船舶操纵运动仿真研究
2020-01-16陆冬青邱云明
陆冬青,邱云明
(陆军军事交通学院 镇江校区,江苏 镇江 212003)
0 引言
船舶操纵运动仿真广泛应用于航海教育培训、船舶设计阶段的操纵性预报以及港口与航道工程的设计方案论证。刘畅等[1]以MMG操纵性数学模型为基础,采用Open GL作为图形处理和三维仿真的技术基础,以某型船舶为对象进行了旋回运动仿真,但是没有给出具体的实现途径和效果。孙畅等[2]从舵机操纵模型、船舶操纵系统的动力学模型、船舶操纵控制算法等三个方面进行建模,利用Visual C++ 编程对系统模型进行仿真,通过局域网下实时传递的数据实现舵机的模拟操纵和船舶航迹的实时显示。张淋等[3]利用深水平面MMG船舶操纵运动数学模型,通过浅水修正和岸壁效应近似建立了船舶在浅狭航道中操纵运动数学模型,针对Mariner船开展了浅狭航道中的操纵运动预报,探讨了直航状态下浅水及岸壁效应对船舶运动轨迹和航向的影响,仿真结果能够为船舶在浅狭航道中的操纵与控制提供参考。陈宁等[4]建立了风、流共同作用下船舶操纵系统的动力学数学模型,根据某船型的主机参数和船形尺寸参数,利用Matlab/Simulink模拟了船舶旋回性试验和风、流共同作用下对旋回性的影响试验。付卫华[5]建立了浅水域船舶运动数学模型,利用Matlab软件进行了船舶的旋回性能试验和Z形试验。黄蓉蓉等[6]为设计优良的操纵运动控制系统,利用Matlab对基于MMG标准方法的船舶四自由度运动方程进行建模,并针对某集装箱船开展回转操纵运动仿真。综上,相关文献对船舶操纵运动仿真进行了较为深入的研究,部分文章还进行了船舶的旋回性能试验和Z形试验仿真,但是都没有进行船舶的变速性能试验,并且船舶操纵运动的三维数值仿真研究不够深入。本文建立了船舶操纵运动数学模型,运用unity开发工具,编制了船舶操纵运动三维数值仿真程序,进行了船舶变速性能、旋回性能和Z形实验等较为完整的船舶操纵性能数值仿真试验。
1 船舶操纵运动数学模型
如图1建立船舶操纵运动坐标系,包括空间固定坐标系o0x0y0z0和随船运动坐标系oxyz。图中,o0为地球上某一固定点,一般取船舶运动的初始位置;o0x0轴指向真北方向;o0y0轴指向真东方向;o0x0y0与水平面平行;o0z0轴竖直向下指向地心;o为船舶重心;ox轴指向船首;oy轴指向右舷;oxy与水平面平行;oz轴竖直向下指向地心;V为船速;φ为航向角;u、v为船速沿着ox轴和oy轴的速度分量;r为转首角速度(绕oz轴转动)。四自由度船舶操纵运动数学模型如下:
(1)

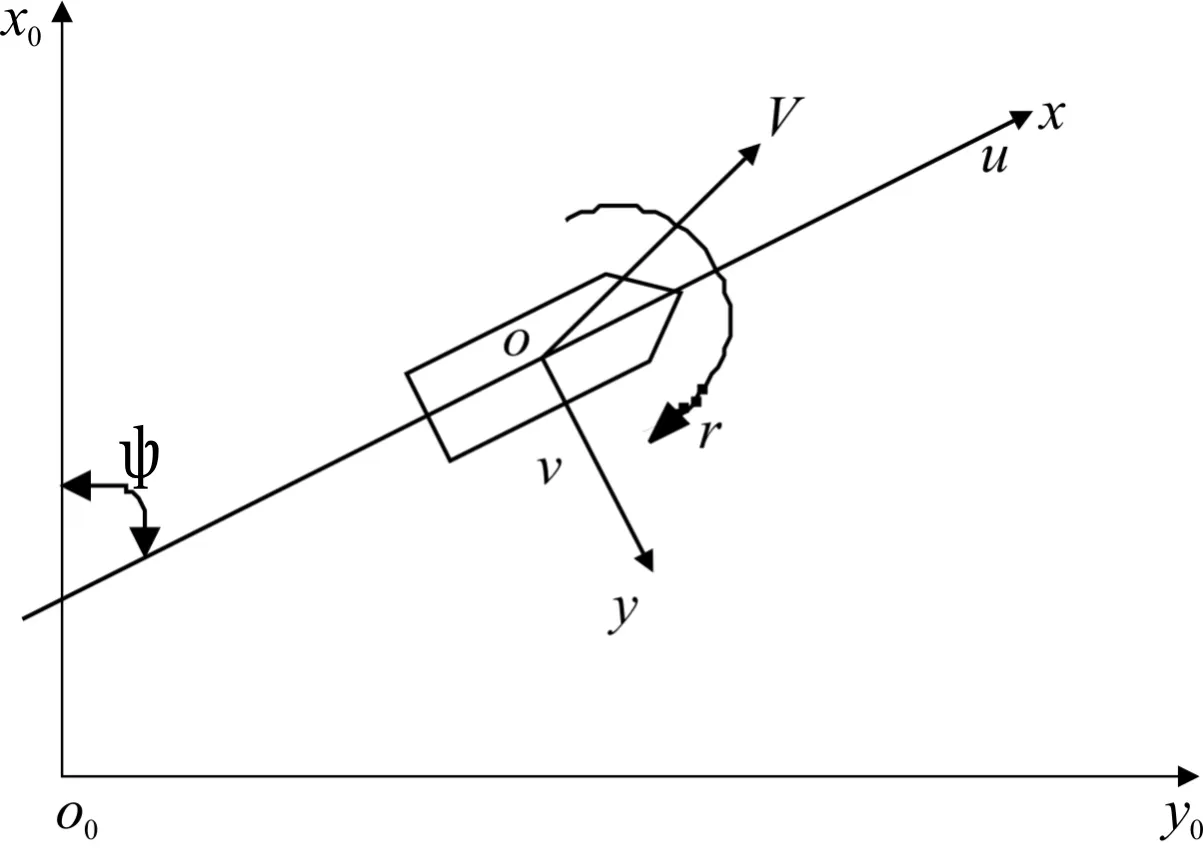
图1 船舶操纵运动仿真程序界面
水流的粘性作用力和力矩根据下式计算:
(2)
式中:X(u)为船舶的直航阻力;Xvv、Xvr和Xrr为纵向流体动力导数;Yv、Yr、Nv和Nr为线性流体动力导数;Yvv、Yrr、Nrr、Nvrr和Nrr为非线性流体动力导数,这些流体动力导数的计算方法见文献[7];zH为水阻尼力作用中心的oz轴坐标。
螺旋桨的作用力和力矩根据下式计算:
(3)
式中:tp为推力减额系数;n为螺旋桨转速;DP为螺旋桨直径;kT为螺旋桨敞水推力系数;JS=up/(nDP),为进速系数(uP为螺旋桨所在位置的纵向速度);Ai和Bi为系数,根据船舶的方形系数CB和吃水船d/LPP求取[8];zP为桨轴中心的oz轴坐标。
舵的作用力和力矩根据下式计算:
(4)
式中:tR为舵阻力减额系数;FN为舵的正压力;αH为修正因子[5];δ为舵角;xR、zR分别为舵力作用中心的ox轴、oz轴坐标。
风的作用力和力矩根据下式计算:
(5)
式中:ρA为空气密度;Af为船舶水线以上的正投影面积;As为船舶水线以上的侧投影面积;LOA为船舶总长度;UR为相对风速;αR为相对风舷角;Cwx(αR)、Cwy(αR)、Cwn(αR)为风压力(矩)系数[7];zW为风压力作用中心的oz轴坐标。
2 编程实现和船舶操纵性试验数值仿真
2.1 编程实现
unity是一款用于设计三维游戏、漫游、虚拟现实、三维动画的专业游戏开发引擎,包含了图形编辑器、着色器、脚本编辑器、网络、物理效果等特性,并将其集成为专业的游戏开发包,利用交互的图形化开发环境,采用 “面向对象”的编辑界面,操作方便。大部分的开发都可以在可视化的界面中完成,无需编写实际代码,只要在设计界面中执行一些赋值操作就可以了。该软件支持主流的三维文件格式,用户在Maya、3DS Max、Cinema 4D、Cheetah 3D或Blender中导出文件到unity中,同样无需编写任何代码即可使用三维模型。
本文运用unity进行程序开发,通过导入船舶三维模型,添加天空、地形以及水面,根据船舶操纵运动模型以及作用于船体上的作用力(矩)计算公式,结合某型船舶的数据(见表1),编写脚本文件。船舶操纵运动三维数值仿真程序界面见图2。
2.2 船舶操纵性试验数值仿真
船舶变速性能包括启动性能、停车性能和倒车性能。本文进行了船舶停车性能和倒车性能试验。
船舶停车性能试验数值仿真的部分计算结果见图3、图4。两图分别为全速前进至停车的船速随时间变化曲线、滑行距离随时间变化曲线,其中实线为本文的数据,虚线为根据文献[9]计算得到的结果,两根曲线吻合较好。根据文献[9]计算的停车冲程为1 137 m,本文的计算结果为1 202 m,相对误差为5.7%,在允许范围之内。
船舶倒车性能试验数值仿真冲时为83 s、冲程为258 m。根据文献[9]计算得到的冲时为88 s、冲程为253 m。两者相对误差分别为5.7%和2.0%,在允许范围之内。
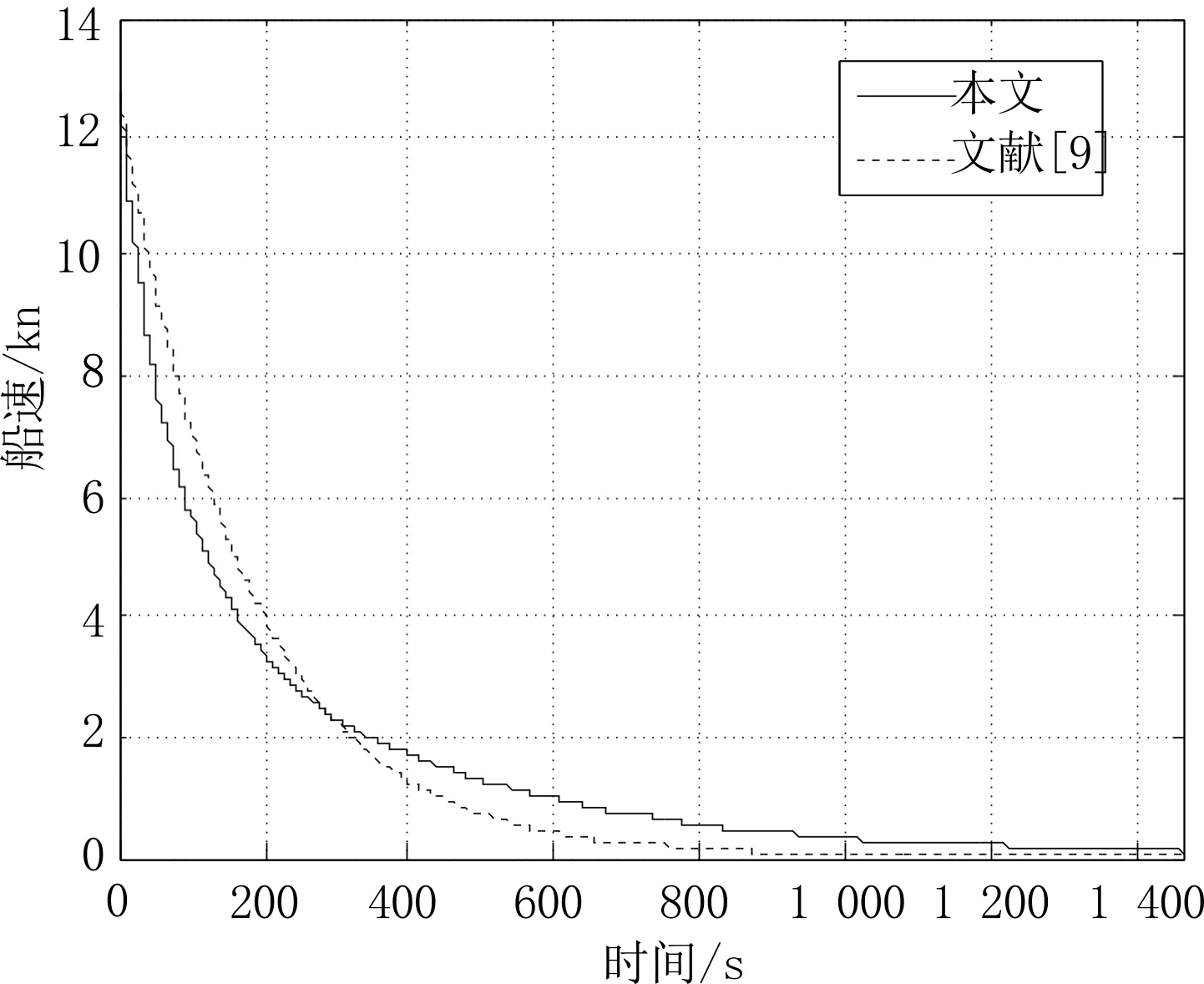
图3 船速随时间变化曲线
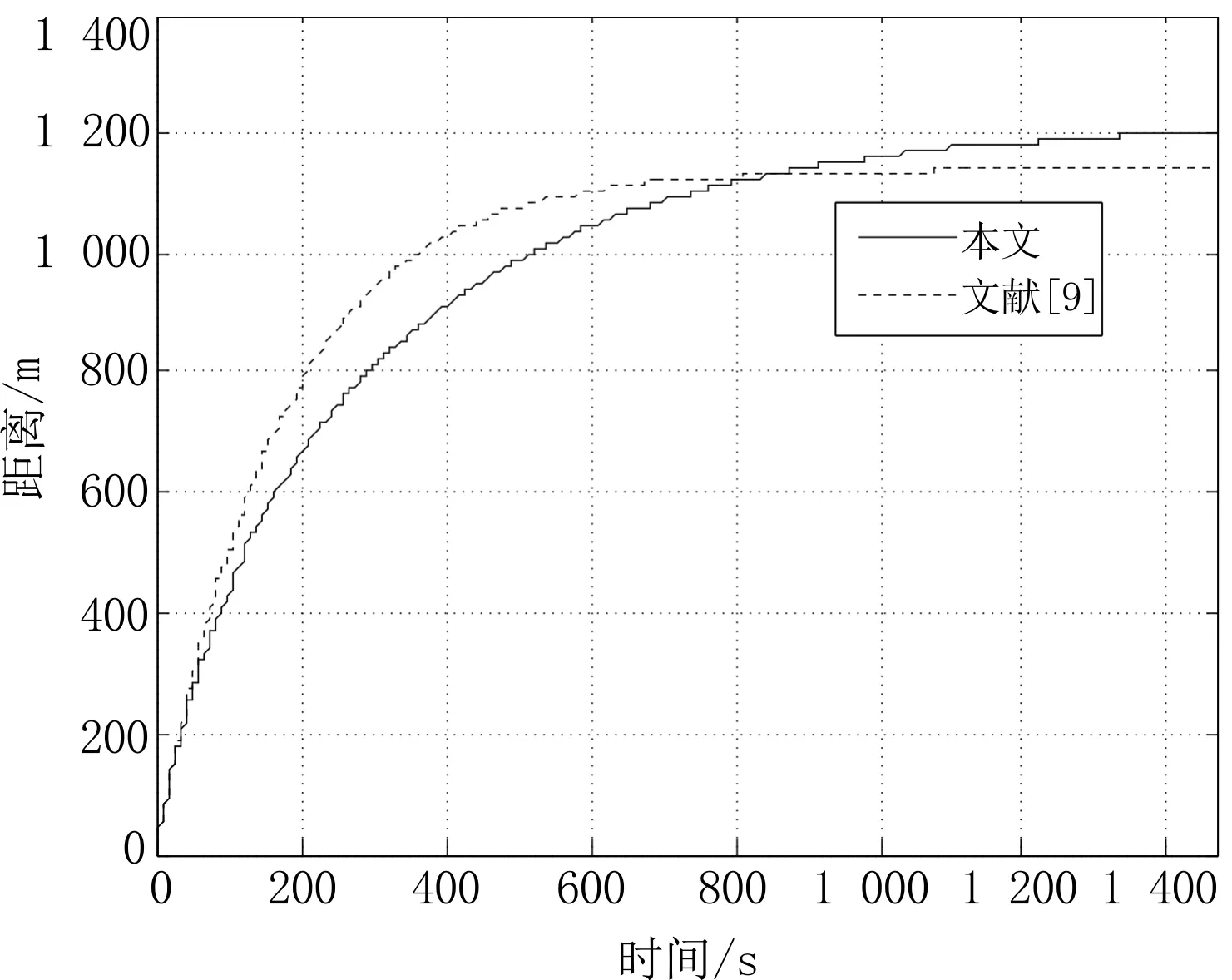
图4 滑行距离随时间变化曲线
船舶旋回性性能试验数值仿真的旋回圈见图5,仿真试验的旋回初径为4.2倍船长。该船实船试验的旋回初径为4倍船长,两者基本吻合。
10°/10°Z形试验数值仿真结果见图6。通过试验得到了第一惯性超越角和第二惯性超越角分别为6.1°、7.4°,都在容许界限值之内,符合国际海事组织(IMO)通过的船舶操纵性标准;根据图中的曲线计算得到无因次化的船舶旋回性指数K′=1.00、无因次化的船舶追随性指数T′=1.28,和文献[10]提供的数据进行比对,处于合理范围。
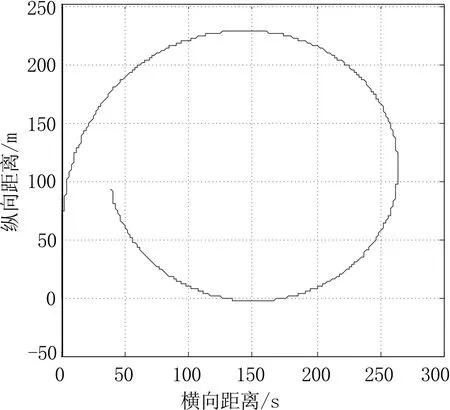
图5 倒车性能试验数值仿真—船速随时间变化曲线
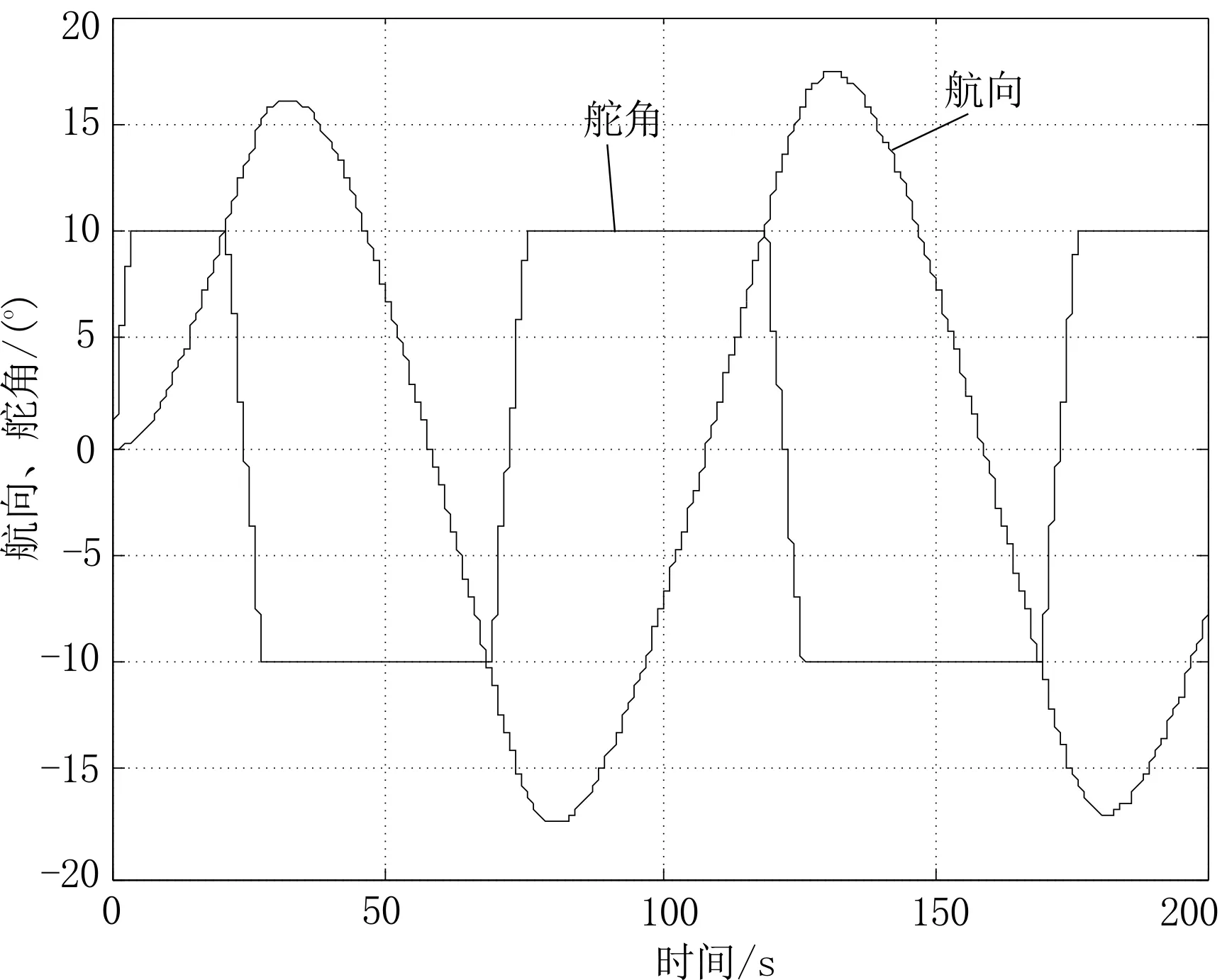
图6 倒车性能试验数值仿真—前冲距离随时间变化曲线
3 结论
(1)本文运用unity进行程序开发,通过导入船舶三维模型,添加天空、地形以及水面,根据四自由度船舶操纵运动数学模型以及作用于船体的作用力(矩)计算公式,结合某型船舶的数据,编写脚本文件,方便快捷地编制完成了船舶操纵运动三维数值仿真程序。
(2)本文进行了船舶停车性能、倒车性能、旋回性能和Z形实验等较为完整的船舶操纵性能数值仿真试验,得到了试验数据,并和该船的实船试验数据以及相关文献的计算数据进行比对,吻合较好,误差在允许范围,表明本文的船舶操纵运动数学模型以及相关的计算公式是可行的,计算结果是可信的。