并提高了通行效率.另外,采用改进车辆跟驰模型实现了部分车辆在第2个绿灯相位(60~80 s)不停驶地通过交叉口,在一定程度上降低了停车延误.对比图2(b)和图3(b)可以看出,通过速度引导,降低了红灯相位导致的车辆减速或停止对交通流的大尺度扰动,且不停驶车辆均满足路段最低限速要求,提高了车辆速度稳定性.
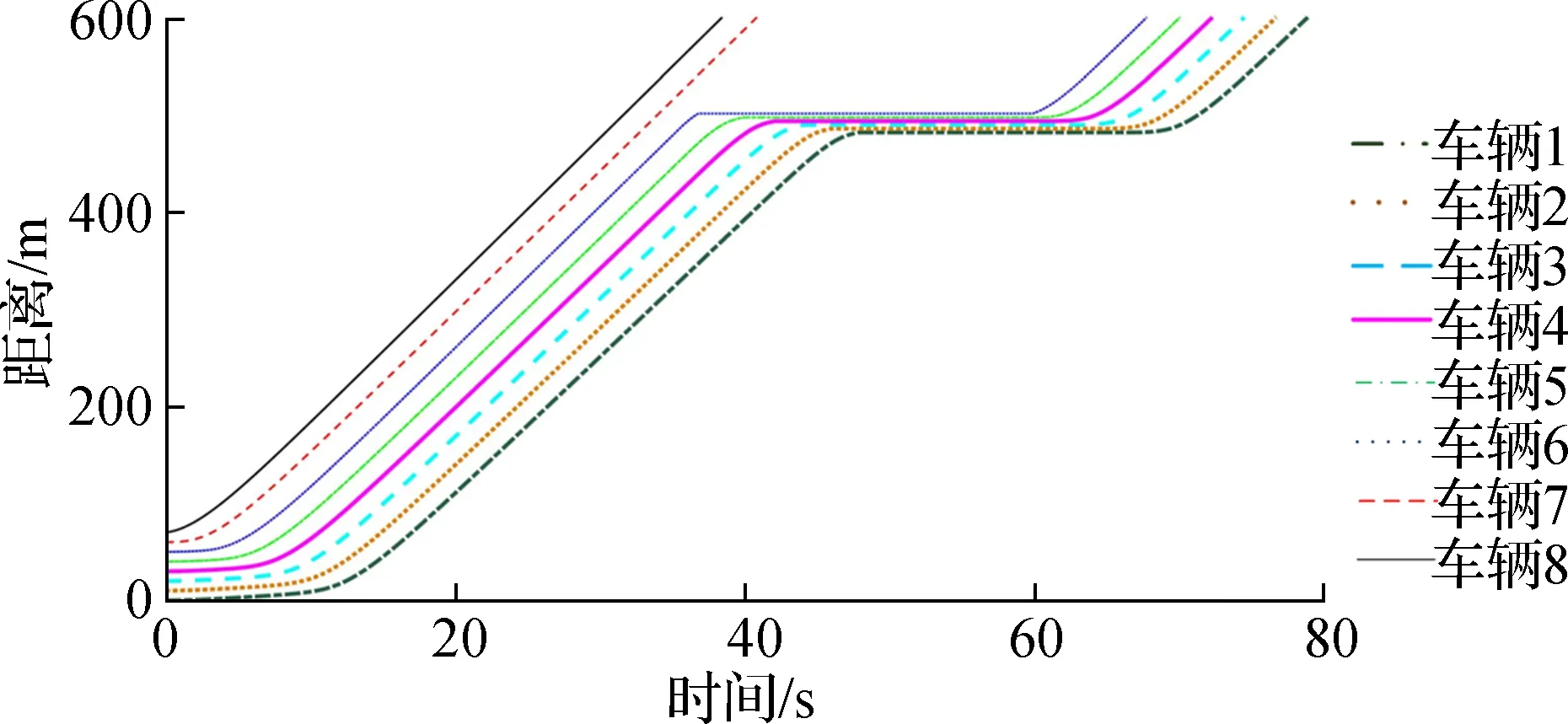
(a) 路径轨迹
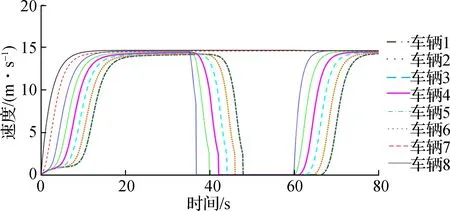
(b) 速度-时间图
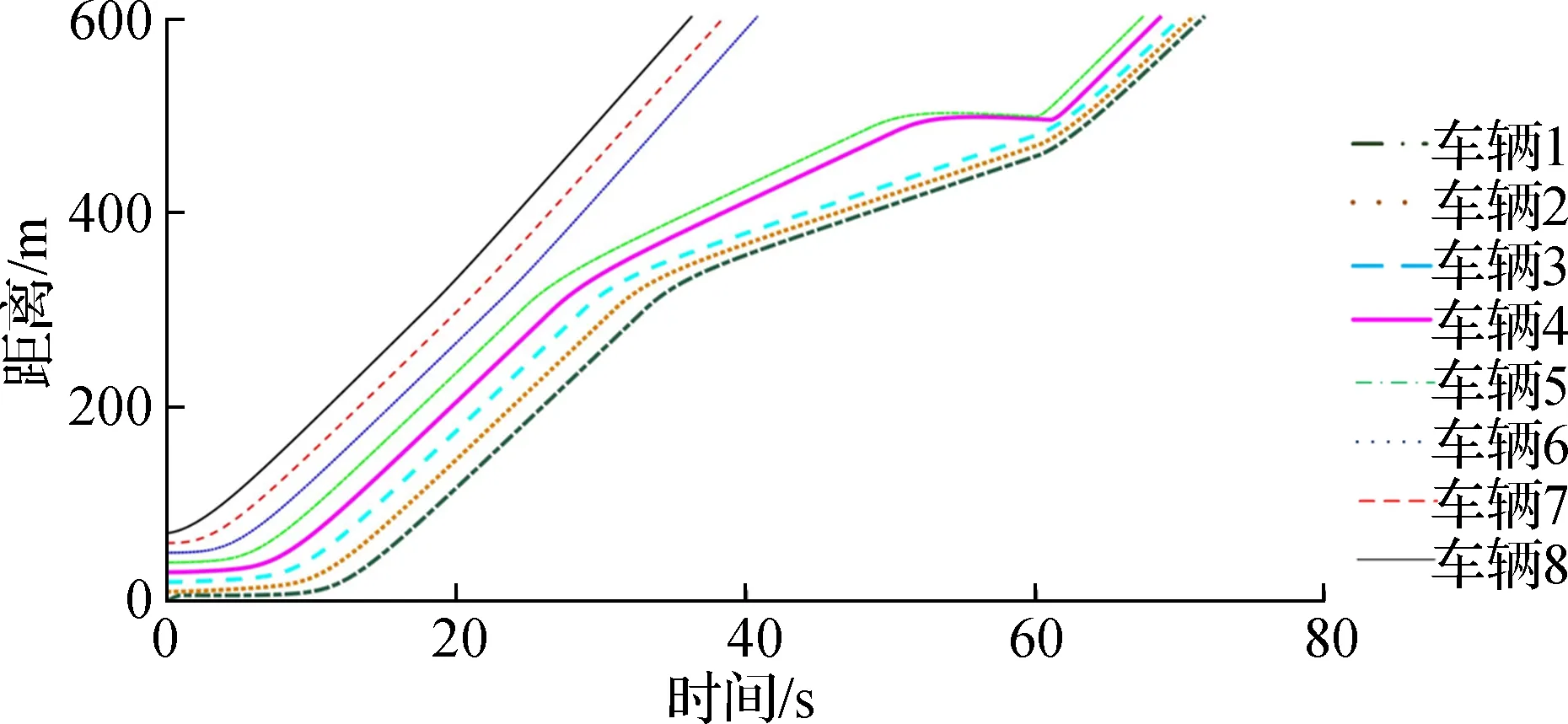
(a) 路径轨迹
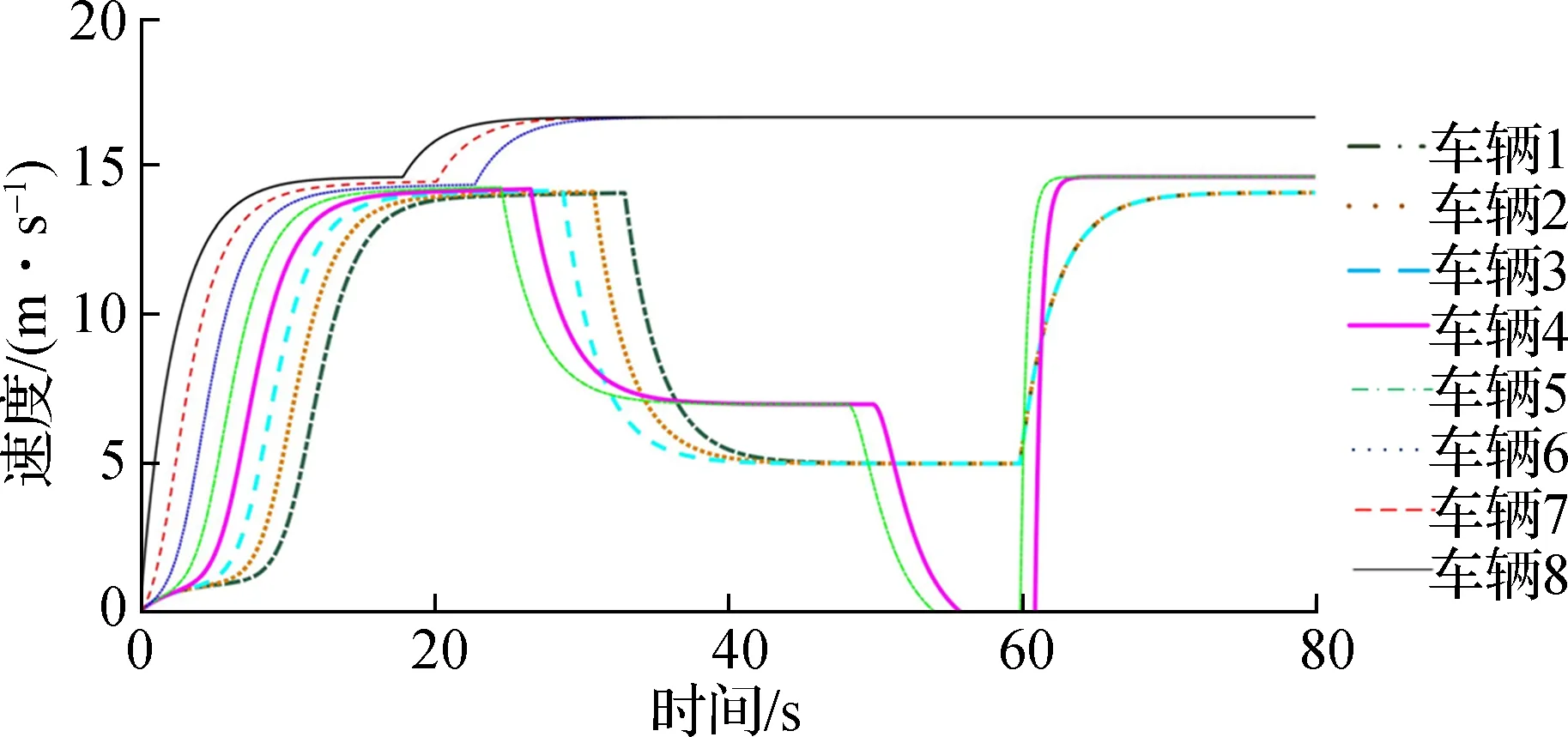
(b) 速度-时间图
3.2 ZSGCF模型与改进车辆跟驰模型
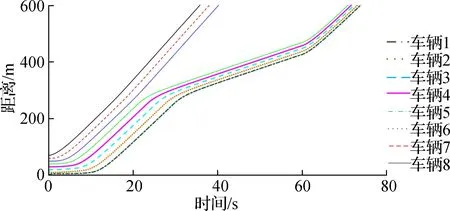
采用与3.1节相同的假设条件,图4给出了ZSGCF模型的路径轨迹和速度仿真结果.对比图3(a)和图4(a)可以发现,采用ZSGCF模型,车辆6未能在绿灯结束前通过交叉口,因而改进车辆跟驰模型更具优势.另外,相比于ZSGCF模型,改进车辆跟驰模型明显降低了车辆在信号交叉口的停车排队时间.对比图3(b)和图4(b)可以发现,改进车辆跟驰模型消除了排队车辆的速度突变,速度轨迹更为平滑,提高了驾驶舒适性.
(a) 路径轨迹
(b) 速度-时间图
3.3 引导区间长度影响
基于所提改进车辆跟驰模型,进一步仿真分析了引导区间长度的变化对速度引导的影响.调整引导区间L长度分别为250和150 m,各车辆的路径轨迹仿真结果如图5所示.对比图3(a)、图5(a)和图5(b)可以发现,随着引导区间长度的增加,更多的车辆可以在绿灯结束前通过信号交叉口,且不停驶通过交叉口的车辆也逐渐增多.因此,较大的引导区间长度有利于降低车辆平均停车延误并缓解停车排队现象,进而提高信号交叉口的通行能力.
(a) L=250 m
(b) L=150 m
4 结论
1) 相比于FVD模型和已有速度引导模型,所提改进车辆跟驰模型能够使更多的车辆在绿灯结束前快速通过交叉口,而其他车辆通过速度引导减速停车或跟随队尾车辆在红灯结束后不停驶通过交叉口,避免突然停车.
2) 所提改进车辆跟驰模型消除了排队车辆的速度突变,降低了车辆在信号交叉口的排队等待时间.
3) 随着引导区间长度的增加,速度引导效果逐渐增强,且能够缓解信号交叉口车辆停车排队现象.
4) 本文仅是针对固定信号相位情况下信号交叉口的速度引导研究,尚需在理论模型建立方面考虑可变信号相位及驾驶员的驾驶特性等因素,构建更加符合实际情况的信号交叉口车辆跟驰模型.