火龙果种植信息提取技术
2020-01-14许元红陈智虎刘春艳童倩倩李莉婕赵泽英
许元红,陈智虎,刘春艳,童倩倩,李莉婕,赵泽英
(贵州省农业科学院 科技信息研究所,贵州 贵阳 550006)
火龙果属于热带、亚热带水果,营养丰富,集水果、花卉、蔬菜、保健为一体,具有非常高的经济价值[1]。近年来,贵州省火龙果种植面积不断增加,如何快速提取种植信息,实现产量估测、进行田间精准管理显得十分重要。单位面积内植株数量与植株倒伏数量作为火龙果生长监测的重要指标,是进行种植调控与管理不可或缺的参考因素。因此,准确、快速获取火龙果株数及倒伏信息对其实现精细化管理具有重要意义。植物田间株数及倒伏情况的监测可采取基于数字影像的目视解译法和自动提取法,目视解译法主要基于可见光影像人工解译出实际所需的农情信息,该方法效率低,很难实现快速、精准管理的目的。自动提取主要利用反射光谱、倾斜摄影、激光雷达等技术实现田间株数、株高及倒伏信息等指标的获取。刘帅兵等[2]利用无人机可见光影像,通过骨架提取算法及多次去毛刺处理等数学形态学流程提取玉米苗形态,实现玉米苗期株数的信息提取,总体识别精度达97.8%;苏伟等[3]利用地基激光雷达获取毫米级精度的玉米个体植株三维点云数据并进行海量点云数据预处理,试验结果与实地手动测量值相比,真实叶面积、叶长、株高、叶倾角的平均绝对百分比误差(MAPE)分别为 2.38%、1.32%、0.61%和 8.96%,精度较高,可操作性强; MALAMBO等[4]使用小型无人机通过倾斜摄影方式,提取玉米倒伏信息,并在小区尺度上与田间调查结果进行对比分析,误差仅4.44%。当前,准确并快速地提取火龙果种植信息鲜有研究,鉴于此,选取关岭县板贵乡木工村火龙种植基地为研究区,采用纵横CW-007垂直起降无人机系统搭载可见光数码相机获取的研究区高清影像作为数据源,利用Pix4D进行影像拼接,通过ENVI软件提取研究区内火龙果株数,借助ArcGIS进行株高提取,统计火龙果田间倒伏株数,并与实地采集信息进行对比,以论证基于低空遥感技术快速提取火龙果种植信息的可行性,旨在寻求准确、快速获取火龙果生长期田间植株数量与倒伏数量的技术手段,为大田作物的科学估测产量及种植区精细化管理提供技术支撑。
1 材料与方法
1.1 研究区概况
研究区位于关岭自治县板贵乡木工村,地理坐标为北纬25°39′01″、东经105°42′36″。地处低热河谷,气候为中亚热带季风湿润气候,主要地貌有中山及峰丛洼地等,岩溶地貌发育,石漠化较严重,平均海拔650 m,年平均气温20℃左右,年日照时数3 000 h左右,年降水量890 mm左右,无霜期大于320 d。研究区域种植的主要作物有玉米、花椒及火龙果。
1.2 试验材料
1.2.1 火龙果样地 为了创造有利的试验条件,选择的火龙果种植区地势较为平整,行间距约3 m,株间距约2 m,总面积1 712 m2。火龙果种植于2013年,长势良好,种植区管理规范。
1.2.2 低空遥感系统 目前低空遥感主要利用固定翼和多旋翼等手段进行数据获取。研究借助纵横系列CW-007无人机进行火龙果种植区域拍摄。系统由飞行平台、机载传感器、地面控制系统、数据链路、数据后处理系统组成。无人机采用模块化设计,抗风能力强,续航时间可达50 min;机载传感器为SONY A7R可见光相机,全画幅,像素7 952×5 304,像素尺寸0.004 515 mm,相机焦距35.373 097 mm。
1.3 试验方法
基于低空遥感技术获取火龙果种植信息的技术流程详见图1。
1.3.1 影像获取 为获取高质量影像数据,航拍前需作好充分准备工作,包括测区资料收集,航线规划,起降场地选择等[5]。研究数据获取时间为2019年4月12日,天气晴朗,于太阳辐射较稳定的正午时分进行拍摄。为便于后期制作高分辨率数字产品,飞行行向重叠度设为80%,旁向重叠度设为70%,地面分辨率1.58 cm,相对地面航高122 m,东西方向共6条航线,采集照片共计109张,对应姿态数据(POS)109个。
1.3.2 地面像控点GCP获取 虽然无人机系统带有惯性测量单元(IMU),但要获得高精度数字产品,必须采用实时动态差分技术(RTK)测量地面像控点参与后期影像处理。地面像控点要求均匀分布于研究区域,为满足处理需求,共测量像控点8个。
1.3.3 火龙果株高量测 为验证基于遥感技术提取火龙果倒伏植株的准确率,对火龙果正常生长高度及倒伏火龙果的实际高度进行实地测量。该时期火龙果长势良好,枝叶处于生长阶段,暂未进行修剪。利用钢卷尺从地面量至火龙果新芽顶端,共获得101株正常火龙果的植株高度,均在1 m以上;倒伏植株共测量5株,新芽顶距地面距离在0.43~0.75 m。
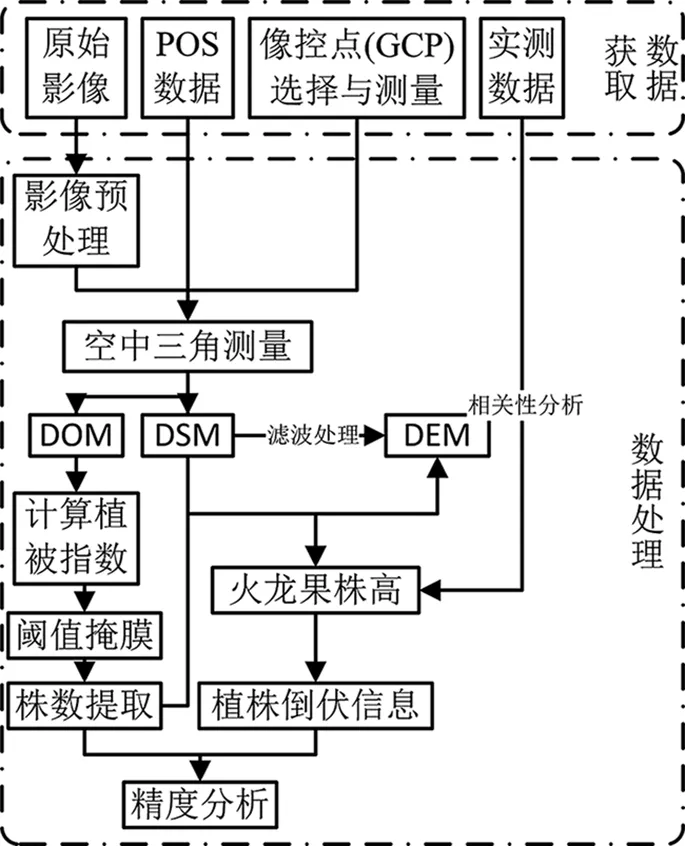
图1 低空遥感技术获取火龙果种植信息的技术流程
Fig.1 The technical process of obtaining pitaya planting information by using low-altitude remote sensing technology
1.3.4 数据处理
1) 影像预处理。进行影像获取时,随着时间推移,太阳位置、风速等因素均会发生变化,造成所获取影像存在不同程度的辐射误差。为提高后期数据制作精度,必须进行影像增强处理,确保所有照片明暗程度基本相似。
2) 正射影像(DOM)、数字表面模型(DSM)和数字高程模型(DEM)制作。采用Pix4D进行相关数字产品的制作。将经过预处理的数码像片和POS数据导入软件,选择对应的坐标系和基准面进行初始化处理;导入GCP,校正图片地理参考,提高处理结果精度。重新进行空中三角测量,获得研究区的数字正射影像DOM以及数字表面模型DSM,DSM包含地面上的所有植被信息,对其进行滤波处理之后获得研究区域的数字高程模型DEM。
1.3.5 种植株数与倒伏株数信息提取
1) 种植株数。以拼接完成的三波段正射影像DOM为基础数据,利用ENVI5.5软件计算研究区可见光波段差异植被指数VDVI,计算后实现目标地物与背景值的较好分离。通过对可见光波段差异植被指数计算结果进行密度分割,确定作物分布的最大及最小阈值,借助Raster Color Slice工具分析,得出火龙果与背景值的最佳分割阈值为0.04。采用波段运算工具对植被指数进行掩膜处理,将大于等于0.04的像元值保持不变,小于0.04的像元值更改为0值。利用果树提取工具Count Crops,按照“作物最小直径1.1 m、最大直径2 m、增量数3、高斯平滑因子0.5及允许重叠百分比为0”的条件对研究区内火龙果植株数量进行提取,并将提取结果转换为矢量,统计出研究区火龙果株数,通过对比目视解译数据(等同于田间实际株数),进行精度R验证。
(1)
(2)
式中,Red代表红光波段,Green表代表绿光波段,Blue代表蓝光波段;M提取值代表利用软件统计出的株数,N解译值代表目视解译的株数。
2) 倒伏株数。DSM与DEM的每个像素值均表示该点高程,可用于高度测量。要得出倒伏株数,必须先提取出研究区内所有单株火龙果的植株高度(H),可利用单株火龙果覆盖区域的DSM与DEM进行作差运算得到。首先论证基于低空遥感技术提取火龙果株高的可行性,将提取值和实测值进行相关性分析,以决定系数R2和均方根误差RMSE作为评价估算模型的指标,R2越大,与之对应的RMSE就越小,相关性就越高[6-7]。利用ArcGIS中“以表格显示分区统计”工具提取出单株火龙果覆盖区域内的高程最大值以及地表高程平均值,将两者作差运算得到火龙果植株高度,统计得出研究区内植株高度最大值为1.62 m,最小值为0.28 m;实地测量正常生长的火龙果植株所攀附的支架离地高度约为1.08 m,因此以1.08 m作为分界点,结合地面实测倒伏植株的最大高度统计获得倒伏火龙果株数,最后进行精度验证。
(3)
(4)

2 结果与分析
2.1 火龙果植株分布与数量
2.1.1 分布信息 图2中呈行列分布的白色区域为火龙果,黑色及灰色区域为土壤信息,斑点状零星分布的主要为硬化地表以及裸岩地表。
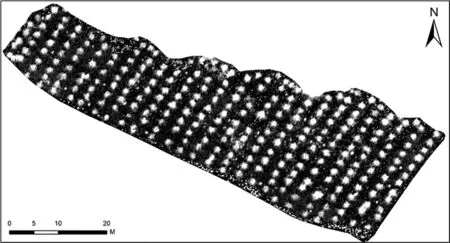
图2 基于可见光波段差异植被指数的火龙果分布
Fig.2 Calculation results of visible light band difference vegetation index on pitaya distribution
2.1.2 种植株数 研究区域内基于低空遥感技术获取的火龙果种植株数为270株(图3),通过目视解译得出研究区火龙果株数为278株(田间实际株数)。验证表明,基于精准农业工具包提取火龙果植株数量精度为97.12%。虽然该方法识别度较高,但是针对火龙果植株颜色较为灰暗以及“连株”的情况不能实现精确提取,存在一定的误差。

图3 基于低空遥感技术提取的火龙果植株数量
Fig.3 Pitaya plants on low-altitude remote sensing technology
2.2 火龙果植株高度与倒伏信息
2.2.1 株高信息 试验区低空遥感技术提取的火龙果株高与实测株高误差平均为5.6 cm。相关性分析表明,实测株高(y)与提取株高(x)的评估模型为y=0.729 7x+0.366 6,决定系数R2=0.721,均方根误差RMSE=0.066 m(图4)。说明,提取值与实测值比较接近,精度较高,表明基于低空遥感技术一定程度上可获取特定区域内的火龙果植株高度。
2.2.2 倒伏植株数量 火龙果倒伏是指由于田间管理不善或受自然灾害造成的植株倒地情况,倒伏的火龙果植株高度均低于正常生长高度。研究区内采用低空遥感技术获取的火龙果倒伏株数为 6株(图5),通过目视解译提取的火龙果倒伏株数为7株(田间实际倒伏株数)。验证表明,基于低空遥感技术配合ArcGIS统计火龙果倒伏植株数量的监测精度为85.71%。

图4 提取株高与实测株高的相关性
Fig.4 Correspondence between extracted plant height and measured plant height
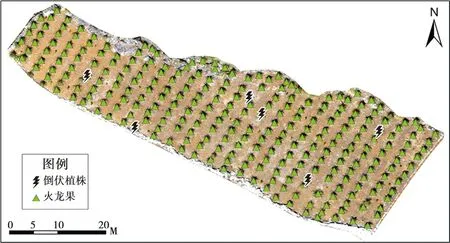
图5 倒伏火龙果植株位置分布
Fig.5 Distribution location of lodging pitaya plants
3 结论与讨论
研究利用低空遥感技术搭载高清数码相机对火龙果种植区域进行数据采集,通过Pix4D结合地面实测像控点(GCP)进行影像拼接,生成高分辨率DOM、DSM以及DEM,借助ENVI精准农业工具包基于高清正射影像进行火龙果植株数量信息提取;对DSM进行滤波处理得到DEM,通过ArcGIS提取出火龙果株高,从而统计出火龙果倒伏株数。对基于低空遥感技术提取到的植株数量与倒伏植株数量进行精度验证得出,火龙果总植株数量提取精度为97.12%,倒伏植株数量提取精度为85.71%,说明基于低空遥感技术结合ENVI以及ArcGIS等辅助工具可实现火龙果种植信息的快速提取,在一定程度上可为火龙果产量估测及精细化管理提供参考依据。
研究所选试验区域面积小,地块较为平坦,田间杂草较少,基于无人机高清正射影像进行火龙果植株信息提取的正确率较理想,但是针对多株火龙果被错分为单株以及植被覆盖复杂、地势起伏区域等情况未进行相关研究,如何进行大面积火龙果种植信息的快速提取将是下一阶段的研究方向。