基于目标跟踪的变电站隔离开关状态图像识别方法
2020-01-15,,
,,
(1.贵州电网有限责任公司六盘水供电局,贵州 六盘水 553000; 2.中国矿业大学电气与动力工程学院,江苏 徐州 221116)
0 引言
隔离开关作为变电站的重要设备,其状态的自动识别对于电网智能化设备状态巡视、设备告警联动等电网生产运行监控具有重要意义。现有隔离开关的辅助开关定位功能都是基于机械原理。在机械出现磨损时,这种定位将会导致较大的偏差,从而致使对开关的分合状态判断失误。视频监控技术已广泛应用于变电站的监控。传统的视频监控技术只是将变电站的远程视频传输到监控室,通过人工查看并确认每个设备的状态,对于隔离开关的状态识别效率低下,这极大地增加了运维人员的工作量。因此,如何实现对变电站隔离开关状态的有效自动识别,成为提高变电站视频监控的智能化水平和变电站运维效率和安全的关键。
利用隔离开关的具体图像特征,石延辉等[1]通过提取检测开关的形状参数来确定隔离开关的状态 。张浩等[2]提出了一种模板匹配方法,通过取隔行隔列数据进行粗匹配,然后通过相关系数法等对设备状态进行识别。陈安伟等[3]通过尺度不变特征变换、霍夫变换对隔离开关位置状态信息进行标准建模,实现对开关状态的自动识别。邵剑雄等[4]训练“开”和“合”2种状态模型,通过检测和定位来判断开关的状态。但是,这些方法均基于静态图像进行处理,在对开关状态检测与定位时,存在稳定性差、鲁棒性不强等问题。
在此,将隔离开关开合过程的动态视频作为研究对象,通过目标跟踪技术实时跟踪开关运行动态轨迹,进而计算闸刀间的像素距离来实时监测开关的分合状态。
1 基于lasso正则化稀疏表示的目标跟踪模型
1.1 目标状态的观测模型
令目标(隔离开关)的状态变量为bt=[x,y,w,h], 其中(x,y)为跟踪框的中心坐标;w为跟踪框的宽;h为跟踪框的高。若前t-1帧观察图像块为I1∶t-1=[I1,I2,…,It-1],则第t帧目标状态遵循下列分布[4-6]:
(1)
当给定第t帧图像块时,估计目标的状态为
(2)
p(It|bt)为观测模型,表示候选目标可能的状态。
1.2 lasso正则化稀疏表示的目标跟踪模型
若目标模板集H={h1,h2,…,hn}∈d×n,则候选目标x∈d×1可表示为模板的线性组合,即x≈Hs=s1h1+s2h2+…+snhn,其中s=[s1,s2,…,sn]T∈n表示系数。实际中,候选目标可以由目标模板中少数模板线性表示,即可稀疏表示为
(3)

由于概率p(It|bt)难以计算,可利用评价函数F(x)逼近p(It|bt),通过评价函数可以确定候选目标是否为真正的跟踪结果。令H={h1,h2,…,hn}∈d×n为目标模板集,第t帧中的候选目标为x,则定义F(x)为x与所有模板内积和的平均值:
(4)

hi=Aiωi
(5)

hi≈Aiωis.t. ‖ωi‖0≤α
(6)
α为稀疏水平参数。将式(6)代入式(4)得到
(7)

(8)

2 隔离开关分合状态判断
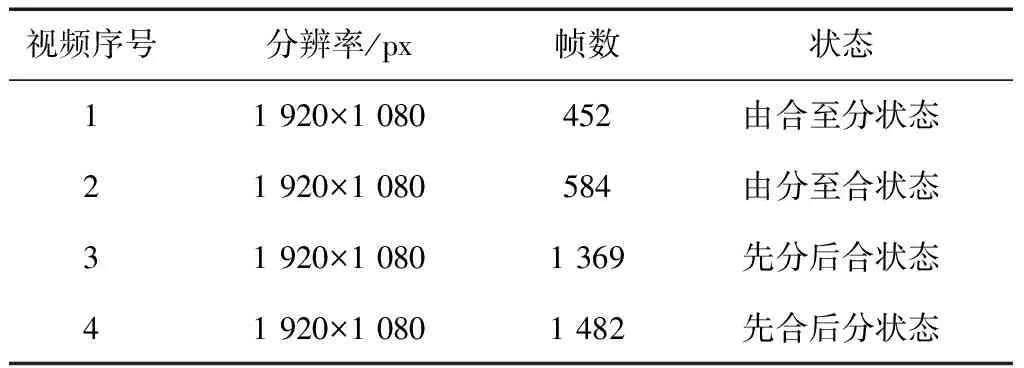
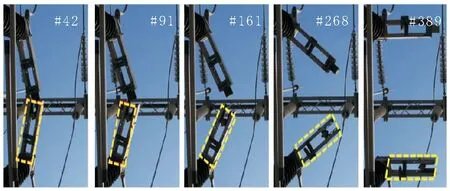
将摄像头安装在开关正下方2块闸刀的中间位置。如图1所示,取闸刀间的中轴线为基准线(横向虚线),并选定实时跟踪点位置(竖向实线顶端的圆点)。假设跟踪点到虚线的距离为s;s0和s1分别为阈值;st和st+t0分别为第t帧和第t+t0帧跟踪点与基准线的距离。可依据以下规则对隔离开关状态进行判断:s>s0,隔离开关处于开状态;s 图1 隔离开关开合状态的实时跟踪 实测中采集了4段不同状态下隔离开关的视频和对应的隔离开关状态,如表1所示。 表1 不同状态下隔离开关的视频 隔离开关由合到分过程的跟踪结果如图2所示。由图2中第42帧、第91帧、第161帧的跟踪结果显示:在有遮挡情况下本文方法仍能较好地跟踪闸刀的位置;第268帧和第389帧的跟踪结果表明在旋转尺度较大时,本文方法亦能给出很好的跟踪结果。隔离开关由分至合过程中关键帧的跟踪结果如图3所示。 注:图中数字为摄像头采集到隔离开关的图像帧数序号 注:图中数字为摄像头采集到隔离开关的图像帧数序号 由图3可知,由分至合的过程时,本文方法同样可准确地对目标进行跟踪。 实测中选择2个闸刀的中线作为参考基线,闸刀的中心作为参考跟踪点。在对闸刀的位置跟踪时,实时计算参考跟踪点与参考基线的距离(相差的像素点数),距离逐渐变大时,说明开关处于由合至开的过程;反之当距离逐渐变小时,则说明开关处于由开至合的过程。隔离开关由合至分过程中参考跟踪点与参考基线距离(像素点数)的变化曲线如图4所示,通过与设定的闭合参考基线8和开启参考基线30阈值进行比较,当距离超出8个像素可认为开关开始打开,当超出30个像素时,则可认为开关处于完全打开状态,实际应用中这2个参数可根据实际情况进行调整。 隔离开关由合至开的过程中参考跟踪点和参考基准线(闭合和开启参考基线分别为8和18)的距离变化曲线如图5所示。 图4 隔离开关由合至分过程中参考跟踪点与参考基线距离(像素点数)的变化曲线 图5 隔离开关由分至合过程中参考跟踪点与参考基线距离(像素点数)的变化曲线 距离呈现由小变大过程。这个过程正好对应隔离开关由合至开过程,同样可利用设定的阈值得出开关的状态。由图5可以看出:在开始0~160 帧的范围内,距离曲线抖动比较大,但基本在7个像素距离附近波动,说明此时开关处于由合至开的开启阶段,且未完全开启;在接下来的200~400 帧表明距离迅速增大,这个过程对应开关的开启阶段;400 帧以后距离基本处于稳定状态,则说明开关处于停顿状态;当视频到1 000 帧时,距离开始迅速变小,则说明开关开始由分至合;最后到达1 200 帧时,距离基本处于稳定状态,则说明开关合的过程完毕,处于完全闭合状态。 给出了基于闸刀运动跟踪的隔离开关自动图像识别方法。利用Lasso约束的稀疏表示闸刀跟踪模型,提高了跟踪的准确性,并给出了闸刀状态和闸刀运动状态识别方案。实测结果表明,本文方法对开关状态识别具有准确率高、鲁棒性好的优点,有较广泛的实际工程应用价值。
3 实测结果和分析
3.1 开关运行动态轨迹的跟踪

3.2 开关状态的识别


4 结束语